Пристрій для просторового вимірювання швидкості та напряму руху водного потоку
Номер патенту: 96242
Опубліковано: 10.10.2011
Автори: Бурачек Всеволод Германович, Гладких Ігор Іванович, Сємака Олексій Миколайович

Формула / Реферат
Пристрій для просторового вимірювання швидкості та напряму руху водного потоку відносно підводного апарата, що містить випромінювачі і приймачі ультразвукового випромінювання, електронні засоби обробки інформації, який відрізняється тим, що він має шість ультразвукових блоків: два випромінювачі і чотири приймачі, які установлені в трьох взаємно перпендикулярних площинах так, що у горизонтальній та вертикальній площині траєкторії ультразвукових променів утворюють квадрати і в кожному квадраті в робочому режимі випромінювачі та приймачі розміщені почергово, а також блок управління, блок розподілення і блок передачі даних, при цьому перший вихід блока управління електрично зв'язаний з першим входом блока обробки інформації, другий вихід блока управління електрично зв'язаний з входом блока розподілення, а вхід блока управління електрично зв'язаний з першим виходом блока обробки інформації; блок розподілення електрично зв'язаний з входами випромінювачів; виходи випромінювачів зв'язані з входами приймачів ультразвуковим зв'язком; приймачі електрично зв'язані з входом блока попереднього підсилення; вихід якого електрично зв'язаний з другим входом блока обробки інформації; другий вихід блока обробки інформації електрично зв'язаний з входами блока індикації та блока запису і збереження інформації, а третій вихід блока обробки інформації електрично зв'язаний з входом блока передачі даних.
Текст
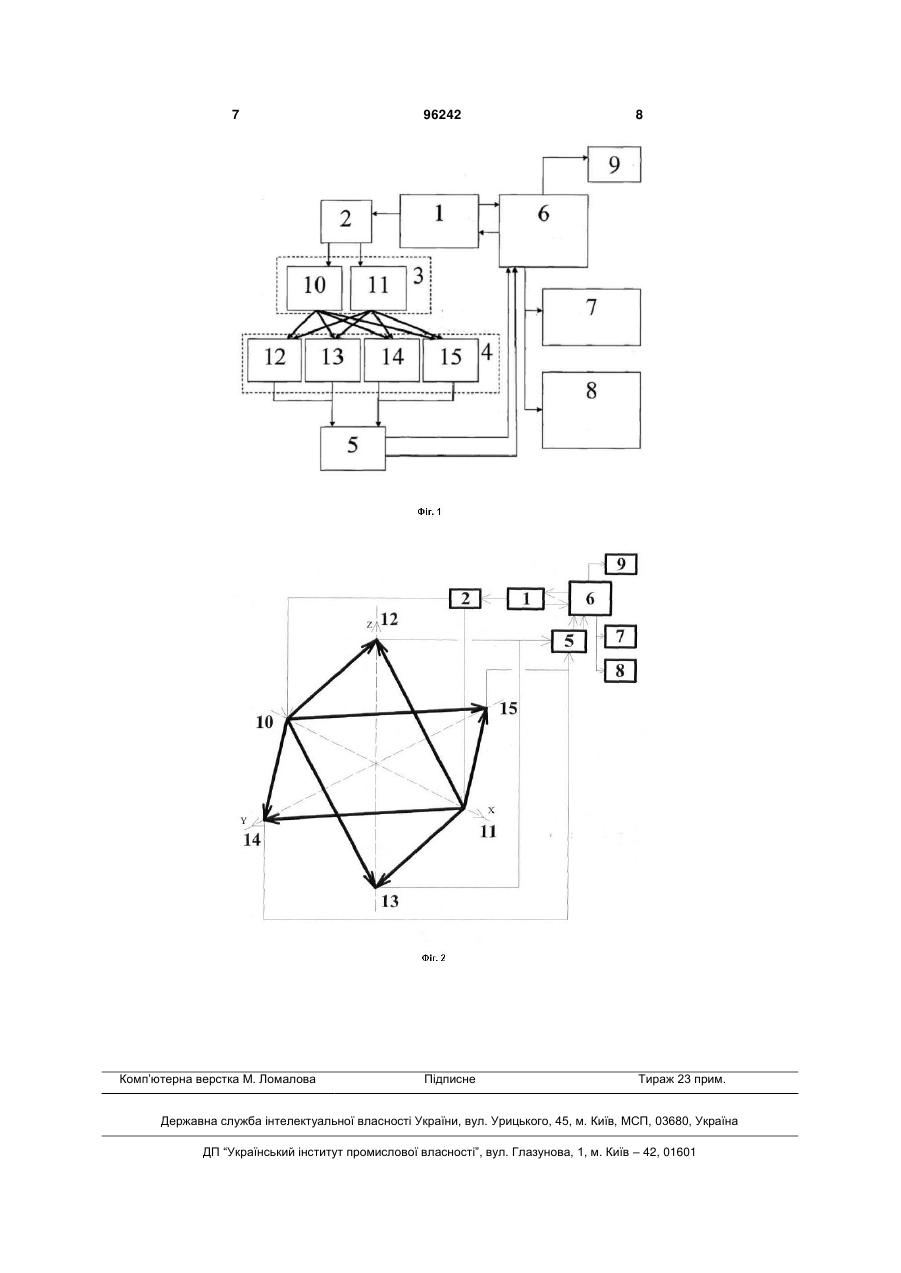
Пристрій для просторового вимірювання швидкості та напряму руху водного потоку відносно підводного апарата, що містить випромінювачі і приймачі ультразвукового випромінювання, електронні засоби обробки інформації, який відрізняється тим, що він має шість ультразвукових блоків: два випромінювачі і чотири приймачі, які C2 2 (19) 1 3 але для визначеності необхідне горизонтальне положення ультразвукового променя на одному рівні. Оскільки випромінювачі-приймачі ультразвукових сигналів встановлюються на берегових відкосах або свайних опорах, треба передбачити в опорних конструкціях можливість переміщення датчиків ультразвуку залежно від коливань рівня без порушення їх взаємного орієнтування. Внаслідок значних похибок від непаралельності площин розповсюдження ультразвукових променів з протилежних берегів і технічних ускладнень для усунення цих похибок, широкого застосування цей метод не знайшов [1]. Недоліком цього способу є визначення тільки швидкості течії. Найбільш близьким аналогом приладу, що пропонується, є ультразвукова установка для визначення швидкості та напрямку течії