Стабілізатор вертикального напрямку візирної лінії

Формула / Реферат
1. Стабілізатор вертикального напрямку візирної лінії оптичного виска, що містить корпус з кришкою, жорстко зв'язаний з оптичною системою зорової труби, ємність, частково заповнену оптично прозорою рідиною і підвішену до кришки корпусу на діагонально-перехресних нитках над об'єктивом зорової труби, який відрізняється тим, що точки кріплення ниток підвіски до кришки корпусу містяться на повзунках, установлених на осях обертання, які кінематично зв’язані з електроприводом, що керується блоком обробки інформації, на вході якого встановлений датчик температури, що контактує з налитою в ємність рідиною.
2. Стабілізатор за п. 1, який відрізняється тим, що ємність частково заповнена оптично прозорою рідиною і підвішена до кришки корпусу на діагонально-перехресних нитках над об'єктивом зорової труби, оснащена вантажем у вигляді металевого кільця, що встановлений на термічно чуттєвій пружині, закріпленій в основі ємності з внутрішнього боку.
3. Стабілізатор за п. 1, який відрізняється тим, що точки кріплення ниток до кришки корпусу і до ємності знаходяться на біметалічних пластинах-пружинах, напрямок вигину яких, при впливі на них температури навколишнього середовища, протилежний один до одного.
Текст
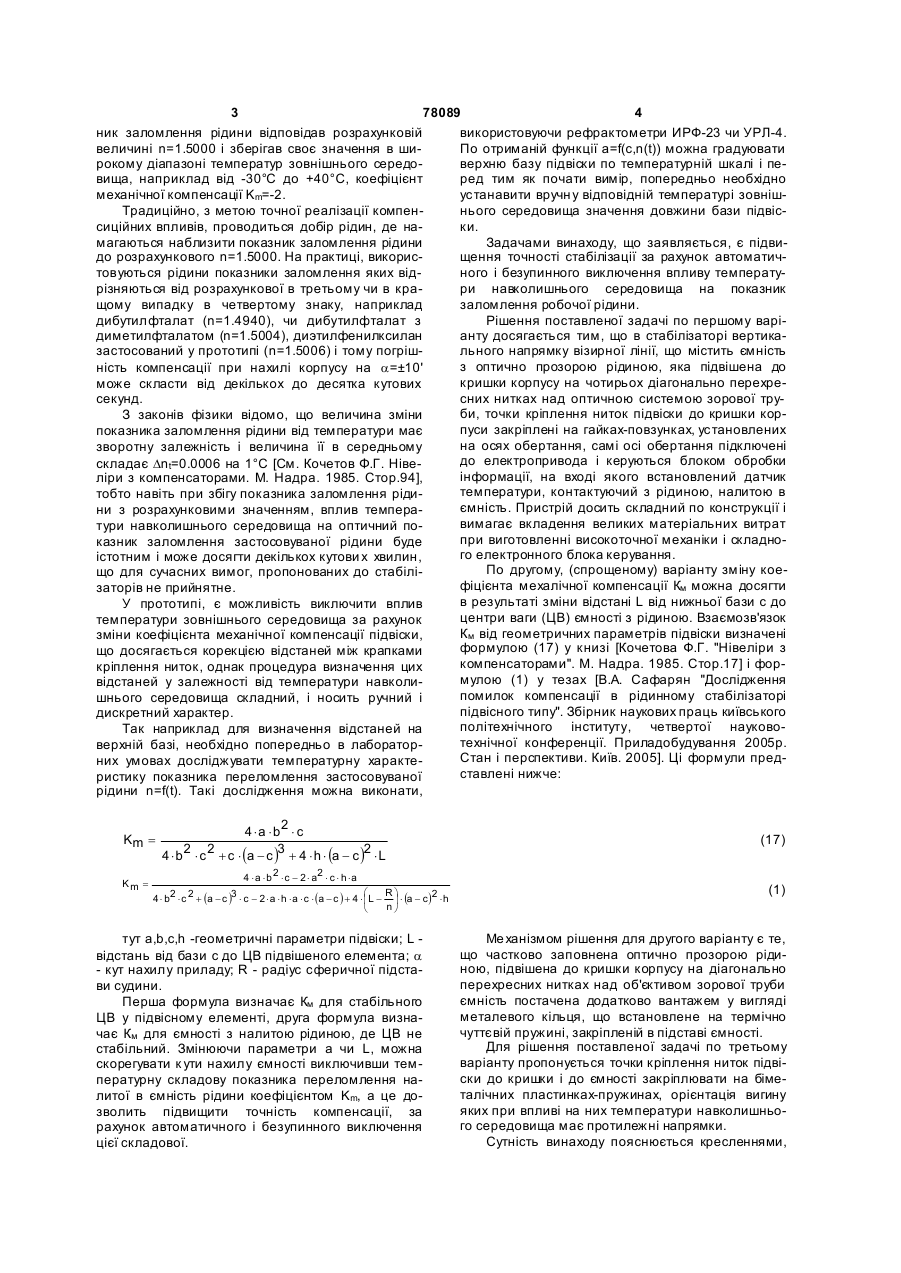
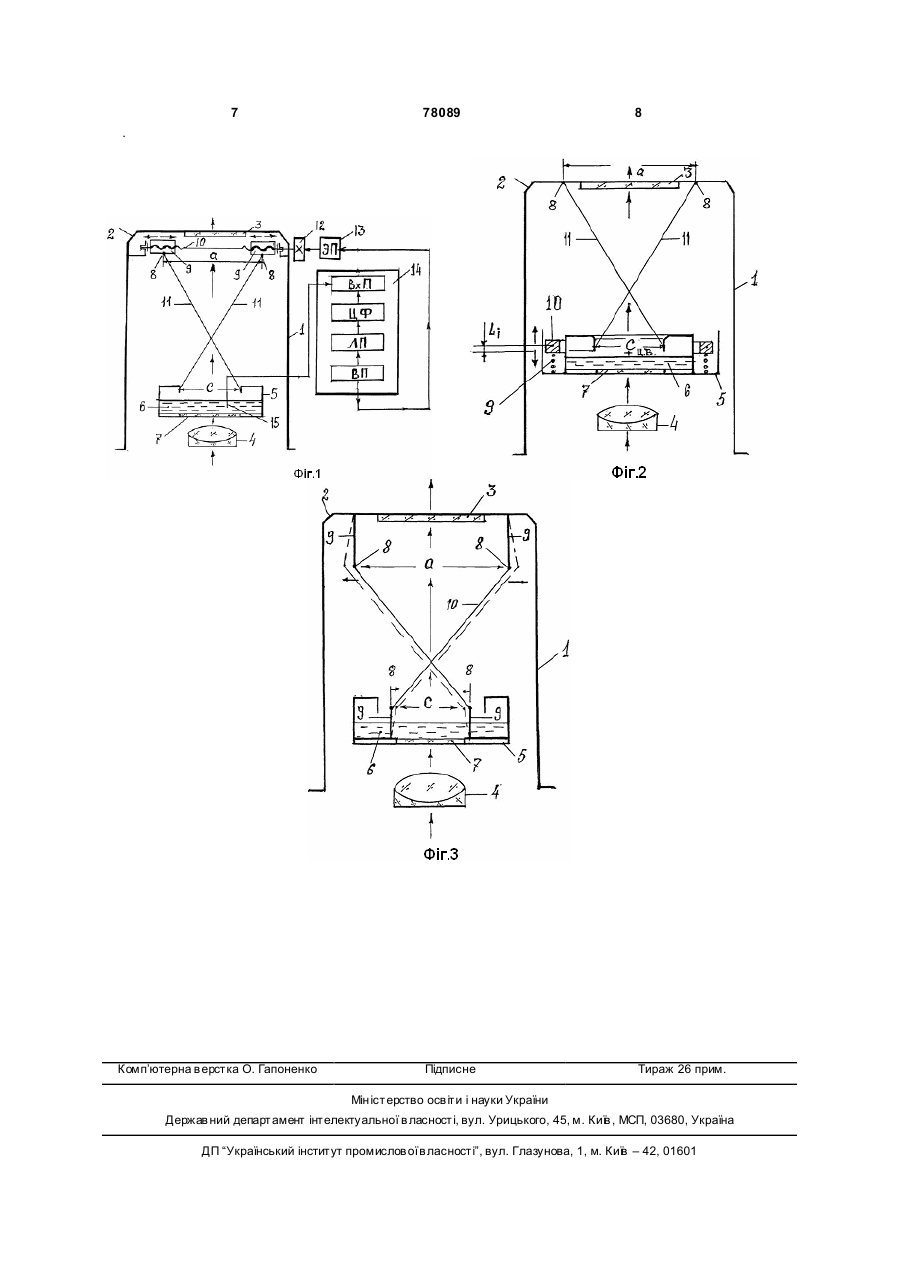
1. Стабілізатор вертикального напрямку візирної лінії оптичного виска, що містить корпус з кришкою, жорстко зв'язаний з оптичною системою зорової труби, ємність, частково заповнену оптично прозорою рідиною і підвішену до кришки корпусу на діагонально-перехресних нитках над об'єктивом зорової труби, який відрізняється тим, що точки кріплення ниток підвіски до кришки корпусу містяться на повзунках, установлених на осях 3 78089 4 ник заломлення рідини відповідав розрахунковій використовуючи рефрактометри ИРФ-23 чи УРЛ-4. величині n=1.5000 і зберігав своє значення в шиПо отриманій функції a=f(c,n(t)) можна градуювати рокому діапазоні температур зовнішнього середоверхню базу підвіски по температурній шкалі і певища, наприклад від -30°С до +40°С, коефіцієнт ред тим як почати вимір, попередньо необхідно механічної компенсації Km=-2. устанавити вручн у відповідній температурі зовнішТрадиційно, з метою точної реалізації компеннього середовища значення довжини бази підвіссиційних впливів, проводиться добір рідин, де наки. магаються наблизити показник заломлення рідини Задачами винаходу, що заявляється, є підвидо розрахункового n=1.5000. На практиці, викорисщення точності стабілізації за рахунок автоматичтовуються рідини показники заломлення яких відного і безупинного виключення впливу температурізняються від розрахункової в третьому чи в крари навколишнього середовища на показник щому випадку в четвертому знаку, наприклад заломлення робочої рідини. дибутилфталат (n=1.4940), чи дибутилфталат