Система збору та обробки даних
Номер патенту: 86205
Опубліковано: 10.04.2009
Автори: Яценко Станіслав Якович, Круглов Анатолій Лук'янович, Ковінько Микола Михайлович
Формула / Реферат
Система збору та обробки даних, що містить n вимірювальних датчиків та n підсилювачів, з'єднаних входами з виходами відповідних датчиків, комутатор та блок керування, сполучений першим виходом з керуючим входом комутатора, електронно-обчислювальну машину, аналого-цифровий перетворювач та блок пам'яті масиву прийнятої інформації, підключений входом до виходу аналого-цифрового перетворювача, яка відрізняється тим, що у неї введені n інвертуючих підсилювачів, диференційний підсилювач та послідовно з'єднані формувач різниці, підсилювач різниці, блок пам'яті різниці, формувач суми, керуючі входи кожного з яких підключені відповідно до другого, третього, четвертого та п'ятого виходів блока керування, вхід якого приєднано до виходу електронно-обчислювальної машини, що сполучена входом з виходом формувача суми, шостий та сьомий виходи блока керування підключені до керуючих входів відповідно аналого-цифрового перетворювача та блока пам'яті масиву прийнятої інформації, що з'єднаний виходом з входом формувача різниці, диференційний підсилювач приєднано виходом до входу аналого-цифрового перетворювача, а входами - відповідно до першого і другого виходів комутатора, виходи однойменних підсилювачів та інвертуючих підсилювачів, які підключені входами до виходів відповідних підсилювачів, приєднані попарно до відповідних входів комутатора, що виконаний як диференційний.
Текст
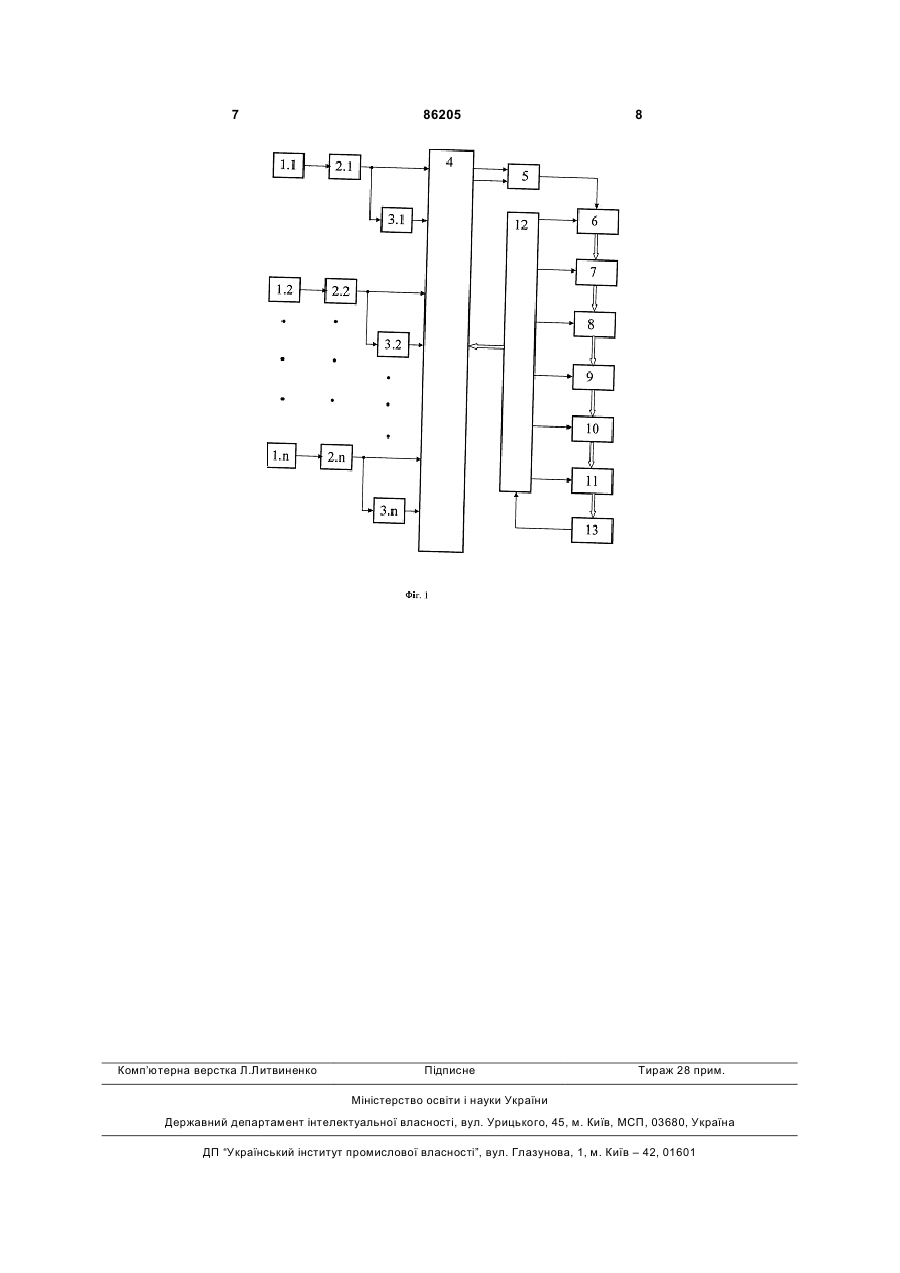
Система збору та обробки даних, що містить n вимірювальних датчиків та n підсилювачів, з'єднаних входами з виходами відповідних датчиків, комутатор та блок керування, сполучений першим виходом з керуючим входом комутатора, елект C2 2 (19) 1 3 підключено до входів підсилювачів, АЦП з'єднаний з входом блока пам'яті масиву прийнятої інформації, блок керування з'єднаний з керуючим входом комутатора. Крім того відомий пристрій містить блок регістра результату, формувач інформації, яка передається, вузол передачі даних в лінію, канал вводу-виводу, канал керування опитуванням, дешифратор, регістр рівня запуску, цифроаналоговий перетворювач, компаратор. Відомий пристрій має наступні недоліки: - недостатню точність перетворювання інформації за рахунок відсутності можливості компенсації розкиду параметрів датчиків; - недостатню точність із-за наявності напруги зміщення на виходах датчиків, підсилювачів і дрейфу цієї напруги у часі та відсутності можливості їх компенсувати, а також із-за відсутності можливості компенсації похибки, яку вносить комутатор; - відсутність можливості компенсації перешкод, які виникають при роботі пристрою; - низьку роздільну здатність пристрою. В основу винаходу поставлено задачу створити таку систему збору та обробки інформації, в якій уведення n інвертувальних підсилювачів, диференціального підсилювача, виконання