Авіаційна оптико-електронна прицільна система
Номер патенту: 65393
Опубліковано: 15.03.2004
Автори: Таранушко Георгій Іванович, Терещук Антоній Олексійович, Прибилов Георгій Якович, Кравченко Володимир Йосипович, Писарець Володимир Олексійович, Дубінін Валерій Михайлович, Михайлик Олександр Костянтинович

Формула / Реферат
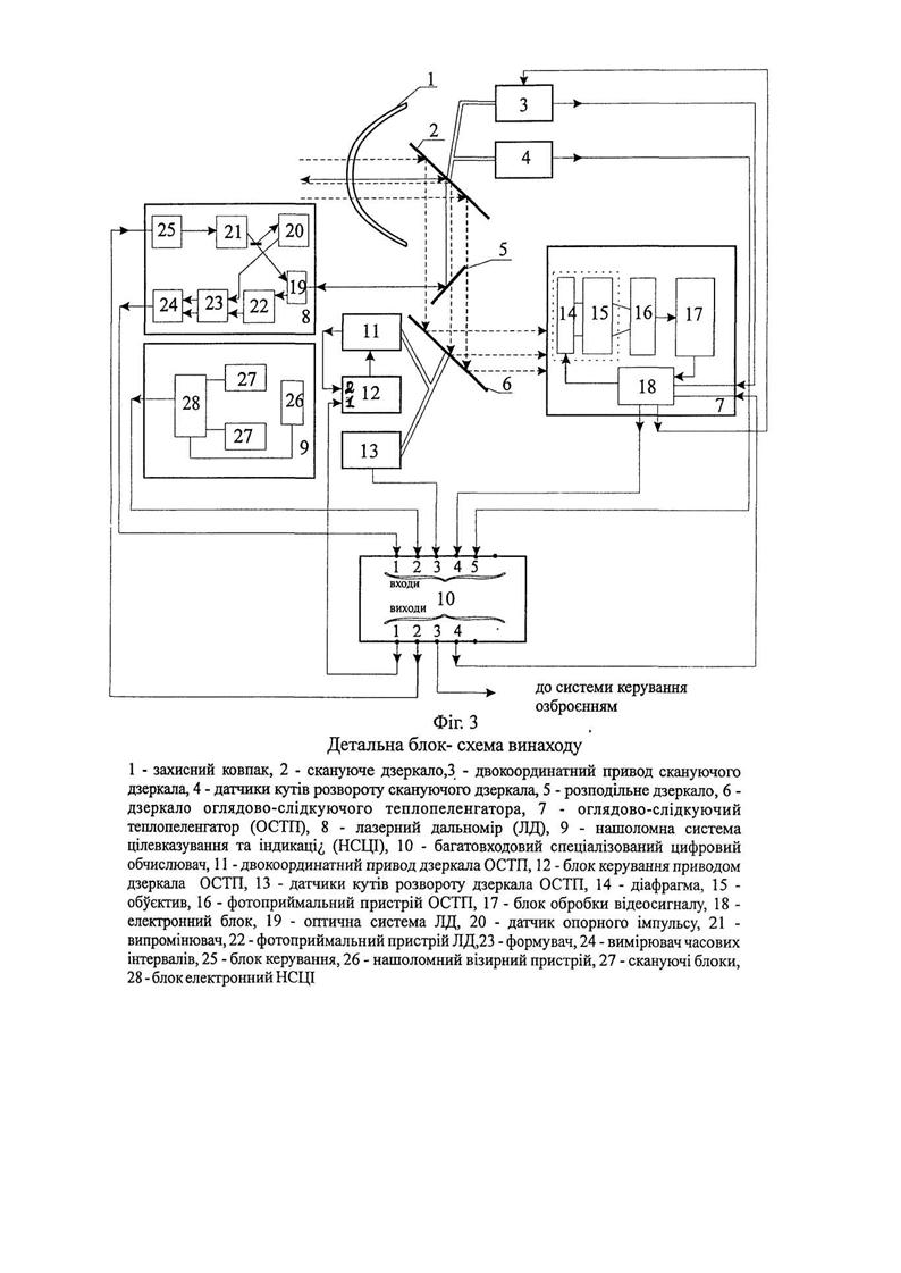
Авіаційна оптико-електронна прицільна система, що містить захисний ковпак, скануюче дзеркало з двокоординатним електромеханічним слідкуючим приводом і датчиками кутів його розвороту по азимуту і куту місця, нерухоме розподільне дзеркало, нерухоме дзеркало оглядово-слідкуючого теплопеленгатора, оглядово-слідкуючий теплопеленгатор, лазерний дальномір, нашоломну систему цілевказування та індикації та багатовходовий спеціалізований цифровий обчислювач, причому захисний ковпак виконаний з прозорого матеріалу для теплового та лазерного випромінювання, нерухоме розподільне дзеркало пропускає без завад теплове випромінювання та повністю відбиває лазерне випромінювання в обох напрямках його руху, а нерухоме дзеркало оглядово-слідкуючого теплопеленгатора весь потік теплового випромінювання цілі спрямовує в оптичну систему оглядово-слідкуючого теплопеленгатора, двокоординатний електромеханічний слідкуючий привід та датчики кутів розвороту механічно під'єднані до осей скануючого дзеркала, виходи лазерного дальноміра, нашоломної системи цілевказування та індикації, датчиків кутів розвороту скануючого дзеркала та перший вихід оглядово-слідкуючого теплопеленгатора під'єднані до входів багатовходового спеціалізованого цифрового обчислювача, другий вихід оглядово-слідкуючого теплопеленгатора під'єднаний до входу двокоординатного слідкуючого приводу скануючого дзеркала, а до першого та другого входів оглядово-слідкуючого теплопеленгатора під'єднані вихід двокоординатного слідкуючого приводу скануючого дзеркала та четвертий вихід багатовходового спеціалізованного цифрового обчислювача, відповідно, а третій та другий виходи обчислювача під'єднані до системи керування озброєнням та входу лазерного дальноміра, відповідно, яка відрізняється тим, що нерухоме дзеркало оглядово-слідкуючого теплопеленгатора виконано рухомим, додатково введені другий двокоординатний електромеханічний слідкуючий привід, блок керування додатковим приводом та додаткові датчики кутів розвороту дзеркала оглядово-слідкуючого теплопеленгатора по азимуту та куту місця, причому вихід додаткових датчиків під'єднаний до третього входу обчислювача, перший вихід якого під'єднаний до першого входу блока керування додатковим приводом, другий вхід якого під'єднаний до виходу додаткового слідкуючого приводу, а вхід під'єднаний до виходу блока керування додатковим приводом.