з Рішення поставленої задачі по першому варідиметилфталатом (n=1.5004), диэтилфенилксилан анту досягається тим, що в стабілізаторі вертиказастосований у прототипі (n=1.5006) і тому погрішльного напрямку візирної лінії, що містить ємність з оптично прозорою рідиною, яка підвішена до ність компенсації при нахилі корпусу на a=±10' кришки корпусу на чотирьох діагонально перехреможе скласти від декількох до десятка кутових секунд. сних нитках над оптичною системою зорової труби, точки кріплення ниток підвіски до кришки корЗ законів фізики відомо, що величина зміни пуси закріплені на гайках-повзунках, установлених показника заломлення рідини від температури має на осях обертання, самі осі обертання підключені зворотну залежність і величина її в середньому до електропривода і керуються блоком обробки складає Dnt=0.0006 на 1°С [См. Кочетов Φ.Γ. Нівеінформації, на вході якого встановлений датчик ліри з компенсаторами. Μ. Надра. 1985. Стор.94], температури, контактуючий з рідиною, налитою в тобто навіть при збігу показника заломлення рідиємність. Пристрій досить складний по конструкції і ни з розрахунковими значенням, вплив темперавимагає вкладення великих матеріальних витрат тури навколишнього середовища на оптичний попри виготовленні високоточної механіки і складноказник заломлення застосовуваної рідини буде го електронного блока керування. істотним і може досягти декількох кутови х хвилин, По другому, (спрощеному) варіанту зміну коещо для сучасних вимог, пропонованих до стабіліфіцієнта мехалічної компенсації Км можна досягти заторів не прийнятне. в результаті зміни відстані L від нижньої бази с до У прототипі, є можливість виключити вплив центри ваги (ЦВ) ємності з рідиною. Взаємозв'язок температури зовнішнього середовища за рахунок Км від геометричних параметрів підвіски визначені зміни коефіцієнта механічної компенсації підвіски, формулою (17) у книзі [Кочетова Ф.Г. "Нівеліри з що досягається корекцією відстаней між крапками компенсаторами". Μ. Надра. 1985. Стор.17] і форкріплення ниток, однак процедура визначення цих мулою (1) у тезах [В.А. Сафарян "Дослідження відстаней у залежності від температури навколипомилок компенсації в рідинному стабілізаторі шнього середовища складний, і носить ручний і підвісного типу". Збірник наукових праць київського дискретний характер. політехнічного інституту, четвертої науковоТак наприклад для визначення відстаней на технічної конференції. Приладобудування 2005р. верхній базі, необхідно попередньо в лабораторСтан і перспективи. Київ. 2005]. Ці формули предних умовах досліджувати температурну характеставлені нижче: ристику показника переломлення застосовуваної рідини n=f(t). Такі дослідження можна виконати, Km = Km = 4 × a × b2 × c 4 × b2 × c 2 + c × (a - c )3 + 4 × h × (a - c )2 × L 2 2 4 ×a ×b ×c - 2× a × c × h×a æ Rö 4 × b2 × c 2 + (a - c )3 × c - 2 × a × h × a × c × (a - c ) + 4 × ç L - ÷ × (a - c )2 × h nø è тут a,b,c,h -геометричні параметри підвіски; L відстань від бази с до ЦВ підвішеного елемента; a - кут нахилу приладу; R - радіус сферичної підстави судини. Перша формула визначає Км для стабільного ЦВ у підвісному елементі, друга формула визначає Км для ємності з налитою рідиною, де ЦВ не стабільний. Змінюючи параметри а чи L, можна скорегувати к ути нахилу ємності виключивши температурну складову показника переломлення налитої в ємність рідини коефіцієнтом Km, а це дозволить підвищити точність компенсації, за рахунок автоматичного і безупинного виключення цієї складової. (17) (1) Ме ханізмом рішення для другого варіанту є те, що частково заповнена оптично прозорою рідиною, підвішена до кришки корпусу на діагонально перехресних нитках над об'єктивом зорової труби ємність постачена додатково вантажем у вигляді металевого кільця, що встановлене на термічно чуттєвій пружині, закріпленій в підставі ємності. Для рішення поставленої задачі по третьому варіанту пропонується точки кріплення ниток підвіски до кришки і до ємності закріплювати на біметалічних пластинках-пружинах, орієнтація вигину яких при впливі на них температури навколишнього середовища має протилежні напрямки. Сутність винаходу пояснюється кресленнями, 5 78089 6 де на Фіг.1 показаний перетин стабілізатора верності, контактує з рідиною 6. По другому (спрощетикального напрямку візирної лінії з блоком керуному) варіанту (див. Фіг.2) ємність 5 постачена вання. На Фіг.2 перетин стабілізатора з термічно термічно чуттєвою пружиною 9 і вантажем у вичуттєвою пружиною в підставі ємності. На Фіг.3 гляді кільця 10. Один кінець пружини закріплений у перетин стабілізатора з застосуванням біметалічпідставі судини 5, а інший - з кільцем 10. По трених пластин у точках кріплення ниток. тьому варіанту (див Фіг.3) стабілізатор постачений Стабілізатор вертикального напрямку візирної у точках кріплення ниток біметалічними пластиналінії може бути реалізований у такий спосіб. Корми 9, напрямок вигину яких при впливі на них темпус приладу і підвісна ємність виконані з алюмінію, ператури навколишнього середовища протилежні нитки підвісу сталеві товщиною 0,03мм. Викорисодин одному. Протилежна орієнтація біметалічних товувана рідина може мати показник переломленпластин дозволяє підвищити чутливість системи ня від 1,3 до 1,6, наприклад дибутилфталат, що підвіски при зміні температури. має хімічну формулу С 16Н22О4 , показник заломлеСтабілізатор вертикального напрямку візирної ния якої n=1,4940 і в'язкість при 20°С 16,2сп. Мелінії оптичного виска працює в такий спосіб. Попеханічна рухли ва частина може бути виконана у редньо перед вимірами дають можливість термовигляді гвинтового механізму, що складається з статувати температуру робочої рідини з темперадвох гвинтів і чотирьох повзунків, на який кріптурою навколишнього середовища. Включають ляться нитки підвісу. Самі гвинти мають разносторежим автоматичного настроювання компенсаторонню різьбову нарізку і при обертанні їх в одну ра, де вимірювальний блок 14 порівнює значення сторону повзунки розходяться, а при обертанні їх у температури Твх. вхідної величини з уставкою в протилежну - сходяться. Обертання гвинтів привоелектронному блоці (наприклад Туст.