Система управління біотехнічними об’єктами
Номер патенту: 85587
Опубліковано: 25.11.2013
Автори: Лисенко Віталій Пилипович, Решетюк Володимир Михайлович, Штепа Володимир Миколайович

Формула / Реферат
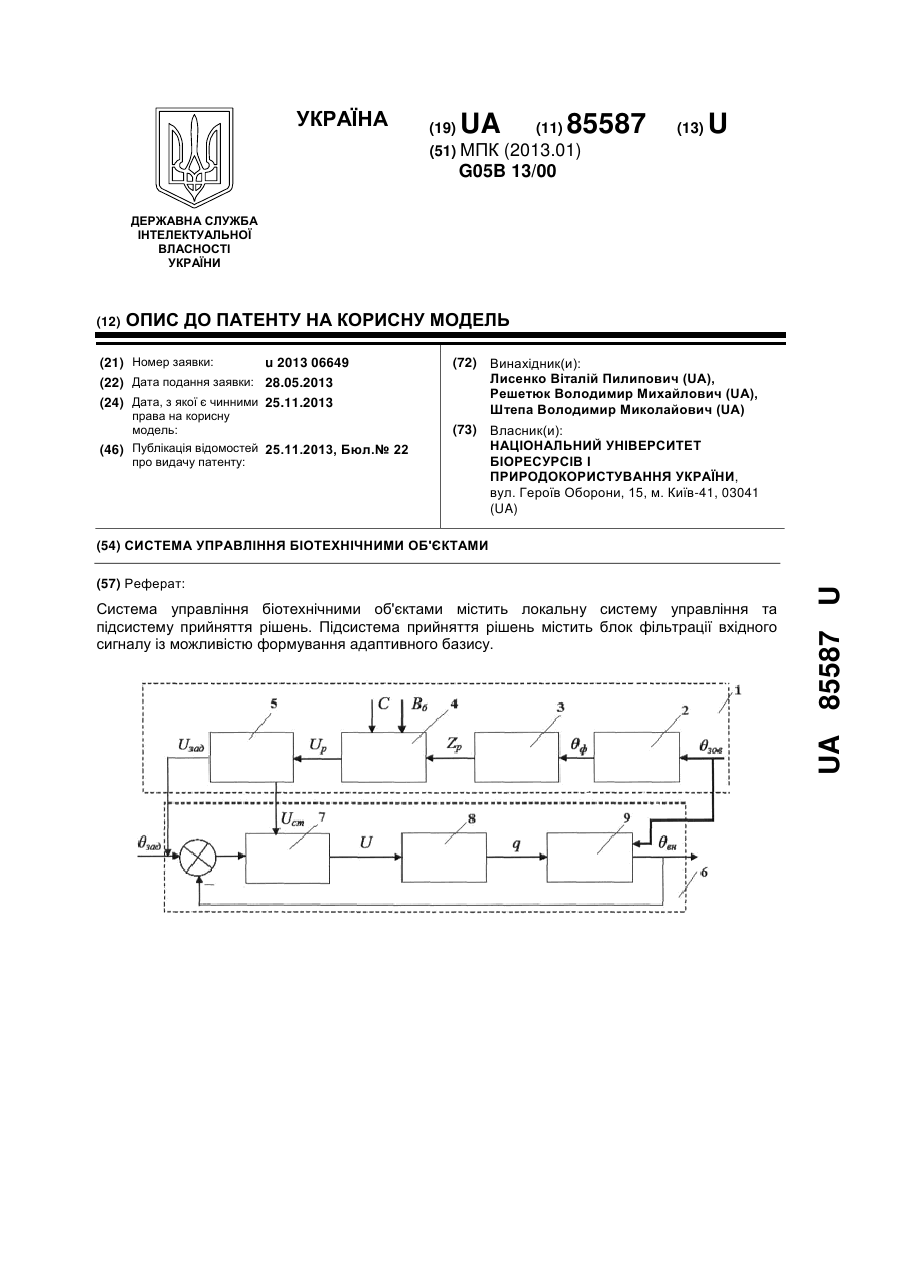
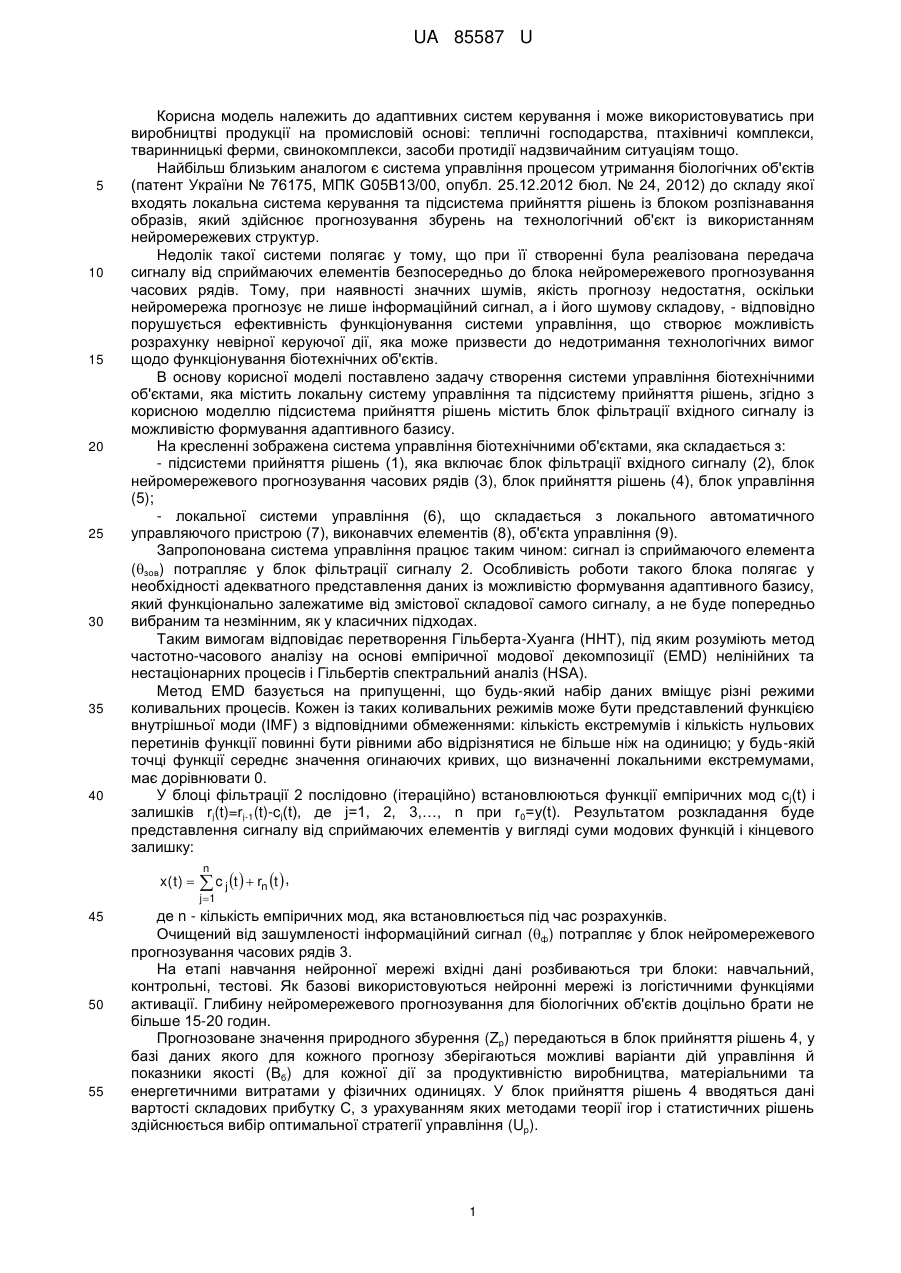
Система управління біотехнічними об'єктами, що містить локальну систему управління та підсистему прийняття рішень, яка відрізняється тим, що підсистема прийняття рішень містить блок фільтрації вхідного сигналу із можливістю формування адаптивного базису.
