Електромагнітний спосіб контролю плоского напружено-деформованого стану матеріалу
Номер патенту: 77558
Опубліковано: 15.12.2006
Формула / Реферат
1. Електромагнітний спосіб контролю плоского напружено-деформованого стану матеріалу, який полягає в тому, що вводять у взаємодію з контрольованим матеріалом орієнтований електромагнітний потік магнітопружного датчика із трьох П-подібних магнітопроводів, розвертають датчик по поверхні контрольованого матеріалу навколо його вертикальної осі симетрії так, щоб орієнтований потік пройшов по черзі в різних напрямах по всій поверхні контрольованого матеріалу відносно прийнятого початкового напряму, одночасно вимірюють з вимірювальної обмотки середнього магнітопроводу вихідні сигнали, на основі тарувальної залежності вихідного сигналу від величини механічної напруги визначають величину і знак головних максимальної ![]() і мінімальної
і мінімальної ![]() механічних напруг, який відрізняється тим, що на поверхні контрольованого матеріалу розташовують матрицю ідентичних П-подібних магнітопроводів полюсами по лініях кіл симетрично один одному, по черзі із кожних трьох магнітопроводів формують магнітопружний датчик і з'єднують їх обмотки збудження так, щоб орієнтований магнітний потік середнього магнітопроводу пройшов по черзі в різних напрямах по поверхні контрольованого матеріалу, по попередньо збудованій у вигляді контуру тарувальній діаграмі залежності між значеннями головних максимальної
механічних напруг, який відрізняється тим, що на поверхні контрольованого матеріалу розташовують матрицю ідентичних П-подібних магнітопроводів полюсами по лініях кіл симетрично один одному, по черзі із кожних трьох магнітопроводів формують магнітопружний датчик і з'єднують їх обмотки збудження так, щоб орієнтований магнітний потік середнього магнітопроводу пройшов по черзі в різних напрямах по поверхні контрольованого матеріалу, по попередньо збудованій у вигляді контуру тарувальній діаграмі залежності між значеннями головних максимальної ![]() і мінімальної
і мінімальної ![]() механічних напруг до моменту текучості матеріалу проводять оцінку напружено-деформованого стану матеріалу, якщо вектор головних напруг
механічних напруг до моменту текучості матеріалу проводять оцінку напружено-деформованого стану матеріалу, якщо вектор головних напруг ![]() знаходиться усередині контуру, то напружено-деформований стан матеріалу відповідає області пружних деформацій, якщо вектор головних напруг
знаходиться усередині контуру, то напружено-деформований стан матеріалу відповідає області пружних деформацій, якщо вектор головних напруг ![]() знаходиться за лінією контуру, то напружено-деформований стан матеріалу відповідає області пластичних деформацій.
знаходиться за лінією контуру, то напружено-деформований стан матеріалу відповідає області пластичних деформацій.
2. Спосіб за п. 1, який відрізняється тим, що всі П-подібні магнітопроводи скріплені між собою, на кожному магнітопроводі розташовані обмотка збудження і вимірювальна, виходи всіх обмоток з'єднані з входом пристрою контролю напружено-деформованого стану контрольованого матеріалу.