=20°С). Логічдиться електроприводом через зубцювату систему ний пристрій прораховує і видає сигнал (пропорзв'язку. Точки кріплення ниток, які містяться на ційно силі струму) керування на вихідній пристрій, повзунках, можуть також переміщатися по висоті, а з вихідного пристрою нa електропривод обердля горизонтуваня ємності з рідиною. Блок обробтання 13. Якщо Твх. Т уст. вал елекри (ДТ), складається з вхідного пристрою (ВхП), тропривода обертається в протилежну сторону, цифрового фільтра (ЦФ), логічного пристрою (ЛΠ) і здійснюючи тим самим двохпозіцийну роботу ЭП. вихідного пристрою (ВП). Вхідний пристрій приКонтроль обертання ЭП за часом може здійснювазначений для підключення вимірювального датчитися пропорційно силі струму. Оптична корекція ка температур. Цифровий фільтр призначений для променя (у всіх трьох варіантах) здійснюється в усунення перешкод, згладжування сигналів, що такий спосіб. При нахилі корпусу пристрою на ненадходять, захищає вимірювальний тракт від сивеликий кут, ємність з рідиною нахиляється в прольних перешкод. Логічний пристрій формує сигнатилежну сторону. Між відкритою поверхнею рідини ли керування, що через вихідний пристрій (реле, 6 у ємності і плоскою склянкою поверхнею підстатранзисторні ключі, оптосимистор і т.п) подається ви 7 ємності утвориться рідинний клин, що і відхина електропривід (ЭП). ЛП може працювати й у ляє напрямок візирного променя в протилежний режимі компаратора (пристрою порівняння) здійсбік, у результаті чого відбувається самоустановка нюючий двухпозиційне регулювання щодо умовнопроменя в попередньому положенні і якщо це пого нуля. Як датчик температур можуть бути виколоження раніше було виставлене прямовисно, то ристані термоперетворювачі опору, чи термопари, візирний промінь збереже цей напрямок. Корекція наприклад типу TCM чи ТХА з діапазоном темпекоефіцієнта механічної компенсації по другому ратур від -50°С до +50°С і характеристикою крутоваріанту здійснюється в такий спосіб. Під впливом сті W100=1,426. Як термічно чуттєві пружини і пластемператури навколишнього середовища термічно тин можуть служити біметалічні пружини-пластини чуттєва пружина 9 стискується чи розтискається, різних конструкцій [Див наприклад довідник за резмінюючи положення металевого вантажу, викодакцією Д.