водного потоку описана в [3], яка містить два ультразвукових випромінювачі і два приймачі, розміщені на площині по горизонтальних лініях, які утворюють ромб, витягнутий за напрямком течії, при цьому напрями розповсюдження сигналів протилежні, а відстані між випромінювачами і приймачами - рівні. Випромінювачі і приймачі жорстко встановлені на спільній основі, що кріпиться на штанзі. Цей пристрій й вибрано за прототип. Недоліком цього пристрою є визначення швидкості та напрямку течії водяного потоку тільки в горизонтальній площині. Задачею винаходу є створення пристрою для вимірювання швидкості та напряму руху водного потоку в тривимірному просторі. Поставлена задача вирішується за рахунок створення пристрою для просторового вимірювання швидкості та напряму руху водного потоку відносно підводного апарата, що містить випромінювачі і приймачі ультразвукового випромінювання, електронні засоби обробки інформації, який відрізняється тим, що він має шість ультразвукових блоків: два випромінювачі і чотири приймачі, які установлені в трьох взаємно перпендикулярних площинах так, що у горизонтальній та вертикальній площині траєкторії ультразвукових променів утворюють квадрати і в кожному квадраті в робочому режимі випромінювачі та приймачі розміщені почергово, а також блок управління, блок розподілення і блок передачі даних, при цьому перший вихід блока управління електрично зв'язаний з першим входом блока обробки інформації, другий вихід блока управління електрично зв'язаний з входом блока розподілення, а вхід блока управління електрично зв'язаний з першим виходом блока обробки інформації; виходи блока розподілення електрично зв'язані з входами випромінювачів; виходи випромінювачів зв'язані з входами приймачів ультразвуковим зв'язком; виходи приймачів попарно електрично зв'язані з входами відповідних підсилювачів блока попереднього підсилення; виходи блока попереднього підсилення електрично зв'язані з другим і третім входом блока обробки інформації; другий вихід блока обробки інформації електрично зв'язаний з входами блоків індикації та запису і збереження даних відповідно, а третій вихід блока обробки інформації електрично зв'язаний з входом блока передачі даних. 96242 4 Технічним результатом є просторове вимірювання швидкості та напряму руху водного потоку з підвищеною точністю. Суть запропонованого винаходу пояснюється кресленням (Фіг. 1), на якому зображена - блоксхема пристрою для просторового вимірювання швидкості та напряму руху водного потоку (лініями зі стрілками показані електричні зв'язки, а жирними лініями зі стрілками - ультразвукові). Схема пристрою показана на Фіг. 1 і складається із електронного блока управління - 1; блока комутації (розподілення) 2; група випромінювачів 3; група - приймачів - 4; блока попереднього