Літальний апарат “ма-3″

Формула / Реферат
Літальний апарат, що містить кабіну з опорно-посадочним механізмом, двигун, лопаті, встановлені на осях асиметрично для взаємодії з повітряним середовищем, диференціал з розташованими симетрично з боків кабіни напіввалами і пристрій керування лопатями, який відрізняється тим, що кожна лопать на осі має в поперечному перерізі дугоподібний профіль і оснащена противагою, кожен напіввал виконаний у вигляді порожнистої циліндричної труби, що має втулки, в яких принаймні в два ряди уздовж напіввала встановлені осі лопатей симетрично з боків кабіни так, що в кожному ряду осі лопатей розташовані радіально до напіввала на рівних кутових відстанях між ними і частково входять в порожнину напіввала, при цьому пристрій керування лопатями для кожного напіввала розташований в його порожнині і включає конічні шестерні, закріплені на кожній осі лопаті, штангу, пов'язану з важелем керування, встановлену з можливістю обертання співвісно напіввалу, конічні шестерні, що закріплені на штанзі для кожного ряду лопатей з можливістю зчеплення з кожною конічною шестірнею на осі лопаті відповідного ряду дзеркально з боків кабіни, причому передавальне відношення між конічними шестернями на штанзі і конічними шестернями на осях лопатей складає 1:1.
Текст
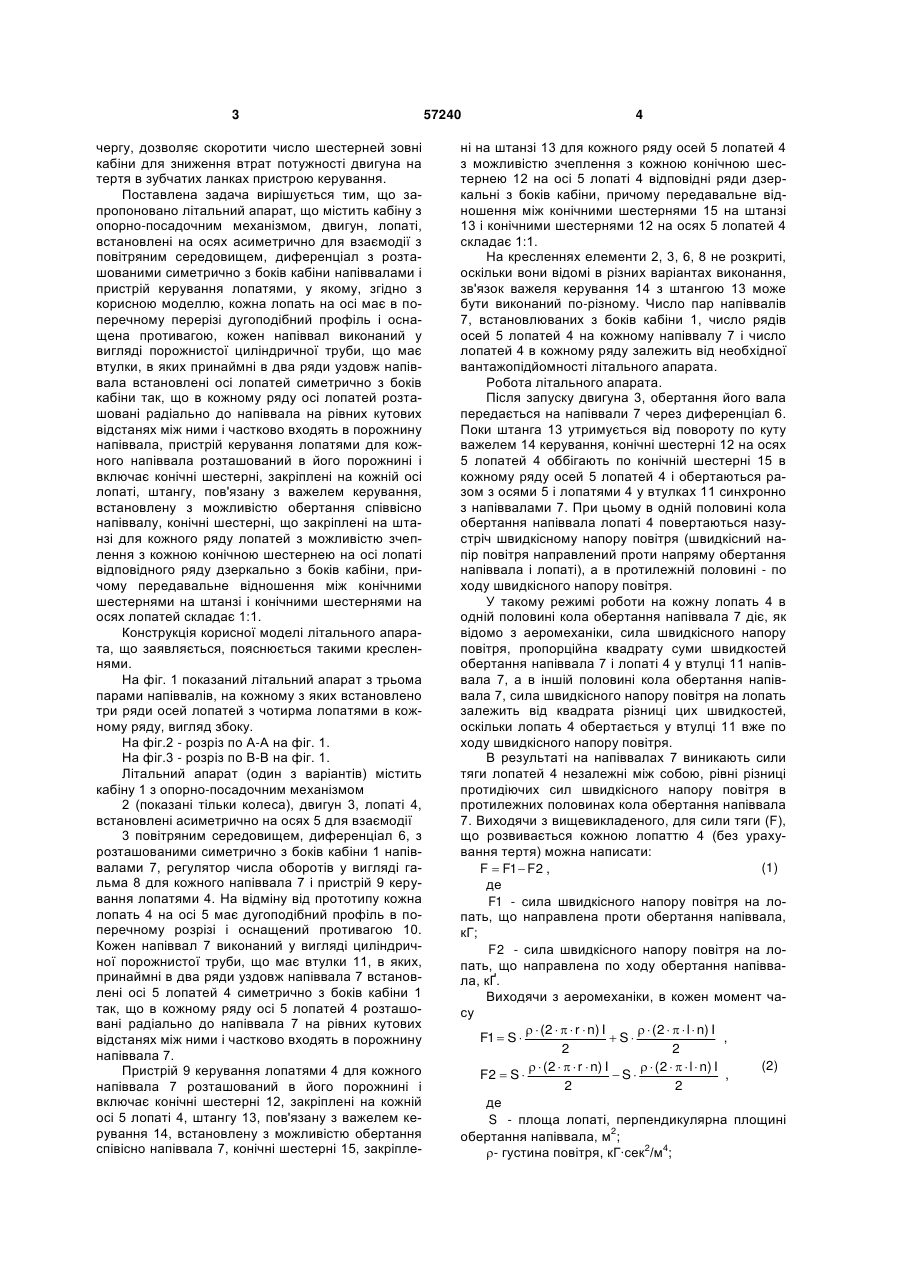
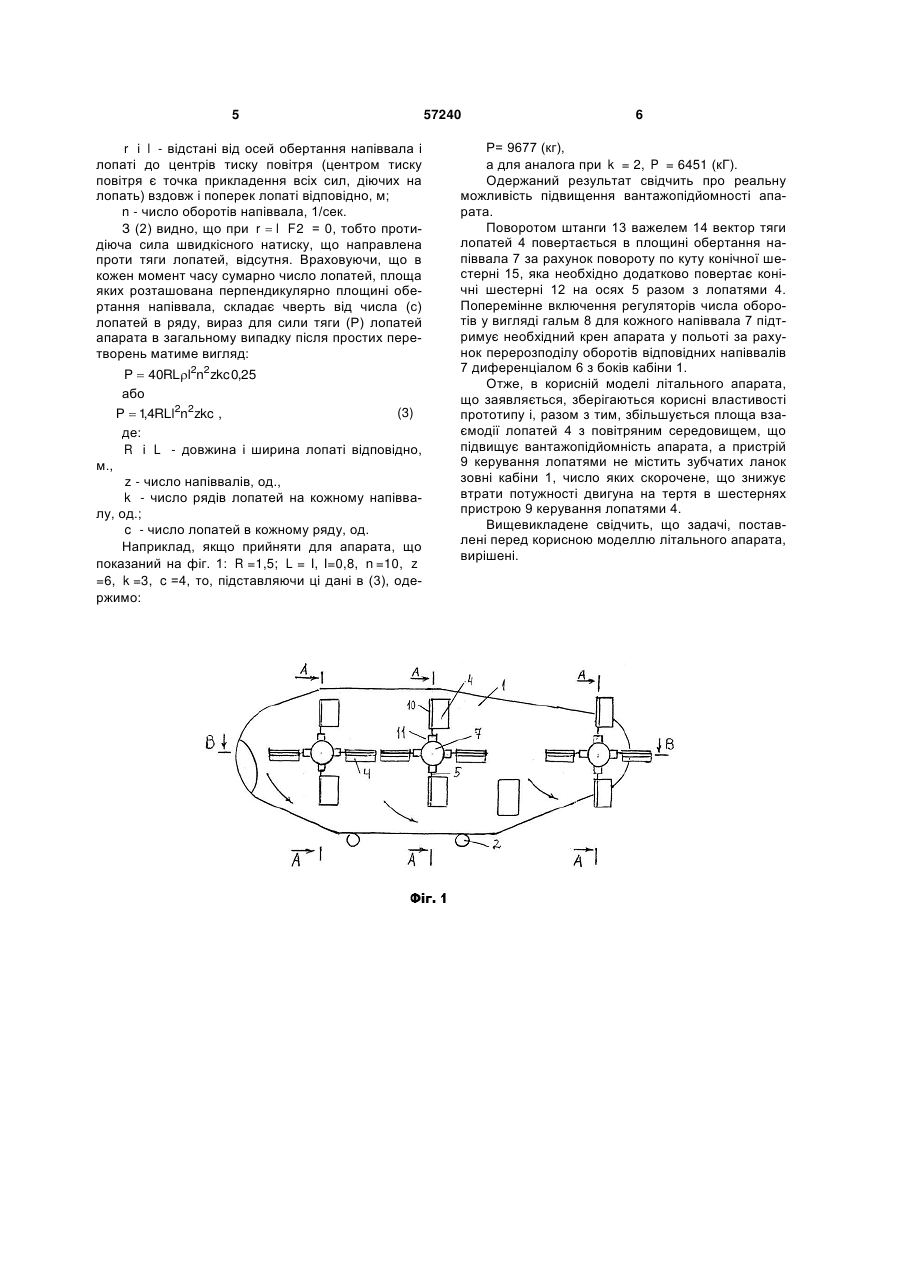
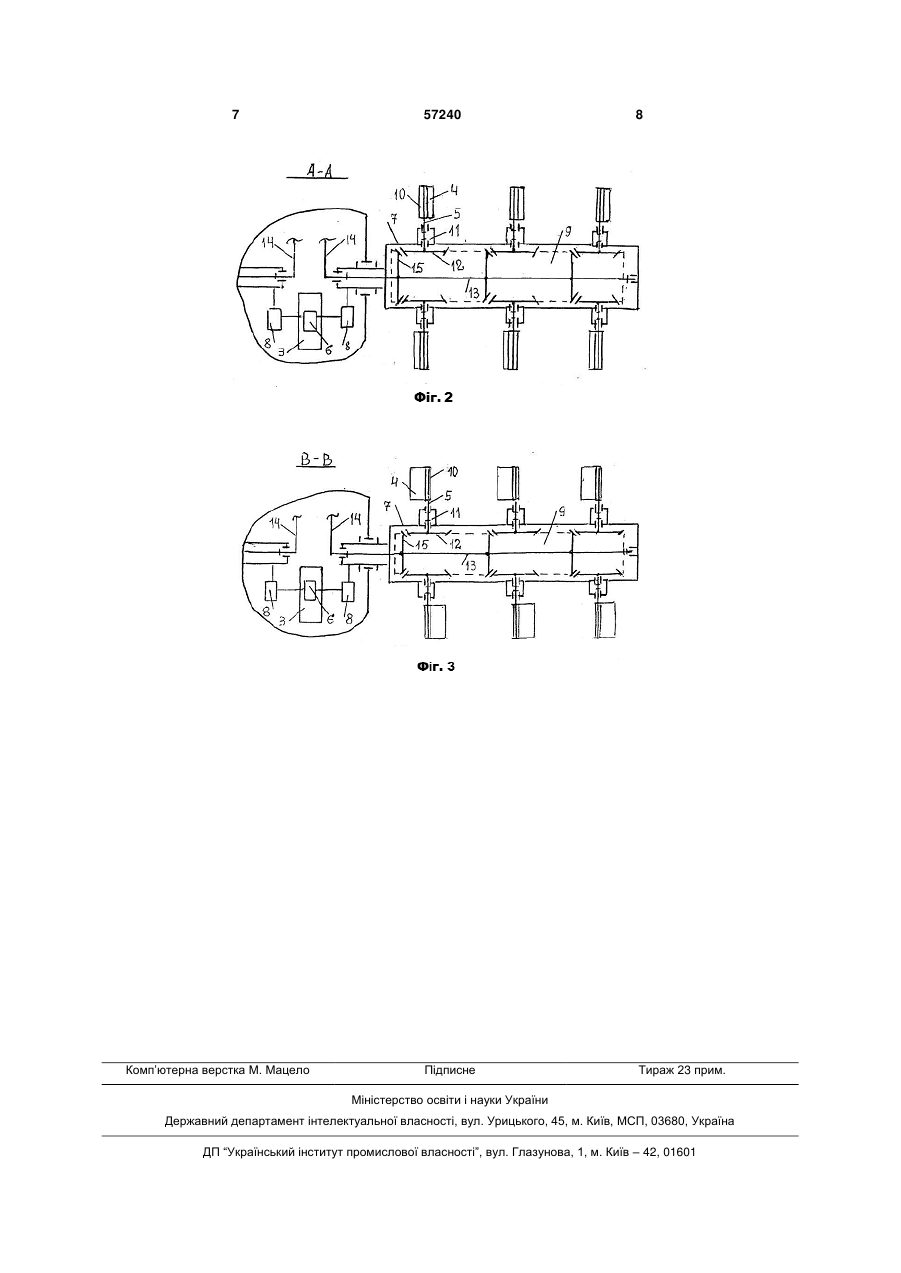
Літальний апарат, що містить кабіну з опорнопосадочним механізмом, двигун, лопаті, встановлені на осях асиметрично для взаємодії з повітряним середовищем, диференціал з розташованими симетрично з боків кабіни напіввалами і пристрій керування лопатями, який відрізняється тим, що кожна лопать на осі має в поперечному перерізі дугоподібний профіль і оснащена противагою, кожен напіввал виконаний у вигляді порожнистої циліндричної труби, що має втулки, в яких принаймні в два ряди уздовж напіввала встановлені 3 чергу, дозволяє скоротити число шестерней зовні кабіни для зниження втрат потужності двигуна на тертя в зубчатих ланках пристрою керування. Поставлена задача вирішується тим, що запропоновано літальний апарат, що