Адаптивна система управління швидкістю обертання турбіни
Номер патенту: 78888
Опубліковано: 10.04.2013

Формула / Реферат
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом блока вимірювання частоти обертання, а вихід з'єднаний з першим входом логічного блока, другий вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з другим входом блока пропорційно-інтегрального сигналу, яка відрізняється тим, що в неї введений блок еталонної моделі, вхід якого з'єднаний з виходом блока задатчика частоти обертання, а вихід з'єднаний з третім входом суматора.
Текст
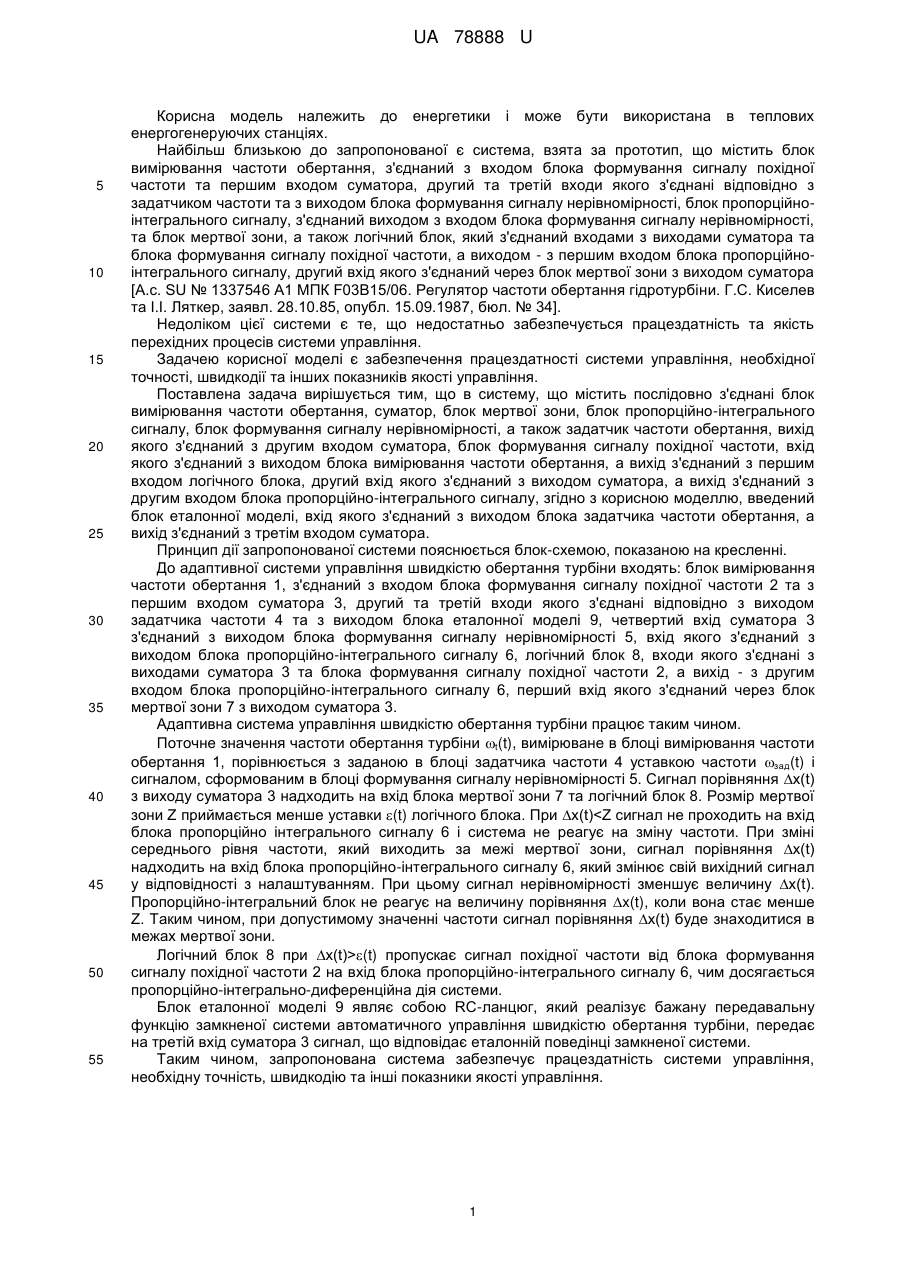
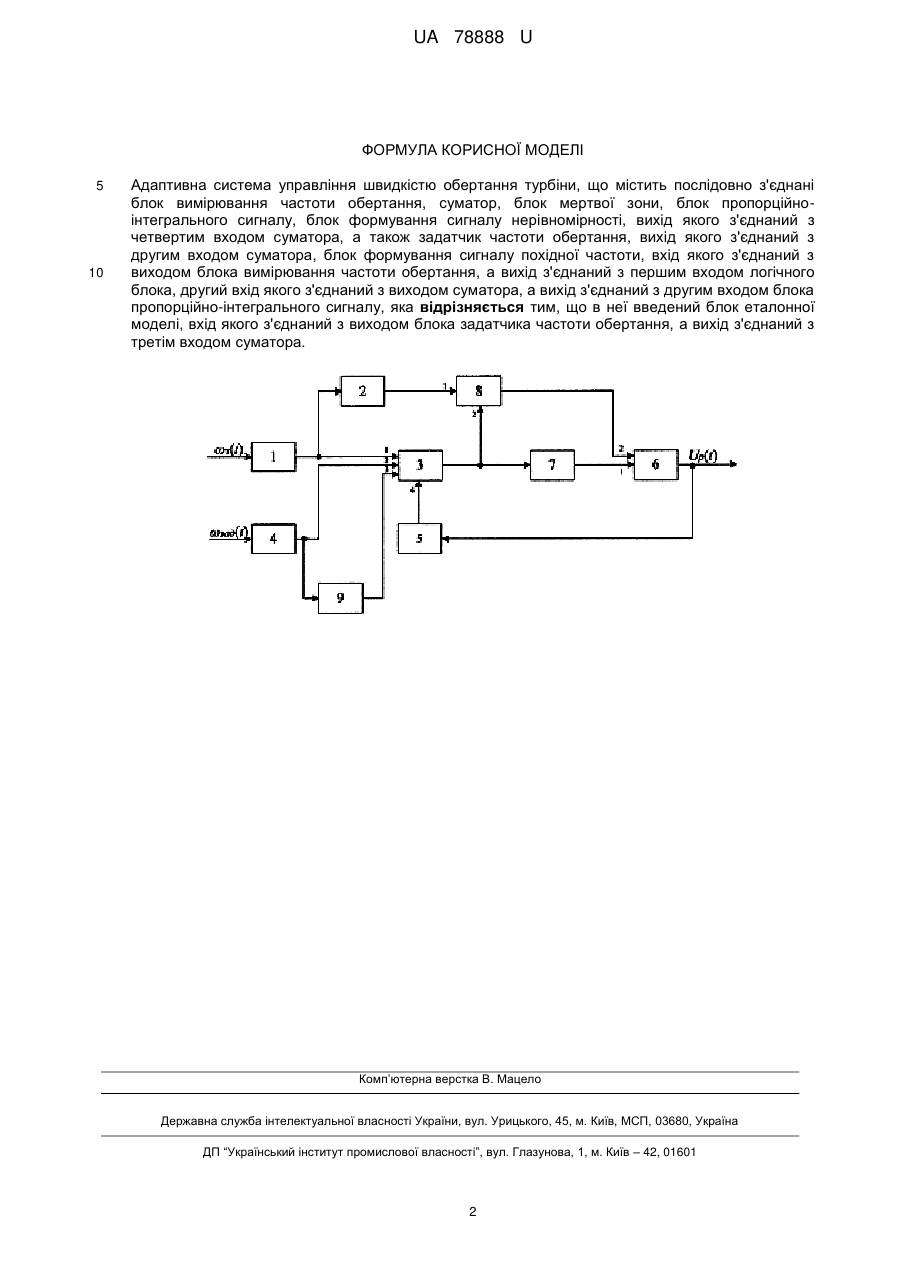
Реферат: UA 78888 U UA 78888 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до енергетики і може бути використана в теплових енергогенеруючих станціях. Найбільш близькою до запропонованої є система, взята за прототип, що містить блок вимірювання частоти обертання, з'єднаний з входом блока формування сигналу похідної частоти та першим входом суматора, другий та третій входи якого з'єднані відповідно з задатчиком частоти та з виходом блока формування сигналу нерівномірності, блок пропорційноінтегрального сигналу, з'єднаний виходом з входом блока формування сигналу нерівномірності, та блок мертвої зони, а також логічний блок, який з'єднаний входами з виходами суматора та блока формування сигналу похідної частоти, а виходом - з першим входом блока пропорційноінтегрального сигналу, другий вхід якого з'єднаний через блок мертвої зони з виходом суматора [А.с. SU № 1337546 А1 МПК F03В15/06. Регулятор частоти обертання гідротурбіни. Г.С. Киселев та І.І. Ляткер, заявл. 28.10.85, опубл. 15.09.1987, бюл. № 34]. Недоліком цієї системи є те, що недостатньо забезпечується працездатність та якість перехідних процесів системи управління. Задачею корисної моделі є забезпечення працездатності системи управління, необхідної точності, швидкодії та інших показників якості управління. Поставлена задача вирішується тим, що в систему, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом блока вимірювання частоти обертання, а вихід з'єднаний з