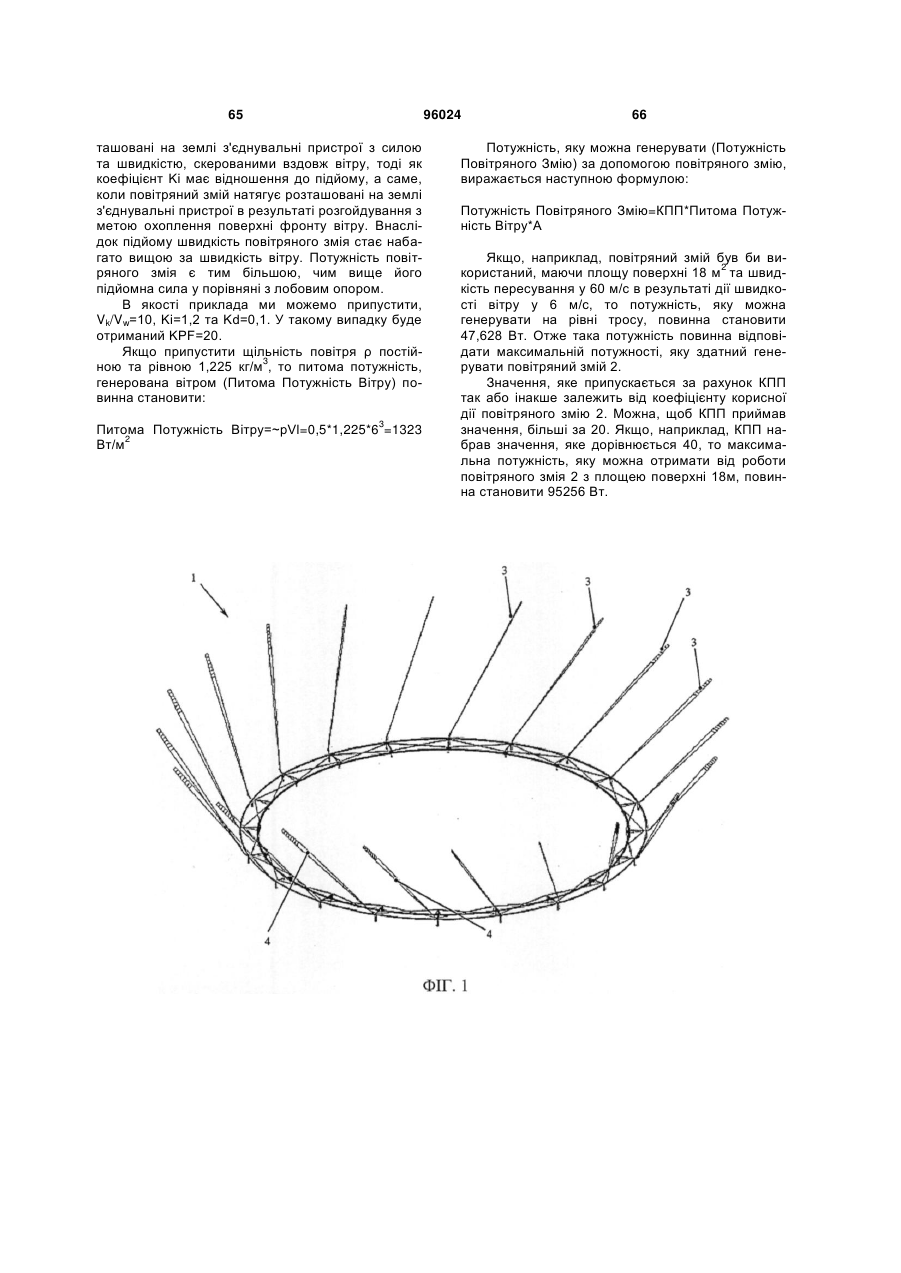
Система перетворення енергії вітру за допомогою поступального руху рейкових модулів, що приводяться в рух повітряними зміями, та спосіб виробництва електроенергії за допомогою такої системи





Формула / Реферат
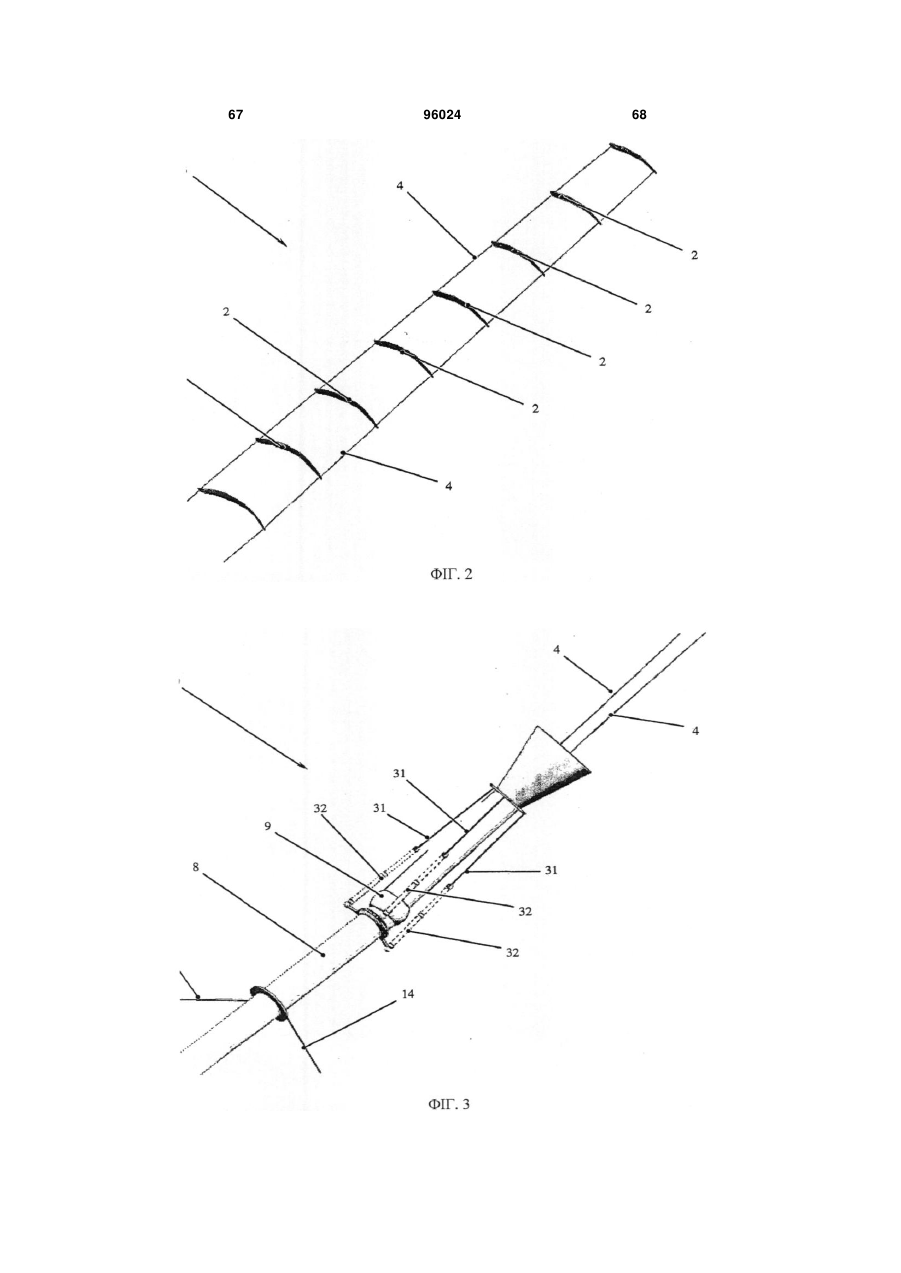
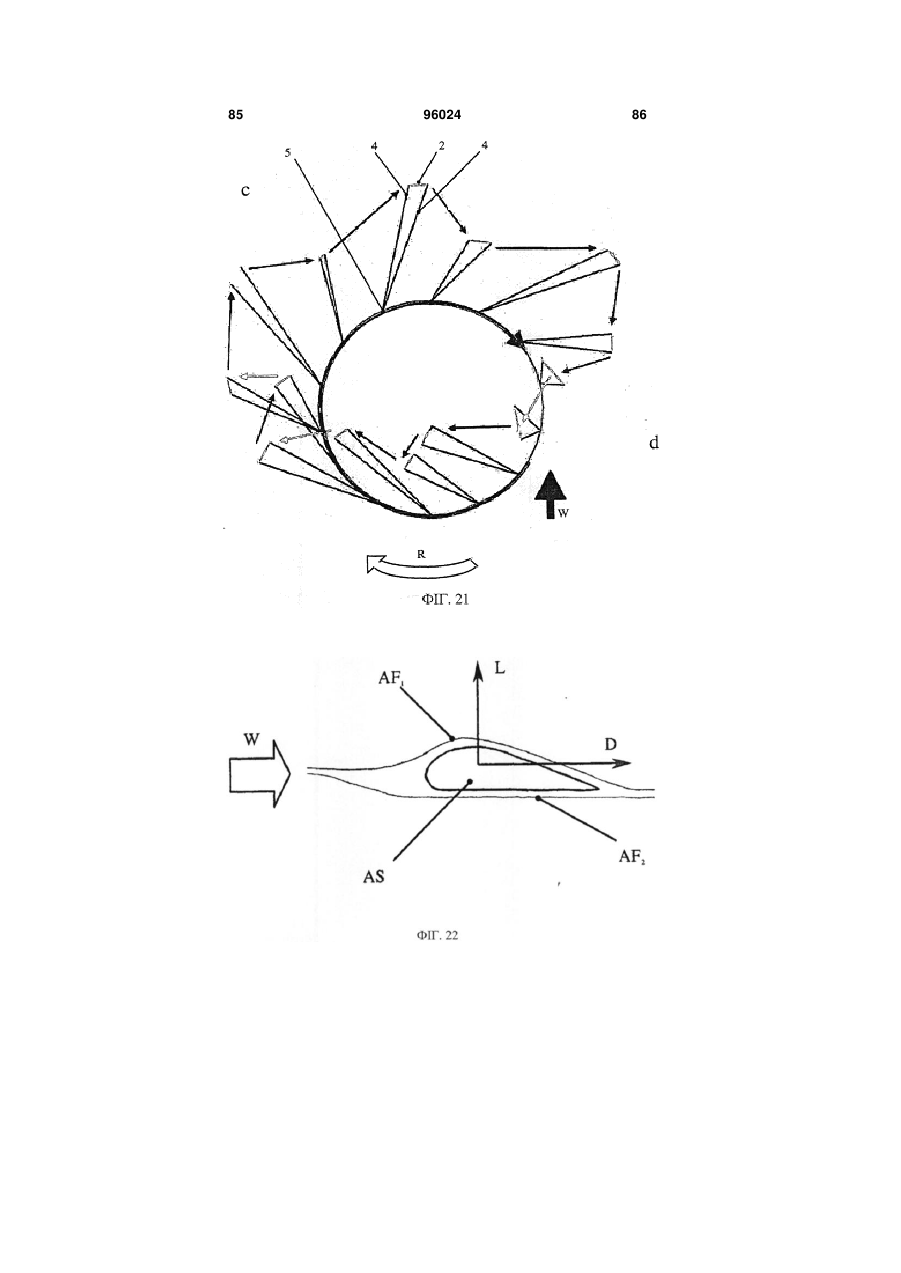
1. Система перетворення енергії вітру (1), яка відрізняється тим, що вона складається щонайменше з одного повітряного змія (2), пристосованого під керування з землі та зануреного щонайменше в один потік вітру (W), та щонайменше з одного модуля (5), пристосованого до поступального руху щонайменше по одній рейці (6, 7), розташованій біля землі, при цьому згаданий модуль (5) з'єднується за допомогою щонайменше одного троса (4) зі згаданим повітряним змієм (2), пристосованим під керування згаданим модулем (5) для протягування згаданого модуля (5) по згаданій рейці (6, 7) та для виконання згаданого перетворення енергії вітру в електричну за допомогою щонайменше однієї системи генерування, що взаємодіє зі згаданим модулем (5) та згаданою рейкою (6, 7), при цьому згаданий трос (4) пристосований як до передачі механічної енергії від згаданого повітряного змія (2) та до нього, так і для управління траєкторією польоту згаданого повітряного змія (2).
2. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані повітряні змії (2) пристосовані під керування таким чином, щоб тяга, викликана згаданим потоком вітру (W), була максимальною і не заважала згаданому поступальному руху згаданого модуля (5) по згаданій рейці (6).
3. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згаданий повітряний змій (2) пристосований під керування для виробництва сили тяги, адаптованої для здійснювання поступального руху згаданого модуля (5) по згаданій рейці (6) завжди для одного і того ж призначення.
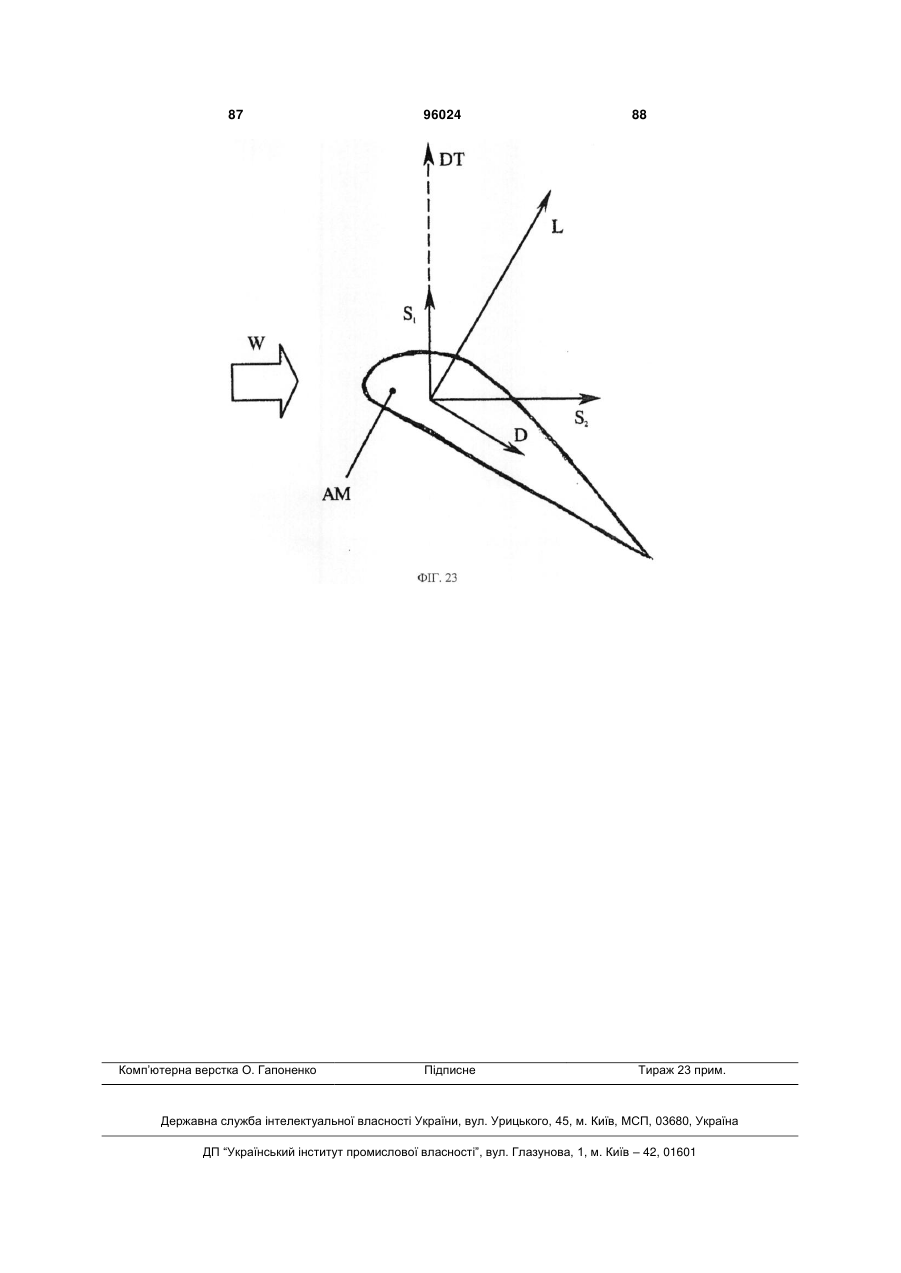
4. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що кут атаки згаданого повітряного змія (2) відносно згаданого потоку вітру (W) є таким, що згаданий повітряний змій (2) тягнеться догори або зависає.
5. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згаданий повітряний змій (2) виготовлений з гнучкого матеріалу.
6. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згаданий повітряний змій (2) виготовлений з напівжорсткого матеріалу.
7. Система перетворення енергії вітру (1) за п. 6, яка відрізняється тим, що згаданий повітряний змій (2) виготовлений з напівжорсткого матеріалу і обладнаний полегшеним каркасом.
8. Система перетворення енергії вітру (1) за п. 6, яка відрізняється тим, що згаданий повітряний змій (2), виготовлений з напівжорсткого матеріалу, має форму жорстких крил планера.
9. Система перетворення енергії вітру (1) за п. 6, яка відрізняється тим, що згаданий повітряний змій (2),виготовлений з напівжорсткого матеріалу, обладнаний ромбоподібними фігурами, виготовленими з полімеру.
10. Система перетворення енергії вітру (1) за п. 6, яка відрізняється тим, що згадана напівжорсткість згаданого повітряного змія (2) є асиметричною відносно двох розмірів згаданого повітряного змія (2) для збереження гнучкості по боках.
11. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що щонайменше два згадані повітряні змії (2) поєднуються послідовно у багатошарову конфігурацію для формування ланки (3), з'єднаної за допомогою щонайменше одного зі згаданих тросів (4) з одним зі згаданих модулів (5).
12. Система перетворення енергії вітру (1) за п. 11, яка відрізняється тим, що згадані троси (4), які об'єднують згадані повітряні змії (2) у згадану ланку (3), приєднуються до стінок згаданих повітряних зміїв (2).
13. Система перетворення енергії вітру (1) за п. 11, яка відрізняється тим, що згадані стінки згаданих повітряних зміїв (2) згаданої ланки (3) є з'єднувальним елементом між згаданими повітряними зміями (2).
14. Система перетворення енергії вітру (1) за п. 13, яка відрізняється тим, що згадані стінки мають ділянку аеродинамічної поверхні.
15. Система перетворення енергії вітру (1) за п. 11, яка відрізняється тим, що згадані повітряні змії (2) у згаданій ланці (3) мають форму дуги, по якій згадані стінки простираються для приєднання до інших згаданих повітряних зміїв (2).
16. Система перетворення енергії вітру (1) за п. 11, яка відрізняється тим, що згадані повітряні змії (2) у згаданій ланці (3) мають форму плоского крила з однією або двома згаданими з'єднувальними стінками.
17. Система перетворення енергії вітру (1) за п. 11, яка відрізняється тим, що згадані повітряні змії (2) у згаданій ланці (3) мають розміри, відмінні один від одного.
18. Система перетворення енергії вітру (1) за п. 17, яка відрізняється тим, що згадані повітряні змії (2), розташовані якнайближче до згаданого модуля (5), мають більшу площу, а розміри згаданих повітряних зміїв (2) зменшуються пропорційно віддаленню від згаданого модуля (5).
19. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що переріз згаданого троса (4) є змінним.
20 . Система перетворення енергії вітру (1) за п. 19, яка відрізняється тим, що згаданий трос (4) має менший переріз поруч зі згаданим повітряним змієм (2) і більший переріз поруч зі згаданим модулем (5).
21. Система перетворення енергії вітру (1) за п. 19, яка відрізняється тим, що змінювання згаданого перерізу згаданого троса (4) є безперервним.
22. Система перетворення енергії вітру (1) за п. 19, яка відрізняється тим, що зміна згаданого перерізу згаданого троса (4) здійснюється крок за кроком зі зміщеннями.
23. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що сегмент довжини згаданого троса, розташованого якнайближче до згаданого повітряного змія (2), моделюється з урахуванням аеродинаміки для забезпечення асиметричного підйому угору.
24. Система перетворення енергії вітру (1) за п. 23, яка відрізняється тим, що згаданий трос (4) покритий обшивкою з матеріалу, отриманого за допомогою екструзії, із зіркоподібним перерізом.
25. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що включає інтелектуальну систему управління, що пристосована для автоматичного керування згаданим повітряним змієм (2) вздовж згаданої траєкторії польоту.
26. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що включає систему живлення, яка взаємодіє зі згаданою інтелектуальною системою управління для керування акумулюванням та постачанням згаданої електроенергії.
27. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана інтелектуальна система управління обладнана набором датчиків, розташованих на згаданому повітряному змії (2).
28. Система перетворення енергії вітру (1) за п. 27, яка відрізняється тим, що згадані датчики, розташовані на згаданому повітряному змії (2), мають автономне живлення.
29. Система перетворення енергії вітру (1) за п. 27, яка відрізняється тим, що згадані датчики, розташовані на згаданому повітряному змії (2), пересилають інформацію у бездротовому режимі до розташованих на землі компонентів інтелектуальної системи управління.
30. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана інтелектуальна система управління обладнана набором розташованих на землі датчиків.
31. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані повітряні змії (2) обладнані системою запуску та стабілізації для виконання маневру бокового ковзання.
32. Система перетворення енергії вітру (1) за п. 31, яка відрізняється тим, що згадана система запуску та стабілізації складається щонайменше з одного інтерцептора.
33. Система перетворення енергії вітру (1) за п. 32, яка відрізняється тим, що згаданий інтерцептор приводиться у дію за допомогою систем з автономним живленням.
34. Система перетворення енергії вітру (1) за п. 33, яка відрізняється тим, що згаданий інтерцептор приводиться у дію за допомогою систем, які живляться через щонайменше один кабель, який від згаданого модуля (5) досягає згаданого повітряного змія (2).
35. Система перетворення енергії вітру (1) за п. 34, яка відрізняється тим, що згадані системи, які приводять у дію згаданий інтерцептор, є п'єзоелектричними.
36. Система перетворення енергії вітру (1) за п. 34, яка відрізняється тим, що згадані системи, які приводять у дію згаданий інтерцептор, містять полімери з ефектом запам'ятовування форми.
37. Система перетворення енергії вітру (1) за п. 34, яка відрізняється тим, що згадані системи, які приводять у дію згаданий інтерцептор, містять волокна, виготовлені зі сплавів з пам'яттю форми.
38. Система перетворення енергії вітру (1) за п. 34, яка відрізняється тим, що згадані системи, які приводять у дію згаданий інтерцептор, отримують від згаданої інтелектуальної системи управління команди у бездротовому режимі.
39. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадана система запуску та стабілізації для виконання згаданого маневру бокового ковзання має щонайменше одну спрямовану повітряну камеру плавучості.
40. Система перетворення енергії вітру (1) за п. 39, яка відрізняється тим, що згадані спрямовані повітряні камери плавучості скеровані у поперечному напрямку до напрямку поштовхів згаданого потоку вітру (W) на згаданий повітряний змій (2) та є такими, що гнучко прибираються для усунення зміни коефіцієнта корисної дії згаданого повітряного змія (2).
41. Система перетворення енергії вітру (1) за п. 39, яка відрізняється тим, що упродовж виконання згаданого маневру бокового ковзання згадані спрямовані повітряні камери плавучості підіймаються під дією потоку.
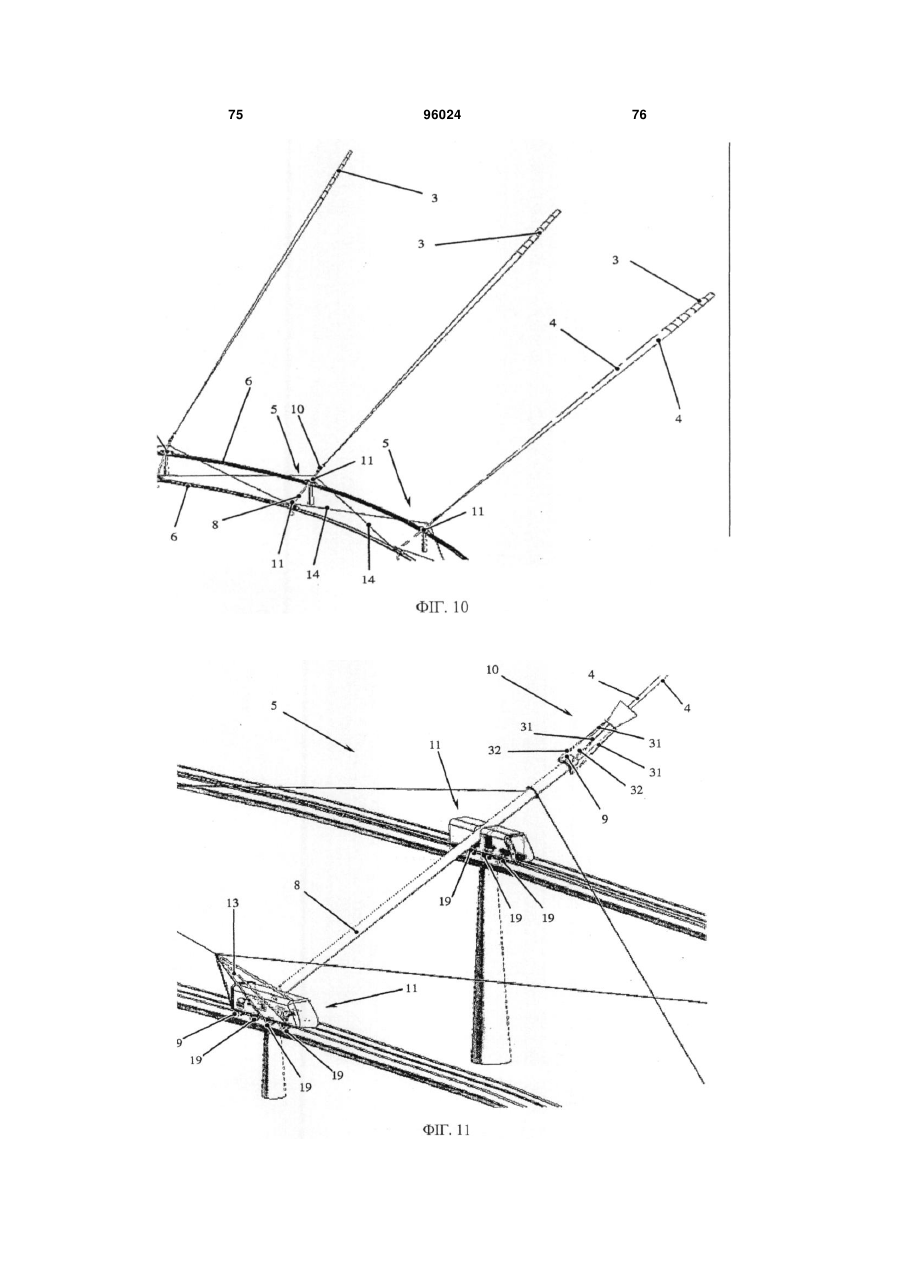
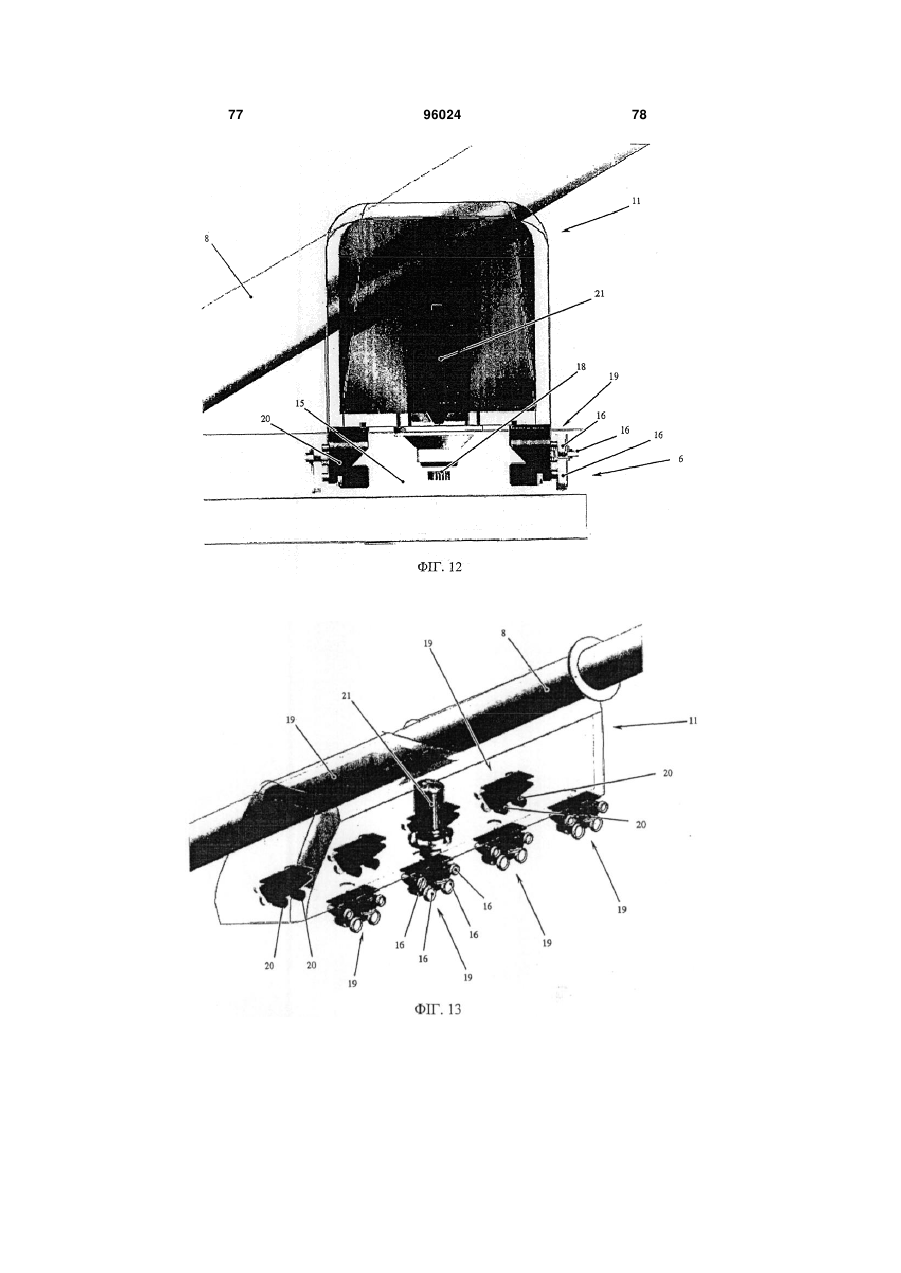
42. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згаданий модуль (5) обладнаний щонайменше одним роликовим струмознімачем (11) для поступального руху вздовж згаданої рейки (6; 7).
43. Система перетворення енергії вітру за п. 42, яка відрізняється тим, що згаданий роликовий струмознімач (11) має аеродинамічну форму.
44. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що на згаданому роликовому струмознімачі (11) встановлені компоненти для керування рухом згаданого повітряного змія (2) та для зберігання згаданих тросів (4).
45. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що на згаданому роликовому струмознімачі (11) встановлені компоненти для перетворення енергії.
46. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6) встановлені на різних висотах.
47. Система перетворення енергії вітру (1) за п. 46, яка відрізняється тим, що щонайменше одна зі згаданих рейок (6, 7) розташована на меншій висоті відносно щонайменше однієї якнайдалі зовнішньо розташованої зі згаданих рейок (6; 7) і на більшій висоті відносно щонайменше однієї якнайдалі усередину розташованої зі згаданих рейок (6; 7).
48. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що кожен зі згаданих модулів (5) обладнаний двома згаданими роликовими струмознімачами (11), які поступально рухаються по згаданих рейках (6), розташованих на різних висотах.
49. Система перетворення енергії вітру (1) за п. 44 або 48, яка відрізняється тим, що на згаданому роликовому струмознімачі (11), який поступально рухається по згаданій рейці (6), розташованій на меншій висоті, встановлені згадані компоненти для керування рухом згаданого повітряного змія (2) та для зберігання згаданих тросів (4).
50. Система перетворення енергії вітру (1) за п. 45 або 48, яка відрізняється тим, що на згаданому роликовому струмознімачі (11), який поступально рухається по згаданій рейці (6), розташованій на більшій висоті, встановлені згадані компоненти для перетворення енергії.
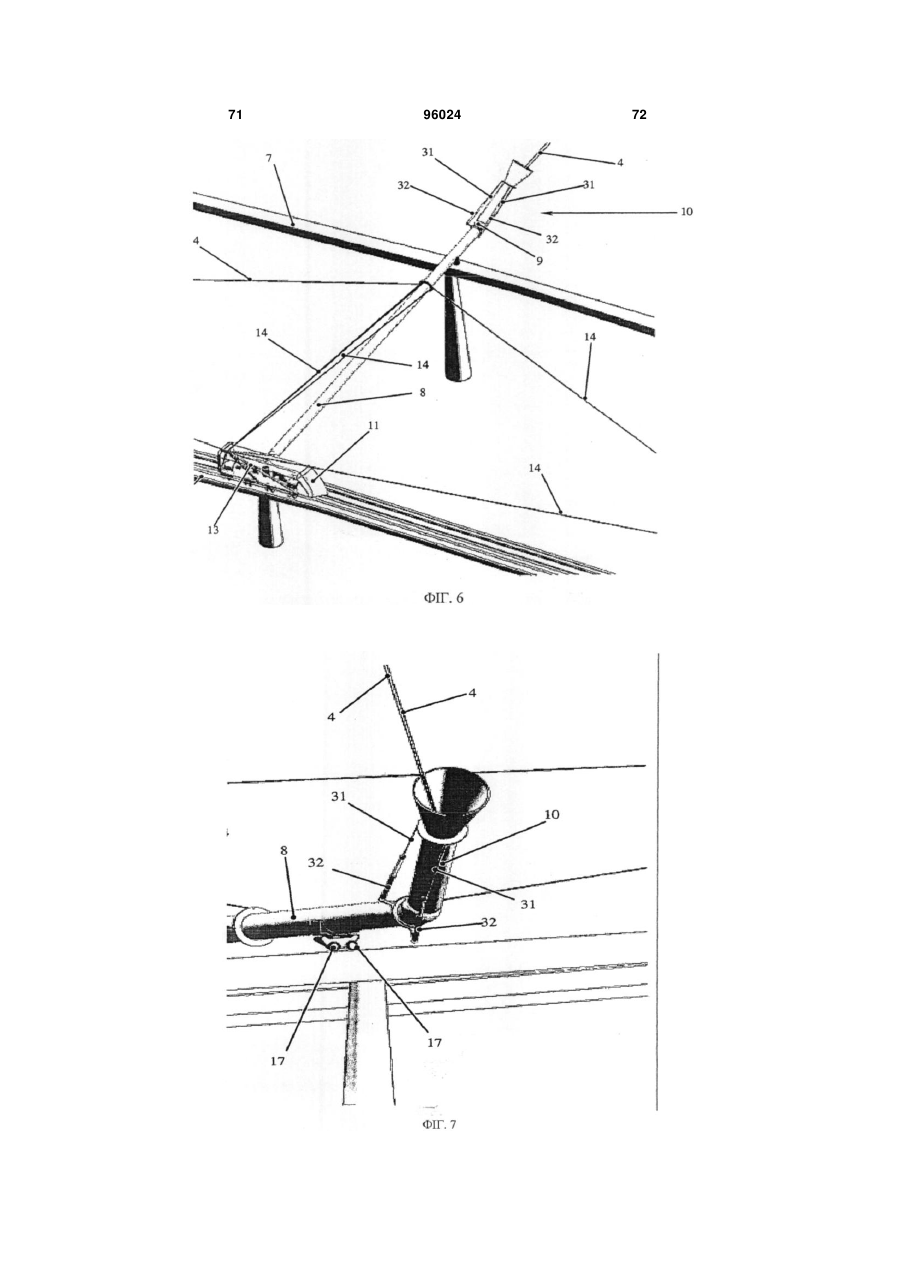
51. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що складається щонайменше з однієї системи повернення (8) згаданого повітряного змія (2) у вихідне положення.
52. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, щозгадана система повернення у вихідне положення (8) нахилена стосовно землі.
53. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) з'єднана зі згаданим роликовим струмознімачем (11), розташованим біля щонайменше її однієї кінцевої частини.
54. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) з'єднана зі згаданим роликовим струмознімачем (11), який поступально рухається на більшій висоті біля кінцевої частини згаданої системи повернення у вихідне положення (8), від якої згадані троси (4) простираються до згаданого повітряного змія (2).
55. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) з'єднана зі згаданим роликовим струмознімачем (11), який поступально рухається на меншій висоті біля кінцевої частини згаданої системи повернення у вихідне положення (8), від якої згадані троси (4) простираються до згаданого повітряного змія (2).
56. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) обладнана амортизованими колесами (17), які поступально рухаються щонайменше по одній рейці (7).
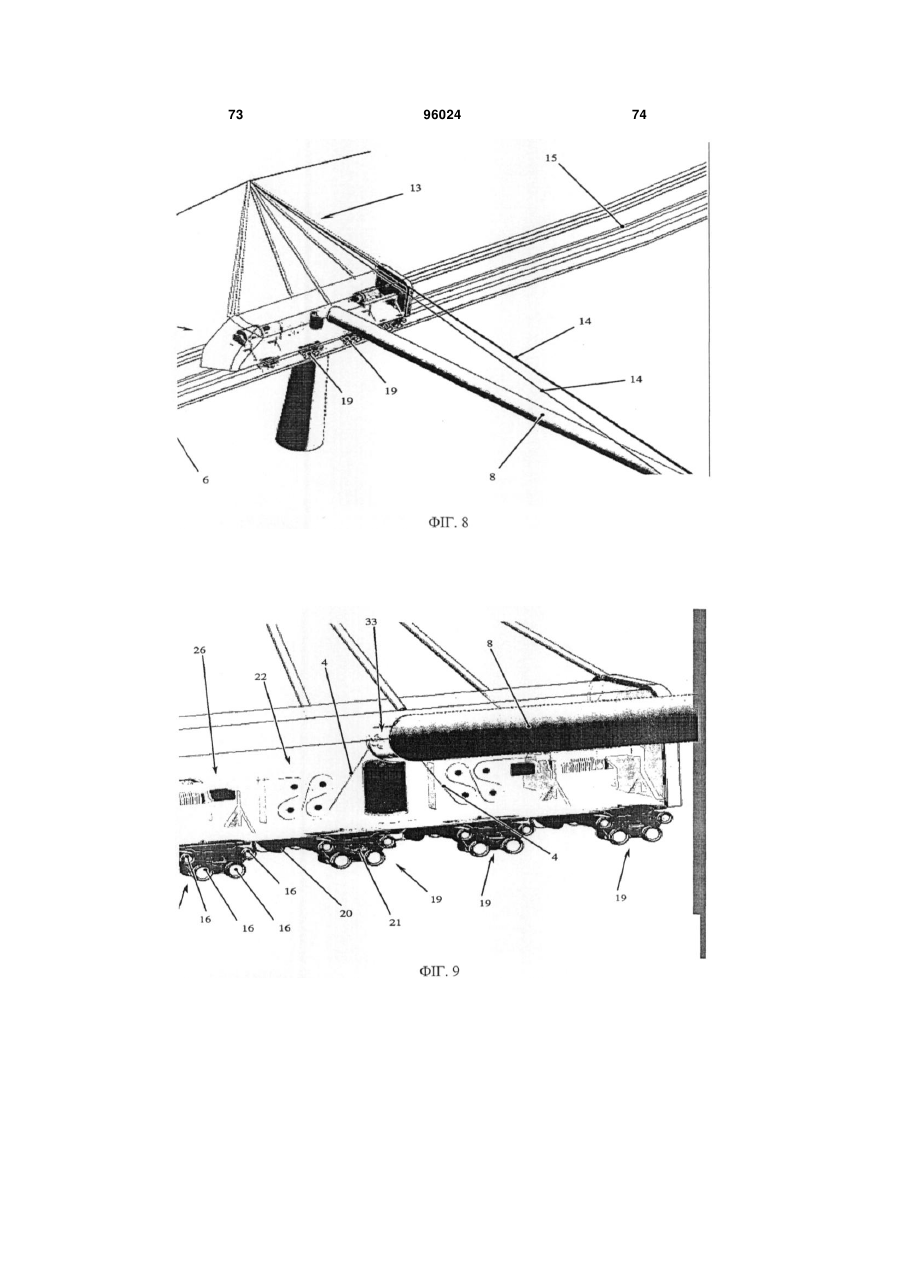
57. Система перетворення енергії вітру (1) за п. 1 або 51, яка відрізняється тим, що вона складається з розтягнутої гнучкої структури (12), і згадана розтягнута гнучка структура (12) сприяє утриманню ваги згаданої системи повернення у вихідне положення (8) та взаємно поєднує щонайменше два згадані модулі (5).
58. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) обладнана вертикальною структурою ґратчастого типу (13).
59. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) обладнана з'єднаними стрижнями (14), приєднаними кінцевою частиною до згаданої системи повернення у вихідне положення (8) і іншою кінцевою частиною до згаданої вертикальної структури ґратчастого типу (13).
60. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) обладнана з'єднаними стрижнями (14), які взаємно з'єднують згадані модулі (5).
61. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) обладнана з'єднаними стрижнями (14), які взаємно з'єднують згадані системи повернення у вихідне положення (8).
62. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) має трикутні перерізи, розроблені, виходячи з симетрії циліндра.
63. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) містить кільце, яке повторює скоординовані режими роботи згаданих модулів (5).
64. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана рейка (6) прокладена по замкнутій колії.
65. Система перетворення енергії вітру (1) за п. 64, яка відрізняється тим, що згадана замкнута колія має форму кола.
66. Система перетворення енергії вітру (1) за п. 64, яка відрізняється тим, що згадана замкнута колія має форму еліпса.
67. Система перетворення енергії вітру (1) за п. 66, яка відрізняється тим, що згадана еліптична колія має вісь, перпендикулярну напрямку дії згаданого потоку вітру (W).
68. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6, 7) встановлені горизонтально.
69. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6, 7) нахилені для протидії радіальній відцентровій силі, яка виникає внаслідок згаданого поступального руху згаданого модуля (5) та сили натягування з боку згаданого повітряного змія (2).
70. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6, 7) є паралельними.
71. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6, 7) є концентричними.
72. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6, 7) підняті над землею за допомогою опор.
73. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згаданий переріз рейки (6) приймає вигляд двох направлених одне проти одного зображень "Cs" біля її угнутої частини.
74. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що переріз згаданих рейок (6, 7) є прямокутним.
75. Система перетворення енергії вітру (1) за п. 1 або 42, яка відрізняється тим, що згадана рейка (6) обладнана колесами, по яких поступально рухається згаданий роликовий струмознімач (11) згаданого модуля (5).
76. Система перетворення енергії вітру (1) за п. 75, яка відрізняється тим, що згадані колеса містять генератори змінного струму, встановлені у згадані колеса для генерування електроенергії.
77. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадана рейка (6) обладнана щонайменше однією зубчатою рейкою (15).
78. Система перетворення енергії вітру (1) за п. 77, яка відрізняється тим, що згадана зубчата рейка (15) встановлена на згаданій рейці (6) зубчатою поверхнею перпендикулярно площині згаданої рейки (6), яка орієнтована на центр згаданої замкнутої колії, по якій йде згадана рейка (6).
79. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадана рейка (6) обладнана електромагнітами для уможливлення магнітної левітації та/або перетворення енергії за допомогою лінійних двигунів, які знаходяться у реверсивному режимі.
80. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що згаданий роликовий струмознімач (11) поступально рухається по згаданій рейці (6) за допомогою коліс (16, 17).
81. Система перетворення енергії вітру (1) за п. 80, яка відрізняється тим, що згадані колеса (16, 17) є гладкими.
82. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що згаданий роликовий струмознімач (11) поступально рухається по згаданій рейці (6) за допомогою постійних магнітів та/або електромагнітів, використовуючи принцип магнітної левітації.
83. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що згаданий роликовий струмознімач (11) обладнаний згаданими колесами (16, 17) для утримання його ваги.
84. Система перетворення енергії вітру (1) за п. 80 або 83, яка відрізняється тим, що згадані колеса (16, 17) взаємозв'язані зі згаданим модулем (5) за допомогою пружин, приєднаних паралельно демпферам.
85. Система перетворення енергії вітру (1) за п. 80 або 83, яка відрізняється тим, що згадані колеса (16) з'єднані у роликових струмознімачах (19).
86. Система перетворення енергії вітру (1) за п. 85, яка відрізняється тим, що згадані роликові струмознімачі (19) приєднані до згаданого роликового струмознімача (11).
87. Система перетворення енергії вітру (1) за п. 85, яка відрізняється тим, що згадані колеса (16) згаданого роликового струмознімача (19) встановлені у взаємно перпендикулярному положенні.
88. Система перетворення енергії вітру (1) за п. 85, яка відрізняється тим, що щонайменше одне зі згаданих коліс (16) згаданого роликового струмознімача (19) котиться по площині, яка є паралельною площині згаданої рейки (6), для утримання ваги згаданого модуля (5).
89. Система перетворення енергії вітру (1) за п. 85, яка відрізняється тим, що щонайменше одне зі згаданих коліс (16) згаданого роликового струмознімача (19) котиться по площині, яка є паралельною площині згаданої рейки (6), для запобігання перекиданню згаданого модуля (5).
90. Система перетворення енергії вітру (1) за п. 85, яка відрізняється тим, що щонайменше одне зі згаданих коліс (16) згаданого роликового струмознімача (19) котиться по площині, яка є паралельною площині згаданої рейки (6), для протидії радіальній відцентровій силі, яка впливає на згаданий модуль (5).
91. Система перетворення енергії вітру (1) за п. 73 або 85, яка відрізняється тим, що згаданий роликовий струмознімач (19) поступально рухається по згаданій рейці (6) усередині угнутості одного із двох зрізів "Cs".
92. Система перетворення енергії вітру (1) за п. 74 або 85, яка відрізняється тим, що згаданий роликовий струмознімач (19) поступально рухається по одній зі згаданих рейок (6) згаданими колесами (16), які котяться по трьох сторонах згаданої прямокутної секції для охоплення сторони згаданої рейки (6), орієнтованої всередину або зовні згаданої замкнутої колії.
93. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) складається щонайменше з однієї циліндричної трубки.
94. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) виготовлена у вигляді структури на підпірках.
95. Система перетворення енергії вітру (1) за п. 94, яка відрізняється тим, що згадана структура на підпірках обладнана щонайменше однією сіткою з набивного матеріалу для розміщення згаданого повітряного змія (2).
96. Система перетворення енергії вітру (1) за п. 94, яка відрізняється тим, що переріз згаданої структури на підпірках є трикутним.
97. Система перетворення енергії вітру (1) за п. 95, яка відрізняється тим, що згадана сітка з набивного матеріалу обладнана загородженням, пристосованим для уникнення защемлення при ковзанні по ній згаданого повітряного змія (2).
98. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що щонайменше одна ніша згаданої системи повернення у вихідне положення (8) доступна для виконання операцій технічного обслуговування.
99. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) відповідно до сили тяжіння реагує своєю власною вагою на складову вертикальної тяги згаданого повітряного змія (2).
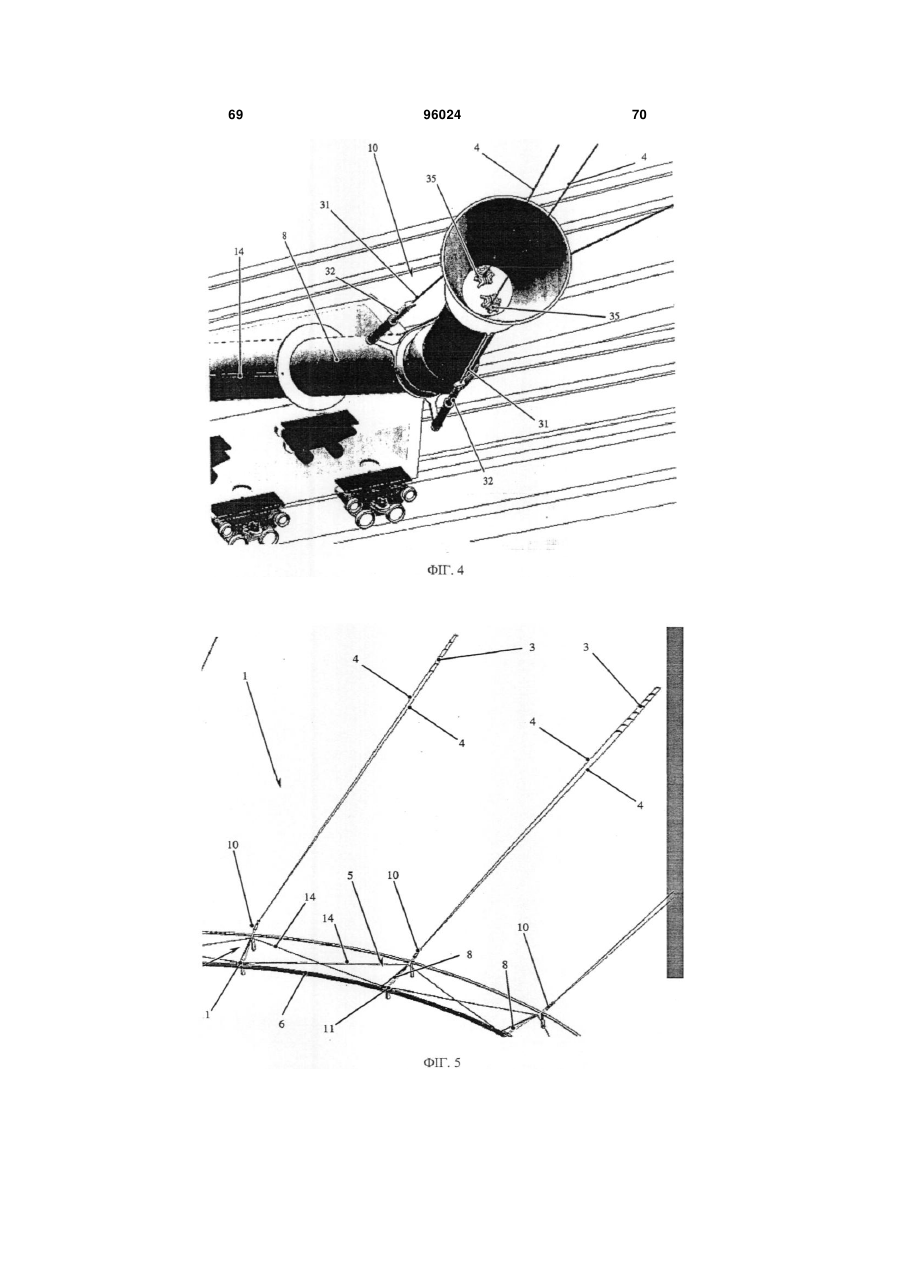
100. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) обладнана щонайменше одним шарнірним з'єднанням (9) для уможливлення її часткової або повної орієнтації.
101. Система перетворення енергії вітру (1) за п. 100, яка відрізняється тим, що рух здатної для орієнтації кінцевої частини (10) згаданої системи повернення у вихідне положення (8) керується системою, яка складається щонайменше з трьох тросів (31).
102. Система перетворення енергії вітру (1) за п. 101, яка відрізняється тим, що кожний зі згаданих тросів (31) приєднаний щонайменше до одного гідравлічного циліндра (32).
103. Система перетворення енергії вітру (1) за п. 102, яка відрізняється тим, що згаданий гідравлічний циліндр (32) приєднаний шарніром до згаданої системи повернення у вихідне положення (8), яка розташована поруч зі згаданим шарнірним з'єднанням (9).
104. Система перетворення енергії вітру (1) за п. 25 або 102, яка відрізняється тим, що згаданий гідравлічний циліндр (32) приводиться у дію гідравлічною системою, керованою згаданою інтелектуальною системою управління.
105. Система перетворення енергії вітру (1) за п. 101, яка відрізняється тим, що рух здатної до орієнтації згаданої кінцевої частини (10) керується лінійними електромеханічними модулями.
106. Система перетворення енергії вітру (1) за п. 105, яка відрізняється тим, що згадані лінійні електромеханічні модулі керуються згаданою інтелектуальною системою управління.
107. Система перетворення енергії вітру (1) за п. 101, яка відрізняється тим, що рух здатної до орієнтації згаданої кінцевої частини (10) керується за допомогою згаданої розтягнутої гнучкої структури (12).
108. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) обладнана закругленим вихідним краєм.
109. Система перетворення енергії вітру (1) за п. 101, яка відрізняється тим, що згадана кінцева частина (10) має секцію, яка розширяється за розмірами у напрямку вихідного краю. 110. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) розташована на землі.
111. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) містить щонайменше один контейнер з відкидною кришкою.
112. Система перетворення енергії вітру (1) за п. 111, яка відрізняється тим, що згаданий контейнер має форму, придатну для розміщення щонайменше однієї зі згаданих ланок (3) згаданих повітряних зміїв (2).
113. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) розташована радіально.
114. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) розташована усередині згаданої замкнутої колії.
115. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) розташована зовні згаданої замкнутої колії.
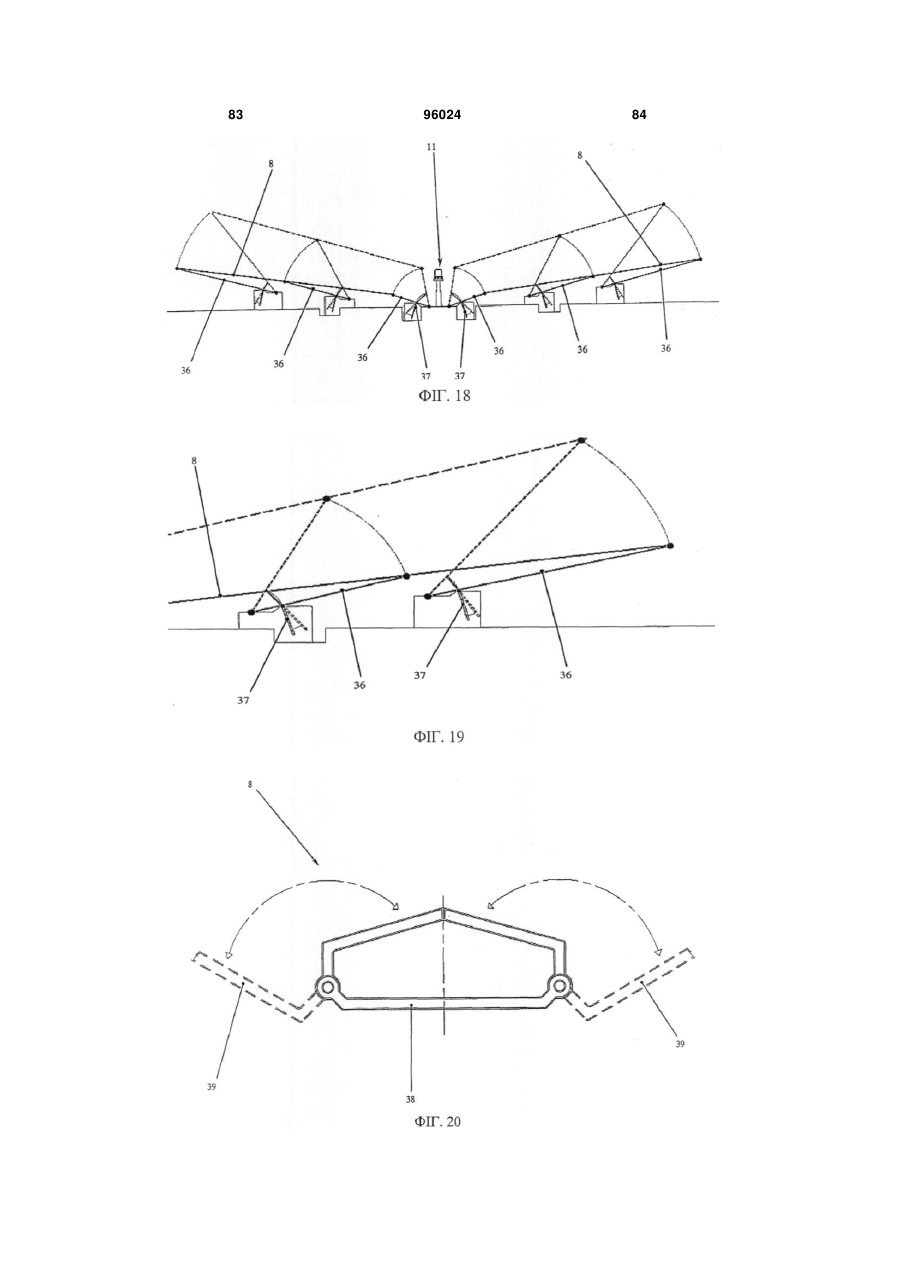
116. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) нахилена догори під час операцій повернення у вихідне положення та зльоту згаданого повітряного змія (2).
117. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) розташована горизонтально біля землі, коли відсутні операції повернення у вихідне положення та зльоту згаданого повітряного змія (2).
118. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення керується за допомогою щонайменше одного лінійного силового приводу(37).
119. Система перетворення енергії вітру (1) за п. 118, яка відрізняється тим, що згадані силові приводи (37) встановлюються на двох сторонах системи повернення у вихідне положення (8).
120. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) закріплюється до землі за допомогою стрижнів (36).
121. Система перетворення енергії вітру (1) за п. 120, яка відрізняється тим, що згадані стрижні (36) у місцях поруч з їх кінцевими частинами шарнірно з'єднані з підставками на землі та зі згаданою системою повернення у вихідне положення (8).
122. Система перетворення енергії вітру (1) за п. 120, яка відрізняється тим, що згадані лінійні силові приводи (37) шарнірно приєднані до підставок на землі і до згаданих стрижнів (36).
123. Система перетворення енергії вітру (1) за п. 120, яка відрізняється тим, що згадані стрижні (36) та згадані лінійні силові приводи (37) взаємно з'єднані таким чином, щоб після запуску згаданих силових приводів (37) кінцева частина згаданої системи повернення у вихідне положення (8), яка розташована якнайближче до згаданої рейки (6), підіймалася на ту саму висоту, на якій знаходиться згадана рейка (6), а кінцева частина згаданої системи повернення у вихідне положення (8), розташована якнайдалі від згаданої рейки (6), підіймалася на висоту, яка є більшою ніж та, на якій знаходиться згадана рейка (6).
124. Система перетворення енергії вітру (1) за п. 111, яка відрізняється тим, що згаданий контейнер з відкидною кришкою пристосований для відкривання у вигляді платформи.
125. Система перетворення енергії вітру (1) за п. 111, яка відрізняється тим, що кожен зі згаданих контейнерів з відкидною кришкою секціонується вздовж для того, щоб складатися щонайменше з двох частин (38, 39).
126. Система перетворення енергії вітру (1) за п. 125, яка відрізняється тим, що щонайменше згадана частина (38) є скринькою згаданого контейнера.
127. Система перетворення енергії вітру (1) за п. 126, яка відрізняється тим, що згадана скринька (38) встановлюється так, щоб її угнутість була скерована догори.
128. Система перетворення енергії вітру (1) за п. 125, яка відрізняється тим, що щонайменше згадана частина (39) складає кришку згаданого контейнера.
129. Система перетворення енергії вітру (1) за п. 124, яка відрізняється тим, що згаданий контейнер з відкидною кришкою пристосований для відкривання у вигляді платформи за допомогою щонайменше одного лінійного силового приводу.