містить кабіну з опорно-посадочним механізмом, двигун, лопаті, встановлені на осях асиметрично для взаємодії з повітряним середовищем, диференціал з розташованими симетрично з боків кабіни напіввалами і пристрій керування лопатями, у якому, згідно з корисною моделлю, кожна лопать на осі має в поперечному перерізі дугоподібний профіль і оснащена противагою, кожен напіввал виконаний у вигляді порожнистої циліндричної труби, що має втулки, в яких принаймні в два ряди уздовж напіввала встановлені осі лопатей симетрично з боків кабіни так, що в кожному ряду осі лопатей розташовані радіально до напіввала на рівних кутових відстанях між ними і частково входять в порожнину напіввала, пристрій керування лопатями для кожного напіввала розташований в його порожнині і включає конічні шестерні, закріплені на кожній осі лопаті, штангу, пов'язану з важелем керування, встановлену з можливістю обертання співвісно напіввалу, конічні шестерні, що закріплені на штанзі для кожного ряду лопатей з можливістю зчеплення з кожною конічною шестернею на осі лопаті відповідного ряду дзеркально з боків кабіни, причому передавальне відношення між конічними шестернями на штанзі і конічними шестернями на осях лопатей складає 1:1. Конструкція корисної моделі літального апарата, що заявляється, пояснюється такими кресленнями. На фіг. 1 показаний літальний апарат з трьома парами напіввалів, на кожному з яких встановлено три ряди осей лопатей з чотирма лопатями в кожному ряду, вигляд збоку. На фіг.2 - розріз по А-А на фіг. 1. На фіг.3 - розріз по В-В на фіг. 1. Літальний апарат (один з варіантів) містить кабіну 1 з опорно-посадочним механізмом 2 (показані тільки колеса), двигун 3, лопаті 4, встановлені асиметрично на осях 5 для взаємодії 3 повітряним середовищем, диференціал 6, з розташованими симетрично з боків кабіни 1 напіввалами 7, регулятор числа оборотів у вигляді гальма 8 для кожного напіввала 7 і пристрій 9 керування лопатями 4. На відміну від прототипу кожна лопать 4 на осі 5 має дугоподібний профіль в поперечному розрізі і оснащений противагою 10. Кожен напіввал 7 виконаний у вигляді циліндричної порожнистої труби, що