Текст
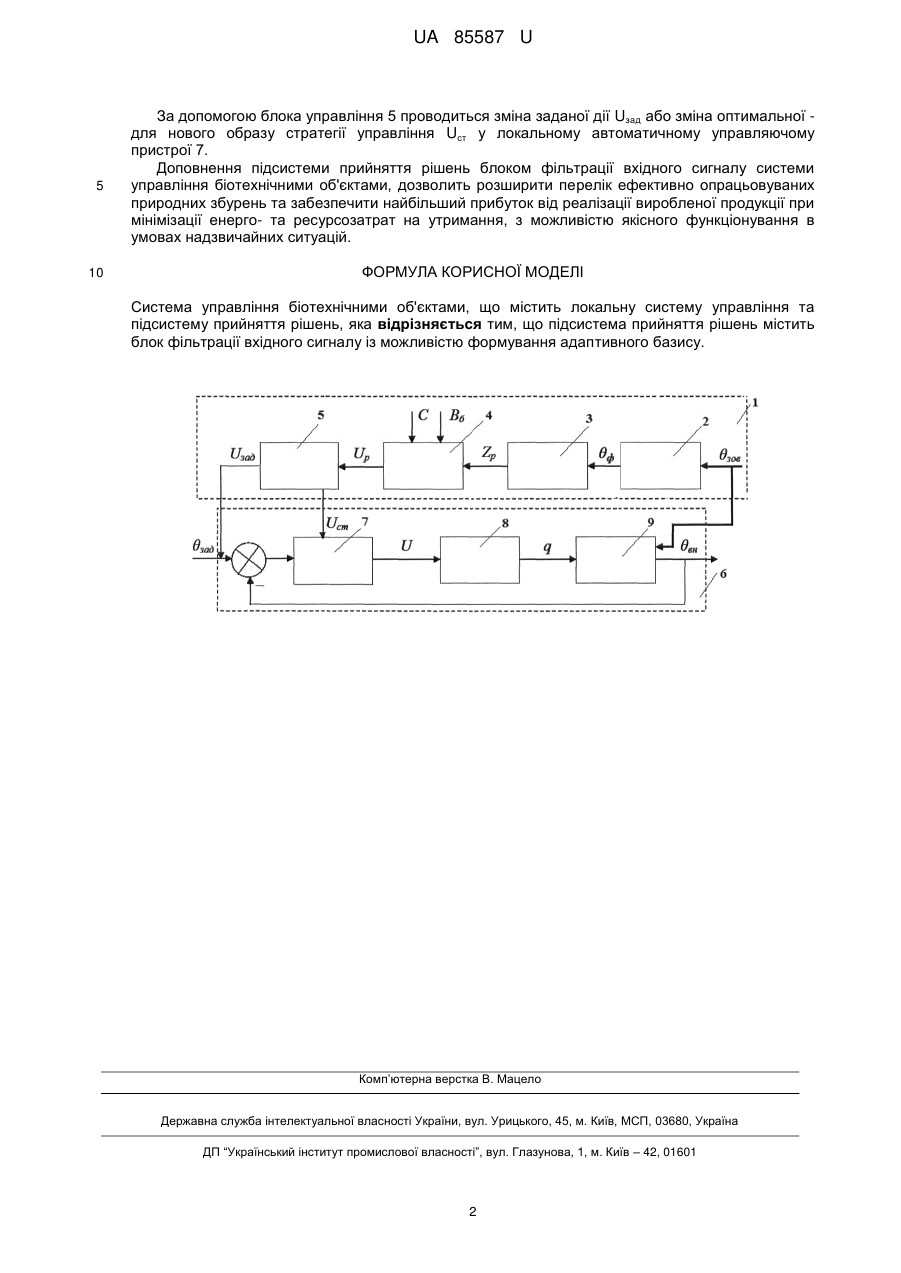
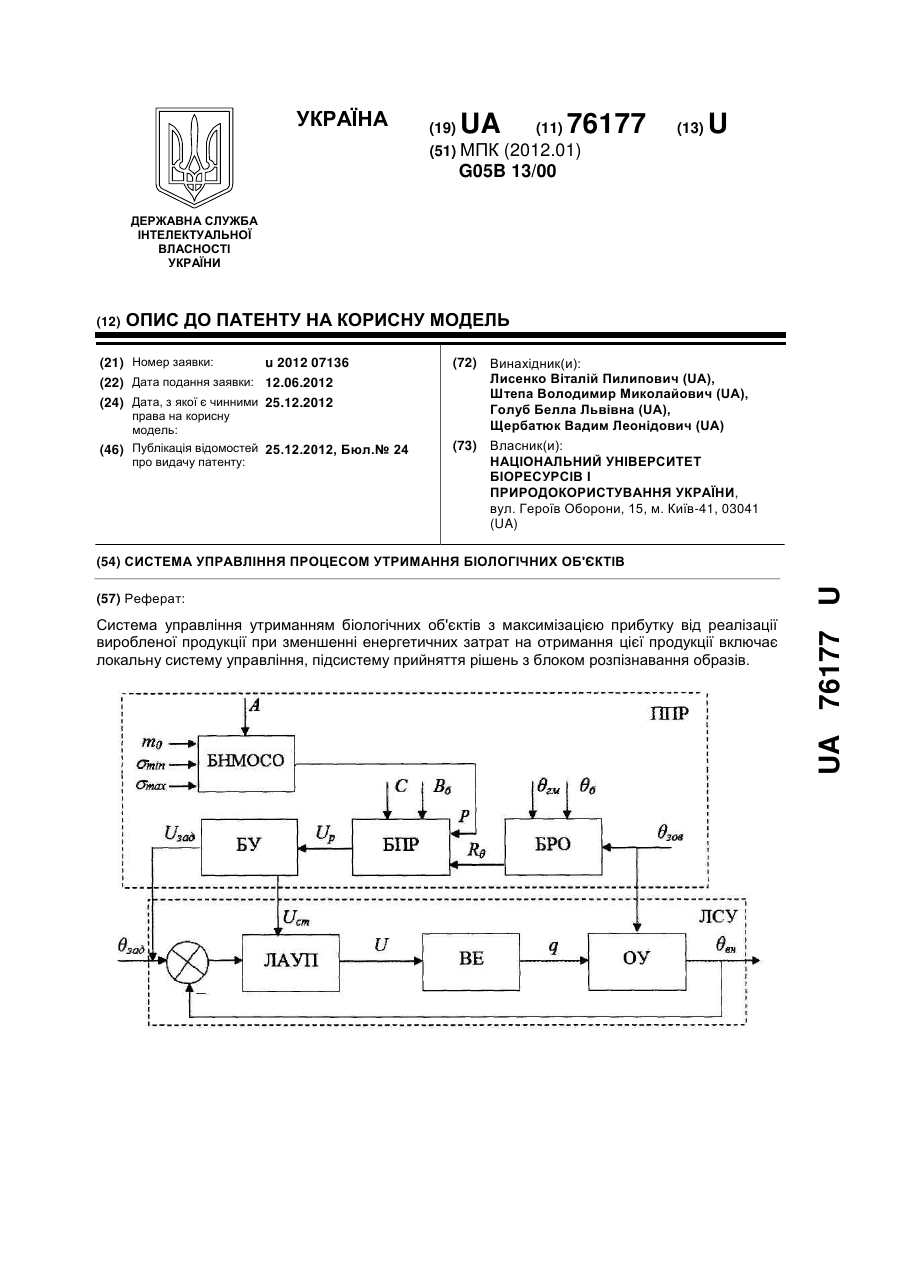
Реферат: Система управління біотехнічними об'єктами містить локальну систему управління та підсистему прийняття рішень. Підсистема прийняття рішень містить блок фільтрації вхідного сигналу із можливістю формування адаптивного базису. UA 85587 U (54) СИСТЕМА УПРАВЛІННЯ БІОТЕХНІЧНИМИ ОБ'ЄКТАМИ UA 85587 U UA 85587 U 5 10 15 20 25 30 35 40 Корисна модель належить до адаптивних систем керування і може використовуватись при виробництві продукції на промисловій основі: тепличні господарства, птахівничі комплекси, тваринницькі ферми, свинокомплекси, засоби протидії надзвичайним ситуаціям тощо. Найбільш близьким аналогом є система управління процесом утримання біологічних об'єктів (патент України № 76175, МПК G05B13/00, опубл. 25.12.2012 бюл. № 24, 2012) до складу якої входять локальна система керування та підсистема прийняття рішень із блоком розпізнавання образів, який здійснює прогнозування збурень на технологічний об'єкт із використанням нейромережевих структур. Недолік такої системи полягає у тому, що при її створенні була реалізована передача сигналу від сприймаючих елементів безпосередньо до блока нейромережевого прогнозування часових рядів. Тому, при наявності значних шумів, якість прогнозу недостатня, оскільки нейромережа прогнозує не лише інформаційний сигнал, а і його шумову складову, - відповідно порушується ефективність функціонування системи управління, що створює можливість розрахунку невірної керуючої дії, яка може призвести до недотримання технологічних вимог щодо функціонування біотехнічних об'єктів. В основу корисної моделі поставлено задачу створення системи управління біотехнічними об'єктами, яка містить локальну систему управління та підсистему прийняття рішень, згідно з корисною моделлю підсистема прийняття рішень містить блок фільтрації вхідного сигналу із можливістю формування адаптивного базису. На кресленні зображена система управління біотехнічними об'єктами, яка складається з: - підсистеми прийняття рішень (1), яка включає блок фільтрації вхідного сигналу (2), блок нейромережевого прогнозування часових рядів (3), блок прийняття рішень (4), блок управління (5); - локальної системи управління (6), що складається з локального автоматичного управляючого пристрою (7), виконавчих елементів (8), об'єкта управління (9). Запропонована система управління працює таким чином: сигнал із сприймаючого елемента (зов) потрапляє у блок фільтрації сигналу 2. Особливість роботи такого блока полягає у необхідності адекватного представлення даних із можливістю формування адаптивного базису, який функціонально залежатиме від змістової складової самого сигналу, а не буде попередньо вибраним та незмінним, як у класичних підходах. Таким вимогам відповідає перетворення Гільберта-Хуанга (ННТ), під яким розуміють метод частотно-часового аналізу на основі емпіричної модової декомпозиції (EMD) нелінійних та нестаціонарних процесів і Гільбертів спектральний аналіз (HSA). Метод EMD базується на припущенні, що будь-який набір даних вміщує різні режими коливальних процесів. Кожен із таких коливальних режимів може бути представлений функцією внутрішньої моди (IMF) з відповідними обмеженнями: кількість екстремумів і кількість нульових перетинів функції повинні бути рівними або відрізнятися не більше ніж на одиницю; у будь-якій точці функції середнє значення огинаючих кривих, що визначенні локальними екстремумами, має дорівнювати 0. У блоці фільтрації 2 послідовно (ітераційно) встановлюються функції емпіричних мод сj(t) і залишків rj(t)=rj-1(t)-cj(t), де j=1, 2, 3,…, n при r0=y(t). Результатом розкладання буде представлення сигналу від сприймаючих елементів у вигляді суми модових функцій і кінцевого залишку: x( t ) n c j t rn t , j 1 45 50 55 де n - кількість емпіричних мод, яка встановлюється під час розрахунків. Очищений від зашумленості інформаційний сигнал (ф) потрапляє у блок нейромережевого прогнозування часових рядів 3. На етапі навчання нейронної мережі вхідні дані розбиваються три блоки: навчальний, контрольні, тестові. Як базові використовуються нейронні мережі із логістичними функціями активації. Глибину нейромережевого прогнозування для