Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння
Номер патенту: 79874
Опубліковано: 25.07.2007
Автори: Подчашинський Юрій Олександрович, Безвесільна Олена Миколаївна
Формула / Реферат
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння, що містить гіроскопічний гравіметр (1), систему визначення навігаційних параметрів (2) та вимірювач висоти (3), які підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), яка відрізняється тим, що гіроскопічний гравіметр (1) містить два триступеневі гіроскопи (8, 9), ротори яких виконані такими, що обертаються в протилежні боки, а їх центри мас зміщені на однакову відстань у один бік вздовж осей обертання, при цьому гіроскопічний гравіметр (1) встановлений на двовісній платформі (5), осі якої забезпечені ідентичними двигунами (6, 7), причому вихід гіроскопічного гравіметра (1) по першій осі чутливості підключений до входу БЦОМ (4) та до входу двигуна (6), що керує кутовим положенням двовісної платформи (5) по другій осі чутливості гіроскопічного гравіметра (1), а вихід гіроскопічного гравіметра (1) по другій осі чутливості підключений до входу БЦОМ (4) та до входу двигуна (7), що керує кутовим положенням двовісної платформи (5) по першій осі чутливості гіроскопічного гравіметра (1).
Текст
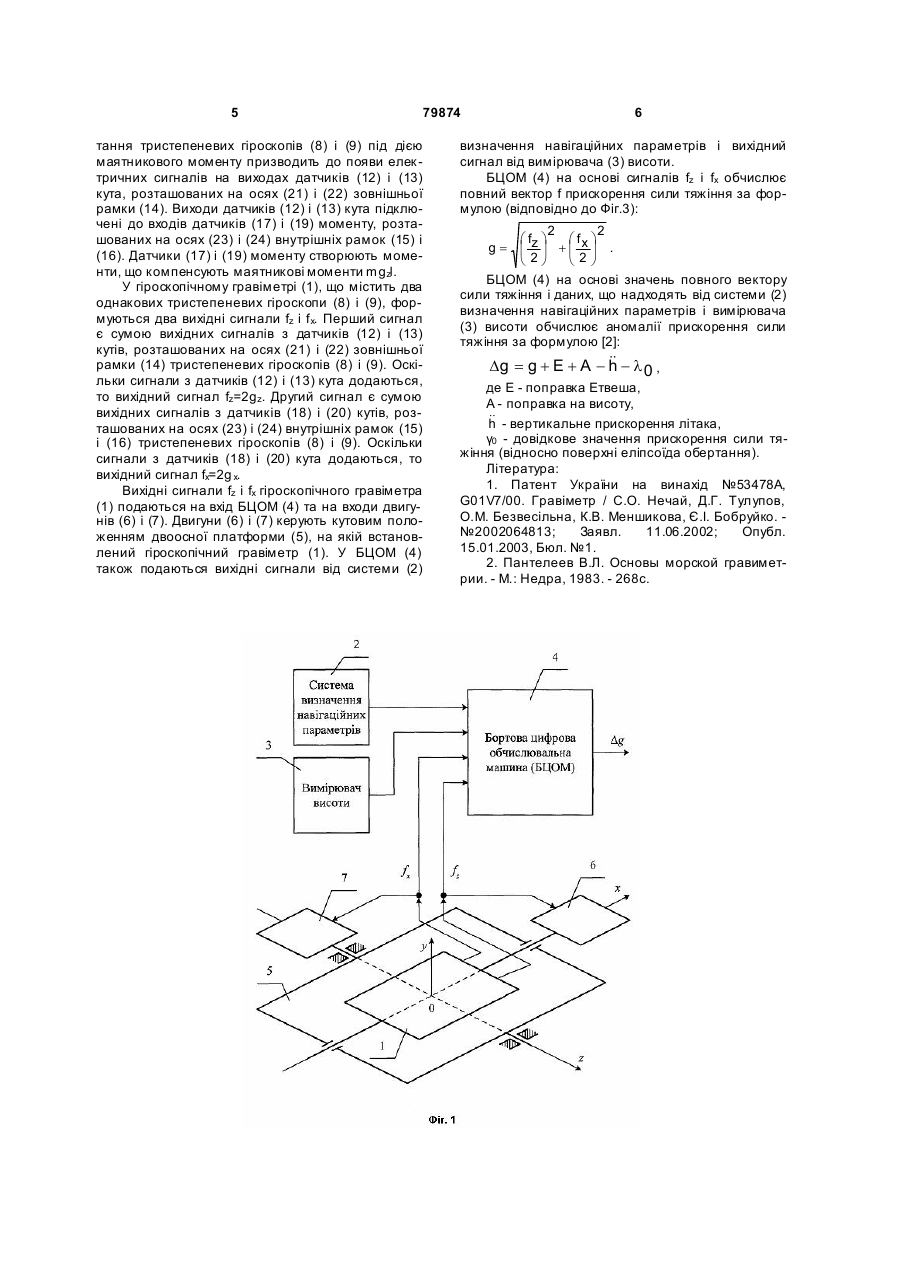
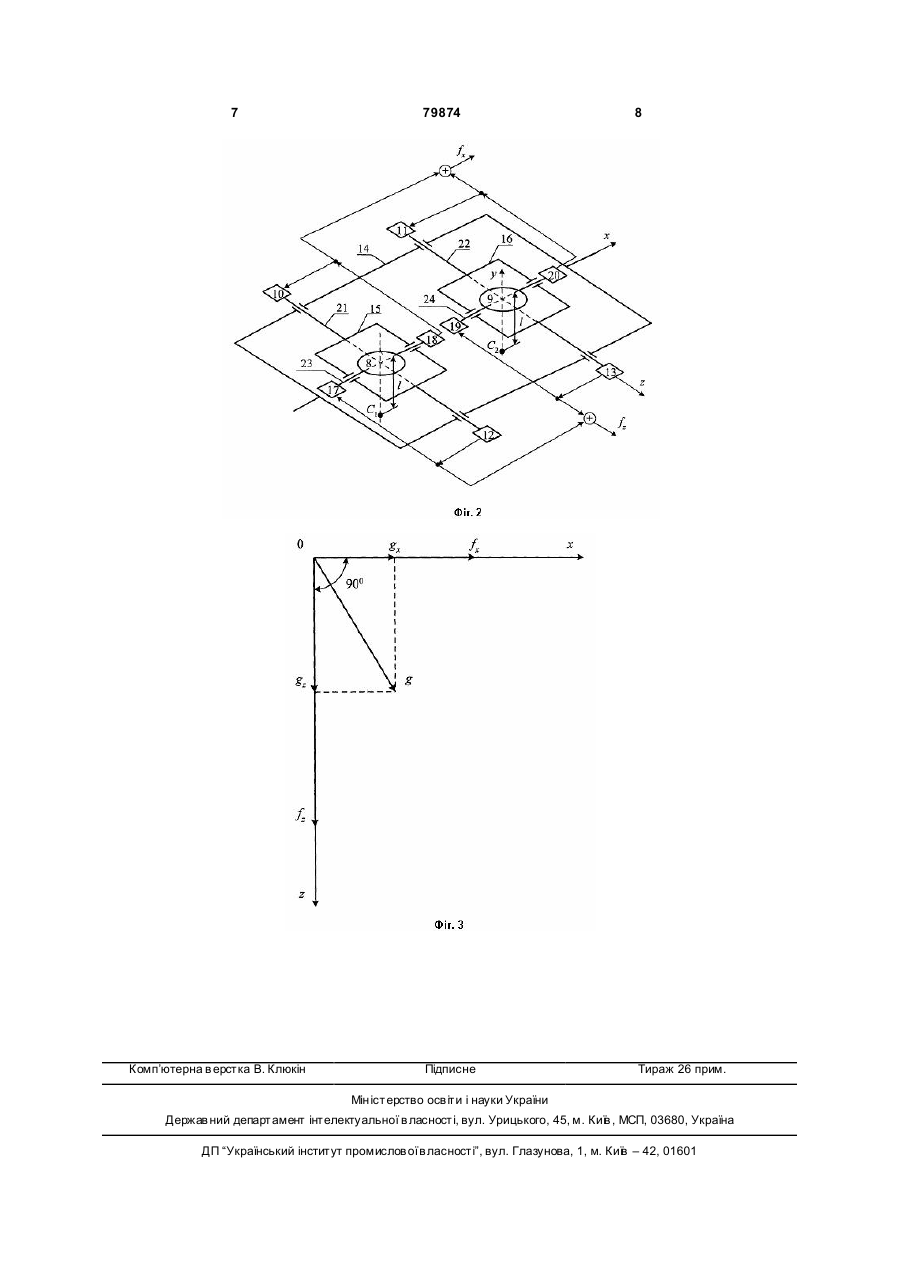
Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння, що містить гіроскопічний гравіметр (1), систему визначення навігаційних параметрів (2) та вимірювач C2 1 3 79874 мас зміщені на однакову відстань у один бік вздовж осей обертання, при цьому гіроскопічний гравіметр (1) встановлений на двоосній платформі (5), осі якої забезпечені ідентичними двигунами (6, 7), причому вихід гіроскопічного гравіметра (1) по першій осі чутливості підключений до входу БЦОМ (4) та до входу двигуна (6), що керує кутовим положенням двоосної платформи (5) по другій осі чутливості гіроскопічного гравіметра (1), а вихід гіроскопічного гравіметра (1) по другій осі чутливості підключений до входу БЦ ОМ (4) та до входу двигуна (7), що керує кутовим положенням двоосної платформи (5) по першій осі чутливості гіроскопічного гравіметра (1). Підвищення точності вимірювань в авіаційній гравіметричній системі-винаході