має втулки 11, в яких, принаймні в два ряди уздовж напіввала 7 встановлені осі 5 лопатей 4 симетрично з боків кабіни 1 так, що в кожному ряду осі 5 лопатей 4 розташовані радіально до напіввала 7 на рівних кутових відстанях між ними і частково входять в порожнину напіввала 7. Пристрій 9 керування лопатями 4 для кожного напіввала 7 розташований в його порожнині і включає конічні шестерні 12, закріплені на кожній осі 5 лопаті 4, штангу 13, пов'язану з важелем керування 14, встановлену з можливістю обертання співісно напіввала 7, конічні шестерні 15, закріпле 57240 4 ні на штанзі 13 для кожного ряду осей 5 лопатей 4 з можливістю зчеплення з кожною конічною шестернею 12 на осі 5 лопаті 4 відповідні ряди дзеркальні з боків кабіни, причому передавальне відношення між конічними шестернями 15 на штанзі 13 і конічними шестернями 12 на осях 5 лопатей 4 складає 1:1. На кресленнях елементи 2, 3, 6, 8 не розкриті, оскільки вони відомі в різних варіантах виконання, зв'язок важеля керування 14 з штангою 13 може бути виконаний по-різному. Число пар напіввалів 7, встановлюваних з боків кабіни 1, число рядів осей 5 лопатей 4 на кожному напіввалу 7 і число лопатей 4 в кожному ряду залежить від необхідної вантажопідйомності літального апарата. Робота літального апарата. Після запуску двигуна 3, обертання його вала передається на напіввали 7 через диференціал 6. Поки штанга 13 утримується від повороту по куту важелем 14 керування, конічні шестерні 12 на осях 5 лопатей 4 оббігають по конічній шестерні 15 в кожному ряду осей 5 лопатей 4 і обертаються разом з осями 5 і лопатями 4 у втулках 11 синхронно з напіввалами 7. При цьому в одній половині кола обертання напіввала лопаті 4 повертаються назустріч швидкісному напору повітря (швидкісний напір повітря направлений проти напряму обертання напіввала і лопаті), а в протилежній половині - по ходу швидкісного напору повітря. У такому режимі роботи на кожну лопать 4 в одній половині кола обертання напіввала 7 діє, як відомо з аеромеханіки, сила швидкісного напору повітря, пропорційна квадрату суми швидкостей обертання напіввала 7 і лопаті 4 у втулці 11 напіввала 7, а в іншій