3. Спосіб за п. 1 або п. 2, який відрізняється тим, що пристрій контролю напружено-деформованого стану матеріалу містить два програмно-керованих комутатори, до входів першого комутатора підключені виходи обмоток збудження магнітопружних датчиків, один вихід комутатора підключений до джерела змінного струму, другий вихід до входу блока обробки і вимірювання вихідних сигналів, до входів другого комутатора підключені вимірювальні обмотки магнітопружних датчиків, два виходи другого комутатора підключені до входів пристрою обробки і вимірювання вихідних сигналів.
Текст
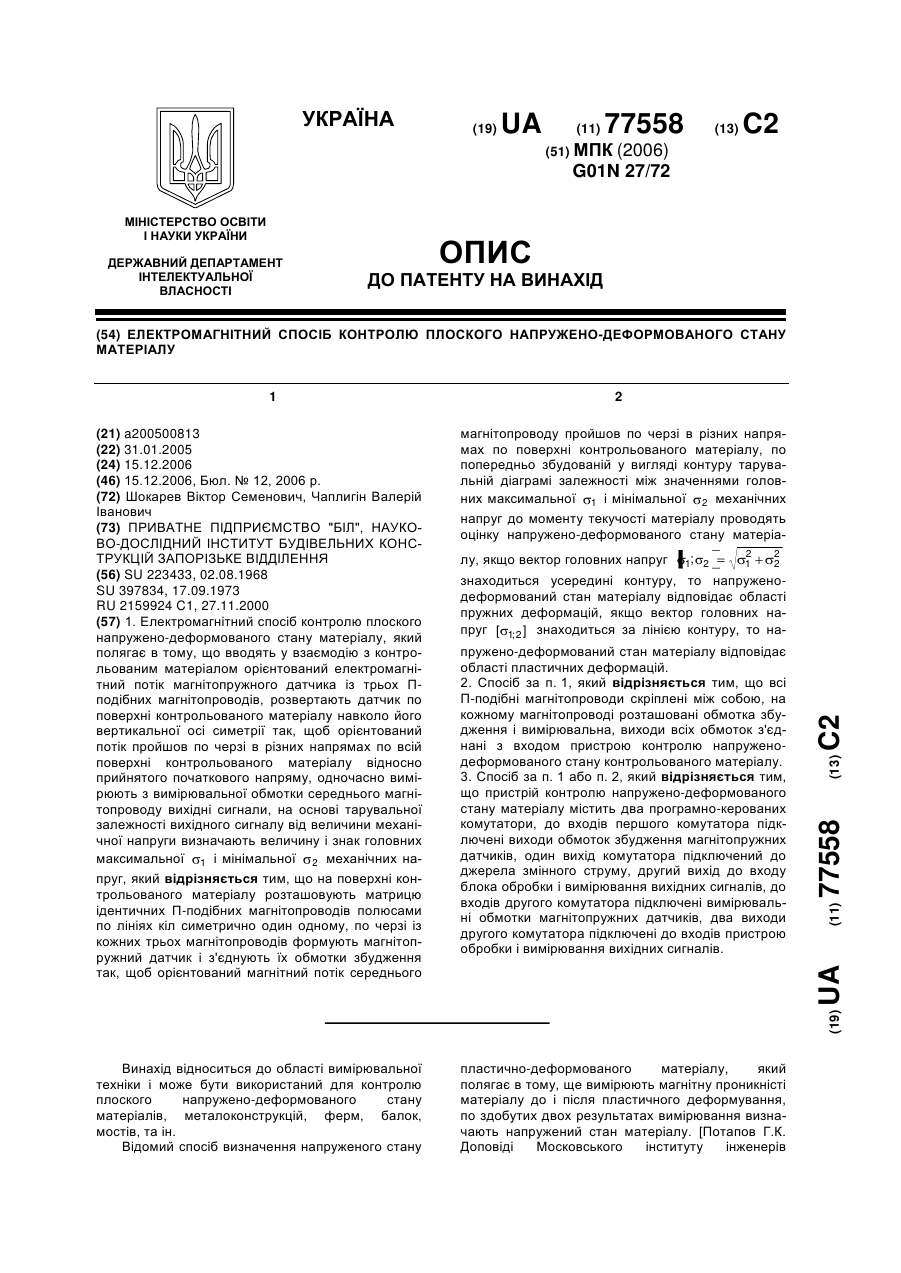
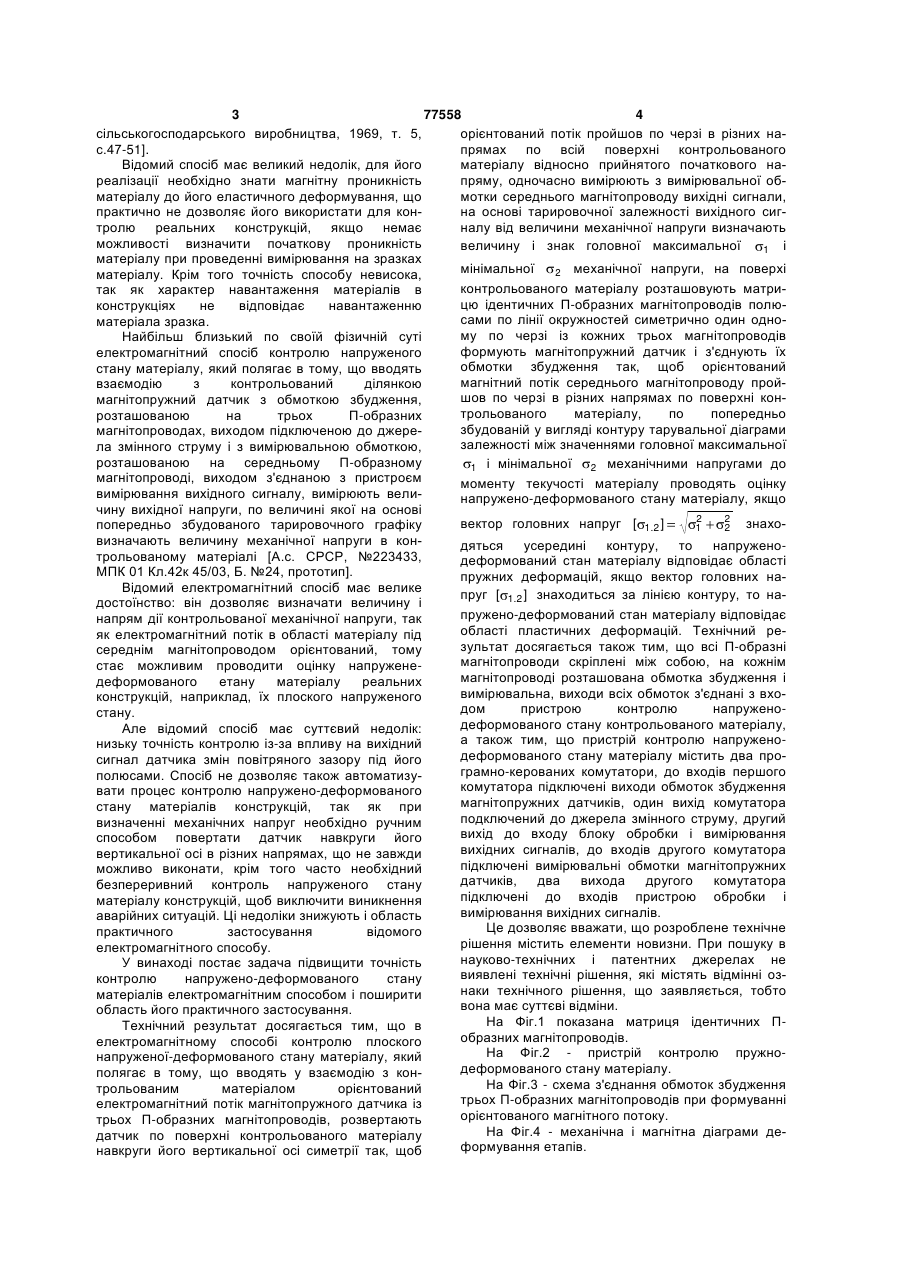
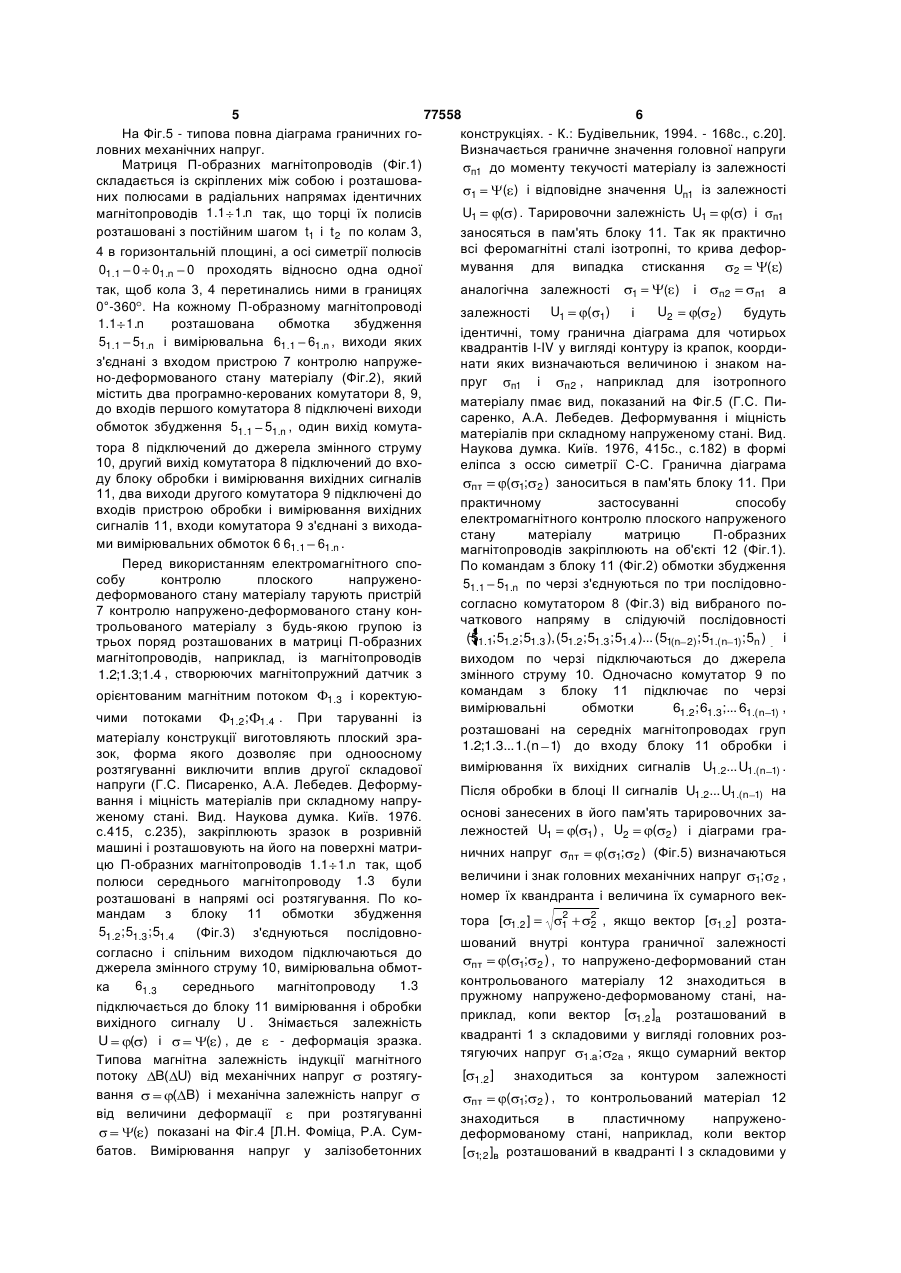
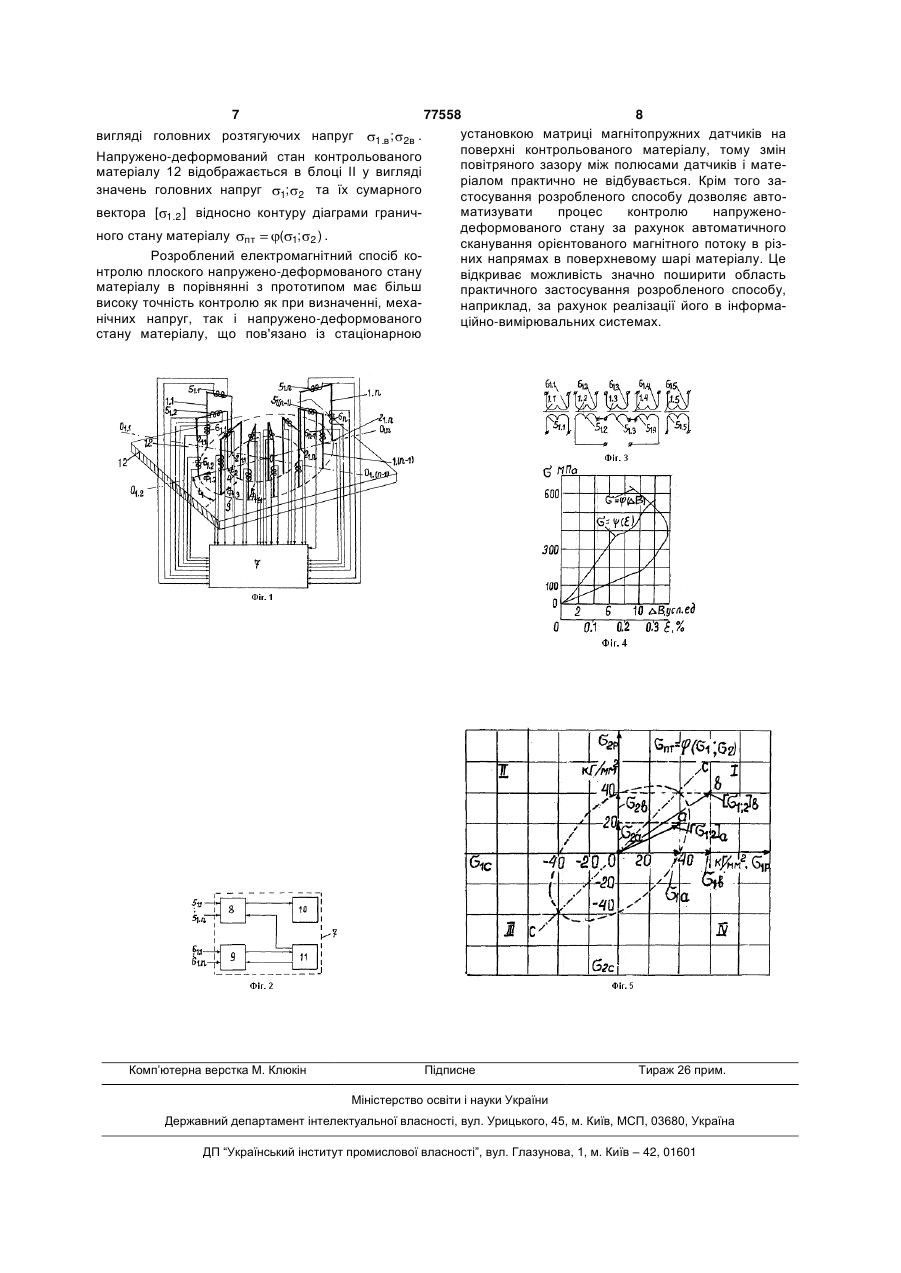
1. Електромагнітний спосіб контролю плоского напружено-деформованого стану матеріалу, який полягає в тому, що вводять у взаємодію з контрольованим матеріалом орієнтований електромагнітний потік магнітопружного датчика із трьох Пподібних магнітопроводів, розвертають датчик по поверхні контрольованого матеріалу навколо його вертикальної осі симетрії так, щоб орієнтований потік пройшов по черзі в різних напрямах по всій поверхні контрольованого матеріалу відносно прийнятого початкового напряму, одночасно вимірюють з вимірювальної обмотки середнього магнітопроводу вихідні сигнали, на основі тарувальної залежності вихідного сигналу від величини механічної напруги визначають величину і знак головних максимальної 1 і мінімальної 2 механічних напруг, який відрізняється тим, що на поверхні контрольованого матеріалу розташовують матрицю ідентичних П-подібних магнітопроводів полюсами по лініях кіл симетрично один одному, по черзі із кожних трьох магнітопроводів формують магнітопружний датчик і з'єднують їх обмотки збудження так, щоб орієнтований магнітний потік середнього магнітопроводу пройшов по черзі в різних напрямах по поверхні контрольованого матеріалу, по попередньо збудованій у вигляді контуру тарувальній діаграмі залежності між значеннями головних максимальної 1 і мінімальної 2 механічних напруг до моменту текучості матеріалу проводять оцінку напружено-деформованого стану матеріа Винахід відноситься до області вимірювальної техніки і може бути використаний для контролю плоского напружено-деформованого стану матеріалів, металоконструкцій, ферм, балок, мостів, та ін. Відомий спосіб визначення напруженого стану пластично-деформованого матеріалу, який полягає в тому, ще вимірюють магнітну проникністі матеріалу до і після пластичного деформування, по здобутих двох результатах вимірювання визначають напружений стан матеріалу. [Потапов Г.К. Доповіді Московського інституту інженерів лу, якщо вектор головних напруг 1; 2 2 1 2 2 (13) 77558 (11) (19) UA пружено-деформований стан матеріалу відповідає області пластичних деформацій. 2. Спосіб за п. 1, який відрізняється тим, що всі П-подібні магнітопроводи скріплені між собою, на кожному магнітопроводі розташовані обмотка збудження і вимірювальна, виходи всіх обмоток з'єднані з входом пристрою контролю напруженодеформованого стану контрольованого матеріалу. 