Текст
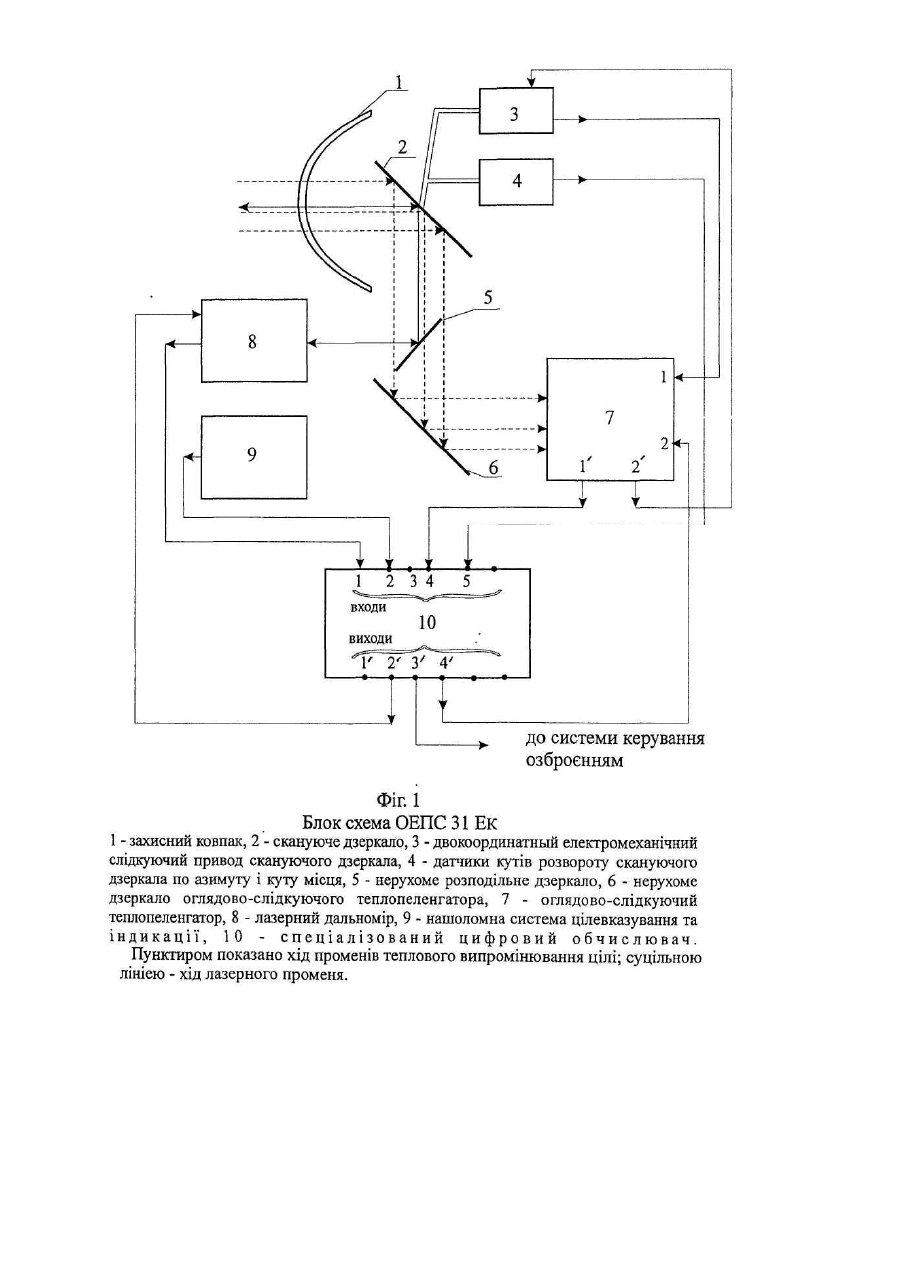
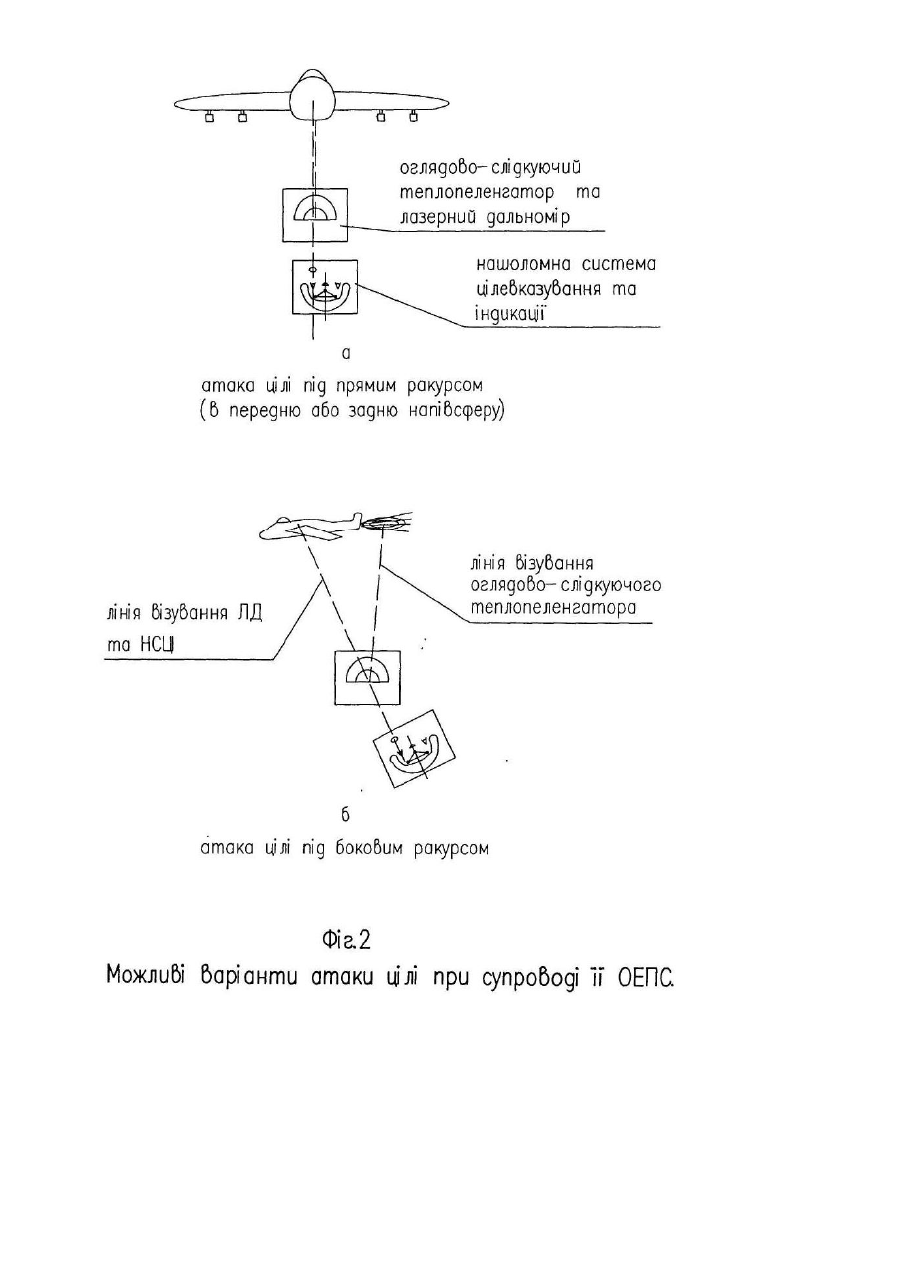
Винахід належить до авіаційних оптико-електронних оглядово-пошукових систем цілевказування та прицілювання, скорочено - оптико-електронні прицільні системи (ОЕПС). Відомий цілий ряд таких систем: - "КОЛС-29", якими опоряджуються літаки типу МіГ-29; - "31E", "31ЕК", "31ЕМ", якими опоряджуються літаки типу Су-27, С у-30 та інші. Всі вони мають однакове функціональне призначення: огляд закабінного простору, виявлення, супроводження повітряних цілей, (або по їх тепловому випромінюванню - з допомогою оглядовослідкуючого теплопеленгатора (ОСТП), або візуально - з допомогою нашоломної системи цілевказування та індикації (НСЦІ), вимір дальності до цілі з допомогою лазерного дальноміра (ДД), а також формування та видачу даних для цілевказування та прицілювання авіаційного озброєння. Зазначені ОЕПС містять в своєму складі аналогічні складові (див. фіг.1.) - захисний ковпак (1), скануюче дзеркало (2), двокоординатний електромеханічний слідкуючий привод скануючого дзеркала (3), датчики кутів розвороту скануючого дзеркала по азимуту і куту місця (4), нерухоме розподільне дзеркало (5), нерухоме дзеркало оглядово-слідкуючого теплопеленгатора (6), оглядово-слідкуючий теплопеленгатор (7), лазерний дальномір (8), нашоломну систему цілевказування та індикації (9), а також багатовходовий спеціалізований цифровий обчислювач - СЦО (10), який обслуговує крім ОЕПС інші прилади та системи бортового радіоелектронного обладнання. Відзначимо деякі особливості роботи підсистем, які входять до складу ОЕПС. НСЦІ - призначена для формування лінії візування (ЛВ) цілі та первинних складових для обчислення координат цієї ЛВ з допомогою СЦО. Отримані координати ЛВ НСЦІ використовуються для попереднього цілевказування ОСТП, або для наведення головок самонаведення ракет. Точність цілевказування НСЦІ, які встановлені на літаках наданий час не перевищує 30'-40'. ОСТП - виявляє ціль шляхом пошуку, реєстрації, обробки та аналізу теплового випромінювання і визначення кутових координат його джерела. Функціонує в режимах огляду простору, виявлення цілі, визначення її кутових координат, захоплення та супроводження цілі. Найбільш точно координати цілі визначаються