комутатора диференціальним, а також уведення формувача різниці, блоку пам'яті різниці, підсилювача різниці і формувача суми дозволило б компенсувати похибку комутації та розкид параметрів датчиків, компенсувати напругу зміщення підсилювачів, АЦП і її дрейф у часі, а також зменшити перешкоди, які виникають при роботі системи і, таким чином, підвищити її точність та роздільну здатність. Задача, яку поставлено, вирішується так, що у систему збору та обробки даних, що містить n вимірювальних датчиків та n підсилювачів, з'єднаних входами з виходами відповідних датчиків, комутатор та блок керування, сполучений першим виходом з керуючим входом комутатора, електроннообчислювальну машину, аналого-цифровий перетворювач та блок пам'яті масиву прийнятої інформації, підключений входом до виходу аналогоцифрового перетворювача, згідно з винаходом, уведені наступні суттєві ознаки, відмінні від прототипу. У систему збору та обробки даних уведені n інвертувальних підсилювачів, диференціальний підсилювач та послідовно з'єднані формувач різниці, підсилювач різниці, блок пам'яті різниці, формувач суми, керуючі входи кожного з яких підключені відповідно до другого, третього, четвертого та п'ятого виходів блока керування, вхід якого приєднано до виходу електронно-обчислювальної машини, що сполучена входом з виходом формувача суми. Шостий та сьомий виходи блока керування підключені до керуючих входів відповідно аналогоцифрового перетворювача та блока пам'яті масиву прийнятої інформації, що з'єднаний виходом з входом формувача різниці. Диференціальний підсилювач приєднано виходом до входу аналогоцифрового перетворювача, а входами - відповідно до першого і другого виходів комутатора. Виходи однойменних підсилювачів та інвертувальних під 86205 4 силювачів, які підключені входами до виходів відповідних підсилювачів, приєднані попарно до відповідних входів комутатора. Комутатор, виконаний диференціальним. Уведення інвертувальних підсилювачів, диференціального підсилювача та виконання комутатора диференціальним дозволило подавати на вхід комутатора різнополярні сигнали і отримувати різницю цих сигналів на виході диференціального підсилювача і тим самим компенсувати похибку, яку вносить комутатор, що підвищує точність системи. Уведення формувача різниці дозволило: - компенсувати розкид параметрів датчиків; - компенсувати напругу зміщення датчиків, підсилювачів, АЦП і виключити дрейф її у часі; - компенсувати перешкоди, які виникають при роботі системи. Уведення підсилювача різниці дозволило підвищити роздільну здатність датчиків і системи у цілому. Уведення блока пам'яті різниці і формувача суми дозволило відновити рівень вхідних сигналів датчиків, пронормувати їх і підвищити точність системи у цілому. На Фіг.1 наведена функціональна схема системи збору та обробки даних. Система містить n датчиків 1.1...1n, n підсилювачів 2.1...2.n, n інвертувальних підсилювачів 3.1...3.n, диференціальний комутатор 4 послідовно з'єднані диференціальний підсилювач 