підсилення - 5; електронного блока обробки інформації - 6; блока індикації - 7, блока запису і збереження інформації - 8; блока передачі даних - 9. Група випромінювачів 3 містить ультразвукові генератори (позиція - 10, 11, розміщені на горизонтальній осі на Фіг. 2). Група приймачів 4 містить приймальні пристрої ПРУ (позиція - 12, 13, 14, 15, розміщені у вертикальній площині на Фіг. 2). Блок попереднього підсилення 5 містить чотири підсилювачі проміжної частоти для кожного приймача відповідно. Електронний блок обробки інформації 6 складається з допплерівського частотоміра, аналізатора. Пристрій встановлюється на зовнішній частині підводного апарата, усі його елементи розміщені в єдиному корпусі, крім блока індикації та блока запису і збереження інформації, при цьому п'єзоелектричні елементи жорстко зв'язані між собою. Пристрій працює наступним чином. Блок управління 1 задає необхідну частоту і керує електронним блоком обробки інформації 6, блок розподілення 2 посилає сигнали опорної частоти f0 для кожного ультразвукового генератора, які випромінюється у чотирьох напрямах попарно ультразвуковими генераторами 10, 11. Зареєстровані приймачами 12, 13, 14, 15 сигнали відрізняються від частоти f0 на величину f допплерівського зміщення, зумовленого впливом течії водного потоку, які попарно підсилюються блоком попереднього підсилення 5 і надходять до електронного блока обробки інформації 6, де відбувається виділення частоти f, яка пропорційна швидкості течії. Потім сигнали аналізуються та передаються в блок управління 1 і виводяться на блок індикації 7, відградуйовані в одиницях швидкості. Реєстрація відбувається в блоці запису і збереження інформації 8. Запропонований пристрій забезпечує вимірювання подвійної різниці фаз сигналів в повздовжньому та поперечних напрямках як в горизонтальній, так і в вертикальний площині для відповідних проекцій Pri вектора швидкості водного потоку, що дозволяє отримати підвищення точності вимірювання. Проекції направляючого вектора у відповідних площинах в системі координат XYZ (Фіг. 2) визначаються за формулами: PrXY a a x i a y J ; PrXZ a a x i a z k ; 5 96242 PrYX a a y J a z k , Сума проекцій буде рівна: Pr a 2 a x i a y J a z k 2a ; де a x i a x , a y J a y , a z k a z ; a x , a y , a z - координати вектора a ; i , J , k - одиничні вектори. Тоді вектор швидкості водного потоку Pri a . a 2 Просторове відхилення вектора швидкості вказує на напрямок водного потоку. Таким чином, запропоноване технічне рішення дозволяє одержати компактний пристрій для просторового вимірювання швидкості та напряму руху 6 водного потоку, відносно підводного апарата і підвищення точності вимірювання цього параметра безпосередньо у цифровому варіанті. Джерела інформації: 1. Карасѐв И.В. Гидрометрия: учебник / И.В. Карасев, А.