в режимі супроводження. Похибка в цьому режимі складає не більше 15'. При супроводженні цілі ОСТП слідкує за точкою в просторі, яка має найбільшу теплову енергію. Ця точка, знаходиться в струмені розжарених газів і в нормальному режимі роботи двигуна цілі знаходиться близько зрізу сопла двигуна, а в режимах "Максимал" і "Форсаж" зміщується від сопла на відстань до 3050см. ЛД - призначений для вимірювання дальності до цілі. Для вимірювання дальності в напрямку цілі випромінюється потужний вузьконаправленний лазерний промінь, який відбившись від цілі попадає на фотоприймальний пристрій ЛД ФПП-2. По зареєстрованому проміжку часу від моменту випромінювання до моменту реєстрації відбитого променя ФПП ЛД визначається дальність до цілі. Для збільшення діапазону вимірюваної дальності промінь роблять якомога вужчим. Розходження променя в сучасних ЛД складає від 20' до 5'. В зв'язку з цим наводити промінь ЛД на корпус цілі потрібно з дуже високою точністю. Виходячи з цього будується робота ОЕПС в ближньому повітряному бою. Льотчик, виявивши візуально ціль, з допомогою НСЦІ дає попередню цілевказівку ОСТП, сумістивши прицільну марку (ПМ) з ціллю. ОСТП, по заданих НСЦІ координатах виявляє ціль, захоплює її і переходить в режим автоматичного супроводження цілі. По сигналу ОСТП про перехід його в режим супроводження цілі СЦО видає команду ЛД на вимірювання дальності до цілі. При вимірюванні дальності напрямок лазерного променя ЛД співпадає з напрямком ЛВ ОСТП. При атаці цілі в задню та передню напівсферу (див. фіг.2а), точка, яка має найбільшу теплову енергію, і за якою слідкує ОСТП, співпадає з корпусом літака і вимірювання дальності ЛД відбувається надійно з високою точністю. При атаці цілі під іншими ракурсами картина змінюється і в гіршому випадку (фіг.2б ) лазерний промінь ЛД може не попадати на корпус літака, що призводить до збоїв в роботі ЛД, похибок у вимірюванні дальності і неефективного використання ресурсу ЛД, який надзвичайно обмежений. До причин, що заважають досягненню вказаної нижче нової якості ОЕПС, належить те, що розподільне дзеркало та дзеркало ОСТП є нерухомими, що не дозволяє корегувати напрямок променя ЛД по відношенню до ЛВ ОСТП. Відома ОЕПС-29, до складу якої входять візирна головка з захисним ковпаком, в якій розташовані скануюче дзеркало з двома електромеханічними слідкуючими приводами і цифровими датчиками положення дзеркала, нерухоме розподільне дзеркало, а також НСЦІ та ОСТП, з вмонтованим в нього ЛД, та спеціалізований обчислювач. (опис наведено в учбовому посібнику «Бортовой комплекс самолетовождения, применения и управления вооружением самолета МиГ-29Б» УДК.621.396.6:629.7 та посібнику "Комплекс ОЕПС-29" видавництво військово-повітряної академії ім. проф. H.E. Жуковського, м. Москва, під редакцією В.