И. Агейкина. Вимір в промисловості. наного у вигляді кільця 10 щодо нижньої бази с Москва. Ме талургия.1990. стор.301]. Зсув вільного підвіски. Положення кільця щодо бази с можна кінця пружини (L залежить від коефіцієнта лінійнорегулювати пр ужністю пружини, кількістю її витків, го розширення матеріалу, кількості витків, довжини вагою самого кільця. Підбираючи ці параметри, витка чи пластини, площі перетину пружини, кільможна привести систему підвіски до такого рівня, кості шарів у перетині пластин). коли зміна коефіцієнта механічної компенсації DKL, Стабілізатор складається з корпусу 1, кришки буде адекватно впливати на величину зміни Dnt. 2 з вихідним вікном у вигляді плоскопаралельної По третьому варіанту зміна Km відбувається в рескляної пластини 3, оптичної системи 4, ємності 5, зультаті впливу температури зовнішнього середооптично прозорої рідини 6, вхідний отвір ємності вища на біметалічні пластини 9, у результаті якого закритий плоскопаралельною скляною пластиною відбувається їхній вигин, що приводить до зміни 7, точки кріплення 8 установлені на повзунках 9, геометричних параметрів верхньої а і нижньої с самі повзуни встановлені на гвинтах 10, що закрібази підвіски. плені в кришці корпусу 2, мають можливість переТочність установки променя підвищується міщатися уздовж бази підвісу. Система підвісу приблизно в 5 разів у першому варіанті й у 3-4 ємності виконана на чотирьох перехресних нитках рази в другому і третьому. Збільшення точності 11. Гвинти 10, через систему зубцюватого зв'язку стабілізації, дозволить розширити межі компенса12 з'єднані з електроприводом 13, що у свою чергу ції і довести їх від 10 до 30 кутових хвилин нахилу з'єднаний із блоком обробки інформації і керуванприладу ня 14. Датчик температури 15 встановлений у єм 7 78089 8 Підписне Тираж 26 прим. . Комп’ютерна в ерстка О. Гапоненко Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for stabilizing the vertical direction of the survey line
Автори англійськоюSafarian Valerii Amaiakovych
Назва патенту російськоюУстройство для стабилизации вертикального направления визирной линии
Автори російськоюСафарян Валерий Амаякович
МПК / Мітки
МПК: G01C 9/18
Мітки: лінії, вертикального, візирної, напрямку, стабілізатор
Код посилання
<a href="https://ua.patents.su/4-78089-stabilizator-vertikalnogo-napryamku-vizirno-lini.html" target="_blank" rel="follow" title="База патентів України">Стабілізатор вертикального напрямку візирної лінії</a>
Стабілізатор вертикального напрямку візирної лінії
Номер патенту: 75162
Опубліковано: 15.03.2006
Автор: Сафарян Валерій Амаякович
МПК: G01C 9/18
Мітки: напрямку, стабілізатор, лінії, вертикального, візирної
Формула / Реферат:
1. Стабілізатор вертикального напрямку візирної лінії, що містить корпус з кришкою, жорстко зв'язаний з оптичною системою зорової труби, ємність, частково заповнену оптично прозорою рідиною і підвішену до кришки корпуса на чотирьох діагонально перехресних нитках над об'єктивом зорової труби, який відрізняється тим, що внутрішня поверхня ємності має форму сферичного пояса, вхідний отвір якого закрито скляною пластиною, точки кріплення ниток,...