3. Спосіб за п. 1 або п. 2, який відрізняється тим, що пристрій контролю напружено-деформованого стану матеріалу містить два програмно-керованих комутатори, до входів першого комутатора підключені виходи обмоток збудження магнітопружних датчиків, один вихід комутатора підключений до джерела змінного струму, другий вихід до входу блока обробки і вимірювання вихідних сигналів, до входів другого комутатора підключені вимірювальні обмотки магнітопружних датчиків, два виходи другого комутатора підключені до входів пристрою обробки і вимірювання вихідних сигналів. C2 знаходиться усередині контуру, то напруженодеформований стан матеріалу відповідає області пружних деформацій, якщо вектор головних напруг [ 1; 2 ] знаходиться за лінією контуру, то на 3 77558 4 сільськогосподарського виробництва, 1969, т. 5, орієнтований потік пройшов по черзі в різних нас.47-51]. прямах по всій поверхні контрольованого Відомий спосіб має великий недолік, для його матеріалу відносно прийнятого початкового нареалізації необхідно знати магнітну проникність пряму, одночасно вимірюють з вимірювальної обматеріалу до його еластичного деформування, що мотки середнього магнітопроводу вихідні сигнали, практично не дозволяє його використати для конна основі тарировочної залежності вихідного сигтролю реальних конструкцій, якщо немає налу від величини механічної напруги визначають можливості визначити початкову проникність величину і знак головної максимальної 1 і матеріалу при проведенні вимірювання на зразках мінімальної 2 механічної напруги, на поверхі матеріалу. Крім того точність способу невисока, контрольованого матеріалу розташовують матритак як характер навантаження матеріалів в цю ідентичних П-образних магнітопроводів полюконструкціях не відповідає навантаженню сами по лінії окружностей симетрично один одноматеріала зразка. му по черзі із кожних трьох магнітопроводів Найбільш близький по своїй фізичній суті формують магнітопружний датчик і з'єднують їх електромагнітний спосіб контролю напруженого обмотки збудження так, щоб орієнтований стану матеріалу, який полягає в тому, що вводять магнітний потік середнього магнітопроводу пройвзаємодію з контрольований ділянкою шов по черзі в різних напрямах по поверхні конмагнітопружний датчик з обмоткою збудження, трольованого матеріалу, по попередньо розташованою на трьох П-образних збудованій у вигляді контуру тарувальної діаграми магнітопроводах, виходом підключеною до джерезалежності між значеннями головної максимальної ла змінного струму і з вимірювальною обмоткою, розташованою на середньому П-образному 1 і мінімальної 2 механічними напругами до магнітопроводі, виходом з'єднаною з пристроєм моменту текучості матеріалу проводять оцінку вимірювання вихідного сигналу, вимірюють велинапружено-деформованого стану матеріалу, якщо чину вихідної напруги, по величині якої на основі 2 2 вектор головних напруг [ 1.2 ] попередньо збудованого тарировочного графіку 1 2 знаховизначають величину механічної напруги в кондяться усередині контуру, то напруженотрольованому матеріалі [А.