М. Сидоріна). Недоліком цієї ОЕПС є те, що енергія імпульсу ЛД виводиться в напрямку ЛВ ОСТП через нерухоме розподільне дзеркало, що не дає змоги коригувати положення лазерного променя відносно ЛВ ОСТП. Аналогічні недоліки мають ОЕПС "31", "31 ЕК", "31 ЕМ", типова блок-схема яких наведена на фіг.1. Нерухомі розподільне дзеркало та дзеркало оглядово-слідкуючого теплопеленгатора не дозволяють коригувати положення променя ЛД відносно ЛВ ОСТП. Найбільш близькою за призначенням до заявлюваної по сукупності ознак і досягаємих технічних властивостях є ОЕПС 31ЕК, блок-схема якої наведена на фіг.1. Вона містить захисний ковпак (1), скануюче дзеркало (2) з двокоординатним електромеханічним слідкуючим приводом (3) і датчиками кутів його розвороту по азимуту і к уту місця (4), нерухоме розподільне дзеркало (5), нерухоме дзеркало оглядовослідкуючого теплопеленгатора (6), оглядово-слідкуючий теплопеленгатор (7), лазерний дальномір (8), нашоломну систему цілевказування та індикації (9) та спеціалізований багатовходовий цифровий обчислювач (10). (опис наведено в руководстве по технической эксплуатации (часть2) «Комплекс 31ЕК. БЦ1.070.010 РЭ1» стр. 15-21 видавництва «Уральского оптико-механического завода»). Ця ОЕПС вибрана в якості прототипу. До причин, які перешкоджають досягненню наведеної нижче якості належить те, що розподільне дзеркало та дзеркало, яке спрямовує промені теплового випромінювання в канал ОСТП, є нерухомими, що не дозволяє коригувати напрямок променя ЛД по відношенню до ЛВ ОСТП. При розробці заявляємого технічного рішення вирішувалось завдання підвищення ефективності використання ОЕПС шляхом підвищення надійності і точності вимірювання дальності до цілі та більш ефективного використання ресурсу ЛД за рахунок більш точного наведення променя ЛД на корпус цілі. Для розв'язання поставленого завдання у відомій ОЕПС, яка містить захисний ковпак, скануюче дзеркало з двокоординатним електромеханічним слідкуючим приводом і датчиками кутів його розвороту по азимуту і куту місця, нерухоме розподільне дзеркало, нерухоме дзеркало оглядово-слідкуючого теплопеленгатора, оглядово-слідкуючий теплопеленгатор, лазерний дальномір, нашоломну систему цілевказування та