В. Васильев, Е.С. Субботина. - Л.: Гидрометеоиздат, 1991. - С. 141-144. 2. Васильев А.В. Водно-технические изыскания / А.В. Васильев, С.В. Шмидт. - Л.: Гидрометеоиздат, 1970. - С. 111-112. 3. Пристрій для вимірювання швидкості та напряму течії водного потоку: Патент на винахід №77288, Україна, MПK (2006) G01p5/00, G01p13/00, G01в7/00/ Бурачек В.Г., Мамонтова Л.С, Скітер І.С. - №20041109032; Заявлено 05.11.2004; Опубл. 15.11.2006, Бюл. №11. - 1с. 7 Комп’ютерна верстка М. Ломалова 96242 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for spice-like measurement of velocity and direction of motion of water flow
Автори англійськоюBurachek Vsevolod Hermanovych, Hladkykh Ihor Ivanovych, Semaka Oleksii Mykolaiovych
Назва патенту російськоюУстройство для пространственного измерения скорости и направления движения водного потока
Автори російськоюБурачек Всеволод Германович, Гладких Игорь Иванович, Семака Алексей Николаевич
МПК / Мітки
МПК: G01P 5/00
Мітки: руху, вимірювання, пристрій, потоку, напряму, швидкості, просторового, водного
Код посилання
<a href="https://ua.patents.su/4-96242-pristrijj-dlya-prostorovogo-vimiryuvannya-shvidkosti-ta-napryamu-rukhu-vodnogo-potoku.html" target="_blank" rel="follow" title="База патентів України">Пристрій для просторового вимірювання швидкості та напряму руху водного потоку</a>
Пристрій для вимірювання швидкості та напряму течії водного потоку
Номер патенту: 77288
Опубліковано: 15.11.2006
Автори: Бурачек Всеволод Германович, Скітер Ігор Семенович, Мамонтова Людмила Степанівна
МПК: G01P 13/00, G01B 7/00, G01P 5/00
Мітки: потоку, швидкості, вимірювання, напряму, водного, течії, пристрій
Формула / Реферат:
1. Пристрій для вимірювання швидкості та напряму течії водного потоку, який має випромінювачі і приймачі ультразвукового випромінювання, який відрізняється тим, що два ультразвукових випромінювачі і два приймачі розміщені на горизонтальній площині та зв'язані між собою траєкторіями ультразвукового випромінювання, які утворюють чотирикутник з рівними сторонами, при цьому випромінювачі і приймачі розміщені по периметру чотирикутника...
Акустичний спосіб вимірювання швидкості та напряму потоку рідини або газу і пристрій для його здійснення (варіанти)
Номер патенту: 76062
Опубліковано: 15.06.2006
Автори: Гайський Павло Вітальович, Гайскій Віталій Олександрович, Греков Миколай Олександрович
МПК: G01S 15/00, G01P 5/00
Мітки: газу, напряму, здійснення, рідини, потоку, варіанти, пристрій, акустичний, вимірювання, спосіб, швидкості
Формула / Реферат:
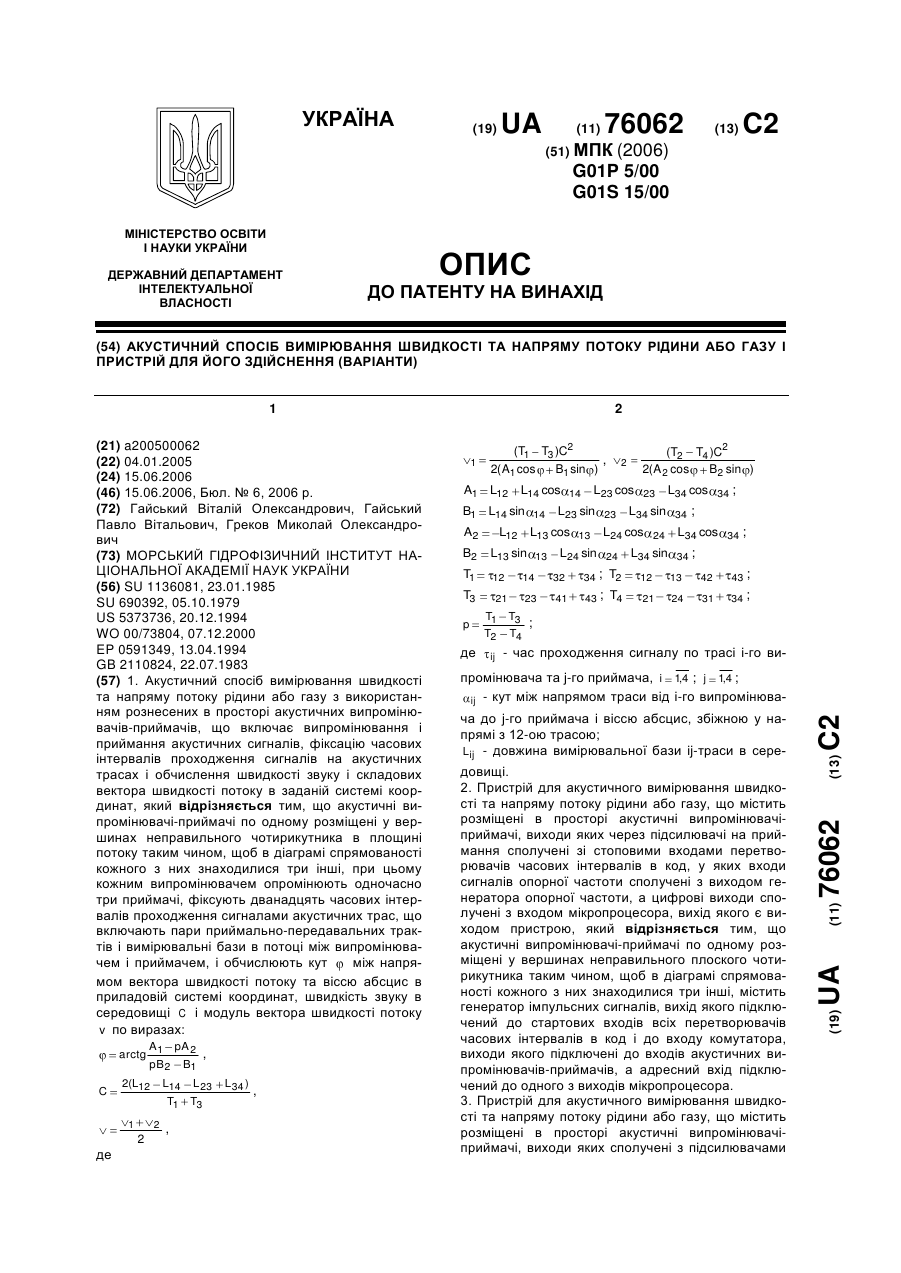