с. СРСР, №223433, деформований стан матеріалу відповідає області МПК 01 Кл.42к 45/03, Б. №24, прототип]. пружних деформацій, якщо вектор головних наВідомий електромагнітний спосіб має велике пруг [ 1.2 ] знаходиться за лінією контуру, то надостоїнство: він дозволяє визначати величину і пружено-деформований стан матеріалу відповідає напрям дії контрольованої механічної напруги, так області пластичних деформацій. Технічний реяк електромагнітний потік в області матеріалу під зультат досягається також тим, що всі П-образні середнім магнітопроводом орієнтований, тому магнітопроводи скріплені між собою, на кожнім стає можливим проводити оцінку напруженемагнітопроводі розташована обмотка збудження і деформованого етану матеріалу реальних вимірювальна, виходи всіх обмоток з'єднані з вхоконструкцій, наприклад, їх плоского напруженого дом пристрою контролю напруженостану. деформованого стану контрольованого матеріалу, Але відомий спосіб має суттєвий недолік: а також тим, що пристрій контролю напруженонизьку точність контролю із-за впливу на вихідний деформованого стану матеріалу містить два просигнал датчика змін повітряного зазору під його грамно-керованих комутатори, до входів першого полюсами. Спосіб не дозволяє також автоматизукомутатора підключені виходи обмоток збудження вати процес контролю напружено-деформованого магнітопружних датчиків, один вихід комутатора стану матеріалів конструкцій, так як при подключений до джерела змінного струму, другий визначенні механічних напруг необхідно ручним вихід до входу блоку обробки і вимірювання способом повертати датчик навкруги його вихідних сигналів, до входів другого комутатора вертикальної осі в різних напрямах, що не завжди підключені вимірювальні обмотки магнітопружних можливо виконати, крім того часто необхідний датчиків, два вихода другого комутатора безпереривний контроль напруженого стану підключені до входів пристрою обробки і матеріалу конструкцій, щоб виключити виникнення вимірювання вихідних сигналів. аварійних ситуацій. Ці недоліки знижують і область Це дозволяє вважати, що розроблене технічне практичного застосування відомого рішення містить елементи новизни. При пошуку в електромагнітного способу. науково-технічних і патентних джерелах не У винаході постає задача підвищити точність виявлені технічні рішення, які містять відмінні озконтролю напружено-деформованого стану наки технічного рішення, що заявляється, тобто матеріалів електромагнітним способом і поширити вона має суттєві відміни. область його практичного застосування. На Фіг.1 показана матриця ідентичних ПТехнічний результат досягається тим, що в образних магнітопроводів. електромагнітному способі контролю плоского На Фіг.2 - пристрій контролю пружнонапруженої-деформованого стану матеріалу, який деформованого стану матеріалу. полягає в тому, що вводять у взаємодію з конНа Фіг.3 - схема з'єднання обмоток збудження трольованим матеріалом орієнтований трьох П-образних магнітопроводів при формуванні електромагнітний потік магнітопружного датчика із орієнтованого магнітного потоку. трьох П-образних магнітопроводів, розвертають На Фіг.4 - механічна і магнітна діаграми дедатчик по поверхні контрольованого матеріалу формування етапів. навкруги його вертикальної осі симетрії так, щоб 5 77558 6 На Фіг.5 - типова повна діаграма граничних гоконструкціях. - К.: Будівельник, 1994. - 168с., с.20]. ловних механічних напруг. Визначається граничне значення головної напруги Матриця П-образних магнітопроводів (Фіг.1) п1 до моменту текучості