індикації та багатовходовий спеціалізований цифровий обчислювач, причому захисний ковпак виконано з матеріалу прозорого для теплового та лазерного випромінювання, нерухоме розподільне дзеркало пропускає без завад теплове випромінювання та повністю відбиває лазерне випромінювання в обох напрямках його руху, а нерухоме дзеркало оглядово-слідкуючого теплопеленгатора весь потік теплового випромінювання цілі спрямовує в оптичну систему оглядово-слідкуючого теплопеленгатора, двокоординатний електромеханічний слідкуючий привод, та датчики кутів розвороту механічно під'єднані до вісей скануючого дзеркала, виходи лазерного дальноміру, нашоломної системи цілевказування та індикації, датчиків кутів розвороту скануючого дзеркала та перший вихід оглядово-слідкуючого теплопеленгатора під'єднані до входів багатовходового спеціалізованого цифрового обчислювача, другий ви хід оглядовослідкуючого теплопеленгатора під'єднано до входу двокоординатного слідкуючого приводу скануючого дзеркала, а до першого та другого входів оглядово-слідкуючого теплопеленгатора під'єднані вихід двокоординатного слідкуючого приводу скануючого дзеркала та четвертий вихід багатовходового спеціалізованного цифрового обчислювача, відповідно, а третій та др угий ви ходи обчислювача під'єднано до системи керування озброєнням та входу лазерного дальноміру, відповідно, яка відрізняється тим, що нерухоме дзеркало оглядово-слідкуючого теплопеленгатора зроблено рухомим і додатково введено другий двокоординатний електромеханічний слідкуючий привод, блок керування додатковим приводом та додаткові датчики кутів розвороту дзеркала оглядово-слідкуючого теплопеленгатора по азимуту та куту місця, причому, вихід додаткових датчиків під'єднано до третього входу обчислювача перший вихід якого під'єднано до першого входу блоку керування додатковим приводом другий вхід якого під'єднано до виходу додаткового слідкуючого приводу, а вхід під'єднано до виходу блоку керування додатковим приводом. До складу ОЕПС входять також вторинні джерела живлення для живлення електричним струмом всіх підсистем ОЕПС та їх вузлів (на блок-схемі не наведені). Рухоме дзеркало з слідкуючим двокоординатним приводом, блоком керування приводом та датчиками кутів розвороту дзеркала ОСТП дають змогу коригувати положення променя ЛД відносно ЛВ ОСТП. При створенні винаходу підсистеми.