1. Акустичний спосіб вимірювання швидкості та напряму потоку рідини або газу з використанням рознесених в просторі акустичних випромінювачів-приймачів, що включає випромінювання і приймання акустичних сигналів, фіксацію часових інтервалів проходження сигналів на акустичних трасах і обчислення швидкості звуку і складових вектора швидкості потоку в заданій системі координат, який відрізняється тим, що акустичні випромінювачі-приймачі по одному...
Пристрій для вимірювання швидкості та напрямку газового потоку
Номер патенту: 23910
Опубліковано: 11.06.2007
Автори: Юкиш Марина Йосипівна, Гладишевський Володимир Романович, Юкиш Сергій Васильович, Білинський Йосип Йосипович
МПК: G01F 1/68
Мітки: газового, потоку, швидкості, пристрій, вимірювання, напрямку
Формула / Реферат:
Пристрій для вимірювання швидкості та напрямку газового потоку, який містить тепловізійний пристрій, що включає тепловізійну камеру, підключений до її виходу функціональний блок і відеоконтрольний пристрій, з'єднаний з першим виходом функціонального блока, обчислювальний пристрій, з'єднаний з другим виходом функціонального блока, і блок керування, один вихід якого підключений до функціонального блока, а другий - до обчислювального пристрою,...
Пристрій для регулювання швидкості і зміни напряму руху рудникових електровозів
Номер патенту: 21187
Опубліковано: 15.03.2007
Автори: Вакульчик Володимир Григорович, Чорножуков Марк Євгенович, Дебелий Володимир Леонідович, Добровольський Олександр Вячеславович, Мороз Сергій Валер'євич
МПК: G05D 13/00, G05D 1/00
Мітки: руху, пристрій, зміни, швидкості, рудникових, регулювання, електровозів, напряму
Формула / Реферат:
Пристрій для регулювання швидкості і зміни напряму руху рудникових електровозів, що містить тягові електродвигуни, пульт керування, реверсор, який відрізняється тим, що реверсор виконаний як силовий блок перемикання напряму руху, який складається з електронних силових безконтактних модулів, що встановлюється в рамі між тяговими електродвигунами і з'єднується з пультом керування, встановленим в кабіні машиніста контрольним провідником.
Пристрій для вимірювання швидкості та температури потоку
Номер патенту: 30477
Опубліковано: 15.11.2000
Автори: Івахів Орест Васильович, Шигера Ігор Юрійович
МПК: G01P 5/10
Мітки: потоку, швидкості, пристрій, вимірювання, температури
Формула / Реферат:
Пристрій для вимірювання швидкості та температури потоку, що містить високостабільний постійний резистор, з'єднаний нижнім виводом через перетворювач швидкості-температури з землею та виходом ключа, вхід керування якого з'єднано з виходом генератора опорної частоти, перший і другий підсилювачі змінного струму, відрізняється тим, що в нього додатково введено джерело змінного струму, джерело постійного струму, диференційний підсилювач,...
Попередній патент: Стробоскопічний спосіб реєстрації сигналів
Наступний патент: Установка для сушіння сипких харчових продуктів рослинного походження
Випадковий патент: Спосіб силосування зелених кормів