забезпечується за рахунок того, що гіроскопічний гравіметр містить два тристепеневі гіроскопи і вимірює дві проекції повного вектора прискорення сили тяжіння на осі Ох і Oz. Ці проекції у вигляді двох сигналів надходять у БЦОМ з виходів гіроскопічного гравіметра. БЦОМ на основі значень цих сигналів обчислює повний вектор прискорення сили тяжіння і визначає аномалії прискорення сили тяжіння. Таким чином, в авіаційній гравіметричній системі-винаході забезпечується підвищення точності вимірювань аномалій прискорення сили тяжіння. Суть винаходу пояснюється кресленнями. Перелік креслень: Фіг.1 - структурна схема авіаційної гравіметричної системи для вимірювань аномалій прискорення сили тяжіння; Фіг.2 - стр уктурна схема гіроскопічного гравіметра; Фіг.3 - схема обчислення повного вектору прискорення сили тяжіння. Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння (Фіг.1) містить гіроскопічний гравіметр (1), систему (2) визначення навігаційних параметрів та вимірювач (3) висоти, які підключені до бортової цифрової обчислювальної машини (БЦОМ) (4), а також двоосну платформу (5), осі якої забезпечені ідентичними двигунами (6, 7). Гіроскопічний гравіметр (1) містить два тристепеневі гіроскопи (8, 9), ротори яких виконані таким чином, що обертаються в протилежні боки, а їх центри мас С 1 і С2 зміщені на однакову відстань l у один бік вздовж осей обертання. Тристепеневий гіроскоп (8) розташований у внутрішній рамці (15) та зовнішній рамці (14). На осі (23) внутрішньої рамки (15) розташований датчик (18) кута. До виходу датчика (18) кута підключений датчик (10) моменту, розташований на осі (21) зовнішньої рамки (14). На осі (21) зовнішньої рамки (14) розташований датчик (12) кута. До виходу датчика (12) кута підключено датчик (17) моменту, розташований на осі (23) внутрішньої рамки (15). Тристепеневий гіроскоп (9) розташований у внутрішній рамці (16) та зовнішній рамці (14) . На осі (24) внутрішньої рамки (16) розташований датчик (20) кута. До виходу датчика (20) кута підключений датчик (11) моменту, розташований на осі (22) зовнішньої рамки (14) . На осі (22) зовнішньої 4 рамки (14) розташований датчик (13) кута. До виходу датчика (13) кута підключено датчик (19) моменту, розташований на осі (24) внутрішньої