Пристрій для задання вертикального напрямку
Номер патенту: 19006
Опубліковано: 25.12.1997
Автори: Здещиц Валерій Максимович, Сидоренко Віктор Дмитрович
МПК: G01C 15/10
Мітки: вертикального, пристрій, напрямку, задання
Формула / Реферат:
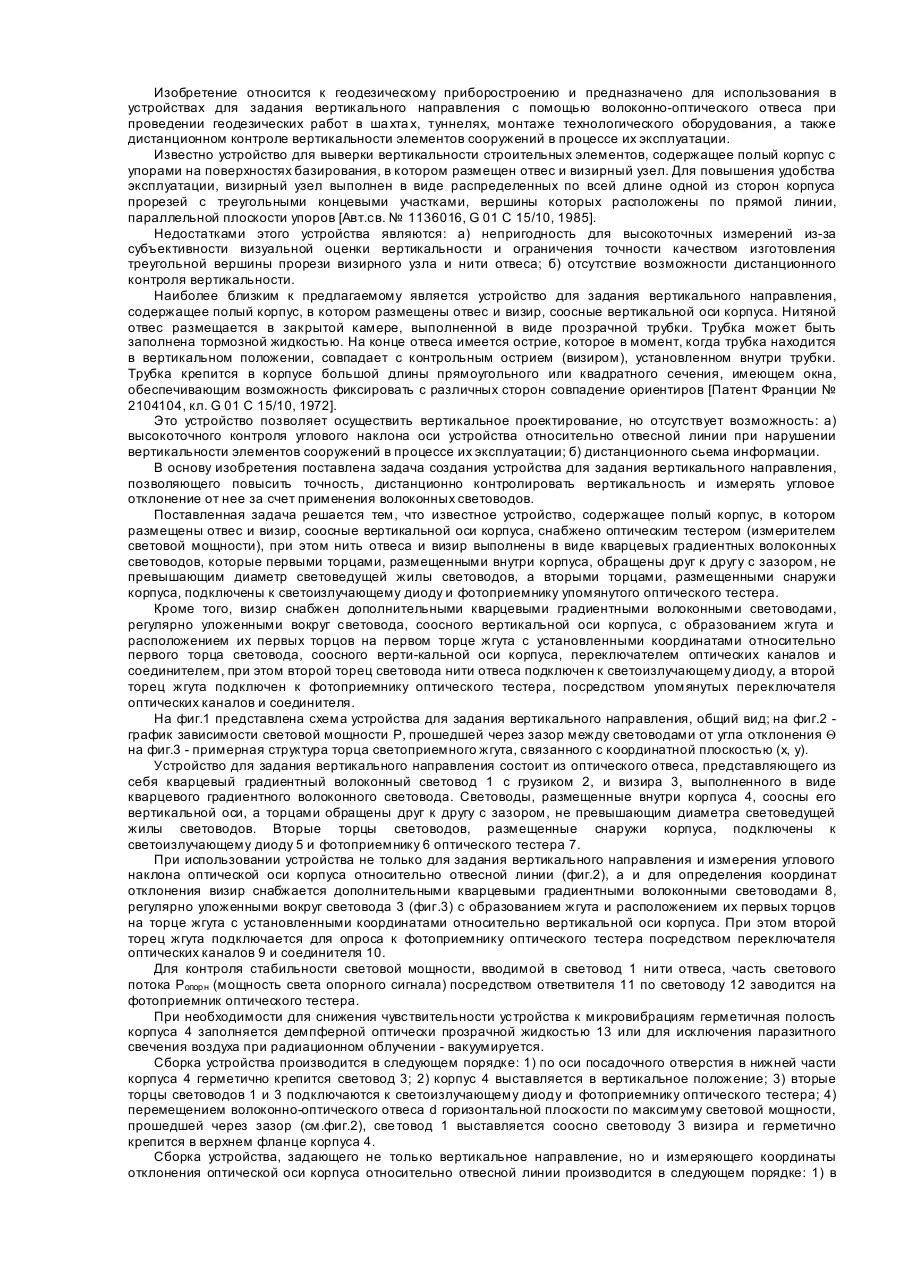
1. Устройство для задания вертикального направления, содержащее полый корпус, в котором размещены отвес и визир, соосные вертикальной оси корпуса, отличающееся тем, что оно снабжено оптическим тестером, при этом нить отвеса и визир выполнены в виде кварцевых градиентных волоконных световодов, которые первыми торцами, размещенными внутри корпуса, обращены друг к другу с зазором, не превышающим диаметр световедущей жилы световодов, а вторыми...