половині кола обертання напіввала 7, сила швидкісного напору повітря на лопать залежить від квадрата різниці цих швидкостей, оскільки лопать 4 обертається у втулці 11 вже по ходу швидкісного напору повітря. В результаті на напіввалах 7 виникають сили тяги лопатей 4 незалежні між собою, рівні різниці протидіючих сил швидкісного напору повітря в протилежних половинах кола обертання напіввала 7. Виходячи з вищевикладеного, для сили тяги (F), що розвивається кожною лопаттю 4 (без урахування тертя) можна написати: (1) F F1 F2 , де F1 - сила швидкісного напору повітря на лопать, що направлена проти обертання напіввала, кГ; F 2 - сила швидкісного напору повітря на лопать, що направлена по ходу обертання напіввала, кҐ. Виходячи з аеромеханіки, в кожен момент часу ( 2 r n) I ( 2 l n) I , F1 S S 2 2 (2) ( 2 r n) I ( 2 l n) I , F2 S S 2 2 де S - площа лопаті, перпендикулярна площині обертання напіввала, м2; - густина повітря, кГ·cек2/м4; 5 r і l - відстані від осей обертання напіввала і лопаті до центрів тиску повітря (центром тиску повітря є точка прикладення всіх сил, діючих на лопать) вздовж і поперек лопаті відповідно, м; n - число оборотів напіввала, 1/сек. З (2) видно, що при r l F 2 = 0, тобто протидіюча сила швидкісного натиску, що направлена проти тяги лопатей, відсутня. Враховуючи, що в кожен момент часу сумарно число лопатей, площа яких розташована перпендикулярно площині обертання напіввала, складає чверть від числа (с) лопатей в ряду, вираз для сили тяги (Р) лопатей апарата в загальному випадку після простих перетворень матиме вигляд: P 40RLl2n2zkc 0,25 або (3) P 1 4RLl2n2zkc , , де: R і L - довжина і ширина лопаті відповідно, м., z - число напіввалів, од., k - число рядів лопатей на кожному напіввалу, од.; c - число лопатей в кожному ряду, од. Наприклад, якщо прийняти для апарата, що показаний на фіг. 1: R =1,5; L = I, I=0,8, n =10, z =6, k =3, c =4, то, підставляючи ці дані в (3), одержимо: 57240 6 Р= 9677 (кг), а для аналога при k = 2, P = 6451 (кГ). Одержаний результат свідчить про реальну можливість підвищення вантажопідйомності апарата. Поворотом штанги 13 важелем 14 вектор тяги лопатей 