5, аналогоцифровий перетворювач 6, блок 7 пам'яті масиву прийнятої інформації, формувач 8 різниці, підсилювач 9 різниці, блок 10 пам'яті різниці, формувач 11 суми, блок 12 керування, електронна обчислювальна машина 13. Виходи датчиків 1.1...1.n через відповідні підсилювачі 2.1...2.n підключено до входу відповідних диференціальних підсилювачів 3.1...3.n, виходи яких попарно з виходами однойменних підсилювачів 2 приєднані до відповідних входів комутатора 4. Керуючий вхід комутатора 4 з'єднаний з першим виходом блока 1 керування, другий, третій, четвертий, п'ятий, шостий, сьомий виходи якого приєднані до керуючих входів відповідно блоків 8, 9, 10, 11, 6, 7. Виходи комутатора 4 підключені відповідно до 1, 2 входів підсилювача 5, а вихід електронно-обчислювальної машини 13 до входу блока 12 керування. Інвертувальні підсилювачі 3, диференціальні підсилювачі 5 можуть бути виконані на операційних підсилювачах. Диференціальний комутатор 4 може бути виконаний, наприклад, на мікросхемі 561КП1. Система збору та обробки даних працює наступним чином. При включенні напруги живлення і за сигналом з ЕОМ, який надходить на блок 12 керування, послідовно відбувається підключення датчиків 1.1...1.n через підсилювачі 2.1...2.n, інвертувальні підсилювачі 3.1...3.n, через диференціальний комутатор 4 і диференціальний підсилювач 5 до входу АЦП 6. При цьому перше вимірювання сигналів з датчиків 1.1...1.n відбувається при відсутності впливу на них, а всі наступні під час впливу на датчики 1.1...1.n. АЦП 6 вимірює напругу, яка 5 пропорційна сигналам з датчиків 1.1...1.n. Ця інформація за сигналом з блока 12 керування запам'ятовується блоком 7 пам'яті масиву прийнятої інформації. Далі ця інформація надходить у формувач 8 різниці, де відбувається формування різниці між попереднім і наступним замірами по кожному датчику. Приклад обчислення значень різниці наведені нижче для датчика 1.1. ΔΝ1,1(0-1) = Ν1,1(0) -Ν1,1(1) (1) ΔΝ1,1(0-2) = Ν1,1(1) - Ν1,1(2) ΔΝ1,1(і-і+1) = Ν1,1(і) - Ν1,1(і+1) ××× ΔΝ1,1(0-1) - код різниці між нульовим заміром і першим; ΔΝ1,1(0-2) - код різниці між першим заміром і другим; ΔΝ1,1(і-і+1) - код різниці між і-заміром і і+1заміром. Обчислення для всіх інших датчиків проводиться аналогічно. Масив значень різниці замірів кодів надходить у підсилювачі 9 різниці і далі цей масив значень запам'ятовується в блоці 10 пам'яті, звідки за сигналом з блоку 12 керування надходить у формувач 11 суми, де одержане значення сигналів різниці послідовно сумується с попереднім значенням різниці сигналу. Вираз для суми кодів першого датчика має вигляд : SΝ1,1(1)= ΔΝ1,1(0-1) + ΔΝ1,1(1-2) SΝ1,1(2)= SΝ1,1(1) + ΔΝ1,1(2-3) ××× SΝ1,1(і)= SΝ1,1(і-1) + ΔΝ1,1[i-(i+1)] де SΝ1,1(1) - сума значень кодів різниць між нульовим і першим заміром і різниць між першим і другим заміром. SΝ1,1(2) - сума значень кодів першої суми і різницею між другим і третім заміром. SΝ1,1(і) - сума значень кодів і-го значення суми і різницею між і-тим і і+1 замірами. 