матеріалу із залежності складається із скріплених між собою і розташова( ) і відповідне значення Uп1 із залежності 1 них полюсами в радіальних напрямах ідентичних U1 ( ) . Тарировочни залежність U1 ( ) і п1 магнітопроводів 1.1 1.n так, що торці їх полисів розташовані з постійним шагом t1 і t 2 по колам 3, заносяться в пам'ять блоку 11. Так як практично всі феромагнітні сталі ізотропні, то крива дефор4 в горизонтальній площині, а осі симетрії полюсів ( ) мування для випадка стискання 01.1 0 01.n 0 проходять відносно одна одної 2 ( ) і аналогічна залежності так, щоб кола 3, 4 перетинались ними в границях 1 п2 п1 а 0°-360 . На кожному П-образному магнітопроводі ( 1) U2 ( 2) залежності U1 і будуть 1.1 1.n розташована обмотка збудження ідентичні, тому гранична діаграма для чотирьох 51.1 51.n і вимірювальна 61.1 61.n , виходи яких квадрантів І-IV у вигляді контуру із крапок, коордиз'єднані з входом пристрою 7 контролю напруженати яких визначаються величиною і знаком нано-деформованого стану матеріалу (Фіг.2), який пруг і п1 п 2 , наприклад для ізотропного містить два програмно-керованих комутатори 8, 9, матеріалу пмає вид, показаний на Фіг.5 (Г.С. Пидо входів першого комутатора 8 підключені виходи саренко, А.А. Лебедев. Деформування і міцність обмоток збудження 51.1 51.n , один вихід комутаматеріалів при складному напруженому стані. Вид. тора 8 підключений до джерела змінного струму Наукова думка. Київ. 1976, 415с., с.182) в формі 10, другий вихід комутатора 8 підключений до вхоеліпса з оссю симетрії С-С. Гранична діаграма ду блоку обробки і вимірювання вихідних сигналів ( 1; 2 ) заноситься в пам'ять блоку 11. При пт 11, два виходи другого комутатора 9 підключені до практичному застосуванні способу входів пристрою обробки і вимірювання вихідних електромагнітного контролю плоского напруженого сигналів 11, входи комутатора 9 з'єднані з виходастану матеріалу матрицю П-образних ми вимірювальних обмоток 6 61.1 61.n . магнітопроводів закріплюють на об'єкті 12 (Фіг.1). Перед використанням електромагнітного споПо командам з блоку 11 (Фіг.2) обмотки збудження собу контролю плоского напружено51.1 51.n по черзі з'єднуються по три послідовнодеформованого стану матеріалу тарують пристрій согласно комутатором 8 (Фіг.3) від вибраного по7 контролю напружено-деформованого стану кончаткового напряму в слідуючій послідовності трольованого матеріалу з будь-якою групою із (51.1; 51.2; 51.3 ), (51.2; 51.3; 51.4 )... (51(n 2); 51.( n 1); 5n ) і трьох поряд розташованих в матриці П-образних магнітопроводів, наприклад, із магнітопроводів 1.2;1.3;1.4 , створюючих магнітопружний датчик з орієнтованим магнітним потоком 1 .3 і коректую чими потоками 1.2 ; 1.4 . При таруванні із матеріалу конструкції виготовляють плоский зразок, форма якого дозволяє при одноосному розтягуванні виключити вплив другої складової напруги (Г.С. Писаренко, А.