біологічних об'єктів доцільно брати не більше 15-20 годин. Прогнозоване значення природного збурення (Zp) передаються в блок прийняття рішень 4, у базі даних якого для кожного прогнозу зберігаються можливі варіанти дій управління й показники якості (Вб) для кожної дії за продуктивністю виробництва, матеріальними та енергетичними витратами у фізичних одиницях. У блок прийняття рішень 4 вводяться дані вартості складових прибутку С, з урахуванням яких методами теорії ігор і статистичних рішень здійснюється вибір оптимальної стратегії управління (Up). 1 UA 85587 U 5 10 За допомогою блока управління 5 проводиться зміна заданої дії Uзaд або зміна оптимальної для нового образу стратегії управління Ucт у локальному автоматичному управляючому пристрої 7. Доповнення підсистеми прийняття рішень блоком фільтрації вхідного сигналу системи управління біотехнічними об'єктами, дозволить розширити перелік ефективно опрацьовуваних природних збурень та забезпечити найбільший прибуток від реалізації виробленої продукції при мінімізації енерго- та ресурсозатрат на утримання, з можливістю якісного функціонування в умовах надзвичайних ситуацій. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Система управління біотехнічними об'єктами, що містить локальну систему управління та підсистему прийняття рішень, яка відрізняється тим, що підсистема прийняття рішень містить блок фільтрації вхідного сигналу із можливістю формування адаптивного базису. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюLysenko Vitalii Pylypovych, Reshetiuk Volodymyr Mykhailovych, Shtepa Volodymyr Mykolaiovych
Автори російськоюЛысенко Виталий Филиппович, Решетюк Владимир Михайлович, Штепа Владимир Николаевич
МПК / Мітки
МПК: G05B 13/00
Мітки: управління, об'єктами, біотехнічними, система
Код посилання
<a href="https://ua.patents.su/4-85587-sistema-upravlinnya-biotekhnichnimi-obehktami.html" target="_blank" rel="follow" title="База патентів України">Система управління біотехнічними об’єктами</a>
Система управління процесом утримання біологічних об’єктів
Номер патенту: 76175
Опубліковано: 25.12.2012