рамки (16). В гіроскопічному гравіметрі (1) формуються два вихідних сигнали fz та f x, що представляють собою проекції повного вектор прискорення сили тяжіння на першу і другу осі чутливості гіроскопічного гравіметра (1). Перша вісь чутливості гіроскопічного гравіметра (1) (вісь Oz) співпадає з напрямком осей (21) і (22) зовнішньої рамки (14) тристепеневих гіроскопів (8) і (9). Друга вісь чутливості гіроскопічного гравіметра (1) (вісь Ох) співпадає з напрямком осей (23) і (24) внутрішніх рамок (15) і (16) тристепеневих гіроскопів (8) і (9). Перший сигнал є сумою ви хідних сигналів з датчиків (12) і (13) кутів, розташованих на осях (21) і (22) зовнішньої рамки (14) тристепеневих гіроскопів (8) і (9). Другий сигнал є сумою вихідних сигналів з датчиків (18) і (20) кутів, розташованих на осях (23) і (24) внутрішніх рамок (15) і (16) тристепеневих гіроскопів (8) і (9). Гіроскопічний гравіметр (1) встановлений на двоосній платформі (5), осі якої забезпечені ідентичними двигунами (6, 7). Вихід гіроскопічного гравіметра. (1) по першій осі чутливості (сигнал fz) підключений до входу БЦОМ (4) та до входу двигуна (6), що керує кутовим положенням двоосної платформи (5) по другій осі чутливості гіроскопічного гравіметра (1). Вихід гіроскопічного гравіметра (1) по другій осі чутливості (сигнал fx) підключений до входу БЦОМ (4) та до входу дви гуна (7), що керує кутовим положенням двоосної платформи (5) по першій осі чутливості гіроскопічного гравіметра (1). Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння працює таким чином. Складова частина gх прискорення сили тяжіння (проекція на вісь Ох) спрямована вздовж осей (23) і (24) внутрішніх рамок (15) і (16) тристепеневих гіроскопів (8) і (9). Останні почнуть повертатись відносно осей (23) і (24) внутрішніх рамок (15) і (16) під дією маятникового моменту mgхl, спрямованого по осям (21) і (22) зовнішньої рамки (14) (m - додаткова маса, розташована на відстані l від перетину осей Оx і Oz обох тристепеневих гіроскопів (8) і (9) вздовж осей обертання роторів цих гіроскопів). Обертання тристепеневих гіроскопів (8) і (9) під дією маятникового моменту призводить до появи електричних сигналів на виходах датчиків (18) і (20) кута, розташованих на осях (23) і (24) внутрішніх