А. Лебедев. Деформування і міцність матеріалів при складному напруженому стані. Вид. Наукова думка. Київ. 1976. с.415, с.235), закріплюють зразок в розривній машині і розташовують на його на поверхні матрицю П-образних магнітопроводів 1.1 1.n так, щоб полюси середнього магнітопроводу 1.3 були розташовані в напрямі осі розтягування. По командам з блоку 11 обмотки збудження 51.2; 51.3 ; 51.4 (Фіг.3) з'єднуються послідовносогласно і спільним виходом підключаються до джерела змінного струму 10, вимірювальна обмот61.3 1.3 ка середнього магнітопроводу підключається до блоку 11 вимірювання і обробки вихідного сигналу U . Знімається залежність - деформація зразка. U ( ) і ( ) , де Типова магнітна залежність індукції магнітного потоку B( U) від механічних напруг розтягування ( B) і механічна залежність напруг від величини деформації при розтягуванні ( ) показані на Фіг.4 [Л.Н. Фоміца, Р.А. Сумбатов. Вимірювання напруг у залізобетонних виходом по черзі підключаються до джерела змінного струму 10. Одночасно комутатор 9 по командам з блоку 11 підключає по черзі вимірювальні обмотки 61.2; 61.3;... 61.( n 1) , розташовані на середніх магнітопроводах груп 1.2;1.3... 1.(n 1) до входу блоку 11 обробки і вимірювання їх вихідних сигналів U1.2... U1.( n 1) . Після обробки в блоці ІІ сигналів U1.2... U1.( n на 1) основі занесених в його пам'ять тарировочних за( 1) , U2 ( 2 ) і діаграми гралежностей U1 ничних напруг ( 1; пт 2) (Фіг.5) визначаються величини і знак головних механічних напруг 1; 2 , номер їх квандранта і величина їх сумарного вектора [ 1.2 ] 2 1 2 2 , якщо вектор [ 1 .2 ] розта шований внутрі контура граничної залежності ( 1; 2 ) , то напружено-деформований стан пт контрольованого матеріалу 12 знаходиться в пружному напружено-деформованому стані, наприклад, копи вектор [ 1.2 ]a розташований в квадранті 1 з складовими у вигляді головних розтягуючих напруг 1.a ; 2a , якщо сумарний вектор [ 1 .2 ] знаходиться за контуром залежності ( 1; 2 ) , то контрольований матеріал 12 пт знаходиться в пластичному напруженодеформованому стані, наприклад, коли вектор [ 1; 2 ]в розташований в квадранті І з складовими у 7 77558 8 установкою матриці магнітопружних датчиків на вигляді головних розтягуючих напруг 1.в ; 2в . поверхні контрольованого матеріалу, тому змін Напружено-деформований стан контрольованого повітряного зазору між полюсами датчиків і математеріалу 12 відображається в блоці II у вигляді ріалом практично не відбувається. Крім того зазначень головних напруг 1; 2 та їх сумарного стосування розробленого способу дозволяє автоматизувати процес контролю напруженовектора [ 1.2 ] відносно контуру діаграми граничдеформованого стану за рахунок автоматичного ( 1; 2 ) . ного стану матеріалу пт сканування орієнтованого магнітного потоку в різРозроблений електромагнітний спосіб коних напрямах в поверхневому шарі матеріалу. Це нтролю плоского напружено-деформованого стану відкриває можливість значно поширити область матеріалу в порівнянні з прототипом має більш практичного застосування розробленого способу, високу точність контролю як при визначенні, механаприклад, за рахунок реалізації його в інформанічних напруг, так і напружено-деформованого ційно-вимірювальних системах. стану матеріалу, що пов'язано із стаціонарною Комп’ютерна верстка М. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for monitoring the plain-strain stress condition of material
Автори англійськоюShokarev Viktor Semenovych, Shokariev Viktor Semenovych, Chaplyhin Valerii Ivanovych