Автори: Дудник Алла Олексіївна, Заєць Наталія Анатоліївна, Штепа Володимир Миколайович, Лисенко Віталій Пилипович, Болбот Ігор Михайлович
МПК: G05B 13/00
Мітки: процесом, управління, біологічних, система, об'єктів, утримання
Формула / Реферат:
Система управління утриманням біологічних об'єктів з максимізацією прибутку від реалізації виробленої продукції при зменшенні енергетичних затрат на отримання цієї продукції, що включає локальну систему управління та підсистему прийняття рішень, з блоком прийняття рішень - для розрахунку оптимальних алгоритмів при утриманні біологічних об'єктів, яка відрізняється тим, що підсистема прийняття рішень містить блок нейромережевого прогнозування...
Система управління випарною установкою
Номер патенту: 70552
Опубліковано: 15.10.2004
Автори: Ладанюк Анатолій Петрович, Луцька Наталія Миколаївна
Мітки: установкою, управління, система, випарною
Формула / Реферат:
Система управління випарною установкою, що складається з датчиків, виконавчих механізмів, підсистеми підтримки прийняття рішень, багатовимірних регуляторів, які розділені на дві частини - блок оцінки вектора стану та блок розрахунку оптимального регулятора, яка відрізняється тим, що підсистема підтримки прийняття рішень в режимі реального часу за допомогою баз алгоритмів оптимальних регуляторів, математичних моделей, критеріїв, ситуацій,...
Система управління процесом утримання біологічних об’єктів
Номер патенту: 76177
Опубліковано: 25.12.2012
Автори: Штепа Володимир Миколайович, Голуб Белла Львівна, Щербатюк Вадим Леонідович, Лисенко Віталій Пилипович
МПК: G05B 13/00
Мітки: система, управління, біологічних, об'єктів, утримання, процесом
Формула / Реферат:
Система управління утриманням біологічних об'єктів з максимізацією прибутку від реалізації виробленої продукції при зменшенні енергетичних затрат на отримання цієї продукції, що включає локальну систему управління та підсистему прийняття рішень, з блоком розпізнавання образів, який здійснює прогнозування збурень на технологічний об'єкт, що мають характер стохастичних невизначеностей, та блок прийняття рішень - для розрахунку оптимальних...