130. Система перетворення енергії вітру (1) за п. 124, яка відрізняється тим, що згадані лінійні силові приводи керуються згаданою інтелектуальною системою управління.
131. Система перетворення енергії вітру (1) за п. 124, яка відрізняється тим, що згадані лінійні силові приводи є гідравлічними циліндрами, які приводяться у дію гідравлічною системою.
132. Система перетворення енергії вітру (1) за п. 131, яка відрізняється тим, що згадані лінійні силові приводи є лінійними електромеханічними модулями.
133. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані троси (4) обладнані системою автоматичного з'єднання та роз'єднання, за допомогою якої згадані троси (4) можуть оборотно приєднуватися та від'єднуватися до та від згаданого повітряного змія (2) відповідно.
134. Система перетворення енергії вітру (1) за п. 111, яка відрізняється тим, що згадана система повернення у вихідне положення (8) складається щонайменше з однієї автоматичної системи зберігання, пристосованої для послідовного повернення у вихідне положення та зльоту ланок (3) згаданих повітряних зміїв (2) та впорядкованого розміщення згаданих ланок (3) згаданих обладнаних крилами повітряних зміїв (2) усередині кожного контейнера з відкидною кришкою.
135. Система перетворення енергії вітру (1) за п. 134, яка відрізняється тим, що згадана автоматична система зберігання керується згаданою інтелектуальною системою управління.
136. Система перетворення енергії вітру (1) за п. 134, яка відрізняється тим, що згадана автоматична система зберігання обладнана полицями, що поступально рухаються за допомогою ременів.
137. Система перетворення енергії вітру (1) за п. 136, яка відрізняється тим, що згадані полиці поступально рухаються, утримуючи себе паралельно, та проходять шлях у вигляді замкнутої траєкторії.
138. Система перетворення енергії вітру (1) за п. 124, яка відрізняється тим, що згадана система повернення у вихідне положення (8) складається щонайменше з однієї напрямної системи, яка ховається, для полегшення посадки згаданих повітряних зміїв (2) у згаданий контейнер з відкидною кришкою, який відкривається у вигляді платформи.
139. Система перетворення енергії вітру (1) за п. 138, яка відрізняється тим, що згадана напрямна система, яка ховається, розташована поруч зі згаданим контейнером з відкидною кришкою.
140. Система перетворення енергії вітру (1) за п. 138, яка відрізняється тим, що згадана напрямна система, яка ховається, складається щонайменше з однієї пари стрижнів, розташованих по сторонах згаданого контейнера з відкидною кришкою.
141. Система перетворення енергії вітру (1) за п. 138, яка відрізняється тим, що згадана напрямна система, яка ховається, керується згаданою інтелектуальною системою управління.
142. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона складається з системи повернення та відштовхування для згаданого повітряного змія (2).
143. Система перетворення енергії вітру (1) за п. 142, яка відрізняється тим, що згадана система повернення та відштовхування розташовується усередині згаданої системи повернення у вихідне положення (8).
144. Система перетворення енергії вітру (1) за п. 143, яка відрізняється тим, що згадана система повернення та відштовхування складається щонайменше з одного роликового струмознімача, який ковзає вздовж щонайменше двох рейок усередині згаданої системи повернення у вихідне положення (8).
145. Система перетворення енергії вітру (1) за п. 143, яка відрізняється тим, що згадана система повернення та відштовхування обладнана щонайменше одним пристроєм для створення штучних поштовхів вітру.
146. Система перетворення енергії вітру (1) за п. 145, яка відрізняється тим, що ряд згаданих пристроїв для створення штучних поштовхів вітру встановлюється вздовж системи повернення у вихідне положення (8).
147. Система перетворення енергії вітру (1) за п. 145, яка відрізняється тим, що згадані пристрої для створення штучних поштовхів вітру керуються згаданою інтелектуальною системою управління.
148. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона складається з системи для поглинання піків сили натягування згаданих тросів (4).
149. Система перетворення енергії вітру (1) за п. 148, яка відрізняється тим, що згадана система поглинання піків сили натягування обладнана щонайменше однією амортизаційною противагою, яка підіймається з землі та поступально рухається по вертикалі.
150. Система перетворення енергії вітру (1) за п. 149, яка відрізняється тим, що згадана противага підіймається від землі завдяки силі натягування згаданого троса (4).
151. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що вона складається з системи гальмування згаданих тросів (4) для кожного зі згаданих модулів (5). 152. Система перетворення енергії вітру (1) за п. 151, яка відрізняється тим, що згадана система гальмування обладнана щонайменше одним шківом, з'єднаним з лінійним напрямним пристроєм, та щонайменше однією пружиною, прикріпленою одним кінцем до зазначеного шківа та іншім кінцем до згаданого роликового струмознімача (11).
153. Система перетворення енергії вітру (1) за п. 152, яка відрізняється тим, що згадана пружина стискається завдяки згаданому натягуванню згаданого троса (4).
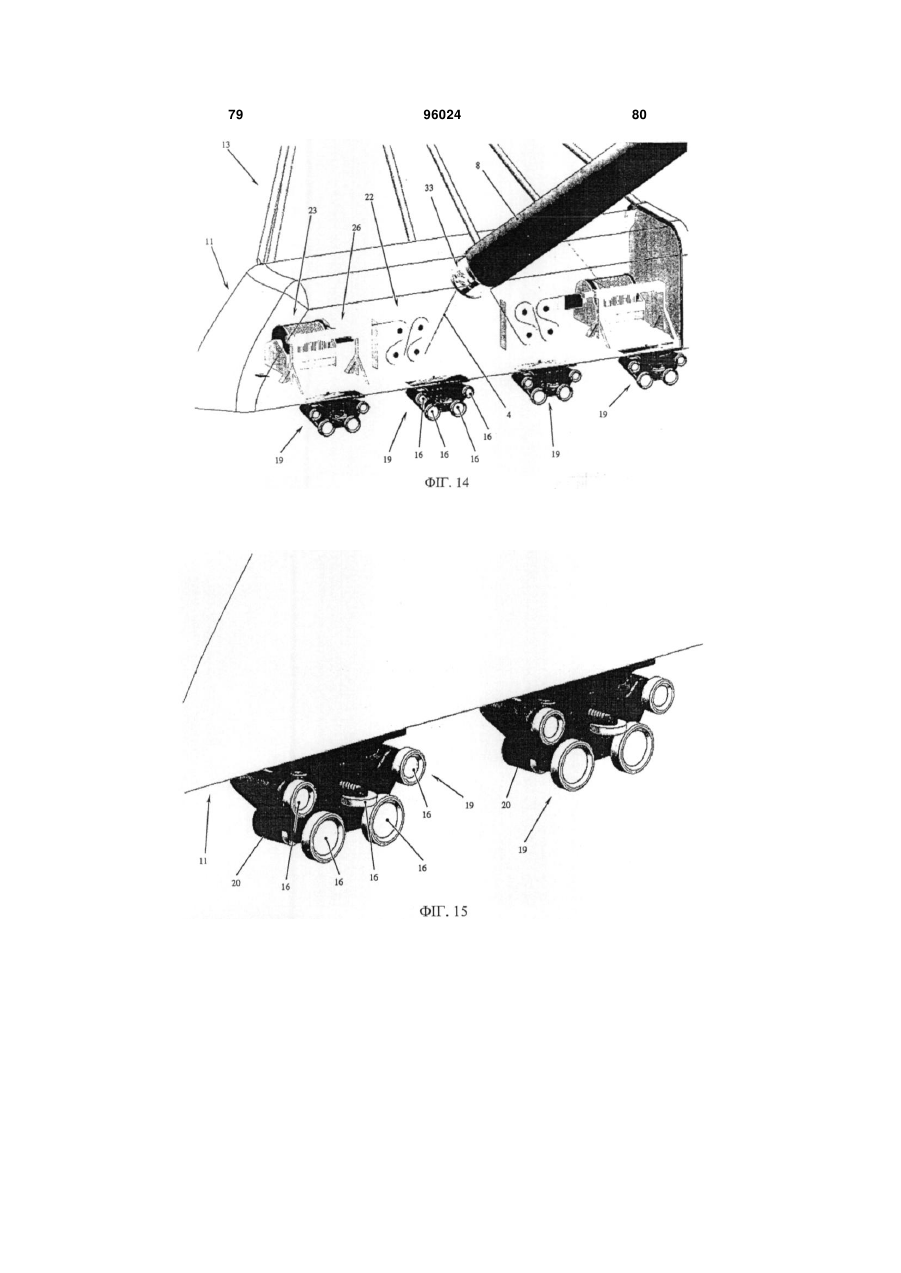
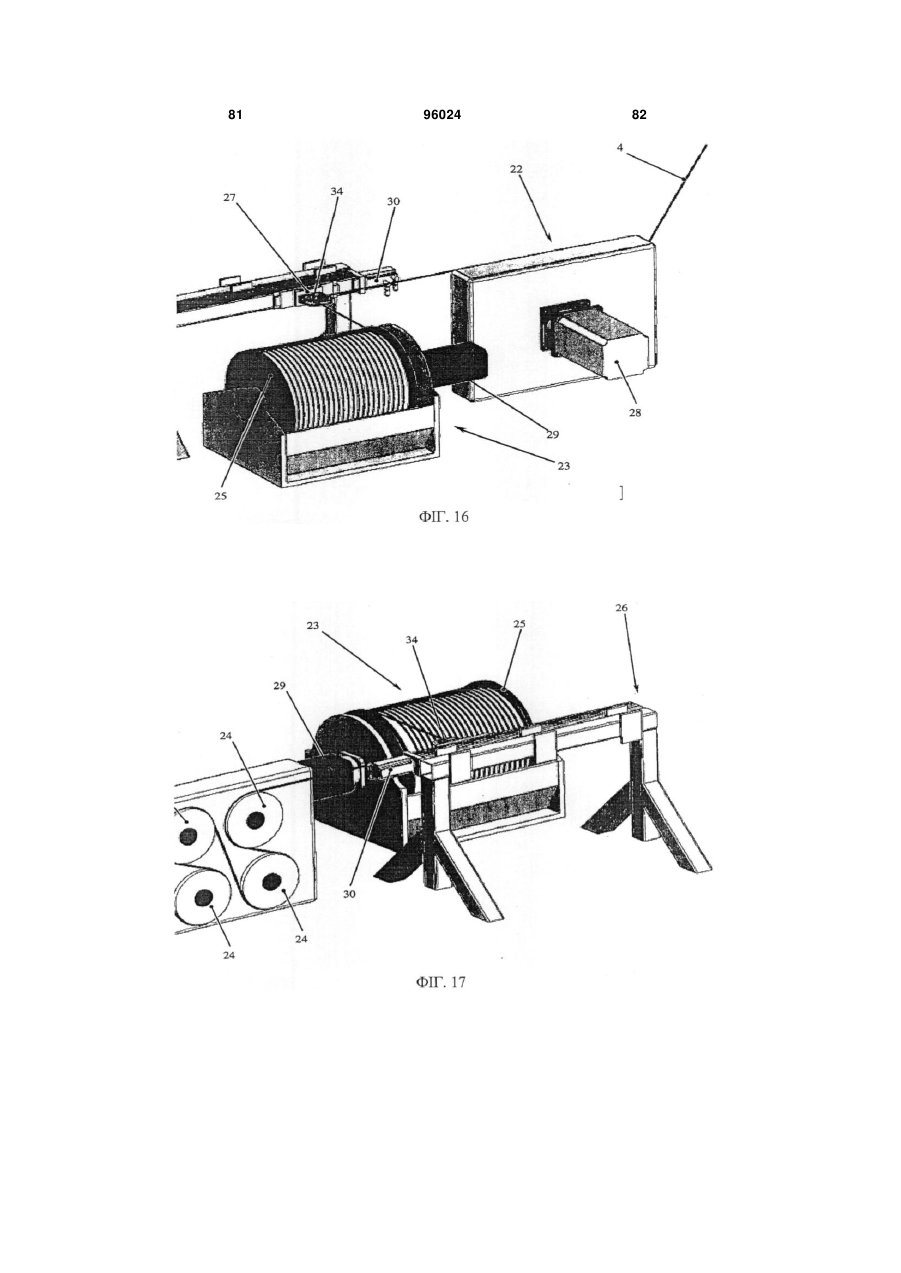
154. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона складається з системи намотування та розмотування (22) згаданого троса (4).
155. Система перетворення енергії вітру (1) за п. 154, яка відрізняється тим, що згадана система намотування та розмотування (22) складається щонайменше з чотирьох перших лебідок (24) для кожного зі згаданих тросів (4), що встановлені на двох рівнях та мають паралельні осі обертання, при цьому згадані перші лебідки (24) з'єднані щонайменше з одним першим електричним двигуном (28), керованим згаданою інтелектуальною системою управління.
156. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що згаданий перший електричний двигун (28) є також електричним генератором.
157. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що згадані перші лебідки (24) з'єднані зі згаданим першим електричним двигуном (28) за допомогою зубчатої передачі та встановлення щонайменше одного редуктора епіциклоїдного типу.
158. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що кожна зі згаданих перших лебідок (24) з'єднується з одним зі згаданих перших електричних двигунів (28) шляхом встановлення щонайменше одного редуктора епіциклоїдного типу.
159. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що навколо кожної зі згаданих перших лебідок (24) намотаний згаданий трос (4) на три чверті кола.
160. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що поверхня згаданих перших лебідок (24) має форму для укриття згаданого троса (4) та збільшує контактну поверхню.
161. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що згадані перші лебідки (24) мають різну шершавість поверхні.
162. Система перетворення енергії вітру (1) за п. 154, яка відрізняється тим, що згадана система намотування і розмотування (22) містить лебідку для кожного зі згаданих тросів (4), при цьому згаданий трос (4) намотується навколо згаданої лебідки, здійснюючи таку обмежену кількість обертань, щоб утворювався один шар звивин.
163. Система перетворення енергії вітру (1) за п. 154, яка відрізняється тим, що згадана система намотування і розмотування (22) для кожного зі згаданих тросів (4) містить щонайменше дві пари зрізаних доріжок, які проштовхуються поршнями, при цьому усередину кожної доріжки вставляється згаданий трос (4).
164. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона містить систему зберігання (23) згаданого троса (4).
165. Система перетворення енергії вітру (1) за п. 164, яка відрізняється тим, що згадана система зберігання (23) складається щонайменше з другої лебідки (25) для кожного з зазначених тросів (4), при цьому на кожну чи з кожної зі згаданих других лебідок (25) намотується або розмотується згаданий трос (4), при цьому згадана друга лебідка (25) з'єднана з другим електричним двигуном (29), керованим згаданою інтелектуальною системою управління.
166. Система перетворення енергії вітру (1) за п. 165, яка відрізняється тим, що згадана друга лебідка (25) з'єднана з другим електричним двигуном (29) встановленням щонайменше одного редуктора епіциклоїдного типу.
167. Система перетворення енергії вітру (1) за п. 165, яка відрізняється тим, що згадана друга лебідка (25) обладнана щонайменше одним ведучим модулем (26), пристосованим для відштовхування згаданого троса (4) з метою здійснення акуратного намотування на згадану другу лебідку (25).
168. Система перетворення енергії вітру (1) за п. 165, яка відрізняється тим, що згадана друга лебідка (25) встановлюється на роликовому струмознімачі, який ковзає вздовж рейки паралельно осі обертання згаданої лебідки (25).
169. Система перетворення енергії вітру (1) за п. 168, яка відрізняється тим, що ковзання згаданого роликового струмознімача вздовж згаданої рейки керується сумісною дією механізму ковзання та обертанням згаданої другої лебідки (25).
170. Система перетворення енергії вітру (1) за п. 169, яка відрізняється тим, що згаданий механізм ковзання приводиться у дію електричним двигуном, керованим згаданою інтелектуальною системою управління.
171. Система перетворення енергії вітру (1) за п. 170, яка відрізняється тим, що згаданий механізм ковзання приєднаний до згаданого третього електричного двигуна встановленням щонайменше одного редуктора епіциклоїдного типу.
172. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона містить щонайменше одну систему передачі, пристосовану для спрямування згаданих тросів (4) до згаданого повітряного змія (2).
173. Система перетворення енергії вітру (1) за п. 172, яка відрізняється тим, що згадана система передачі містить щонайменше один шків (35), встановлений на згаданому роликовому струмознімачі згаданої системи повернення та відштовхування згаданого повітряного змія (2), щонайменше один фіксований шків (33), безпосередньо прикріплений до згаданого модуля (5), щонайменше один шків для кожної зі згаданих систем для поглинання піків сили натягування згаданих тросів (4), щонайменше один шків для кожної зі згаданих систем для гальмування згаданих тросів (4) та щонайменше один шків (34), установлений на повзунах (27) згаданих приводних модулів (26) згаданих тросів (4).
174. Система перетворення енергії вітру (1) за п. 173, яка відрізняється тим, що згаданий повзун (27) пересувається вздовж рейки паралельно осі обертання згаданої лебідки (25) згаданої системи зберігання (23).
175. Система перетворення енергії вітру (1) за п. 174, яка відрізняється тим, що пересування згаданого повзуна (27) вздовж згаданої рейки управляється сумісною дією механізму ковзання та обертанням згаданої лебідки (25).
176. Система перетворення енергії вітру (1) за п. 175, яка відрізняється тим, що згаданий механізм ковзання приводиться у дію четвертим електричним двигуном, керованим згаданою інтелектуальною системою управління.
177. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана система генерування електроенергії також працює як двигун, при цьому згадана система генерування приводиться у дію поступальним рухом згаданого модуля (5) по згаданій рейці (6), коли працює як генератор, і керується згаданою інтелектуальною системою управління, коли працює як двигун.
178. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) згадана система генерування складається щонайменше з одного генератора/двигуна (20), напряму приведеного у дію обертанням щонайменше одного зі згаданих коліс (16) згаданого роликового струмознімача (11) згаданого модуля (5).
179. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона містить щонайменше одне зубчате колесо (18), яке зчіплюється та котиться по згаданій зубчатій рейці (15) згаданої рейки (6).
180. Система перетворення енергії вітру (1) за п. 179, яка відрізняється тим, що для кожного зі згаданих модулів (5) згадана система генерування складається щонайменше з одного генератора/двигуна (21), напряму приведеного у дію обертанням щонайменше одного зі згаданих зубчатих коліс (18) згаданої зубчатої рейки (15).
181. Система перетворення енергії вітру (1) за п. 177, яка відрізняється тим, що для кожного зі згаданих модулів (5) згадана система генерування містить щонайменше один реверсивний магнітний лінійний двигун, пристосований для роботи також і як генератор.
182. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що кожен зі згаданих модулів (5) обладнаний постійними магнітами, при цьому згадані постійні магніти індукують струми у згаданих електромагнітах, за допомогою яких згадана рейка (6) обладнана таким чином, щоб згадані струми частково генерували магнітне поле, яке протидіє індукованому, примушуючи згаданий модуль (5) підійматися у повітря.
183. Система перетворення енергії вітру (1) за п. 182, яка відрізняється тим, що згадані постійні магніти підживлюються надпровідними соленоїдами.
184. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що модульна композиція згаданих постійних магнітів та відповідних електромагнітів, направлених на згадану рейку (6) і на згаданий модуль (5), викликає безперервну зміну індукованих потоків упродовж відносного поступального руху згаданого модуля (5) відносно згаданої рейки (6).
185. Система перетворення енергії вітру (1) за п. 184, яка відрізняється тим, що згадані зміни потоків у згаданих електромагнітах поєднуються з потоками обмоток збору електроенергії.
186. Система перетворення енергії вітру (1) за п. 184, яка відрізняється тим, що згадані обмотки збору електроенергії управляються силовою електронікою.
187. Система перетворення енергії вітру (1) за п. 183, яка відрізняється тим, що згадані постійні магніти виготовляються з неодиму, заліза та бору.
188. Система перетворення енергії вітру (1) за п. 183, яка відрізняється тим, що з'єднання згаданих постійних магнітів зі згаданим роликовим струмознімачем (11) має два ступені свободи, як вісь шарніра кулеподібної форми.