першим входом логічного блока, другий вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з другим входом блока пропорційно-інтегрального сигналу, згідно з корисною моделлю, введений блок еталонної моделі, вхід якого з'єднаний з виходом блока задатчика частоти обертання, а вихід з'єднаний з третім входом суматора. Принцип дії запропонованої системи пояснюється блок-схемою, показаною на кресленні. До адаптивної системи управління швидкістю обертання турбіни входять: блок вимірювання частоти обертання 1, з'єднаний з входом блока формування сигналу похідної частоти 2 та з першим входом суматора 3, другий та третій входи якого з'єднані відповідно з виходом задатчика частоти 4 та з виходом блока еталонної моделі 9, четвертий вхід суматора 3 з'єднаний з виходом блока формування сигналу нерівномірності 5, вхід якого з'єднаний з виходом блока пропорційно-інтегрального сигналу 6, логічний блок 8, входи якого з'єднані з виходами суматора 3 та блока формування сигналу похідної частоти 2, а вихід - з другим входом блока пропорційно-інтегрального сигналу 6, перший вхід якого з'єднаний через блок мертвої зони 7 з виходом суматора 3. Адаптивна система управління швидкістю обертання турбіни працює таким чином. Поточне значення частоти обертання турбіни t(t), вимірюване в блоці вимірювання частоти обертання 1, порівнюється з заданою в блоці задатчика частоти 4 уставкою частоти зад(t) і сигналом, сформованим в блоці формування сигналу нерівномірності 5. Сигнал порівняння ∆x(t) з виходу суматора 3 надходить на вхід блока мертвої зони 7 та логічний блок 8. Розмір мертвої зони Z приймається менше уставки (t) логічного блока. При ∆x(t)(t) пропускає сигнал похідної частоти від блока формування сигналу похідної частоти 2 на вхід блока пропорційно-інтегрального сигналу 6, чим досягається пропорційно-інтегрально-диференційна дія системи. Блок еталонної моделі 9 являє собою RC-ланцюг, який реалізує бажану передавальну функцію замкненої системи автоматичного управління швидкістю обертання турбіни, передає на третій вхід суматора 3 сигнал, що відповідає еталонній поведінці замкненої системи. Таким чином, запропонована система забезпечує працездатність системи управління, необхідну точність, швидкодію та інші показники якості управління. 