рамок (15) і (16). Виходи датчиків (18) і (20) кута підключені до входів датчиків (10) і (11) моменту, розташованих на осях (21) і (22) зовнішньої рамки (14). Датчики (10) і (11) моменту створюють моменти, що компенсують маятникові моменти mgхl. Складова частина gz прискорення сили тяжіння (проекція на вісь Oz) спрямована вздовж осей (21) і (22) зовнішньої рамки (14) тристепеневих гіроскопів (8) і (9). Останні почнуть повертатись відносно осей (21) і (22) зовнішньої рамки (14) під дією маятникового моменту mgzl, спрямованого по осям (23) і (24) внутрішніх рамок (15) і (16). Обер 5 79874 тання тристепеневих гіроскопів (8) і (9) під дією маятникового моменту призводить до появи елек тричних сигналів на виходах датчиків (12) і (13) кута, розташованих на осях (21) і (22) зовнішньої рамки (14). Виходи датчиків (12) і (13) кута підключені до входів датчиків (17) і (19) моменту, розташованих на осях (23) і (24) внутрішніх рамок (15) і (16). Датчики (17) і (19) моменту створюють моменти, що компенсують маятникові моменти mgzl. У гіроскопічному гравіметрі (1), що містить два однакових тристепеневих гіроскопи (8) і (9), формуються два вихідні сигнали fz і f x. Перший сигнал є сумою вихідних сигналів з датчиків (12) і (13) кутів, розташованих на осях (21) і (22) зовнішньої рамки (14) тристепеневих гіроскопів (8) і (9). Оскільки сигнали з датчиків (12) і (13) кута додаються, то вихідний сигнал fz=2gz. Другий сигнал є сумою вихідних сигналів з датчиків (18) і (20) кутів, розташованих на осях (23) і (24) внутрішніх рамок (15) і (16) тристепеневих гіроскопів (8) і (9). Оскільки сигнали з датчиків (18) і (20) кута додаються, то вихідний сигнал fx=2g x. Вихідні сигнали fz і fx гіроскопічного гравіметра (1) подаються на вхід БЦОМ (4) та на входи двигунів (6) і (7). Двигуни (6) і (7) керують кутовим положенням двоосної платформи (5), на якій встановлений гіроскопічний гравіметр (1). У БЦОМ (4) також подаються вихідні сигнали від системи (2) 6 визначення навігаційних параметрів і вихідний сигнал від вимірювача (3) висоти. БЦОМ (4) на основі сигналів fz і fx обчислює повний вектор f прискорення сили тяжіння за формулою (відповідно до Фіг.3): 2 2 æf ö æf ö g = ç z÷ +ç x÷ . è 2ø è2ø БЦОМ (4) на основі значень повного