Пристрій для приведення візирної осі оптичного приладу у вертикальне положення
Номер патенту: 3123
Опубліковано: 15.10.2004
Автор: Сафарян Валерій Амаякович
МПК: G01C 9/18
Мітки: оптичного, вертикальне, приладу, візирної, осі, положення, приведення, пристрій
Формула / Реферат:
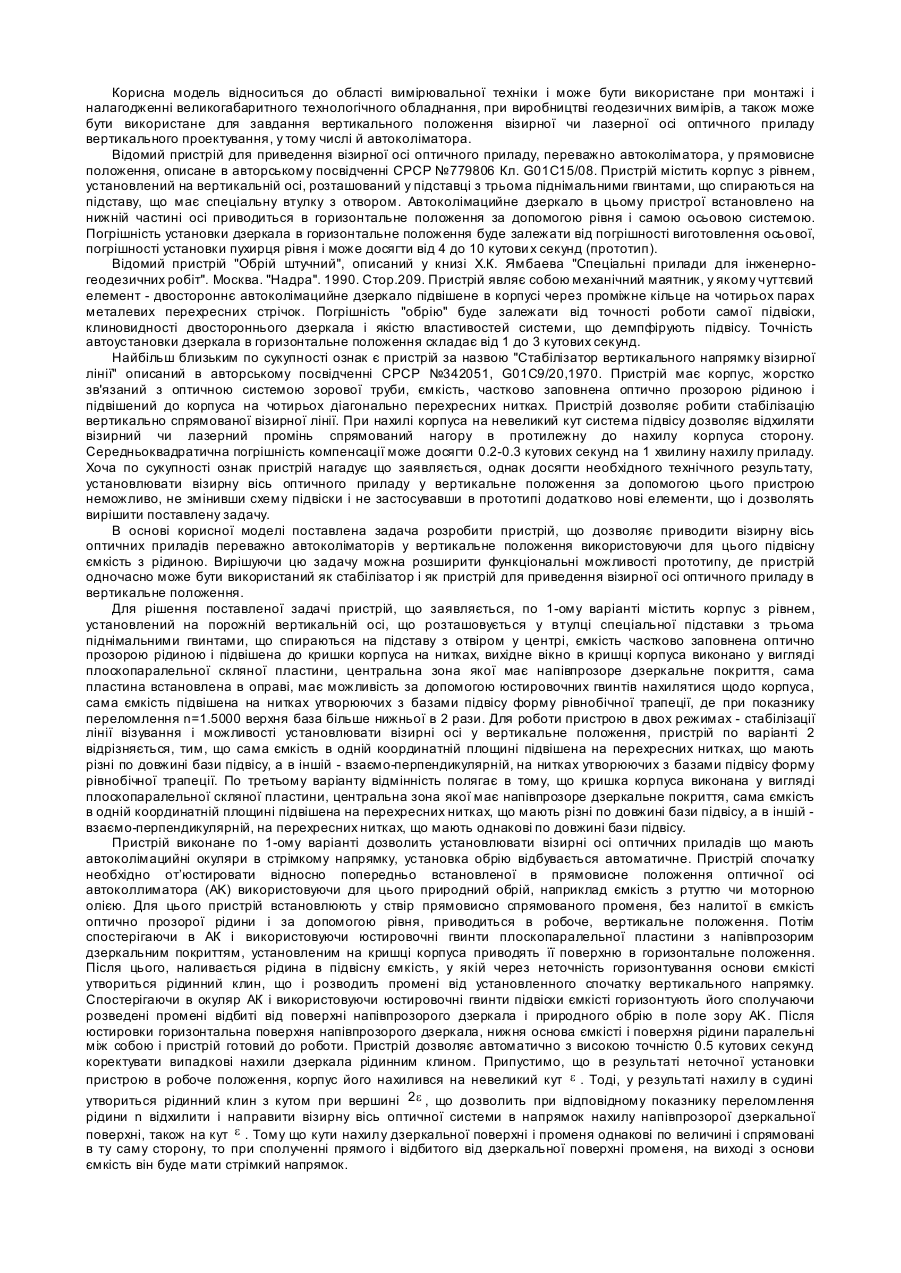
1. Пристрій для приведення візирної осі оптичного приладу у вертикальне положення, що містить корпус з рівнем, встановлений на порожнистій вертикальній осі, розташованій на втулці з отвором, закріплений у підставці з трьома піднімальними гвинтами, які спираються на основу з отвором у центрі, який відрізняється тим, що ємкість частково заповнена оптично прозорою рідиною і підвішена до корпусу на нитках, вихідне вікно в кришці корпуса виконано...