86205 6 Вираз для суми кодів інших датчиків має аналогічний вигляд. Формувач 11 суми дозволяє відновити значення постійної складової в коді кожного заміру. Отриманий масив значень кодів передається в ЕОМ13, де формується відповідна таблиця (або малюнок). Блок 12 керування синхронізує роботу комутатора 4 і запуск АЦП 6, блока 7 пам'яті масиву інформації, формувача 8 різниці, підсилювача 9 різниці, блока 10 пам'яті різниці, формувача 11 суми. Таким чином уведення інвертувальних підсилювачів 3, диференціального комутатора 4, диференціального підсилювача 5 дозволило компенсувати у диференціальному підсилювачі 5 перешкоди, які виникають у комутаторі. Враховуючи те, що диференціальний комутатор 4 вносить однаковий рівень перешкоди по кожному каналу комутації, то при одержанні різниці на виході диференціального підсилювача 5, вони компенсуються. Уведення формувача 8 різниці дозволило компенсувати розкид параметрів датчиків, напругу зміщення АЦП6, датчиків 1, підсилювачів 2, 3 і перешкоди, які виникають при роботі системи. Розкид параметрів, напруга зміщення і її дрейф являють собою постійну складову в сигналі, тому при формуванні різниці вони компенсуються, що дозволяє підвищити точність. Уведення підсилювача 9 різниці дозволило одержати розрізнення між значеннями кодів і тим самим підняти розрізняючи можливість системи, що дозволило підвищити точність і якість відображення результатів на ЕОМ. Уведення формувача 11 суми дозволило відновити постійну складову в коді сигналів та провести нормування сигналів датчиків. Таким чином винахід, який заявляється, дозволяє підвищити точність, зменшити перешкоди і підняти розрізняючу можливість системи. 7 Комп’ютерна верстка Л.Литвиненко 86205 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of collecting and processing data
Автори англійськоюYatsenko Stanislav Yakovych, Kovinko Mykola Mykhailovych, Kruhlov Anatolii Lukianovych
Назва патенту російськоюСистема сбора и обработки данных
Автори російськоюЯценко Станислав Яковлевич, Ковинько Николай Михайлович, Круглов Анатолий Лукьянович
МПК / Мітки
МПК: G06F 17/40
Мітки: даних, система, обробки, збору
Код посилання
<a href="https://ua.patents.su/4-86205-sistema-zboru-ta-obrobki-danikh.html" target="_blank" rel="follow" title="База патентів України">Система збору та обробки даних</a>
Система збору та обробки даних
Номер патенту: 71673
Опубліковано: 15.12.2004
Автори: Рибалка Олександр Федорович, Єгоров Петро Миколайович
МПК: H03M 1/06, G06F 17/40
Мітки: система, збору, даних, обробки
Формула / Реферат:
Система збору та обробки даних, яка містить датчики і підсилювачі-перетворювачі за числом каналів збору даних, аналоговий комутатор, аналого-цифровий перетворювач та пристрій цифрової обробки, перший вихід кожного датчика підключено до першого входу відповідного підсилювача-перетворювача, другий вхід якого з’єднаний з шиною нульового потенціалу, вихід аналогового комутатора через аналого-цифровий перетворювач підключений до входу пристрою...