Система управління гребенезмащувачем
Номер патенту: 68276
Опубліковано: 15.07.2004
Автори: Бєлозьоров Євген Володимирович, Кашура Олександр Леонідович, Вівденко Юрій Григорійович, Бєлозьорова Вікторія Володимирівна
МПК: B61K 3/00
Мітки: система, гребенезмащувачем, управління
Формула / Реферат:
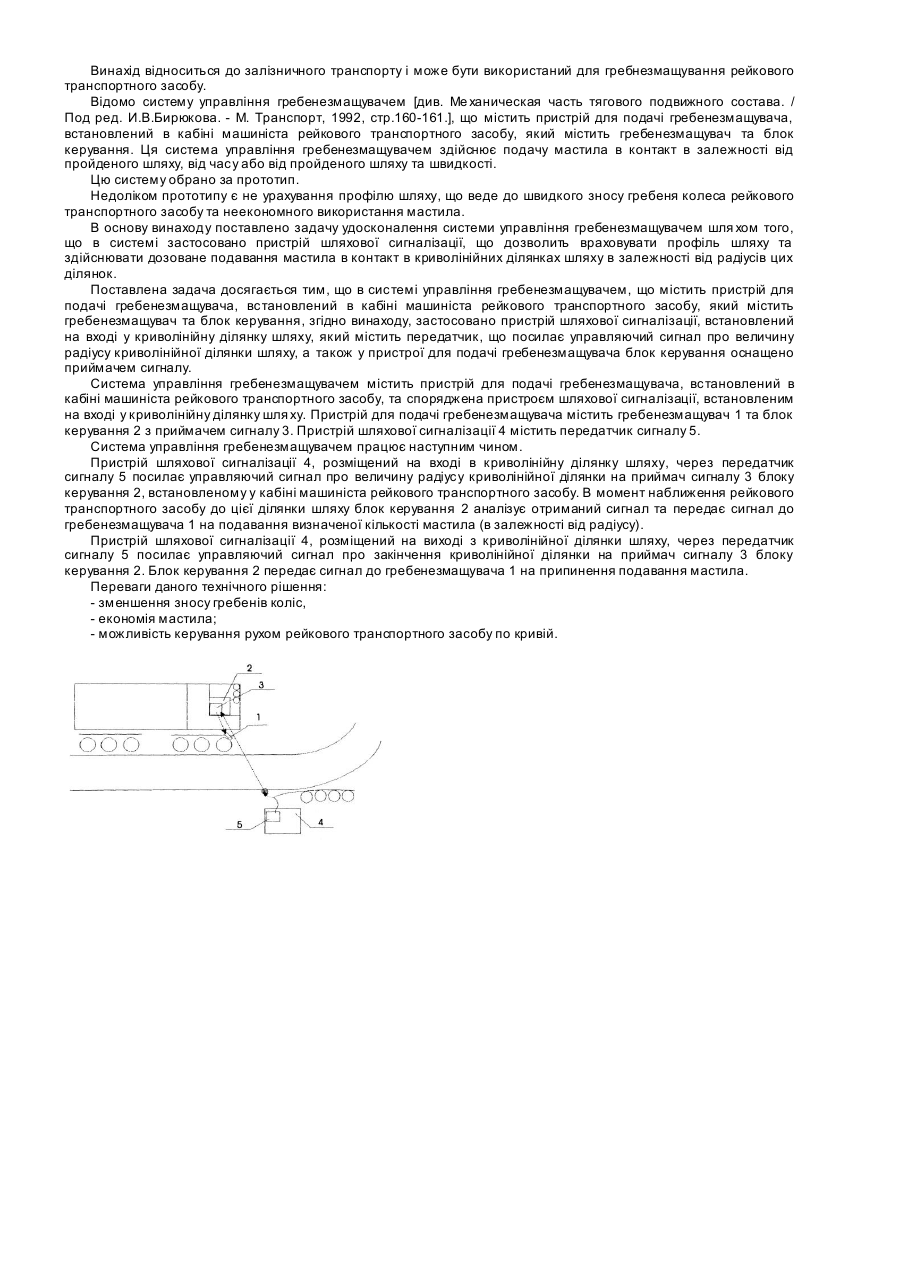
Система управління гребенезмащувачем, що містить пристрій для подачі гребенезмащувача, встановлений у кабіні машиніста рейкового транспортного засобу, який містить гребенезмащувач та блок керування, яка відрізняється тим, що система містить пристрій шляхової сигналізації, встановлений на вході у криволінійну ділянку шляху, і містить передатчик сигналу у пристрої для подачі гребенезмащувача, блок керування оснащено приймачем сигналу.