ОСТП та ЛД запозичені з прототипу - ОЕПС 31 ЕК, НСЦІ запозичена з патенту №50587 А , опис якої наведено в бюлетені Укрпатенту №10 від 15.10.2002р. Детальна блок-схема винаходу наведена на фіг.3. Наведена ОЕПС містить в собі захисний ковпак (1), прозорий для теплового та лазерного випромінювання, скануюче дзеркало (2), з азимутальним та кутомістним електромеханічними слідкуючими приводами (3), та датчиками кутів розвороту скануючого дзеркала в азимутальній та кутомістній площинах (4), нерухоме розподільне дзеркало (5), яке пропускає ІЧВ, та повністю відбиває лазерний промінь в обох напрямках, дзеркало ОСТП (6), яке спрямовує ІЧВ в оптичну систему ОСТП. В даному випадку воно зроблено рухомим і до вісей його розворотів під'єднані електромеханічні слідкуючи приводи (11) з блоком керування (12), та датчики розвороту дзеркала в азимутальній та кутомістній площинах (13). ОСТП (7) містить оптичну систему куди входить: - діафрагма з приводом (14), що регулює ІЧВ в залежності від величини сигналу; - об'єктив (15), призначений для фокусування ІЧВ в площині розташування фотоприймального пристрою; - фо топриймальний пристрій ФПП-1 (16), який містить багато площадковий приймач ІЧВ, що перетворює теплове випромінювання в електричний сигнал, та блок охолодження чутливи х елементів ФПП-1; - багатоканальний блок обробки видеосигналу (17), в якому здійснюється підсилення сигналу, його оптимальна частотна обробка по кожному каналу і формування сигналу цілі при перевищенні відеосигналом сформованого порогу ФПП-1; - електронний блок (18), призначений для обміну інформацією з СЦО, обробки інформації, яка поступає з слідкуючого приводу скануючого дзеркала, блоку обробки відеосигналу; формування сигналів керування приводами сканую чого дзеркала в залежності від заданого СЦО режиму роботи ОСТП. ЛД (8) що містить в собі : - оптичну систему ЛД (19), яка забезпечує формування лазерного променя в напрямку цілі, прийом та фокусування відбитого від цілі променя в площині розташування ФПП-2 ЛД; - датчик опорного імпульсу (20); - випромінювач (21) з високовольтним блоком живлення та терморегулятором; - фотоприймальний пристрій ФПП-2 ЛД (22), який перетворює відбитий від цілі лазерний промінь в електричний сигнал; - формувач (23) - формує опорні імпульси та імпульси відбитого променя ЛД; - вимірювач часових інтервалів (24), який вимірює час між опорним імпульсом та першим відбитим від цілі імпульсом; - блок керування (25), який забезпечує режими роботи випромінювача (21) та вимірювача часових інтервалів (24). НСЦІ (9), що містить в собі: - нашоломний візирний пристрій (26), розташований на захисному шоломі льотчика, який