вектору сили тяжіння і даних, що надходять від системи (2) визначення навігаційних параметрів і вимірювача (3) висоти обчислює аномалії прискорення сили тяжіння за формулою [2]: Dg = g + E + A - && - l 0 , h де Е - поправка Етвеша, А - поправка на висоту, && h - вертикальне прискорення літака, γ0 - довідкове значення прискорення сили тяжіння (відносно поверхні еліпсоїда обертання). Література: 1. Патент України на винахід №53478А, G01V7/00. Гравіметр / С.О. Нечай, Д.Г. Тулупов, О.М. Безвесільна, К.В. Меншикова, Є.І. Бобруйко. №2002064813; Заявл. 11.06.2002; Опубл. 15.01.2003, Бюл. №1. 2. Пантелеев В.Л. Основы морской гравиметрии. - М.: Недра, 1983. - 268с. 7 Комп’ютерна в ерстка В. Клюкін 79874 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAircraft gravimetric system for measuring abnormalities of gravity acceleration
Автори англійськоюBezvesilna Olena Mykolaivna, Podchashynskyi Yurii Oleksandrovych
Назва патенту російськоюАвиационная гравиметрическая система для измерения аномалий ускорения силы тяжести
Автори російськоюБезвесильна Елена Николаевна, Подчашинский Юрий Александрович
МПК / Мітки
МПК: G01V 7/00
Мітки: вимірювань, сили, гравіметрична, аномалій, тяжіння, система, прискорення, авіаційна
Код посилання
<a href="https://ua.patents.su/4-79874-aviacijjna-gravimetrichna-sistema-dlya-vimiryuvan-anomalijj-priskorennya-sili-tyazhinnya.html" target="_blank" rel="follow" title="База патентів України">Авіаційна гравіметрична система для вимірювань аномалій прискорення сили тяжіння</a>
Спосіб оптичного вимірювання величини прискорення сили тяжіння
Номер патенту: 33397
Опубліковано: 15.02.2001
Автори: Бурачек Всеволод Германович, Гніденко Микола Володимирович
МПК: G01N 13/10, G01N 13/00
Мітки: величини, сили, тяжіння, оптичного, вимірювання, спосіб, прискорення
Текст:
...ge = 1/12G * ке, звідки ке = & * і2е; (7) Де ge - прискорення сили тяжіння на пункті з відомим значенням величини прискорення сили тяжіння; і 1е - відстань між елементами смуги поглинання на пункті з відомим значенням величини прискорення сили тяжіння. На робочому пункті визначають величину прискорення сили тяжіння за формулою: gp=l/l P 2 * k c , Де gp - прискорення сили тяжіння на робочому пункті ; 1 Р - відстань між елементами...