Інформаційно-аналітична система збору та обробки даних
Номер патенту: 22435
Опубліковано: 25.04.2007
Автори: Клименко Елла Сергіївна, Згуровський Михайло Захарович, Савастьянов Володимир Володимирович, Панкратова Наталія Дмитрівна, Радюк Андрій Миколайович, Будаєв Петро Володимирович
МПК: G06Q 10/00
Мітки: інформаційно-аналітична, обробки, система, даних, збору
Формула / Реферат:
1. Інформаційно-аналітична система збору та обробки даних, що містить пристрій введення даних за допомогою інтерфейсу, пристрій структуризації даних, пристрій керування послідовністю операцій, пристрій обробки даних, пристрій формування вихідних даних, яка відрізняється тим, що додатково містить пристрій збору та накопичення даних з можливістю отримання інформації як із заданих джерел, так і з джерел, перелік яких формується динамічно,...
Система для обміну даними між об’єктом керування та системою обробки даних
Номер патенту: 61852
Опубліковано: 17.11.2003
Автори: Симов'ян Саркіс Ваграмович, Шаповал Володимир Іванович, Попов Олександр Анатолійович, Угровецький Олег Петрович, Бандурка Олександр Маркович
МПК: H04M 11/04, G08B 25/00
Мітки: система, даними, даних, обробки, системою, обміну, об'єктом, керування
Формула / Реферат:
1. Система для обміну даними між об'єктом керування і системою обробки даних, що містить приймач вхідних сигналів, вхід якого сполучений з виходом об'єкта керування, а вихід - з центральним блоком керування, вихід якого сполучений по лінії зв'язку з передавачем, яка відрізняється тим, що центральний блок керування має другий вихід, підключений через приймач-передавач до другої лінії зв'язку, яка має середовище для передавання, інше ніж...
Автоматизована система збору даних про житлово-комунальні послуги
Номер патенту: 22928
Опубліковано: 25.04.2007
Автор: Волошко Анатолій Васильович
МПК: G06Q 50/00
Мітки: автоматизована, даних, послуги, житлово-комунальні, система, збору
Формула / Реферат:
1. Автоматизована система збору даних про житлово - комунальні послуги, яка складається з лічильника енергоресурсів, пристрою збору і видачі інформації, що містить пристрій накопичення інформації, радіомодем та сервера збору і обробки інформації, яка відрізняється тим, що пристрій збору і видачі інформації розташований всередині лічильника енергоресурсів або поряд в одному блоці з ним, причому лічильник оснащений число-імпульсним...
Електронний пристрій та система для обробки даних
Номер патенту: 46142
Опубліковано: 15.05.2002
Автор: Зедлак Хольгер
МПК: G06F 1/00, H04L 9/32, G06F 21/00, G06F 12/14, G07F 7/10
Мітки: система, обробки, даних, електронний, пристрій
Формула / Реферат:
1. Електронний пристрій для обробки даних, що міститьa) блок обробки (БО), через шину з'єднаний зі щонайменше одним запам'ятовуючим пристроєм (постійний ЗП, постійний ЗП з електричним перепрограмуванням; ROM, EEPROM),b) під'єднаний до блока обробки (БО) кодувальний вузол (KB),c) причому у запам'ятовуючому пристрої або у одному із запам'ятовуючих пристроїв (ROM, EEPROM) записано щонайменше один секретний ключ (Кл1, Кл2),...
Попередній патент: Сполуки бензімідазолону, які мають 5-нт4 рецепторну агоністичну активність
Наступний патент: Спосіб надлишкових вимірювань вологості паперу
Випадковий патент: Спосіб діагностики розвитку атеросклерозу