містить коліматорний візир з напівпрозорим відзеркалювальним елементом, розташованим в безпосередній близкості від ока льотчика, на який виводяться сколімовані в безмежність кольорові прицільна (ПМ) та сигнальна (CM) марки, 3 випромінювачі інфрачервоного випромінювання, які створюють площину, перпендикуляр до якої параллельний ЛВ цілі; - два скануючих блоки (27), розташовані в кабіні літака таким чином, що випромінювачі, розташовані на шоломі оператора, знаходяться постійно в полі зору обох скануючих блоків; - блок електронний, який містить в собі схему керування індикацією марок, формувач кодів пеленгів первинних складових, з допомогою яких в СЦО обчислюються кутові координати ЛВ, а також вторинні джерела живлення та інтерфейс для зв'язку НСЦІ з СЦО. (детальний опис НСЦІ, наведено в бюлетені Укрпатенту №10 від 15.10.2002р. - Деклараційний патент №50587 А) Наведена ОЕПС надає можливість реалізувати режим надійного вимірювання дальності до цілі в ближньому повітряному бою. При цьому робота льотчика в цьому режимі не зазнає суттєви х змін. Як і раніше, льотчик, візуально виявивши ціль, суміщає ПМ НСЦІ з ціллю, видає на НСЦІ команду цілевказування, натиснувши і утримуючи натиснутою кнопку "КЦУ", і добивається появи сигналу про захоплення цілі ОСТП і перехід ОСТП в режим її автоматичного супроводження ("ЗТР"), (після чого може відпустити кнопку). З появою сигналу про перехід ОСТП в режим супроводження, СЦО дає команду ЛД на вимірювання дальності. Одночасно, при появі цього сигналу, із СЦО, по команді "КЦУ" на приводи дзеркала ОСТП (11), через блок керування (12), подаються сигнали пропорційні різниці кутових координат ЛВ ОСТП (центр теплового випромінювання) та ЛВ НСЦІ (центр корпусу цілі), що в режимі автоматичного супроводження цілі ОСТП призведе до відповідного пропорційного розвороту скануючого дзеркала. При цьому промінь ЛД наводиться не на центр теплового випромінювання, а на центр корпусу цілі, (куди льотчик спрямовує ПМ НСЦІ), що дає змогу надійно вимірювати дальність до цілі. Надалі, при знаходженні ОЕПС в режимі автоматичного супроводження цілі ОСТП в будь-яку мить, льотчик може внести корекцію напрямку променя ЛД сумістивши ПМ НСЦІ з ціллю та натиснувши кнопку "КЦУ". Важливим є те, що при використанні винаходу льотчику не треба змінювати порядок роботи з ОЕПС, корекція напрямку променя ЛД відбувається автоматично при суміщенні ПМ НСЦІ с ціллю та натисканні кнопки "КЦУ" як і в звичайному режимі цілевказування від НСЦІ ("Шлем").