189. Система перетворення енергії вітру (1) за п. 183, яка відрізняється тим, що з'єднання згаданих постійних магнітів зі згаданим роликовим струмознімачем (11) знаходиться у площині центру інерції згаданих постійних магнітів.
190. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадана інтелектуальна система управління керує згаданими першою та другою лебідками (24, 25) згаданої системи намотування та розмотування (22) згаданих тросів (4) та згаданої системи зберігання (23) згаданих тросів (2) для спрямування згаданого повітряного змія (2) вздовж згаданої траєкторії польоту.
191. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана інтелектуальна система управління містить підсистему самостійного калібрування згаданого набору датчиків згаданого повітряного змія (2).
192. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана інтелектуальна система управління містить підсистему попередження зіткнень між згаданим повітряним змієм (2) та літаючими об'єктами.
193. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана інтелектуальна система управління містить підсистему компенсації змін навантаження на згадані троси (4).
194. Система перетворення енергії вітру (1) за п. 26, яка відрізняється тим, що згадана система живлення містить щонайменше одне джерело живлення.
195. Система перетворення енергії вітру (1) за п. 26, яка відрізняється тим, що згадана система живлення містить щонайменше один трансформатор.
196. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана система живлення містить принаймні один акумулятор.
197. Спосіб виробництва електроенергії за допомогою системи перетворення енергії вітру (1) за п. 1, який відрізняється тим, що для кожного зі згаданих повітряних зміїв (2) включає етапи:
а) керування згаданою траєкторією польоту згаданого повітряного змія (2) таким чином, щоб він рухався у поперечному напрямку відносно напрямку згаданого потоку вітру (W), при цьому згадані троси (4), натягнені згаданим повітряним змієм (2) і з'єднані зі згаданим модулем (5) згаданої системи перетворення енергії вітру (1), приводять до поступального руху згаданого модуля (5) по згаданих рейках (6) завдяки дії тяги та відльоту згаданого повітряного змія (2) від згаданого модуля (5) в результаті розмотування згаданих тросів (4) за допомогою згаданих перших лебідок (24), керованих згаданими першими електричними двигунами (28);
б) керування згаданою траєкторією польоту згаданого повітряного змія (2) таким чином, щоб згаданий повітряний змій (2) рухався вздовж того самого напрямку згаданого потоку вітру (W), при цьому згадані троси (4), натягнені згаданим повітряним змієм (2) і з'єднані зі згаданим модулем (5) згаданої системи перетворення енергії вітру (1), приводять до поступального руху згаданого модуля (5) по згаданих рейках (6) завдяки дії сили тяги та наближення згаданого повітряного змія (2) до згаданого модуля (5) в результаті перемотування згаданих тросів (4) за допомогою згаданих перших лебідок (24), керованих згаданими першими електричними двигунами (28);
в) керування згаданою траєкторією польоту згаданого повітряного змія (2) таким чином, щоб згаданий повітряний змій (2) рухався у поперечному напрямку відносно напрямку згаданого потоку вітру (W), при цьому згадані троси (4), з'єднані зі згаданим модулем (5) згаданої системи перетворення енергії вітру (1), приводять до пересування згаданого модуля (5) по згаданих рейках (6) завдяки дії сили тяги та відльоту згаданого повітряного змія (2) від згаданого модулю (5) в результаті розмотування згаданих тросів (4) за допомогою згаданих перших лебідок (24), керованих згаданими першими електричними двигунами (28);
г) керування згаданою траєкторією польоту згаданого повітряного змія (2) таким чином, щоб згаданий повітряний змій (2) рухався у протилежному напрямку відносно напрямку згаданого потоку вітру (W) без утворення будь-якого гальмування згаданого поступального руху згаданого модуля (5) згаданої системи перетворення енергії вітру (1) в результаті перемотування згаданих тросів (4) за допомогою згаданих перших лебідок (24), керованих згаданими першими електричними двигунами (28); та
д) повторення попередніх етапів.
198. Спосіб за п. 197, який відрізняється тим, що згадані етапи а) та/або б), та/або в), та/або г), та/або д) виконуються автоматично інтелектуальною системою управління.
199. Спосіб виробництва електроенергії за допомогою системи перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані перші двигуни (28) виконують також функції генераторів, виробляючи електроенергію за допомогою обертання згаданих перших лебідок (24).
Текст
1. Система перетворення енергії вітру (1), яка відрізняється тим, що вона складається щонайменше з одного повітряного змія (2), пристосованого під керування з землі та зануреного щонайменше в один потік вітру (W), та щонайменше з одного модуля (5), пристосованого до поступального руху щонайменше по одній рейці (6, 7), розташованій біля землі, при цьому згаданий модуль (5) з'єднується за допомогою щонайменше одного троса (4) зі згаданим повітряним змієм (2), пристосованим під керування згаданим модулем (5) для протягування згаданого модуля (5) по згаданій рейці (6, 7) та для виконання згаданого перетворення енергії вітру в електричну за допомогою щонайменше однієї системи генерування, що взаємодіє зі згаданим модулем (5) та згаданою рейкою (6, 7), при цьому згаданий трос (4) пристосований як до передачі механічної енергії від згаданого повітряного змія (2) та до нього, так і для управління траєкторією польоту згаданого повітряного змія (2). 2. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані повітряні змії (2) пристосовані під керування таким чином, щоб тяга, викликана згаданим потоком вітру (W), була максимальною і не заважала згаданому поступальному руху згаданого модуля (5) по згаданій рейці (6). 3. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згаданий повітряний змій (2) пристосований під керування для вироб 2 (19) 1 3 13. Система перетворення енергії вітру (1) за п. 11, яка відрізняється тим, що згадані стінки згаданих повітряних зміїв (2) згаданої ланки (3) є з'єднувальним елементом між згаданими повітряними зміями (2). 14. Система перетворення енергії вітру (1) за п. 13, яка відрізняється тим, що згадані стінки мають ділянку аеродинамічної поверхні. 15. Система перетворення енергії вітру (1) за п. 11, яка відрізняється тим, що згадані повітряні змії (2) у згаданій ланці (3) мають форму дуги, по якій згадані стінки простираються для приєднання до інших згаданих повітряних зміїв (2). 16. Система перетворення енергії вітру (1) за п. 11, яка відрізняється тим, що згадані повітряні змії (2) у згаданій ланці (3) мають форму плоского крила з однією або двома згаданими з'єднувальними стінками. 17. Система перетворення енергії вітру (1) за п. 11, яка відрізняється тим, що згадані повітряні змії (2) у згаданій ланці (3) мають розміри, відмінні один від одного. 18. Система перетворення енергії вітру (1) за п. 17, яка відрізняється тим, що згадані повітряні змії (2), розташовані якнайближче до згаданого модуля (5), мають більшу площу, а розміри згаданих повітряних зміїв (2) зменшуються пропорційно віддаленню від згаданого модуля (5). 19. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що переріз згаданого троса (4) є змінним. 20 . Система перетворення енергії вітру (1) за п. 19, яка відрізняється тим, що згаданий трос (4) має менший переріз поруч зі згаданим повітряним змієм (2) і більший переріз поруч зі згаданим модулем (5). 21. Система перетворення енергії вітру (1) за п. 19, яка відрізняється тим, що змінювання згаданого перерізу згаданого троса (4) є безперервним. 22. Система перетворення енергії вітру (1) за п. 19, яка відрізняється тим, що зміна згаданого перерізу згаданого троса (4) здійснюється крок за кроком зі зміщеннями. 23. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що сегмент довжини згаданого троса, розташованого якнайближче до згаданого повітряного змія (2), моделюється з урахуванням аеродинаміки для забезпечення асиметричного підйому угору. 24. Система перетворення енергії вітру (1) за п. 23, яка відрізняється тим, що згаданий трос (4) покритий обшивкою з матеріалу, отриманого за допомогою екструзії, із зіркоподібним перерізом. 25. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що включає інтелектуальну систему управління, що пристосована для автоматичного керування згаданим повітряним змієм (2) вздовж згаданої траєкторії польоту. 26. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що включає систему живлення, яка взаємодіє зі згаданою інтелектуальною системою управління для керування акумулюванням та постачанням згаданої електроенергії. 27. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана інтелекту 96024 4 альна система управління обладнана набором датчиків, розташованих на згаданому повітряному змії (2). 28. Система перетворення енергії вітру (1) за п. 27, яка відрізняється тим, що згадані датчики, розташовані на згаданому повітряному змії (2), мають автономне живлення. 29. Система перетворення енергії вітру (1) за п. 27, яка відрізняється тим, що згадані датчики, розташовані на згаданому повітряному змії (2), пересилають інформацію у бездротовому режимі до розташованих на землі компонентів інтелектуальної системи управління. 30. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана інтелектуальна система управління обладнана набором розташованих на землі датчиків. 31. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані повітряні змії (2) обладнані системою запуску та стабілізації для виконання маневру бокового ковзання. 32. Система перетворення енергії вітру (1) за п. 31, яка відрізняється тим, що згадана система запуску та стабілізації складається щонайменше з одного інтерцептора. 33. Система перетворення енергії вітру (1) за п. 32, яка відрізняється тим, що згаданий інтерцептор приводиться у дію за допомогою систем з автономним живленням. 34. Система перетворення енергії вітру (1) за п. 33, яка відрізняється тим, що згаданий інтерцептор приводиться у дію за допомогою систем, які живляться через щонайменше один кабель, який від згаданого модуля (5) досягає згаданого повітряного змія (2). 35. Система перетворення енергії вітру (1) за п. 34, яка відрізняється тим, що згадані системи, які приводять у дію згаданий інтерцептор, є п'єзоелектричними. 36. Система перетворення енергії вітру (1) за п. 34, яка відрізняється тим, що згадані системи, які приводять у дію згаданий інтерцептор, містять полімери з ефектом запам'ятовування форми. 37. Система перетворення енергії вітру (1) за п. 34, яка відрізняється тим, що згадані системи, які приводять у дію згаданий інтерцептор, містять волокна, виготовлені зі сплавів з пам'яттю форми. 38. Система перетворення енергії вітру (1) за п. 34, яка відрізняється тим, що згадані системи, які приводять у дію згаданий інтерцептор, отримують від згаданої інтелектуальної системи управління команди у бездротовому режимі. 39. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадана система запуску та стабілізації для виконання згаданого маневру бокового ковзання має щонайменше одну спрямовану повітряну камеру плавучості. 40. Система перетворення енергії вітру (1) за п. 39, яка відрізняється тим, що згадані спрямовані повітряні камери плавучості скеровані у поперечному напрямку до напрямку поштовхів згаданого потоку вітру (W) на згаданий повітряний змій (2) та є такими, що гнучко прибираються для усунення зміни коефіцієнта корисної дії згаданого повітряного змія (2). 5 41. Система перетворення енергії вітру (1) за п. 39, яка відрізняється тим, що упродовж виконання згаданого маневру бокового ковзання згадані спрямовані повітряні камери плавучості підіймаються під дією потоку. 42. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згаданий модуль (5) обладнаний щонайменше одним роликовим струмознімачем (11) для поступального руху вздовж згаданої рейки (6; 7). 43. Система перетворення енергії вітру за п. 42, яка відрізняється тим, що згаданий роликовий струмознімач (11) має аеродинамічну форму. 44. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що на згаданому роликовому струмознімачі (11) встановлені компоненти для керування рухом згаданого повітряного змія (2) та для зберігання згаданих тросів (4). 45. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що на згаданому роликовому струмознімачі (11) встановлені компоненти для перетворення енергії. 46. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6) встановлені на різних висотах. 47. Система перетворення енергії вітру (1) за п. 46, яка відрізняється тим, що щонайменше одна зі згаданих рейок (6, 7) розташована на меншій висоті відносно щонайменше однієї якнайдалі зовнішньо розташованої зі згаданих рейок (6; 7) і на більшій висоті відносно щонайменше однієї якнайдалі усередину розташованої зі згаданих рейок (6; 7). 48. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що кожен зі згаданих модулів (5) обладнаний двома згаданими роликовими струмознімачами (11), які поступально рухаються по згаданих рейках (6), розташованих на різних висотах. 49. Система перетворення енергії вітру (1) за п. 44 або 48, яка відрізняється тим, що на згаданому роликовому струмознімачі (11), який поступально рухається по згаданій рейці (6), розташованій на меншій висоті, встановлені згадані компоненти для керування рухом згаданого повітряного змія (2) та для зберігання згаданих тросів (4). 50. Система перетворення енергії вітру (1) за п. 45 або 48, яка відрізняється тим, що на згаданому роликовому струмознімачі (11), який поступально рухається по згаданій рейці (6), розташованій на більшій висоті, встановлені згадані компоненти для перетворення енергії. 51. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що складається щонайменше з однієї системи повернення (8) згаданого повітряного змія (2) у вихідне положення. 52. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) нахилена стосовно землі. 53. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) з'єднана зі згаданим роликовим струмознімачем (11), розта 96024 6 шованим біля щонайменше її однієї кінцевої частини. 54. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) з'єднана зі згаданим роликовим струмознімачем (11), який поступально рухається на більшій висоті біля кінцевої частини згаданої системи повернення у вихідне положення (8), від якої згадані троси (4) простираються до згаданого повітряного змія (2). 55. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) з'єднана зі згаданим роликовим струмознімачем (11), який поступально рухається на меншій висоті біля кінцевої частини згаданої системи повернення у вихідне положення (8), від якої згадані троси (4) простираються до згаданого повітряного змія (2). 56. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) обладнана амортизованими колесами (17), які поступально рухаються щонайменше по одній рейці (7). 57. Система перетворення енергії вітру (1) за п. 1 або 51, яка відрізняється тим, що вона складається з розтягнутої гнучкої структури (12), і згадана розтягнута гнучка структура (12) сприяє утриманню ваги згаданої системи повернення у вихідне положення (8) та взаємно поєднує щонайменше два згадані модулі (5). 58. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) обладнана вертикальною структурою ґратчастого типу (13). 59. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) обладнана з'єднаними стрижнями (14), приєднаними кінцевою частиною до згаданої системи повернення у вихідне положення (8) і іншою кінцевою частиною до згаданої вертикальної структури ґратчастого типу (13). 60. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) обладнана з'єднаними стрижнями (14), які взаємно з'єднують згадані модулі (5). 61. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) обладнана з'єднаними стрижнями (14), які взаємно з'єднують згадані системи повернення у вихідне положення (8). 62. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) має трикутні перерізи, розроблені, виходячи з симетрії циліндра. 63. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана розтягнута гнучка структура (12) містить кільце, яке повторює скоординовані режими роботи згаданих модулів (5). 64. Система перетворення енергії вітру (1) за п. 57, яка відрізняється тим, що згадана рейка (6) прокладена по замкнутій колії. 7 65. Система перетворення енергії вітру (1) за п. 64, яка відрізняється тим, що згадана замкнута колія має форму кола. 66. Система перетворення енергії вітру (1) за п. 64, яка відрізняється тим, що згадана замкнута колія має форму еліпса. 67. Система перетворення енергії вітру (1) за п. 66, яка відрізняється тим, що згадана еліптична колія має вісь, перпендикулярну напрямку дії згаданого потоку вітру (W). 68. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6, 7) встановлені горизонтально. 69. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6, 7) нахилені для протидії радіальній відцентровій силі, яка виникає внаслідок згаданого поступального руху згаданого модуля (5) та сили натягування з боку згаданого повітряного змія (2). 70. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6, 7) є паралельними. 71. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6, 7) є концентричними. 72. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані рейки (6, 7) підняті над землею за допомогою опор. 73. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згаданий переріз рейки (6) приймає вигляд двох направлених одне проти одного зображень "Cs" біля її угнутої частини. 74. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що переріз згаданих рейок (6, 7) є прямокутним. 75. Система перетворення енергії вітру (1) за п. 1 або 42, яка відрізняється тим, що згадана рейка (6) обладнана колесами, по яких поступально рухається згаданий роликовий струмознімач (11) згаданого модуля (5). 76. Система перетворення енергії вітру (1) за п. 75, яка відрізняється тим, що згадані колеса містять генератори змінного струму, встановлені у згадані колеса для генерування електроенергії. 77. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадана рейка (6) обладнана щонайменше однією зубчатою рейкою (15). 78. Система перетворення енергії вітру (1) за п. 77, яка відрізняється тим, що згадана зубчата рейка (15) встановлена на згаданій рейці (6) зубчатою поверхнею перпендикулярно площині згаданої рейки (6), яка орієнтована на центр згаданої замкнутої колії, по якій йде згадана рейка (6). 79. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадана рейка (6) обладнана електромагнітами для уможливлення магнітної левітації та/або перетворення енергії за допомогою лінійних двигунів, які знаходяться у реверсивному режимі. 80. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що згаданий роликовий струмознімач (11) поступально рухається по згаданій рейці (6) за допомогою коліс (16, 17). 96024 8 81. Система перетворення енергії вітру (1) за п. 80, яка відрізняється тим, що згадані колеса (16, 17) є гладкими. 82. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що згаданий роликовий струмознімач (11) поступально рухається по згаданій рейці (6) за допомогою постійних магнітів та/або електромагнітів, використовуючи принцип магнітної левітації. 83. Система перетворення енергії вітру (1) за п. 42, яка відрізняється тим, що згаданий роликовий струмознімач (11) обладнаний згаданими колесами (16, 17) для утримання його ваги. 84. Система перетворення енергії вітру (1) за п. 80 або 83, яка відрізняється тим, що згадані колеса (16, 17) взаємозв'язані зі згаданим модулем (5) за допомогою пружин, приєднаних паралельно демпферам. 85. Система перетворення енергії вітру (1) за п. 80 або 83, яка відрізняється тим, що згадані колеса (16) з'єднані у роликових струмознімачах (19). 86. Система перетворення енергії вітру (1) за п. 85, яка відрізняється тим, що згадані роликові струмознімачі (19) приєднані до згаданого роликового струмознімача (11). 87. Система перетворення енергії вітру (1) за п. 85, яка відрізняється тим, що згадані колеса (16) згаданого роликового струмознімача (19) встановлені у взаємно перпендикулярному положенні. 88. Система перетворення енергії вітру (1) за п. 85, яка відрізняється тим, що щонайменше одне зі згаданих коліс (16) згаданого роликового струмознімача (19) котиться по площині, яка є паралельною площині згаданої рейки (6), для утримання ваги згаданого модуля (5). 89. Система перетворення енергії вітру (1) за п. 85, яка відрізняється тим, що щонайменше одне зі згаданих коліс (16) згаданого роликового струмознімача (19) котиться по площині, яка є паралельною площині згаданої рейки (6), для запобігання перекиданню згаданого модуля (5). 90. Система перетворення енергії вітру (1) за п. 85, яка відрізняється тим, що щонайменше одне зі згаданих коліс (16) згаданого роликового струмознімача (19) котиться по площині, яка є паралельною площині згаданої рейки (6), для протидії радіальній відцентровій силі, яка впливає на згаданий модуль (5). 91. Система перетворення енергії вітру (1) за п. 73 або 85, яка відрізняється тим, що згаданий роликовий струмознімач (19) поступально рухається по згаданій рейці (6) усередині угнутості одного із двох зрізів "Cs". 