4 повертається в площині обертання напіввала 7 за рахунок повороту по куту конічної шестерні 15, яка необхідно додатково повертає конічні шестерні 12 на осях 5 разом з лопатями 4. Поперемінне включення регуляторів числа оборотів у вигляді гальм 8 для кожного напіввала 7 підтримує необхідний крен апарата у польоті за рахунок перерозподілу оборотів відповідних напіввалів 7 диференціалом 6 з боків кабіни 1. Отже, в корисній моделі літального апарата, що заявляється, зберігаються корисні властивості прототипу і, разом з тим, збільшується площа взаємодії лопатей 4 з повітряним середовищем, що підвищує вантажопідйомність апарата, а пристрій 9 керування лопатями не містить зубчатих ланок зовні кабіни 1, число яких скорочене, що знижує втрати потужності двигуна на тертя в шестернях пристрою 9 керування лопатями 4. Вищевикладене свідчить, що задачі, поставлені перед корисною моделлю літального апарата, вирішені. 7 Комп’ютерна верстка М. Мацело 57240 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAircraft "ma-3"
Автори англійськоюMazykin Borys Havrylovych
Назва патенту російськоюЛетательный аппарат "ma-3"
Автори російськоюМазыкин Борис Гаврилович
МПК / Мітки
МПК: B64C 11/00, B64C 33/00, B64C 27/00
Мітки: літальний, апарат, ма-3
Код посилання
<a href="https://ua.patents.su/4-57240-litalnijj-aparat-ma-3.html" target="_blank" rel="follow" title="База патентів України">Літальний апарат “ма-3″</a>
Літальний апарат

Номер патенту: 51793
Опубліковано: 16.12.2002
Автор: Мазикін Борис Гаврилович
МПК: B64C 39/00
Формула / Реферат:
1. Літальний апарат, який має кабіну з посадочно-опорним механізмом, двигун, кінематично зв'язаний з взаємодіючими з повітряним середовищем лопатями, і прилад управління, який відрізняється тим, що він має лопаті, які попарно установлені щонайменше на двох спільних осях, які мають важелі, з зсувом між лопатями на кут 90°, причому осі лопатей закріплені симетрично і перпендикулярно щодо центрального піввала з можливістю повороту у втулках на...
Літальний апарат

Номер патенту: 58564
Опубліковано: 15.08.2003
Автор: Азар'єв Ігор Олександрович
Формула / Реферат:
Літальний апарат, який містить фюзеляж, шасі, оперення та крила з керуючими поверхнями, а також привід керуючих поверхонь, який відрізняється тим, що крила встановлені вільно на осях, закріплених на фюзеляжі в режимі флюгерування.
Літальний апарат

Номер патенту: 69524
Опубліковано: 15.09.2004
Автори: Купчак Микола Михайлович, Купчак Михайло Михайлович, Купчак Петро Михайлович, Купчак Василь Михайлович, Купчак Іван Михайлович
МПК: B64C 39/00
Формула / Реферат:
Літальний апарат, який виконано по типу літаючої тарілки, що складається з циліндричного корпусу, двигунів, який відрізняється тим, що має густорозташовані лопаті, які виконані у формі пташиного крила.
Безкільовий літальний апарат

Номер патенту: 13450
Опубліковано: 17.04.2006
Автор: Цюренко Валентин Андрійович
МПК: B64C 29/00, B64C 39/02
Мітки: літальний, апарат, безкільовий
Формула / Реферат:
1. Безкільовий літальний апарат, що складається зі зв’язаних в єдиний робочий комплекс кабіни для пілотів з приладами для навігації, відсіку для ємностей з паливом та з речовинами, необхідними для життєдіяльності людей, рухомої платформи з закріпленим двигуном, турбіни вертикального зльоту та посадки з автономним приводом від двигуна та висувних штанг для приземлення, що містить самогравітаційну турбіну, яка знаходиться зовні робочого...
Літальний апарат на турбоаеродинамічному підвісі
Номер патенту: 34036
Опубліковано: 25.07.2008
Автор: Цюренко Валентин Андрійович
МПК: B61B 13/08, F01D 1/00, F03G 7/00, F16H 33/00
Мітки: турбоаеродинамічному, літальний, підвісі, апарат
Формула / Реферат:
Літальний апарат на турбоаеродинамічному підвісі, який складається з робочої кабіни для пілотів, оснащеної навігаційними приладами, причому в його лобовій площині розміщена одна або кілька самогравітаційних турбін, самогравітаційної турбіни, яка розміщена перед центральною поперечною лінією осі, з порожнистою ємністю у вигляді зрізаної прямокутної піраміди, яка обладнана роз'ємними створами в нижній частині площини, верхньою площиною якої є...
Попередній патент: Газовий пальник
Наступний патент: Пристрій для обпирання тіл довільної форми
Випадковий патент: Апарат повітряного охолодження