1 UA 78888 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційноінтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом блока вимірювання частоти обертання, а вихід з'єднаний з першим входом логічного блока, другий вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з другим входом блока пропорційно-інтегрального сигналу, яка відрізняється тим, що в неї введений блок еталонної моделі, вхід якого з'єднаний з виходом блока задатчика частоти обертання, а вихід з'єднаний з третім входом суматора. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive system for controlling rotational speed of turbine
Автори англійськоюSymonov Volodymyr Fedorovych, Huseva Aliona Olehivna
Назва патенту російськоюАдаптивная система управления скоростью вращения турбины
Автори російськоюСимонов Владимир Федорович, Гусева Алена Олеговна
МПК / Мітки
МПК: F03B 15/00
Мітки: обертання, турбіни, управління, адаптивна, система, швидкістю
Код посилання
<a href="https://ua.patents.su/4-78888-adaptivna-sistema-upravlinnya-shvidkistyu-obertannya-turbini.html" target="_blank" rel="follow" title="База патентів України">Адаптивна система управління швидкістю обертання турбіни</a>
Відмовостійка система керування швидкістю обертання турбіни

Номер патенту: 76051
Опубліковано: 25.12.2012
Автори: Гармаш Денис Вікторович, Симонов Володимир Федорович
МПК: F03B 15/00
Мітки: відмовостійка, система, керування, швидкістю, обертання, турбіни
Формула / Реферат:
Відмовостійка система керування швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, перший блок формування сигналу нерівномірності та задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом блока вимірювання частоти обертання, а вихід...
Адаптивна нелінійна система управління
Номер патенту: 44723
Опубліковано: 12.10.2009
Автори: Дибська Ирина Юріївна, Бандура Іван Миколайович, Шпак Ганна Сергіївна
МПК: G05B 13/00
Мітки: адаптивна, нелінійна, управління, система
Формула / Реферат:
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора, вихід якого з'єднаний через регулятор з входом об'єкта управління, вихід якого підключений до першого входу першого...
Адаптивна система управління
Номер патенту: 11808
Опубліковано: 16.01.2006
Автори: Рудико Оксана Вікторівна, Симонов Володимир Федорович, Бандура Іван Миколайович, Шемшур Микола Володимирович
МПК: G05B 13/00
Мітки: система, управління, адаптивна
Формула / Реферат:
1. Адаптивна система управління, що містить перший блок інтеграторів, перший блок підсилювачів, об'єкт управління, другий блок інтеграторів, яка відрізняється тим, що в систему введено обчислювач, з'єднаний з виходом пристрою узгодження через блок аналого-цифрових перетворювачів та з входом другого блока інтеграторів через блок цифро-аналогових перетворювачів.2. Адаптивна система управління за п. 1, яка відрізняється тим, що пристрій...
Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Амеліна Ірина Вікторівна
МПК: G05D 1/03, B64C 13/00
Мітки: безпілотного, кутової, апарата, літального, система, стабілізації, адаптивна
Формула / Реферат:
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу,...
Спосіб управління кутовою швидкістю обертання вала приводу плунжера паливного насоса
Номер патенту: 49949
Опубліковано: 15.10.2002
Автори: Грігор`єв Олександр Львович, Король Сергій Олександрович
МПК: F02M 39/00
Мітки: обертання, плунжера, управління, вала, кутовою, приводу, паливного, швидкістю, насоса, спосіб
Формула / Реферат:
1. Спосіб управління кутовою швидкістю обертання вала приводу плунжера паливного насоса, при якому передають обертання від вала дизеля з встановленим рівномірним або нерівномірним чергуванням моментів початку подачі палива в циліндри до вала приводу плунжера паливного насоса з розмежованими у часі періодами робочого ходу плунжерів і для кожного проміжку часу між послідовними моментами початку подачі палива підтримують постійним для всіх...
Попередній патент: Спосіб розповсюдження реклами
Наступний патент: Модифікована гідрофобно-бітумна ванна
Випадковий патент: Пристрій для вимірювання електричного опору біологічної рідини