ДивитисяДодаткова інформація
Назва патенту англійськоюAviation optic-electronic sight system
Автори англійськоюMykhailyk Oleksandr Kostiantynovych, Prybylov Heorhii Yakovych, Taranushko Heorhii Ivanovych, Tereschuk Antonii Oleksiiovych
Назва патенту російськоюАвиационная оптико-электронная прицельная система
Автори російськоюМихайлик Александр Константинович, Прибылов Георгий Яковлевич, Таранушко Георгий Иванович, Терещук Антоний Алексеевич
МПК / Мітки
МПК: F41G 7/20
Мітки: авіаційна, оптико-електронна, система, прицільна
Код посилання
<a href="https://ua.patents.su/6-65393-aviacijjna-optiko-elektronna-pricilna-sistema.html" target="_blank" rel="follow" title="База патентів України">Авіаційна оптико-електронна прицільна система</a>
Оптико-електронна система огляду та цілевказування
Номер патенту: 35913
Опубліковано: 17.02.2003
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: F41G 3/22
Мітки: огляду, система, оптико-електронна, цілевказування
Формула / Реферат:
1. Оптико-електронна система огляду та цілевказування, яка містить прилад нічного бачення, до складу якого входять послідовно з'єднані об'єктив, блок перетворення вхідного зображення та блок візуалізації зображення, реперний вузол, виконаний у вигляді набору реперних елементів, а також пристрій дистанційного визначення орієнтації реперного вузла та блок формування кутів цілевказування, яка відрізняється тим, що реперний вузол конструктивно...
Нашоломна бінокулярна індикаторна система
Номер патенту: 34642
Опубліковано: 15.03.2001
Автори: Кондратов Петро Олександрович, Шклярський Володимир Іванович, Гой Віталій Миколайович
МПК: G02B 6/43, G02B 5/08, H04N 5/74
Мітки: індикаторна, система, бінокулярна, нашоломна
Формула / Реферат:
Нашоломна бінокулярна індикаторна система, яка містить канал для правого ока. що складається з оптично спряжених першого проекційного кінескопа, першого об'єктива, першого поворотного дзеркала та канал для лівого ока, що складається з оптично спряжених другого проекційного кінескопа, другого об'єктива, другого поворотного дзеркала, а також блок керування, електрично зв'язаний із виводами проекційних кінескопів, яка відрізняється тим, що у...
Електронна грошова система
Номер патенту: 45399
Опубліковано: 15.04.2002
Автор: Розен Шолом
МПК: G07F 19/00, G07F 7/08
Мітки: грошова, система, електронна
Формула / Реферат:
1. Система для передачі електронних банкнот між електронними модулями, що містить електронні модулі, кожний з яких має процесор, пам'ять та засоби для створення криптографічно безпечного каналу, а також для передачі і приймання електронних банкнот по цьому криптографічно безпечному каналу і в кожному з яких в його пам'яті зберігаються електронні банкноти, кожна з яких містить основну групу полів даних, що має дані про грошову вартість даної...
Електронна система запалювання
Номер патенту: 5722
Опубліковано: 29.12.1994
Автори: Лисенко Володимир Сергійович, Мірошніченко Олег Анатолійович, Лисенко Валентин Сергійович
МПК: F02P 3/00
Мітки: електронна, система, запалювання
Формула / Реферат:
1. Электронная система зажигания, содержащая источник питания, минусовый выход которого соединен с общей шиной, двухтактный транзисторный инвертор напряжения, первый и второй выводы вторичной обмотки трансформатора которого являются выходами инвертора и подключены к соответствующим входам выпрямителя, тиристор, катод которого соединен с общей шиной и первым выходом выпрямителя, а анод - со вторым выходом выпрямителя, накопительный конденсатор...
Електронна охоронна система
Номер патенту: 47350
Опубліковано: 17.06.2002
Автори: Пархоменко Олександр Миколайович, Тютюннік Микола Петрович
МПК: G08B 13/00
Мітки: охоронна, система, електронна
Формула / Реферат:
1. Електронна охоронна система, яка містить датчики тривожної сигналізації із сигнальними сенсорами, об'єднані в мережу через програмний блок управління системою з блоком зв'язку, що використовує існуючі радіомережі, зокрема радіотелефонні мережі з частотою мобільної радіотелефонії, який зв'язаний із прийомною центральною станцією, яка відрізняється тим, що вона додатково містить відеокамери та мікрофони схованої установки і блок запису...
Попередній патент: Фізіологічно активний презерватив
Наступний патент: Спосіб оцінки ефективності лікування целіакії
Випадковий патент: Поверхневе покриття