Назва патенту російськоюСпособ электромагнитного контроля плоскодеформированного напряженного состояния материала
Автори російськоюШокарев Виктор Семенович, Чаплыгин Валерий Иванович
МПК / Мітки
МПК: G01N 27/72
Мітки: плоского, стану, спосіб, матеріалу, електромагнітний, контролю, напружено-деформованого
Код посилання
<a href="https://ua.patents.su/4-77558-elektromagnitnijj-sposib-kontrolyu-ploskogo-napruzheno-deformovanogo-stanu-materialu.html" target="_blank" rel="follow" title="База патентів України">Електромагнітний спосіб контролю плоского напружено-деформованого стану матеріалу</a>
Електромагнітна вимірювально-інформаційна система неруйнівного контролю параметрів напружено-деформованого стану інженерних конструкцій і споруд
Номер патенту: 75876
Опубліковано: 15.06.2006
Автори: Мальцева Яна Валеріївна, Шокарев Віктор Семенович, Чаплигін Валерій Іванович
МПК: G01N 27/90, G01M 19/00
Мітки: інженерних, споруд, вимірювально-інформаційна, стану, контролю, конструкцій, неруйнівного, електромагнітна, параметрів, напружено-деформованого, система
Формула / Реферат:
1. Електромагнітна вимірювально-інформаційна система неруйнівного контролю параметрів напружено-деформованого стану інженерних конструкцій і споруд, яка містить вимірювальні канали з електромагнітними датчиками, які складаються з первинного індуктивного перетворювача з рухомим циліндричним магнітопроводом, на якому розташовані по чотири ідентичних основних котушки індуктивності, ввімкнених випусками в основний комутатор котушок, з'єднаний...
Спосіб контролю напружено-деформованого стану масиву гірничих порід
Номер патенту: 19801
Опубліковано: 25.12.1997
Автори: Шкуратнік Владімір Лазарєвіч, Шахнова Валентина Митрофанівна, Азаров Микола Якович, Кисельов Микола Миколайович
МПК: G01V 3/08
Мітки: контролю, масиву, напружено-деформованого, гірничих, стану, порід, спосіб
Формула / Реферат:
Способ контроля напряженно-деформированного состояния массива горных пород, включающий возбуждение электрического поля в исследуемом массиве при помощи двух питающих электродов и измерение разностей потенциалов парами измерительных электродов, сравнение их с тарированными значениями параметров поля и суждение о напряженно-деформированном состоянии по результатам сравнения, отличающийся тем, что одновременно в каждой точке измерения параметров...
Зразок для дослідження напружено-деформованого стану трубопроводів з локальним стоншенням
Номер патенту: 69955
Опубліковано: 15.09.2004
Автори: Крицький Володимир Борисович, Гарф Едуард Фєофілович, Шидловський Микола Сергійович, Шугайло Олексій Петрович, Шугайло Олександр Петрович
МПК: G01N 3/00
Мітки: напружено-деформованого, зразок, трубопроводів, дослідження, локальним, стану, стоншенням
Формула / Реферат:
Зразок для дослідження напружено-деформованого стану трубопроводів з локальним стоншенням, що містить циліндричну частину з щонайменше одним локальним стоншенням стінки циліндра та приварені до торців циліндра два плоских днища, одне з яких має щонайменше два штуцери, для подачі усередину зразка робочого середовища та приєднання манометра, який відрізняється тим, що локальні стоншення в стінці циліндра виконані у вигляді вирізу, що має форму...