Спосіб визначення відстані від вертикальної осі симетрії рейки до лінії дії вертикального навантаження
Номер патенту: 63129
Опубліковано: 15.01.2004
Автори: Гусарова Діна Петрівна, Тасанг Ерік Хельмутович, Горбунов Микола Іванович
МПК: E01B 35/00, G01R 17/00
Мітки: дії, відстані, лінії, визначення, навантаження, симетрії, вертикального, рейки, осі, спосіб, вертикальної
Формула / Реферат:
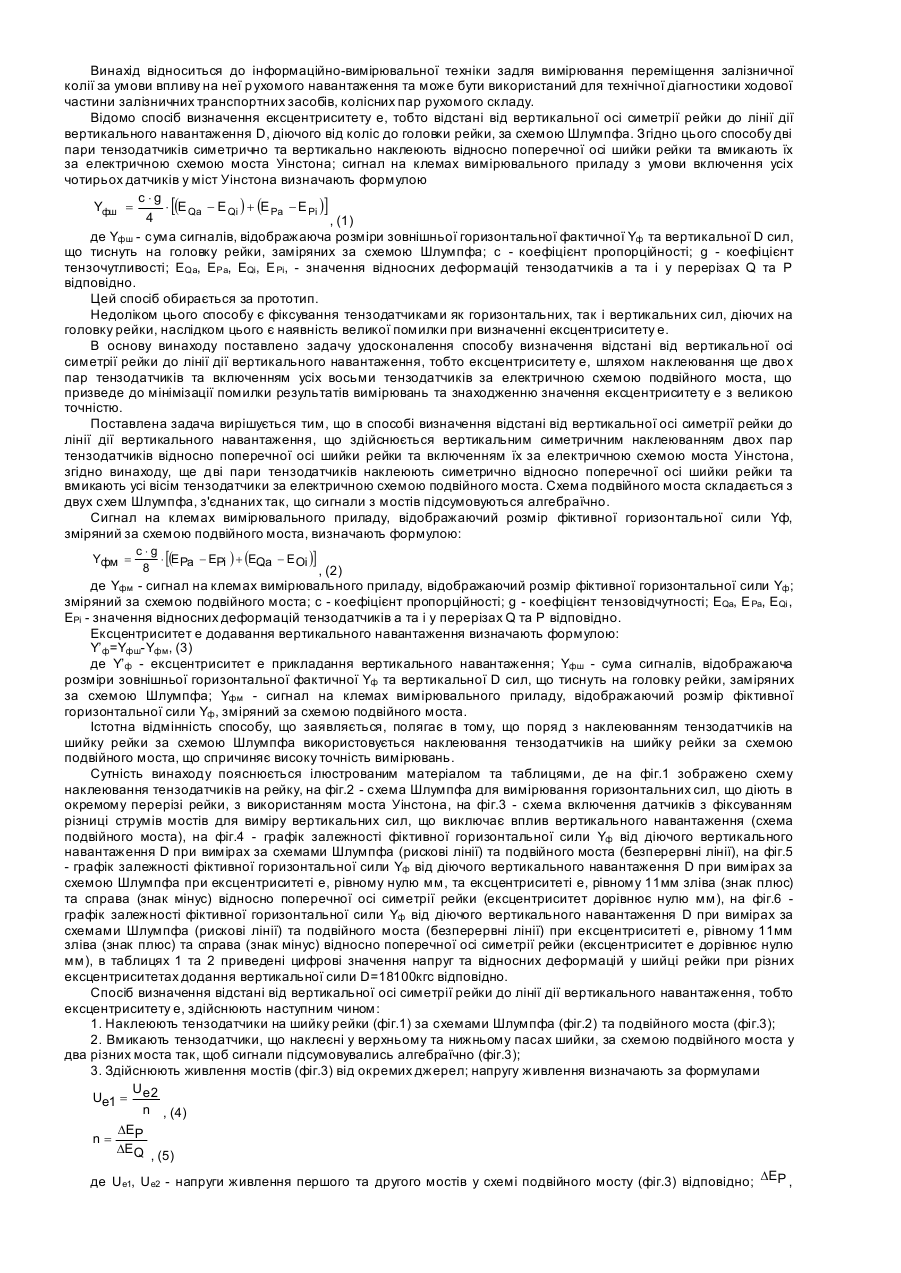
Спосіб визначення відстані від вертикальної осі симетрії рейки до лінії дії вертикального навантаження, у якому дві пари тензодатчиків симетрично та вертикально наклеюють відносно поперечної осі шийки рейки та вмикають їх за електричною схемою моста Уінстона, який відрізняється тим, що ще дві пари тензодатчиків наклеюють у верхньому та нижньому пасах шийки рейки, вмикають усі вісім тензодатчиків за електричною схемою подвійного моста,...
Пристрій для перевірки нівелірів і приладів вертикального проектування
Номер патенту: 14510
Опубліковано: 15.05.2006
Автор: Сафарян Валерій Амаякович
МПК: G01C 5/00
Мітки: перевірки, приладів, проектування, нівелірів, пристрій, вертикального
Формула / Реферат:
1. Пристрій для перевірки нівелірів і приладів вертикального проектування, що містить підставку з установленим на неї автоколіматором, ємністю з рідиною, який відрізняється тим, що підставка виконана з наскрізним отвором, об'єктив автоколіматора оснащений втулкою, яка має підшипник обертання, що дозволяє їй обертатися у площині, перпендикулярній випромінюванню автоколіматора, у втулці на підшипнику встановлена пентапризма, що має можливість...
Попередній патент: Каталітичний нейтралізатор
Наступний патент: Тупикова паливна система двигуна транспортного засобу з ділянкою для вимірювання витрати палива
Випадковий патент: Спосіб вибору рівня ампутації при гнійно-некротичній формі ускладнень цукрового діабету