92. Система перетворення енергії вітру (1) за п. 74 або 85, яка відрізняється тим, що згаданий роликовий струмознімач (19) поступально рухається по одній зі згаданих рейок (6) згаданими колесами (16), які котяться по трьох сторонах згаданої прямокутної секції для охоплення сторони згаданої рейки (6), орієнтованої всередину або зовні згаданої замкнутої колії. 93. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) складається щонайменше з однієї циліндричної трубки. 9 94. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) виготовлена у вигляді структури на підпірках. 95. Система перетворення енергії вітру (1) за п. 94, яка відрізняється тим, що згадана структура на підпірках обладнана щонайменше однією сіткою з набивного матеріалу для розміщення згаданого повітряного змія (2). 96. Система перетворення енергії вітру (1) за п. 94, яка відрізняється тим, що переріз згаданої структури на підпірках є трикутним. 97. Система перетворення енергії вітру (1) за п. 95, яка відрізняється тим, що згадана сітка з набивного матеріалу обладнана загородженням, пристосованим для уникнення защемлення при ковзанні по ній згаданого повітряного змія (2). 98. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що щонайменше одна ніша згаданої системи повернення у вихідне положення (8) доступна для виконання операцій технічного обслуговування. 99. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) відповідно до сили тяжіння реагує своєю власною вагою на складову вертикальної тяги згаданого повітряного змія (2). 100. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) обладнана щонайменше одним шарнірним з'єднанням (9) для уможливлення її часткової або повної орієнтації. 101. Система перетворення енергії вітру (1) за п. 100, яка відрізняється тим, що рух здатної для орієнтації кінцевої частини (10) згаданої системи повернення у вихідне положення (8) керується системою, яка складається щонайменше з трьох тросів (31). 102. Система перетворення енергії вітру (1) за п. 101, яка відрізняється тим, що кожний зі згаданих тросів (31) приєднаний щонайменше до одного гідравлічного циліндра (32). 103. Система перетворення енергії вітру (1) за п. 102, яка відрізняється тим, що згаданий гідравлічний циліндр (32) приєднаний шарніром до згаданої системи повернення у вихідне положення (8), яка розташована поруч зі згаданим шарнірним з'єднанням (9). 104. Система перетворення енергії вітру (1) за п. 25 або 102, яка відрізняється тим, що згаданий гідравлічний циліндр (32) приводиться у дію гідравлічною системою, керованою згаданою інтелектуальною системою управління. 105. Система перетворення енергії вітру (1) за п. 101, яка відрізняється тим, що рух здатної до орієнтації згаданої кінцевої частини (10) керується лінійними електромеханічними модулями. 106. Система перетворення енергії вітру (1) за п. 105, яка відрізняється тим, що згадані лінійні електромеханічні модулі керуються згаданою інтелектуальною системою управління. 107. Система перетворення енергії вітру (1) за п. 101, яка відрізняється тим, що рух здатної до орієнтації згаданої кінцевої частини (10) керується 96024 10 за допомогою згаданої розтягнутої гнучкої структури (12). 108. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) обладнана закругленим вихідним краєм. 109. Система перетворення енергії вітру (1) за п. 101, яка відрізняється тим, що згадана кінцева частина (10) має секцію, яка розширяється за розмірами у напрямку вихідного краю. 110. Система перетворення енергії вітру (1) за п. 51, яка відрізняється тим, що згадана система повернення у вихідне положення (8) розташована на землі. 111. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) містить щонайменше один контейнер з відкидною кришкою. 112. Система перетворення енергії вітру (1) за п. 111, яка відрізняється тим, що згаданий контейнер має форму, придатну для розміщення щонайменше однієї зі згаданих ланок (3) згаданих повітряних зміїв (2). 113. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) розташована радіально. 114. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) розташована усередині згаданої замкнутої колії. 115. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) розташована зовні згаданої замкнутої колії. 116. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) нахилена догори під час операцій повернення у вихідне положення та зльоту згаданого повітряного змія (2). 117. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) розташована горизонтально біля землі, коли відсутні операції повернення у вихідне положення та зльоту згаданогоповітряного змія (2). 118. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення керується за допомогою щонайменше одного лінійного силового приводу(37). 119. Система перетворення енергії вітру (1) за п. 118, яка відрізняється тим, що згадані силові приводи (37) встановлюються на двох сторонах системи повернення у вихідне положення (8). 120. Система перетворення енергії вітру (1) за п. 110, яка відрізняється тим, що згадана система повернення у вихідне положення (8) закріплюється до землі за допомогою стрижнів (36). 121. Система перетворення енергії вітру (1) за п. 120, яка відрізняється тим, що згадані стрижні (36) у місцях поруч з їх кінцевими частинами шарнірно з'єднані з підставками на землі та зі згаданою системою повернення у вихідне положення (8). 11 122. Система перетворення енергії вітру (1) за п. 120, яка відрізняється тим, що згадані лінійні силові приводи (37) шарнірно приєднані до підставок на землі і до згаданих стрижнів (36). 123. Система перетворення енергії вітру (1) за п. 120, яка відрізняється тим, що згадані стрижні (36) та згадані лінійні силові приводи (37) взаємно з'єднані таким чином, щоб після запуску згаданих силових приводів (37) кінцева частина згаданої системи повернення у вихідне положення (8), яка розташована якнайближче до згаданої рейки (6), підіймалася на ту саму висоту, на якій знаходиться згадана рейка (6), а кінцева частина згаданої системи повернення у вихідне положення (8), розташована якнайдалі від згаданої рейки (6), підіймалася на висоту, яка є більшою ніж та, на якій знаходиться згадана рейка (6). 124. Система перетворення енергії вітру (1) за п. 111, яка відрізняється тим, що згаданий контейнер з відкидною кришкою пристосований для відкривання у вигляді платформи. 125. Система перетворення енергії вітру (1) за п. 111, яка відрізняється тим, що кожен зі згаданих контейнерів з відкидною кришкою секціонується вздовж для того, щоб складатися щонайменше з двох частин (38, 39). 126. Система перетворення енергії вітру (1) за п. 125, яка відрізняється тим, що щонайменше згадана частина (38) є скринькою згаданого контейнера. 127. Система перетворення енергії вітру (1) за п. 126, яка відрізняється тим, що згадана скринька (38) встановлюється так, щоб її угнутість була скерована догори. 128. Система перетворення енергії вітру (1) за п. 125, яка відрізняється тим, що щонайменше згадана частина (39) складає кришку згаданого контейнера. 129. Система перетворення енергії вітру (1) за п. 124, яка відрізняється тим, що згаданий контейнер з відкидною кришкою пристосований для відкривання у вигляді платформи за допомогою щонайменше одного лінійного силового приводу. 130. Система перетворення енергії вітру (1) за п. 124, яка відрізняється тим, що згадані лінійні силові приводи керуються згаданою інтелектуальною системою управління. 131. Система перетворення енергії вітру (1) за п. 124, яка відрізняється тим, що згадані лінійні силові приводи є гідравлічними циліндрами, які приводяться у дію гідравлічною системою. 132. Система перетворення енергії вітру (1) за п. 131, яка відрізняється тим, що згадані лінійні силові приводи є лінійними електромеханічними модулями. 133. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадані троси (4) обладнані системою автоматичного з'єднання та роз'єднання, за допомогою якої згадані троси (4) можуть оборотно приєднуватися та від'єднуватися до та від згаданого повітряного змія (2) відповідно. 134. Система перетворення енергії вітру (1) за п. 111, яка відрізняється тим, що згадана система повернення у вихідне положення (8) складається щонайменше з однієї автоматичної системи збері 96024 12 гання, пристосованої для послідовного повернення у вихідне положення та зльоту ланок (3) згаданих повітряних зміїв (2) та впорядкованого розміщення згаданих ланок (3) згаданих обладнаних крилами повітряних зміїв (2) усередині кожного контейнера з відкидною кришкою. 135. Система перетворення енергії вітру (1) за п. 134, яка відрізняється тим, що згадана автоматична система зберігання керується згаданою інтелектуальною системою управління. 136. Система перетворення енергії вітру (1) за п. 134, яка відрізняється тим, що згадана автоматична система зберігання обладнана полицями, що поступально рухаються за допомогою ременів. 137. Система перетворення енергії вітру (1) за п. 136, яка відрізняється тим, що згадані полиці поступально рухаються, утримуючи себе паралельно, та проходять шлях у вигляді замкнутої траєкторії. 138. Система перетворення енергії вітру (1) за п. 124, яка відрізняється тим, що згадана система повернення у вихідне положення (8) складається щонайменше з однієї напрямної системи, яка ховається, для полегшення посадки згаданих повітряних зміїв (2) у згаданий контейнер з відкидною кришкою, який відкривається у вигляді платформи. 139. Система перетворення енергії вітру (1) за п. 138, яка відрізняється тим, що згадана напрямна система, яка ховається, розташована поруч зі згаданим контейнером з відкидною кришкою. 140. Система перетворення енергії вітру (1) за п. 138, яка відрізняється тим, що згадана напрямна система, яка ховається, складається щонайменше з однієї пари стрижнів, розташованих по сторонах згаданого контейнера з відкидною кришкою. 141. Система перетворення енергії вітру (1) за п. 138, яка відрізняється тим, що згадана напрямна система, яка ховається, керується згаданою інтелектуальною системою управління. 142. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона складається з системи повернення та відштовхування для згаданого повітряного змія (2). 143. Система перетворення енергії вітру (1) за п. 142, яка відрізняється тим, що згадана система повернення та відштовхування розташовується усередині згаданої системи повернення у вихідне положення (8). 144. Система перетворення енергії вітру (1) за п. 143, яка відрізняється тим, що згадана система повернення та відштовхування складається щонайменше з одного роликового струмознімача, який ковзає вздовж щонайменше двох рейок усередині згаданої системи повернення у вихідне положення (8). 145. Система перетворення енергії вітру (1) за п. 143, яка відрізняється тим, що згадана система повернення та відштовхування обладнана щонайменше одним пристроєм для створення штучних поштовхів вітру. 146. Система перетворення енергії вітру (1) за п. 145, яка відрізняється тим, що ряд згаданих пристроїв для створення штучних поштовхів вітру 13 встановлюється вздовж системи повернення у вихідне положення (8). 147. Система перетворення енергії вітру (1) за п. 145, яка відрізняється тим, що згадані пристрої для створення штучних поштовхів вітру керуються згаданою інтелектуальною системою управління. 148. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона складається з системи для поглинання піків сили натягування згаданих тросів (4). 149. Система перетворення енергії вітру (1) за п. 148, яка відрізняється тим, що згадана система поглинання піків сили натягування обладнана щонайменше однією амортизаційною противагою, яка підіймається з землі та поступально рухається по вертикалі. 150. Система перетворення енергії вітру (1) за п. 149, яка відрізняється тим, що згадана противага підіймається від землі завдяки силі натягування згаданого троса (4). 151. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що вона складається з системи гальмування згаданих тросів (4) для кожного зі згаданих модулів (5). 152. Система перетворення енергії вітру (1) за п. 151, яка відрізняється тим, що згадана система гальмування обладнана щонайменше одним шківом, з'єднаним з лінійним напрямним пристроєм, та щонайменше однією пружиною, прикріпленою одним кінцем до зазначеного шківа та іншім кінцем до згаданого роликового струмознімача (11). 153. Система перетворення енергії вітру (1) за п. 152, яка відрізняється тим, що згадана пружина стискається завдяки згаданому натягуванню згаданого троса (4). 154. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона складається з системи намотування та розмотування (22) згаданого троса (4). 155. Система перетворення енергії вітру (1) за п. 154, яка відрізняється тим, що згадана система намотування та розмотування (22) складається щонайменше з чотирьох перших лебідок (24) для кожного зі згаданих тросів (4), що встановлені на двох рівнях та мають паралельні осі обертання, при цьому згадані перші лебідки (24) з'єднані щонайменше з одним першим електричним двигуном (28), керованим згаданою інтелектуальною системою управління. 156. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що згаданий перший електричний двигун (28) є також електричним генератором. 157. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що згадані перші лебідки (24) з'єднані зі згаданим першим електричним двигуном (28) за допомогою зубчатої передачі та встановлення щонайменше одного редуктора епіциклоїдного типу. 158. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що кожна зі згаданих перших лебідок (24) з'єднується з одним зі згаданих перших електричних двигунів (28) шляхом 96024 14 встановлення щонайменше одного редуктора епіциклоїдного типу. 159. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що навколо кожної зі згаданих перших лебідок (24) намотаний згаданий трос (4) на три чверті кола. 160. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що поверхня згаданих перших лебідок (24) має форму для укриття згаданого троса (4) та збільшує контактну поверхню. 161. Система перетворення енергії вітру (1) за п. 155, яка відрізняється тим, що згадані перші лебідки (24) мають різну шершавість поверхні. 162. Система перетворення енергії вітру (1) за п. 154, яка відрізняється тим, що згадана система намотування і розмотування (22) містить лебідку для кожного зі згаданих тросів (4), при цьому згаданий трос (4) намотується навколо згаданої лебідки, здійснюючи таку обмежену кількість обертань, щоб утворювався один шар звивин. 163. Система перетворення енергії вітру (1) за п. 154, яка відрізняється тим, що згадана система намотування і розмотування (22) для кожного зі згаданих тросів (4) містить щонайменше дві пари зрізаних доріжок, які проштовхуються поршнями, при цьому усередину кожної доріжки вставляється згаданий трос (4). 164. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона містить систему зберігання (23) згаданого троса (4). 165. Система перетворення енергії вітру (1) за п. 164, яка відрізняється тим, що згадана система зберігання (23) складається щонайменше з другої лебідки (25) для кожного з зазначених тросів (4), при цьому на кожну чи з кожної зі згаданих других лебідок (25) намотується або розмотується згаданий трос (4), при цьому згадана друга лебідка (25) з'єднана з другим електричним двигуном (29), керованим згаданою інтелектуальною системою управління. 166. Система перетворення енергії вітру (1) за п. 165, яка відрізняється тим, що згадана друга лебідка (25) з'єднана з другим електричним двигуном (29) встановленням щонайменше одного редуктора епіциклоїдного типу. 167. Система перетворення енергії вітру (1) за п. 165, яка відрізняється тим, що згадана друга лебідка (25) обладнана щонайменше одним ведучим модулем (26), пристосованим для відштовхування згаданого троса (4) з метою здійснення акуратного намотування на згадану другу лебідку (25). 168. Система перетворення енергії вітру (1) за п. 165, яка відрізняється тим, що згадана друга лебідка (25) встановлюється на роликовому струмознімачі, який ковзає вздовж рейки паралельно осі обертання згаданої лебідки (25). 169. Система перетворення енергії вітру (1) за п. 168, яка відрізняється тим, що ковзання згаданого роликового струмознімача вздовж згаданої рейки керується сумісною дією механізму ковзання та обертанням згаданої другої лебідки (25). 170. Система перетворення енергії вітру (1) за п. 169, яка відрізняється тим, що згаданий механізм ковзання приводиться у дію електричним двигу 15 ном, керованим згаданою інтелектуальною системою управління. 171. Система перетворення енергії вітру (1) за п. 170, яка відрізняється тим, що згаданий механізм ковзання приєднаний до згаданого третього електричного двигуна встановленням щонайменше одного редуктора епіциклоїдного типу. 172. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона містить щонайменше одну систему передачі, пристосовану для спрямування згаданих тросів (4) до згаданого повітряного змія (2). 173. Система перетворення енергії вітру (1) за п. 172, яка відрізняється тим, що згадана система передачі містить щонайменше один шків (35), встановлений на згаданому роликовому струмознімачі згаданої системи повернення та відштовхування згаданого повітряного змія (2), щонайменше один фіксований шків (33), безпосередньо прикріплений до згаданого модуля (5), щонайменше один шків для кожної зі згаданих систем для поглинання піків сили натягування згаданих тросів (4), щонайменше один шків для кожної зі згаданих систем для гальмування згаданих тросів (4) та щонайменше один шків (34), установлений на повзунах (27) згаданих приводних модулів (26) згаданих тросів (4). 174. Система перетворення енергії вітру (1) за п. 173, яка відрізняється тим, що згаданий повзун (27) пересувається вздовж рейки паралельно осі обертання згаданої лебідки (25) згаданої системи зберігання (23). 175. Система перетворення енергії вітру (1) за п. 174, яка відрізняється тим, що пересування згаданого повзуна (27) вздовж згаданої рейки управляється сумісною дією механізму ковзання та обертанням згаданої лебідки (25). 176. Система перетворення енергіївітру (1) за п. 175, яка відрізняється тим, що згаданий механізм ковзання приводиться у дію четвертим електричним двигуном, керованим згаданою інтелектуальною системою управління. 177. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана система генерування електроенергії також працює як двигун, при цьому згадана система генерування приводиться у дію поступальним рухом згаданого модуля (5) по згаданій рейці (6), коли працює як генератор, і керується згаданою інтелектуальною системою управління, коли працює як двигун. 178. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) згадана система генерування складається щонайменше з одного генератора/двигуна (20), напряму приведеного у дію обертанням щонайменше одного зі згаданих коліс (16) згаданого роликового струмознімача (11) згаданого модуля (5). 179. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що для кожного зі згаданих модулів (5) вона містить щонайменше одне зубчате колесо (18), яке зчіплюється та котиться по згаданій зубчатій рейці (15) згаданої рейки (6). 96024 16 180. Система перетворення енергії вітру (1) за п. 179, яка відрізняється тим, що для кожного зі згаданих модулів (5) згадана система генерування складається щонайменше з одного генератора/двигуна (21), напряму приведеного у дію обертанням щонайменше одного зі згаданих зубчатих коліс (18) згаданої зубчатої рейки (15). 181. Система перетворення енергії вітру (1) за п. 177, яка відрізняється тим, що для кожного зі згаданих модулів (5) згадана система генерування містить щонайменше один реверсивний магнітний лінійний двигун, пристосований для роботи також і як генератор. 182. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що кожен зі згаданих модулів (5) обладнаний постійними магнітами, при цьому згадані постійні магніти індукують струми у згаданих електромагнітах, за допомогою яких згадана рейка (6) обладнана таким чином, щоб згадані струми частково генерували магнітне поле, яке протидіє індукованому, примушуючи згаданий модуль (5) підійматися у повітря. 183. Система перетворення енергії вітру (1) за п. 182, яка відрізняється тим, що згадані постійні магніти підживлюються надпровідними соленоїдами. 184. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що модульна композиція згаданих постійних магнітів та відповідних електромагнітів, направлених на згадану рейку (6) і на згаданий модуль (5), викликає безперервну зміну індукованих потоків упродовж відносного поступального руху згаданого модуля (5) відносно згаданої рейки (6). 185. Система перетворення енергії вітру (1) за п. 184, яка відрізняється тим, що згадані зміни потоків у згаданих електромагнітах поєднуються з потоками обмоток збору електроенергії. 186. Система перетворення енергії вітру (1) за п. 184, яка відрізняється тим, що згадані обмотки збору електроенергії управляються силовою електронікою. 187. Система перетворення енергії вітру (1) за п. 183, яка відрізняється тим, що згадані постійні магніти виготовляються з неодиму, заліза та бору. 188. Система перетворення енергії вітру (1) за п. 183, яка відрізняється тим, що з'єднання згаданих постійних магнітів зі згаданим роликовим струмознімачем (11) має два ступені свободи, як вісь шарніра кулеподібної форми. 189. Система перетворення енергії вітру (1) за п. 183, яка відрізняється тим, що з'єднання згаданих постійних магнітів зі згаданим роликовим струмознімачем (11) знаходиться у площині центру інерції згаданих постійних магнітів. 