Спосіб вимірювання компонент градієнта сили тяжіння і градієнтометр
Номер патенту: 56092
Опубліковано: 15.04.2003
Автор: Куделя Леонід Аврамович
МПК: G01V 7/00
Мітки: компонент, сили, спосіб, тяжіння, градієнта, вимірювання, градієнтометр
Формула / Реферат:
1. Спосіб вимірювання компонент градієнта сили тяжіння по різниці їх дії на два пробних тіла, встановлених на незмінній відстані, наприклад, у гравітаційному градієнтометрі, який відрізняється тим, що як пробні тіла використовують принаймні два квантові стандарти частоти 2, 4, визначають дію компонент градієнта сили тяжіння за величиною зміни відносної різниці частоти сигналу, яку вимірюють щонайменше одним компаратором частотним з...
Спосіб визначення ресурсу довговічності обмежено стійких об’єктів у полі сили тяжіння
Номер патенту: 21934
Опубліковано: 30.04.1998
Автори: Оніка Сергій Георгійович, Грицаєнко Василь Іванович, Бойчук Константин Константинович, Мантула Юрій Макарович, Кривошеєв Олександр Васильович, Карпухін Валерій Васильович
МПК: G01V 3/08
Мітки: визначення, ресурсу, об'єктів, довговічності, стійких, полі, сили, спосіб, обмежено, тяжіння
Формула / Реферат:
Способ определения ресурса долговечности ограниченно устойчивых объектов в поле силы тяжести, включающий режимные наблюдения на поверхности этих объектов аномальной динамической напряженности магнитного поля формирующихся поверхностей отрыва или поверхностей скольжения подвижных масс разрушающихся объектов относительно неподвижных и определение минимальной глубины формирующихся поверхностей отрыва в случае фиксации на поверхности...
Авіаційна оптико-електронна прицільна система
Номер патенту: 65393
Опубліковано: 15.03.2004
Автори: Дубінін Валерій Михайлович, Писарець Володимир Олексійович, Терещук Антоній Олексійович, Таранушко Георгій Іванович, Прибилов Георгій Якович, Кравченко Володимир Йосипович, Михайлик Олександр Костянтинович
МПК: F41G 7/20
Мітки: система, авіаційна, оптико-електронна, прицільна
Формула / Реферат:
Авіаційна оптико-електронна прицільна система, що містить захисний ковпак, скануюче дзеркало з двокоординатним електромеханічним слідкуючим приводом і датчиками кутів його розвороту по азимуту і куту місця, нерухоме розподільне дзеркало, нерухоме дзеркало оглядово-слідкуючого теплопеленгатора, оглядово-слідкуючий теплопеленгатор, лазерний дальномір, нашоломну систему цілевказування та індикації та багатовходовий спеціалізований цифровий...
Гравіметр для вимірювання абсолютного значення прискорення сили ваги
Номер патенту: 6921
Опубліковано: 31.03.1995
Автор: Федоровський Борис Миколайович
МПК: G01V 7/00
Мітки: вимірювання, значення, прискорення, ваги, гравіметр, абсолютного, сили
Формула / Реферат:
(57) . Гравиметр для измерения абсолютного значения ускорения силы тяжести, содержащий пробное тело, выполненное в виде уголкового светоотражателя и помещенное в вакуумную камеру, интерферометр, систему измерения пути и времени свободного движения пробного тела, блок управления измерениями и катапульту для подбрасывания пробного тела вертикально вверх на заданную высоту, состоящую из катушки соленоида и сердечника, связанного с...
Попередній патент: Спосіб отримання комплексу біологічно активних речовин з протимікробною та мембраностабілізувальною дією
Наступний патент: Спосіб визначення схильності до спайкової хвороби
Випадковий патент: Спосіб діагностики розвитку атеросклерозу