Адаптивна система управління швидкістю обертання турбіни
Номер патенту: 78888
Опубліковано: 10.04.2013
Автори: Гусєва Альона Олегівна, Симонов Володимир Федорович
МПК: F03B 15/00
Мітки: турбіни, управління, обертання, адаптивна, швидкістю, система
Формула / Реферат:
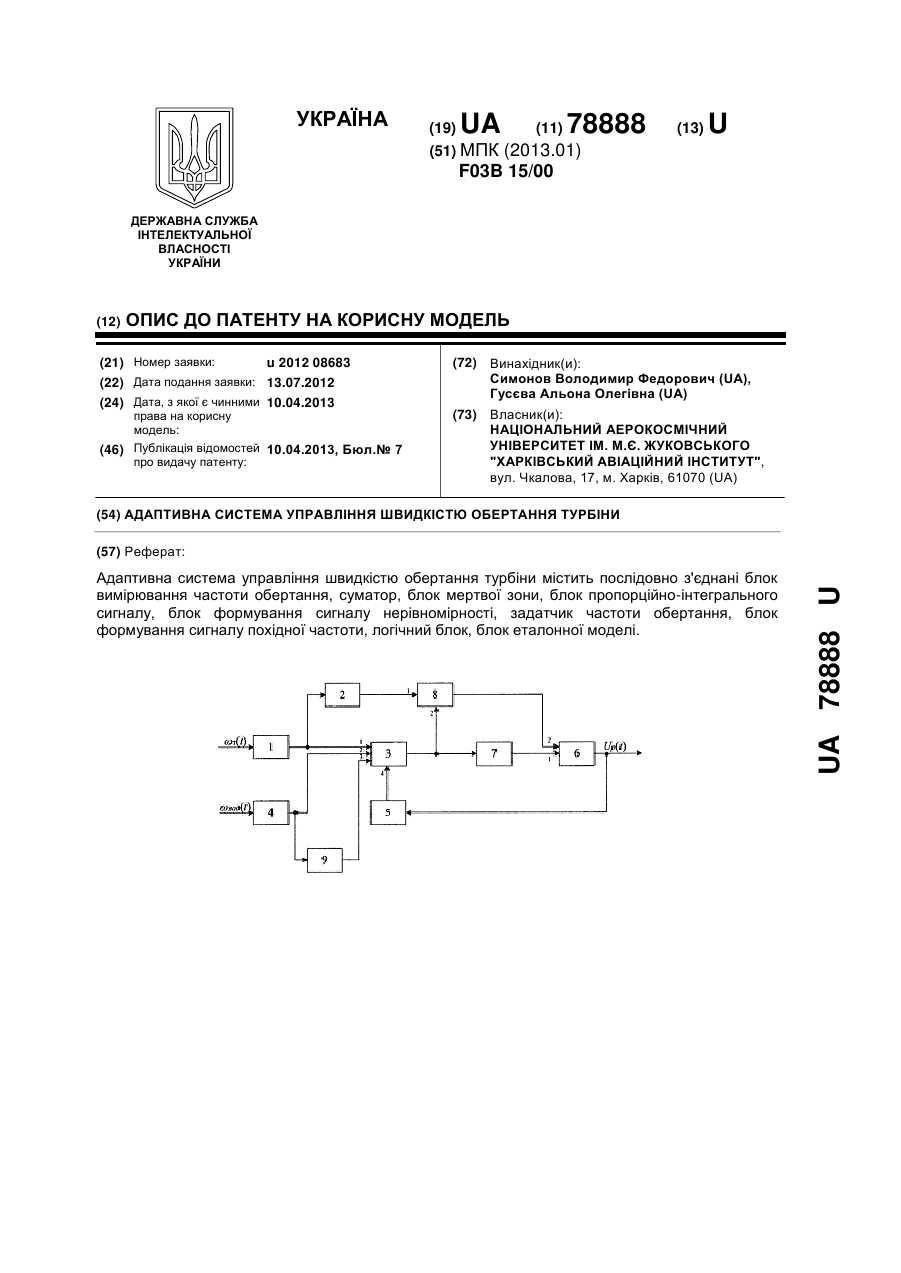
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом...
Попередній патент: Вузол піддатливості для кріплення з коробчастого профілю
Наступний патент: Спосіб одержання подвійних однозаміщених фосфатів цинку-кобальту
Випадковий патент: Спосіб відкритої розробки напівскельних родовищ корисних копалин