Пристрій для безперервного контролю напружено-деформованого стану масиву гірських порід
Номер патенту: 9448
Опубліковано: 30.09.1996
Автори: Бойко Богдан Дмитрович, Вербицький Тарас Зиновійович
МПК: G01V 1/00
Мітки: стану, пристрій, безперервного, гірських, порід, напружено-деформованого, масиву, контролю
Формула / Реферат:
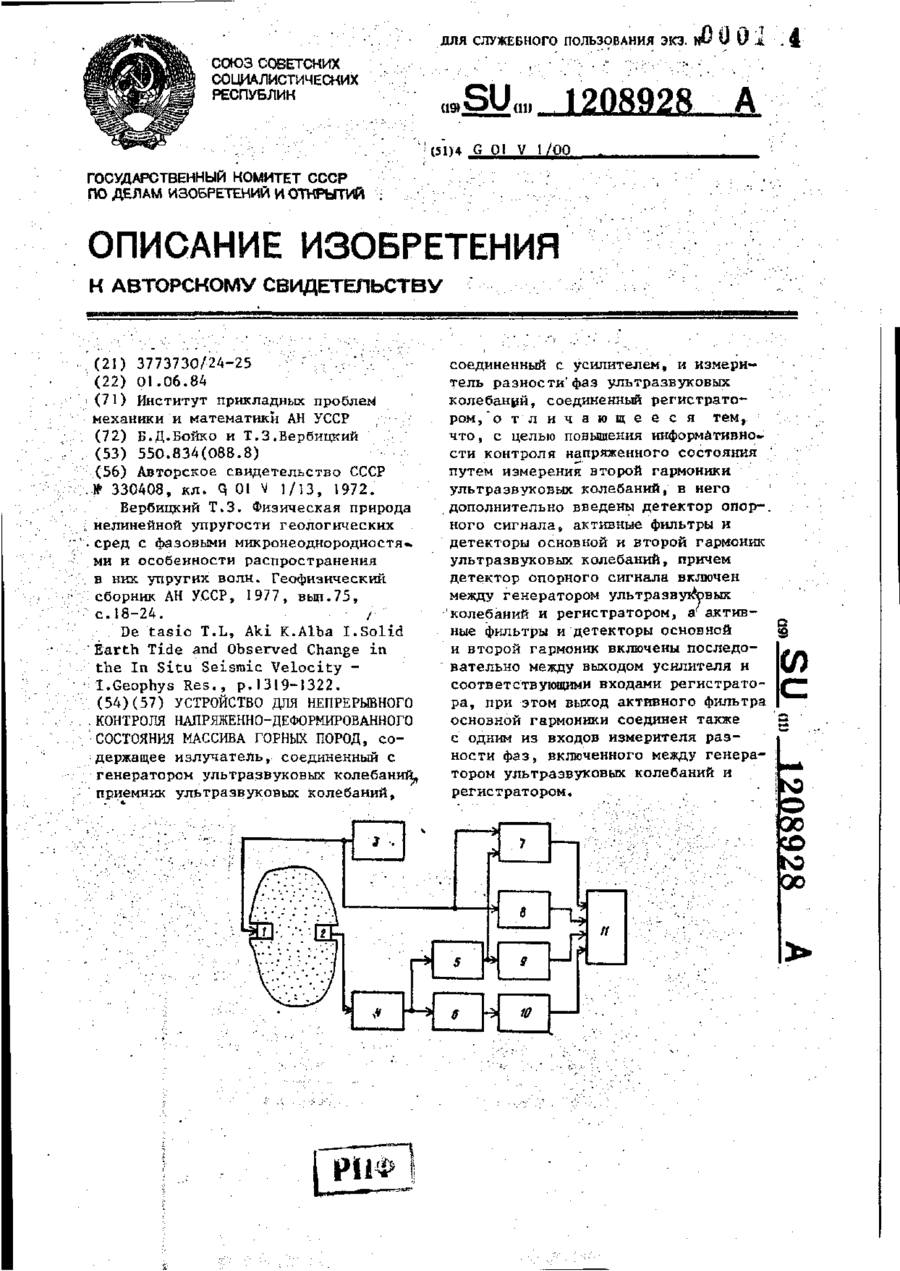
Устройство для непрерывного контроля напряженно-деформированного состояния массива горных пород, содержащее излучатель, соединенный с генератором ультразвуковых колебаний, приемник ультразвуковых колебаний, соединенный с усилителем, и измеритель разности фаз ультразвуковых колебаний, соединенный регистратором, отличающееся тем, что, с целью повышения информативности контроля напряженного состояния путем измерения второй гармоники...
Спосіб неруйнівного контролю напружено-деформівного стану деревини та деревинних листових матеріалів при сушінні
Номер патенту: 23817
Опубліковано: 16.06.1998
Автори: Соколовський Ярослав Іванович, Бехта Павло Антонович, Озарків Ігор Мирославович, Озарків Святослав Ігорович, Поберейко Богдан Петрович
МПК: G01N 21/35
Мітки: сушінні, деревинних, деревини, спосіб, листових, матеріалів, стану, неруйнівного, контролю, напружено-деформівного
Формула / Реферат:
Спосіб неруйнівного контролю напружено-деформівного стану деревини та деревинних листових матеріалів при сушінні, який полягає в тому, що деревину опромінюють плоским поляризованим пучком світла, виділяють в об'єкті (моделі) площину, паралельну пучку поляризованого світла і розташовану на певній віддалі від джерела світла, при якій квазіголовні напруження і їхня орієнтація не змінюються і по інтерференційних картинах визначають параметри...
Попередній патент: Спосіб виготовлення шпону
Наступний патент: Багаторівневий перетворювач частоти
Випадковий патент: Стабільні при зберіганні водні композиції на базі похідних n-феніл-3,4,5,6-тетрагідрофталімідів