190. Система перетворення енергії вітру (1) за п. 1, яка відрізняється тим, що згадана інтелектуальна система управління керує згаданими першою та другою лебідками (24, 25) згаданої системи намотування та розмотування (22) згаданих тросів (4) та згаданої системи зберігання (23) згаданих тросів (2) для спрямування згаданого повітряного змія (2) вздовж згаданої траєкторії польоту. 191. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана інтелекту 17 96024 18 альна система управління містить підсистему самостійного калібрування згаданого набору датчиків згаданого повітряного змія (2). 192. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана інтелектуальна система управління містить підсистему попередження зіткнень між згаданим повітряним змієм (2) та літаючими об'єктами. 193. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана інтелектуальна система управління містить підсистему компенсації змін навантаження на згадані троси(4). 194. Система перетворення енергії вітру (1) за п. 26, яка відрізняється тим, що згадана система живлення містить щонайменше одне джерело живлення. 195. Система перетворення енергії вітру (1) за п. 26, яка відрізняється тим, що згадана система живлення містить щонайменше один трансформатор. 196. Система перетворення енергії вітру (1) за п. 25, яка відрізняється тим, що згадана система живлення містить принаймні один акумулятор. 197. Спосіб виробництва електроенергії за допомогою системи перетворення енергії вітру (1) за п. 1, який відрізняється тим, що для кожного зі згаданих повітряних зміїв (2) включає етапи: а) керування згаданою траєкторією польоту згаданого повітряного змія (2) таким чином, щоб він рухався у поперечному напрямку відносно напрямку згаданого потоку вітру (W), при цьому згадані троси (4), натягнені згаданим повітряним змієм (2) і з'єднані зі згаданим модулем (5) згаданої системи перетворення енергії вітру (1), приводять до поступального руху згаданого модуля (5) по згаданих рейках (6) завдяки дії тяги та відльоту згаданого повітряного змія (2) від згаданого модуля (5) в результаті розмотування згаданих тросів (4) за допомогою згаданих перших лебідок (24), керованих згаданими першими електричними двигунами (28); б) керування згаданою траєкторією польоту згаданого повітряного змія (2) таким чином, щоб згаданий повітряний змій (2) рухався вздовж того самого напрямку згаданого потоку вітру (W), при цьому згадані троси (4), натягнені згаданим повітряним змієм (2) і з'єднані зі згаданим модулем (5) згаданої системи перетворення енергії вітру (1), приводять до поступального руху згаданого модуля (5) по згаданих рейках (6) завдяки дії сили тяги та наближення згаданого повітряного змія (2) до згаданого модуля (5) в результаті перемотування згаданих тросів (4) за допомогою згаданих перших лебідок (24), керованих згаданими першими електричними двигунами (28); в) керування згаданою траєкторією польоту згаданого повітряного змія (2) таким чином, щоб згаданий повітряний змій (2) рухався у поперечному напрямку відносно напрямку згаданого потоку вітру (W), при цьому згадані троси (4), з'єднані зі згаданим модулем (5) згаданої системи перетворення енергії вітру (1), приводять до пересування згаданого модуля (5) по згаданих рейках (6) завдяки дії сили тяги та відльоту згаданого повітряного змія (2) від згаданого модулю (5) в результаті розмотування згаданих тросів (4) за допомогою згаданих перших лебідок (24), керованих згаданими першими електричними двигунами (28); г) керування згаданою траєкторією польоту згаданого повітряного змія (2) таким чином, щоб згаданий повітряний змій (2) рухався у протилежному напрямку відносно напрямку згаданого потоку вітру (W) без утворення будь-якого гальмування згаданого поступального руху згаданого модуля (5) згаданої системи перетворення енергії вітру (1) в результаті перемотування згаданих тросів (4) за допомогою згаданих перших лебідок (24), керованих згаданими першими електричними двигунами (28); та д) повторення попередніх етапів. 198. Спосіб за п. 197, який відрізняється тим, що згадані етапи а) та/або б), та/або в), та/або г), та/або д) виконуються автоматично інтелектуальною системою управління. 199. Спосіб виробництва електроенергії за допомогою системи перетворення енергії вітру (1) за п. 1, який відрізняється тим, що згадані перші двигуни (28) виконують також функції генераторів, виробляючи електроенергію за допомогою обертання згаданих перших лебідок (24). Цей винахід стосується система використання енергії вітру для її перетворення за допомогою поступального руху рейкових модулів, рухомих повітряними зміями. Цей винахід також стосується способу виробництва електроенергії за допомогою такої системи. У минулому вже були спроби вирішити проблему виробництва дешевої електроенергії за рахунок експлуатації поновлюваних джерел енергії; зокрема, у деяких попередніх патентах, вказаних нижче за текстом, в яких запропоновано систему перетворення вітрової енергії, що має декілька пристроїв, які отримують вітряну енергію за допомогою потужних профілів крила (зазвичай означених терміном "повітряний змій"). Зокрема у патенті США за № US 4.124.182 розкривається інформація про пристрій, обладнаний "парашутними повітряними зміями" (або "модифікованими парашутами") для відбору використання енергії вітру і перетворення її у обертальний рух валу, який запускає генератор. Цей пристрій характеризується наявністю пари "ланок парашутних повітряних зміїв", у яких повітряні змії розташовані послідовно. Кожна ланка обладнана силовим тросом. Такі кабелі достатньо довгі для надання ланкам парашутних повітряних зміїв можливості досягати тих висот, де дують вітри, які є більш потужними та однорідними за силою порівняно з вітрами, які виникають на рівні земної поверхні. Кожна ланка закріплюється відповідним потужним тросом до барабану або лебідки, напрямок обер 19 тання котрих може змінюватися таким чином, щоб вони або знову змотували канати чи дозволяли їм розмотуватися завдяки силі тяги потоків вітру. Кожна ланка парашутних повітряних зміїв обладнана другим тросом, так званим "тросом обмеження стелі", приєднаним до кожної ланки парашутних повітряних зміїв, за допомогою якого можливо вибірково "гасити" висоту цих ланок для полегшення процедури перемотування тросів. За допомогою редуктора обертальний рух коленої лебідки передається генератору, котрий, коли запускається, виробляє електроенергію. Існує окрема система шківів, котра за допомогою муфт та зубчатих передач підіймає ланку парашутних повітряних зміїв, тоді як інша система опускає їх донизу. Отже відібрана енергія вітру перетворюється на механічну енергію, котра частково негайно витрачається на повернення ланки парашутних повітряних зміїв, чий трос обмеження стелі закінчився, і частково перетворюється у електричну енергію. В результаті прикріплення аеростатичного повітряного шару до кожної ланки парашутних повітряних зміїв, та підкачки і відкачки повітря з цього шару під час кожного робочого циклу, парашутний повітряний змій утримується на потрібній висоті, а троси обмеження стелі мають фіксовану орієнтацію. Китайський патент за № 1.052.723 розкриває інформацію про генератор використання енергії вітру, обладнаний парою повітряних зміїв, за допомогою котрих сила тяги потоків вітру через троси з високою резистентністю перетворюється в обертання барабану, розташованому на рівні земної поверхні. Лебідка приводить у дію гідравлічний двигун, за допомогою котрого виробляється струм. Британський патент за № 2.317.422 розкриває інформацію про пристрій, обладнаний декількома повітряними зміями, котрі внаслідок дії вітру для отримання струму обертають вертикальний вал, приєднаний до генератора. Вітер рухає повітряні змії по круговій траєкторії у горизонтальній площині. Кожен повітряний змій обладнаний пристроєм, здатним змінювати кут атаки вітру для забезпечення безперервності свого польоту. Патент США за № US 6.072.245 розкриває інформацію про пристрій для використання енергії вітру, який складається з численних повітряних зміїв, зв'язаних тросом та утворюючих кільце. Повітряні змії приводяться у рух для зміни траєкторії підйому на траєкторію зниження, встановлюючи тим самим обертальний рух кільця завжди у одному і тому самому напрямку. Кожен повітряний змій приєднаний до силового тросу для передачі механічної енергії і до системи керуючих рухом тросів для регулювання куту атаки вітру кожного повітряного змія. Силовий трос визначає обертання шківів, які виробляють електроенергію. Керуючі рухом троси використовуються для переведення кожного повітряного змія у положення, котре у випадку траєкторії підйому дозволяє повітряному змію тягнутися вітром догори, і у друге положення, яке у випадку траєкторії зниження дозволяє повітряному змію наражатися на поштовхи вітру меншої сили. Патент США за № US 6.254.034 розкриває інформацію про пристрій, обладнаний повітряним змієм ("прив'язаним ЛА"), який для використання 96024 20 енергії вітру рухається силою вітряних потоків на контрольованій висоті. Повітряний змій за допомогою тросу приєднаний до лебідки, котра запускає генератор для виробництва електроенергії. На борту повітряного змію компонується система керування рухом, яка визначає та змінює кут атаки вітру і змінює фронтальну площу дії перехопленого вітру. Така система управляється з землі оператором, який зчитує виведені на дисплей дані, передані відповідними датчиками або отримані в автоматичному режимі через дистанційну систему управління. Повітряний змій приводиться у рух для підйому за вітром при високому куті атаки. Після завершення підйому кут атаки зменшується, і повітряний змій плавно рухається для переходу у положення руху проти вітру. Повітряний змій повертається назад, знову плавно рухається за вітром, і цей цикл повторюється. Голландський патент за № NL1017171C розкриває інформацію про пристрій, аналогічний попередньому вищеописаному, у якому, однак, не забезпечується ручний режим керування рухом, а повернення повітряного змію відбувається шляхом його нахиляння подібно прапору, яке відбувається для мінімізації поштовхів вітру у випадку розмотування тросів. Патент США за № US 6.523.781 розкриває інформацію про пристрій, який складається з повітряного змію ("повітряний змій з аеродинамічною поверхнею"), через який здійснюється відбір енергії вітру і котрий складається з переднього краю, тильного краю та двох бокових країв. Рух такого повітряного змія керується механізмом, який підтримується польотом самого повітряного змія. Цей пристрій обладнаний тросами, приєднаними до країв повітряного змія, керування рухом котрого здійснюється зміною куту тангажу за допомогою цих тросів. Механізм керування рухом забезпечений електричними кабелями, розташованими всередині силового тросу, котрий з'єднує повітряний змій з лебідкою, яка запускає генератор для виробництва електроенергії. Повітряний змій підіймається силою вітру, використовуючи підйомну силу та рухаючись по траєкторії, яка майже перпендикулярна напрямку швидкості вітру. Після завершення підйому повітряний змій повертається назад і після цього знову отримує керівний імпульс для повторного підіймання вітру. Патентна заявка США за № US2005046197 розкриває інформацію про пристрій, обладнаний повітряним змієм для використання енергії вітру, котрий генерує електроенергію шляхом запуску тросами лебідки, приєднаної до генератору. Повітряний змій приводиться до руху за допомогою додаткових тросів, шляхом котрих змінюється кут атаки проти вітру. Повітряний змій підіймається у випадку високого кута атаки. Після завершення підйому кут атаки мінімізується, і повітряний змій повертається для повторного початку циклу. Заявка на італійський патент за № ТО2006А000491 від того самого Заявника цієї Заявки розкриває інформацію про систему використання енергії вітру для її перетворення, яка складається, щонайменше, з одного повітряного змія, зануреного, щонайменше, у один повітряний потік, 21 рухом котрого можна керувати з землі, та вітряка з вертикальною віссю, розташованого на рівні землі, при цьому такий вітряк обладнаний, щонайменше, одним важелем, з'єднаним з повітряним змієм за допомогою двох тросів, при цьому такий повітряний змій пристосований під керування за допомогою вітряка для обертання важеля і здійснення перетворення вітрової енергії у електричну за допомогою, щонайменше, однієї системи генератордвигун, котра працює як генератор у комбінації з вітряком, при цьому троси пристосовані як для передачі механічної енергії від повітряного змія і навпаки, так і для перевірки траєкторії польоту повітряного змія. У такій системі використання енергії вітру з важелями та валом, що обертається, виробництво електроенергії здійснюється за рахунок використання моменту скручування, який створюється повітряними зміями на важелях турбіни, керування рухом котрих виконується тільки за допомогою тросів. Окрім цього у такій системі використання енергії вітру, обладнаній важелями та валом, що обертається, компоненти, пристосовані для зберігання тросів та приведення до руху повітряних зміїв, знаходяться у центрі вітряка і тому далеко від тієї точки, починаючи з котрої троси відриваються від земної поверхні у напрямку повітряних зміїв. Зрештою у такій повітряній системі з важелями та валом, що обертається, встановлюються трубки для повернення повітряних зміїв. В усякому разі, як можна відмітити за допомогою аналізу існуючого рівня техніки, відомі системи використання енергії вітру, обладнані повітряними зміями, як правило, мають наступні спільні характеристики: - Повітряні змії обладнані як силовими тросами, так і тросами для керування рухом: це означає, що навантаження на трос, з використанням котрого виробляється електроенергія, передається не на приводні механізми повітряного змія, а на інші компоненти системи використання енергії вітру за допомогою тросів, відповідно задіяних для виконання цієї функції. Відсутність застосування силових тросів для керування рухом повітряних зміїв ускладнює структуру системи використання енергії вітру, і надає їй усі пов'язані з цим недоліки; - Повітряні змії приводяться у рух механізмами, які безпосередньо встановлені на повітряних зміях, або за допомогою допоміжних тросів (керування рухом). Розмотування та перемотування цих тросів здійснюється за допомогою лебідок, використовуваних виключно для такої цілі та розташованих на земній поверхні або підвішених над землею (а саме, підтриманих у висячому стані самими повітряними зміями). У випадку використання тросів керування рухом розміщення лебідок на земній поверхні дозволяє не витрачати на утримання ваги механізмів керування рухом частину енергії, відібраної у потоків вітру; - Повітряні змії приводяться у рух для генерування електроенергії під час їх підйому за рахунок використання сили тяги (а саме тієї складової поштовхів вітру, яка йде паралельно швидкості вітру). За цим етапом слідує повернення повітряних зміїв у вихідне положення за допомогою переве 96024 22 дення їх у положення прапорів для того, щоб мінімізувати силу гальмування. Для обмеженої кількості систем використання енергії вітру було придумане застосування підйомної сили (а саме тієї складової поштовху вітру, яка перпендикулярна швидкості вітру) додатково до сили тяга, призначеної для набору висоти повітряними зміями. Перевага, яка виникає в результаті використання цього останнього режиму керування рухом порівняно з попереднім режимом, полягає у тому, що для виробництва електроенергії задіяні не тільки опір повітряного змію, але також і його підйомна сила. В усякому разі в обох режимах робочий цикл переривчастого типу (коли етап підйому чергується з етапом повернення) означав, що дія сили тяги повітряних зміїв, за допомогою котрої виробляється електроенергія, має місце тільки упродовж половини траєкторії, пройденої повітряними зміями (фактично ця сила тяги відсутня під час їх повернення); - Перетворення енергії вітру виникає в результаті прикладення через силові троси сили обертання лебідок приєднаних, ймовірно, через редуктори до генераторів. Такий підхід не дозволяє виробляти електроенергію безперервно під час робочого циклу, оскільки повернення повітряного змія здійснюється в результаті приведення у дію таких лебідок за допомогою двигунів. Таким чином виникає переривання генерування електроенергії, яке супроводжується споживанням її попередньо виробленого обсягу. Безперервне постачання електричного току зовнішнім користувачам можливе у випадку використання акумуляторів; - Увага зосереджена виключно на виробництві електроенергії за допомогою циклічного технологічного способу. Вибір траєкторії, по якій повинні літати повітряні змії для максимізації обсягу перетвореної енергії, майже повністю ігнорується; - Проблеми, пов'язані з системою управління повітряним змієм або ланкою, яка складається з багатьох з'єднаних послідовно повітряних зміїв, детально розглядаються у виключно малій кількості проектів та досліджень. Це також має місце внаслідок того, що сучасні дослідники головним чином зосереджують свою увагу на збільшенні продуктивності вже існуючих систем замість розвитку нових систем виробництва електроенергії. Для часткового вирішення вищезазначених проблем Заявка на Європейський Патент за № ЕР 1672214 від імені Sequoia Automation S.r.l. в якості альтернативи розкриває інформацію про систему для перетворення кінетичної енергії потоків вітру в електроенергію, яке здійснюється за рахунок прогнозної та адаптивної перевірки траєкторії польоту повітряних зміїв, з'єднаних з системою "карусельного" типу, до складу котрої входить вітряк вертикально-осьового типу. Метою цього винаходу є вирішення вищезазначеного рівня техніки за рахунок забезпечення системи використання енергії вітру, призначеної для перетворення механічної енергії в електричну за допомогою поступального руху рейкових модулів, тягнутих повітряними зміями, котра відрізняється від сучасних систем, відомих з рівня техніки, зокрема внаслідок застосування нових режимів 23 керування рухом повітряних зміїв, вибору траєкторії польоту таких повітряних зміїв для максимізації рівня перетвореної енергії та архітектури системи використання енергії вітру, за котрою кожен модуль з'єднаний, щонайменше, одним тросом з ланкою повітряних зміїв, яка рухаючись силою вітру та будучи відповідно керованою, призводить до появи сили тяги на рівні модулів, завдяки котрій модуль послідовно рухається, щонайменше, по одній рейці, яка утворює замкнуту колію та генерує електроенергію через систему її виробництва, що взаємодіє з модулем. Іншою метою цього винаходу є розробка системи перетворення енергії вітру із механічної енергії в електричну за рахунок поступального руху рейкових модулів, тягнутих повітряними зміями, у котрій рух повітряних зміїв керується інтелектуальною системою управління, котра змушує повітряні змії літати за оптимальною траєкторією для оптимізації обсягу енергії, яку можна отримати від вітру. Другою метою цього винаходу є розробка системи перетворення енергії вітру з механічної енергії в електричну за рахунок поступального руху рейкових модулів, тягнутих повітряними зміями, у котрій рух повітряних зміїв, які складають систему перетворення енергії вітру за цим винаходом, керується тими самими тросами, за допомогою котрих механічна енергія передається на модулі системи перетворення енергії вітру. Окрім цього метою цього винаходу є розробка системи перетворення енергії вітру з механічної енергії в електричну за рахунок поступального руху рейкових модулів, тягнутих повітряними зміями, у котрій рух повітряних зміїв керується інтелектуальною системою управління, яка запускає двигуни, приєднані до лебідок ймовірно через редуктори, що розташовані найближче до землі та утворюють єдине ціле з модулями системи використання енергії вітру; такі лебідки працюють як на керування рухом повітряних зміїв за рахунок розмотування та перемотування обмотаних навколо них тросів, так і на утримання навантаження на троси для перетворення механічної енергії на електричну. Іншою метою цього винаходу є розробка системи перетворення енергії вітру з механічної енергії в електричну за рахунок поступального руху рейкових модулів, тягнутих повітряними зміями, у котрій рух повітряних зміїв є керованим для уможливлення перетворення використання енергії вітру, головним чином, за рахунок використання підйомної сили та для надання їх руху такої траєкторії, у межах якої сила тяги діє упродовж майже усього робочого циклу. Додатковою метою цього винаходу є розробка системи перетворення енергії вітру з механічної енергії в електричну за рахунок поступального руху рейкових модулів, тягнутих повітряними зміями, у котрій перетворення механічної енергії здійснюється за допомогою генераторів, які запускаються не за рахунок обертання лебідок, а завдяки поступальному руху модулів системи перетворення енергії вітру. 96024 24 Іншою метою цього винаходу є розробка системи перетворення енергії вітру з механічної енергії в електричну за рахунок поступального руху рейкових модулів, тягнутих повітряними зміями, яка складається з кругової напрямної, щонайменше, з одним модулем, котрий поступально рухається, щонайменше, по одній рейці, та перетворює механічну енергію на електричну, використовуючи поступальний рух модулів внаслідок сили тяги повітряних зміїв, приєднаних до згаданих модулів. Іншою метою цього винаходу є розробка системи перетворення енергії вітру з механічної енергії в електричну за рахунок поступального руху рейкових модулів, тягнутих повітряними зміями, у котрій рухом повітряних зміїв, які складають цю систему, також можна керувати за допомогою інтерцепторів, які розташовані на борту тих самих повітряних зміїв і створюють турбулентності, котрі спричиняють появу градієнтів тиску. Іншою метою цього винаходу є розробка системи перетворення енергії вітру для перетворення механічної енергії у електричну за рахунок поступального руху рейкових модулів, тягнутих повітряними зміями, у котрій компоненти, передбачені для зберігання тросів та приведення до руху ланки повітряних зміїв, знаходяться у кожному модулі поруч з системами повернення повітряних зміїв. Окрім цього метою цього винаходу є розробка системи перетворення енергії вітру з механічної енергії в електричну за рахунок поступального руху рейкових модулів, тягнутих повітряними зміями, у котрій кінцева частина систем повернення повітряних зміїв пристосована під орієнтування з можливістю обертання як у горизонтальній, так і у вертикальній площинах. Іншою метою цього винаходу є забезпечення способу виробництва електроенергії за допомогою системи використання енергії вітру у відповідності до цього винаходу, яка більш ефективно приводиться у дію порівняно з тим, що було запропоновано досягненнями з попередньої предметної області. Вищезазначена та інші цілі і переваги винаходу, як буде визначено з наступного опису, досягаються за допомогою системи використання енергії вітру для перетворення механічної енергії у електричну за рахунок поступального руху рейкових модулів, тягнутих повітряними зміями так, як заявлено у пункті формули винаходу 1. Окрім цього вищезазначена та інші цілі і переваги винаходу досягаються за рахунок способу виробництва електроенергії у системі відповідно до цього винаходу так, як заявлено в пункті формули винаходу 197. Варіанти винаходу, яким надається перевага, та нетривіальні модифікації цього винаходу є темою обговорення у відповідних пунктах. Цей винахід буде краще описаний у деяких його варіантах, яким надається перевага, та забезпечених в якості необмеженого приклада посилаючись на додані фігури, серед котрих: - На Фіг. 1 представлений вигляд у перспективі бажаного варіанту винаходу для системи використання енергії вітру відповідно до цього винаходу; 25 - На Фіг. 2 представлений збільшений вигляд у перспективі бажаного варіанту винаходу з компонентом системи використання енергії вітру з Фіг. 1; - На Фіг. 3 представлений збільшений вигляд у перспективі бажаного варіанту іншого компоненту системи використання енергії вітру з Фіг. 1; - На Фіг. 4 представлений інший вигляд у перспективі компоненту з Фіг. 3; - На Фіг. 5 представлений збільшений вигляд у перспективі системи використання енергії вітру з Фіг. 1; - На Фіг. 6 представлений інший збільшений вигляд у перспективі системи використання енергії вітру з Фіг. 1; - На Фіг. 7 представлений збільшений вигляд у перспективі бажаного варіанту іншого компоненту системи використання енергії вітру з Фіг. 1; - На Фіг. 8 представлений збільшений вигляд у перспективі бажаного варіанту іншого компоненту системи використання енергії вітру, зображеної на Фіг. 1; - На Фіг. 9 представлений збільшений вигляд у перспективі компоненту з Фіг. 8; - На Фіг. 10 представлений вигляд у перспективі бажаного різновиду системи використання енергії вітру відповідно до цього винаходу; - На Фіг. 11 представлений збільшений вигляд у перспективі системи використання енергії вітру з Фіг. 10; - На Фіг. 12 представлений збільшений вигляд у перспективі бажаного варіанту компоненту системи використання енергії вітру з Фіг. 10; - На Фіг. 13 представлений інший вигляд у перспективі компоненту з Фіг. 12; - На Фіг. 14 представлений збільшений вигляд у перспективі бажаного варіанту іншого компоненту системи використання енергії вітру з Фіг. 10; - На Фіг. 15 представлений збільшений вигляд у перспективі бажаного варіанту іншого компоненту систем використання енергії вітру з Фіг. 1 та Фіг. 10; - На Фіг. 16 представлений збільшений вигляд у перспективі бажаного варіанту інших компонентів систем використання енергії вітру з Фіг. 1 та Фіг. 10; - На Фіг. 17 представлений інший збільшений вигляд у перспективі компонентів з Фіг. 16; - На Фіг. 18 представлено схематичне зображення іншого бажаного різновиду системи використання енергії вітру відповідно до цього винаходу у способі виконання нею двох робочих етапів; - На Фіг. 19 представлено збільшене схематичне зображення системи з Фіг. 18; - На Фіг. 20 представлено схематичне зображення фронтального розрізу бажаного варіанту компоненту системи використання енергії вітру з Фіг. 18 у способі виконання нею двох робочих етапів; - На Фіг. 21 представлено схематичне зображення системи відповідно до цього винаходу у способі виконання нею деяких робочих етапів; - На Фіг. 22 представлено схематичне зображення стаціонарної аеродинамічної поверхні у потоці вітру та генеровані у зв'язку з цим і споріднені з цим сили; та 96024 26 - На Фіг. 23 представлено схематичне зображення аеродинамічної поверхні, вільної від пересування у напрямку, перпендикулярному швидкості вітру, та генеровані у зв'язку з цим і споріднені з цим сили. Як можна більш детально побачити з наступного опису, зазвичай вітрова система відповідно до цього винаходу складається, щонайменше, з одного модулю, пристосованого до поступального руху вздовж рейки, що працює як автономний генератор, котрий перетворює у електричний струм енергію вітру, відібрану на тропосферному рівні (який простирається на висоту приблизно 15 км від земної поверхні), бажано, повинен бути виготовлений з розрахунку утворення замкнутого кола кільцевого типу, та приводитися до руху поштовхами, щонайменше, одного потужного повітряного змія, зануреного у потік вітру, з яким він з'єднаний за допомогою, щонайменше, одного тросу. Зокрема майже у кожний модуль надходить механічна енергія, відібрана від вітру за допомогою ланки з'єднаних послідовно повітряних зміїв, які рухаються під управлінням керованих серводвигунами лебідок, роботою котрих в автономному режимі керує інтелектуальна система управління. Посилаючись на Фігури є можливість відмітити, що система системи перетворення енергії вітру 1, відповідно до цього винаходу, складається, щонайменше, з одного потужного профілю крила 2 (також коротко означеного у цій роботі нижче за текстом терміном "повітряний змій"), зануреного, щонайменше, в один потік вітру W і приєднаного за допомогою, щонайменше, одного тросу 4, щонайменше, до одного модулю 5 для генерування електроенергії, який розташовується поруч зземною поверхнею та пристосований для поступального руху вздовж, щонайменше, однієї рейки 6 або 7. Повітряні змії 2 рухаються для протягування модулів 5, з якими вони з'єднані, та уможливлюють перетворення енергію вітру в електроенергію за допомогою, щонайменше, однієї системи генерування, яка складається, щонайменше, з одного генератора/двигуна 20 та/або 21, описаного нижче за текстом і призначеного для кожного модуля 5. Троси 4 пристосовані як для передачі механічної енергії до повітряних зміїв 2 та з них для протягування модулів 5 та для управління траєкторією польоту самих повітряних зміїв 2. У цій роботі нижче за текстом буде описаний бажаний варіант системи перетворення енергії вітру у відповідності до цього винаходу. Окрім цього сюди посилаючись на кожний компонент системи перетворення енергії вітру 1 буде включена послідовність альтернативних характеристик та функціональних можливостей, котрі без погіршення ймовірно досяжного коефіцієнта корисної дії значно зменшують вартість та розмір усієї системи 1. Для досягнення цієї мети комп'ютеризовані способи прийняття рішення на підставі набору численних критеріїв можуть допомогти визначити оптимальні шляхи досягнення найкращих структурних архітектур, а також ті способи управління, чиєю метою є оптимізація експлуатації та продуктивності пристрою. 27 Проектні альтернативи відносяться до безперервного або дискретного типу. Безперервні функції можна легко дослідити за допомогою визначення співвідношення переваг, котрі можна отримати за рахунок внесення змін до таких атрибутів як вартість, вага, опор, довжина та кути, застосовані для отримання рішення. Окремі альтернативи належить перерахувати і описати їх головні характеристики у цій роботі нижче за текстом посилаючись на кожний компонент системи перетворення енергії вітру 1. Отже система перетворення енергії вітру 1 цього винаходу складається з повітряних зміїв 2, виготовлених, наприклад, з тканого волокна, котре зазвичай використовується для виробництва спеціальних вітрил для певних спортивних змагань, таких як, наприклад, серфінг та картинг. В результаті останніх аеродинамічних досліджень на ринку з'явилися повітряні змії 2, котрі здатні задовольнити певні потреби з точки зору їх управління та керованості. За рахунок належного керування повітряними зміями 2 уможливлюється регулювання передачі енергії, отриманої від вітру, - це є істотним, оскільки повітряні змії 2 повинні рухатися таким чином, щоб тяга, отримана від потоків вітру W, виявилася максимальною і в той же самий час не заважала пересуванню модулів 5 по рейкам 6. Отже повітряні змії 2 повинні рухатись для отримання сили тяги, котра сприятиме поступальному руху модулів 5 по рейкам 6 завжди за тим самими напрямком. Такий результат досягається відповідним регулюванням передачі енергії, отриманої від вітру, як буде далі продемонстровано з більшою деталізацією. Коли повітряні змії 2 під час польоту слідують тенденції з підйому нагору, зберігаючи при цьому свою робочу швидкість, аеродинамічний опір тросів 4, приєднаних до опори системи 1, означає виникнення перекосу ланцюгового типу, який змінює кут атаки повітряних зміїв 2, змушуючи їх зайняти позицію для планерування, яка відрізняється підвищеним коефіцієнтом корисної дії. Регулюючи кут атаки повітряних зміїв 2 для того, щоб їх трохи натягнути або відпустити, отримуємо систему з властивим для неї зворотним зв'язком, яка корегує очевидну швидкість повітряних зміїв 2. Потужність, котру повітряний змій 2 здатен відібрати від вітру, є функцією як аеродинамічної якості повітряного змія 2, так і величини його площі. Зокрема така потужність зростає пропорційно квадрату аеродинамічної якості та у лінійній залежності від площі поверхні повітряного змія. Отже для отримання оптимального рішення, яке максимізує потужність, котру повітряний змій 2 здатний отримати від вітру, можна маніпулювати цими обома факторами. Коефіцієнт корисної дії повітряного змію залежить від його форми. Отже вибір оптимальної форми повітряного змію є вирішальним кроком для отримання значних аеродинамічних якостей. Однак таку оптимальну форму належить також зберігати у випадку, коли повітряний змій 2 підлягає навантаженням сили лобового опору та підйомній силі (що краще буде пояснено нижче за текстом). Для досягнення такої мети можна використовувати 96024 28 напівжорсткі повітряні змії 2. На відміну від гнучких повітряних зміїв 2 напівжорсткі повітряні змії 2 обладнані, наприклад, виключно легким каркасом, внаслідок чого такі повітряні змії 2 можуть приймати, наприклад, форму, подібну до жорстких крил планера. Повітряні змії 2 можуть, наприклад, мати форму ромбовидних фігур, виготовлених з полімерів. Використання напівжорсткого каркасу гарантує значне поліпшення коефіцієнту корисної дії не тільки внаслідок кращої аеродинамічної якості повітряного змію, але також і завдяки більшій легкості його керованості. Зокрема жорсткість може бути асиметричною по відношенню до двох розмірів повітряних зміїв 2 для забезпечення бокової гнучкості, корисної для повернення у вихідне положення повітряного змію 2 назад у випадку застосування відповідної системи повернення 8 у вихідне положення, описаної нижче за текстом. Для максимізації потужності, яку система перетворення енергії вітру 1 за даним винаходом повинна бути здатна отримати від потоку вітру W, бажано застосувати для кожного модулю 5 багато повітряних зміїв 2, послідовно взаємно з'єднаних з метою утворення ланки 3 з метою отримання підсумку сил натягування тросів А. Таким чином фронтальна площа опори проти потоку вітру W, який кожний модуль 5 здатний перехопити, зростає. Це призводить до збільшення впливу сили тяги, яка призводить до поступального руху модуля 5, і отже до збільшення обсягу електроенергії, котра може бути генерована під час кожного робочого циклу. Кожна ланка 3 повітряних зміїв 2 з'єднана з модулем 5 за допомогою окремої системи тросів 4: в результаті робочий принцип системи перетворення енергії вітру 1 не залежить від кількості повітряних зміїв 2, які з'єднані послідовно у ланці 3. Така багатошарова конфігурація не тільки збільшує фронтальну площу перехоплення потоку вітру W, але, якщо вона виготовлена як окремий або відповідно агрегований об'єкт, але також і уможливлює поліпшення аеродинамічної якості. Троси 4 фактично можуть бути вбудовані у "стінки" повітряних зміїв 2 (не показані на Фігурах), або самі стінки повітряних зміїв 2 можуть бути з'єднувальним елементом між повітряними зміями 2 (не показаними на Фігурах), почергово виставляючи під вітер ділянку аеродинамічної поверхні та утримуючи зібрану групу повітряних зміїв у вигляді стабільної геометричної фігури. Це дозволяє переміщати троси 4 (і отже тягу, якій вони протидіють) на площі, де досягається максимальна швидкість системи. Для отримання цього результату повітряні змії 2 можна виготовляти у дугоподібній формі, кінцеві стінки котрих простираються для приєднання до інших повітряних зміїв 2, або у формах, які наближаються до вигляду крил літака та обладнані однією або двома з'єднувальними стінками. У цій роботі нижче за текстом для повноти буде зроблене посилання на випадок, коли система перетворення енергії вітру 1 має ланку 3 повітряних зміїв 2 для кожного модуля 5. Кількість перекритих повітряних зміїв 2, робоча площа котрих перекривається іншими повітряними зміями, може довільно зростати. Крім того, якщо повна площа поверхні повітряних зміїв зберігається постійною, 29 то після збільшення кількості повітряних зміїв 2, які утворюють окрему ланку 3, розмір окремого повітряного змія зменшується. Це полегшує маневри повернення та виштовхування повітряних зміїв, як більш детально буде видно після цього. Варіант системи використання енергії вітру 1 відповідно до цього винаходу демонструє, що не всі повітряні змії 2, які належать до тієї самої ланки 3, мають однакові розміри. Повітряні змії 2 у верхній частині ланки 3 мають співвідношення розмірів та відносні аеродинамічні якості, відмінні від повітряних зміїв 2 з нижньої частини ланки. Повітряні змії 2, розташовані якнайближче до модуля 5, таким чином характеризуються більшою площею, а їх розміри зменшуються у напрямку до верхнього кінця ланки 3. Ця конфігурація прийнята до використання, тому що чим далі повітряний змій 2 від модуля 5, до котрого він прив'язаний тросом 4, тим вище його швидкість під час польоту. Отже, якщо слідувати від нижнього до верхнього кінця ланки 3 повітряних зміїв 2, то можна компенсувати збільшення швидкості польоту повітряних зміїв 2 за рахунок поступового зменшення їх поверхні. У такій спосіб потужність, отримана від вітру, однакова для кожного повітряного змія 2 тієї самої ланки 3. Система використання енергії вітру 1 відповідно до цього винаходу складається з тягових тросів 4, пристосованих для передачі зусиль від повітряних зміїв 2 та до них і використаних для протягування модулів 5 з метою перетворення механічної енергії в електричну та перевірки траєкторії польоту самих повітряних зміїв 2. Тягові троси 4 є тим елементом, котрий повинен бути точно визначений за розмірами, оскільки можливе перевищення розмірів неминуче повинно привести до збільшення їх аеродинамічного опору. У варіанті системи перетворення енергії вітру 1 відповідно до цього винаходу забезпечується змінний переріз тросів 4 (не показані на Фігурах). Зокрема переріз тросу поруч з модулями 5 системи перетворення енергії вітру (а саме: перерізи тросів 4. які підлягають безперервним силовим маневрам та торкаються систем, які пристосовані для виконання таких маневрів і описані нижче за текстом) має більший розмір порівняно з перерізом тросів 4 поруч з ланками 3 повітряних зміїв 2. Це дозволяє отримати більшу зносостійкість. Зміна розміру перерізу могла би бути безперервною або мати місце на окремих ділянках з відступами. Для подальшого зменшення тяги перерізів тросів 4, які підлягають впливу більших швидкостей (а саме: тих ділянок тросів 4, що знаходяться поруч з ланками 3 повітряних зміїв 2), переріз тросів поруч з цими ділянками, наприклад, може бути змодельований з врахуванням аеродинаміки у відповідності з застосуванням того повітряного змія, котрий утворює трохи асиметричний підйом з униканням при цьому проявів турбулентності та розгойдування. Наприклад, такого результату можна досягти за рахунок покриття тросів 4 отриманою методом екструзії обшивкою з зіркоподібним перерізом (не показана на Фігурах): таким чином зіркоподібні виступи обшивки відхиляються під впливом дії потоку вітру W доти, доки не буде отримане наближення до руху такого повітряного змія. У випа 96024 30 дку розгойдування виступи утворюють взаємне тертя для поглинання стаціонарної енергії, внаслідок чого таке розгойдування послаблюється. Системи перетворення енергії вітру відповідно до цього винаходу додатково містить щонайменше, з один модуль 5, який поступально рухається, щонайменше, по одній рейці 6, наприклад, за допомогою коліс 16, 17 або магнітної левітації, пристосованої під запуск повітряних зміїв 2, для перетворення енергії потоків вітру в електроенергію. Модулі 5 розташовані поруч з земною поверхнею, і кожен модуль 5 приєднується до ланки 3 повітряних зміїв 2 за допомогою, щонайменше, одного тросу 4, пристосованого для передачі зусилля від повітряних зміїв 2 та до них і використаного для протягування модуля 5 з метою перетворення механічної енергії на електричну та для управління траєкторією польоту самих повітряних зміїв 2. Посилаючись на Фігури, можна відмітити, що кожний модуль 5 системи перетворення енергії вітру містить, щонайменше, один роликовий струмознімач 11, за допомогою котрого модуль 5 поступально рухається, щонайменше, по рейці 6. Форму роликових струмознімачів 11 модулів 5 системи перетворення енергії вітру 1 бажано змоделювати з врахуванням аеродинаміки для мінімізації опору повітря під час роботи системи перетворення енергії вітру 1. Кожен модуль 5 обладнаний усіма необхідними компонентами для автоматичного запуску повітряних зміїв 2 та для генерування електроенергії. Перетворення механічної енергії в електричну здійснюється, наприклад, за допомогою генераторів 20 та/або 21, напряму приєднаних до коліс 16 та 18, які обертаються внаслідок протягування модулів 5 по рейці 6, створюючи систему генерування електроенергії. В якості альтернативи збудженню запуску генераторів 20 та/або 21 за допомогою коліс 16 перетворення механічної енергії в електричну може виникати в результаті реверсивного запуску лінійних магнітних двигунів (не показаних на Фігурі). Отже кожен модуль 5 виступає як генератор, здатний постачати електроенергію незалежно від інших модулів 5. Система перетворення енергії вітру 1 відповідно до цього винаходу додатково складається з інтелектуальної системи управління, котра працює у кожному модулі 5 і за допомогою якої відбувається автоматичне керування польотом повітряних зміїв 2, та системи живлення, що взаємодіє з такою інтелектуальною системою управління для керування накопиченням та поставкою електроенергії, отриманої генераторами 20 та/або 21 під час поступального руху модуля 5 вздовж рейки 6 в результаті протягування повітряних зміїв 2, до яких цей модуль приєднаний тросами 4. Для кожного модуля 5 інтелектуальна система управління здійснює керування рухом ланки 3 повітряних зміїв 2 для використання сили протягування з тим, щоб змусити модуль 5 рухатися по замкнутому колу. Зокрема інтелектуальна система управління взаємодіє з набором датчиків, забезпечених системою автономного живлення і встановлених на повітряних зміях 2, які посилають інформацію, бажано у бездротовому режимі, до 31 розташованих на землі компонентів інтелектуальної системи. Інтелектуальна система управління об'єднує цю інформацію з іншою, яка надходить від набору розташованих на землі датчиків (наприклад, про величину навантаження на троси 4, визначеного шляхом зчитуванням робочих параметрів пари двигунів 28, згаданих більш детально нижче за текстом) та виконує її обробку для автоматичного керування рухом повітряних зміїв 2 під час роботи системи перетворення енергії вітру 1. Що стосується керування рухом повітряних зміїв 2, то система перетворення енергії вітру 1 у відповідності до цього винаходу забезпечує два режими роботи. Перший режим полягає у використанні силових тросів в якості тих, що керують рухом. Отже кожна ланка 3 повітряних зміїв 2 пов'язана з відповідним модулем 5 парою тросів 4. Такі троси 4 спочатку дозволяють протягнути модуль 5 (і отже генерувати електроенергію) завдяки передачі механічної енергії, отриманої від потоків вітру W. Ті самі троси 4 у подальшому розмотуються або перемотуються на відповідних лебідках 24 та 25 для керування рухом ланки 3 повітряних зміїв 2. Другий режим керування рухом складається з використання інтерцепторів (не показаних на Фігурах), розташованих на борту повітряних зміїв 2. За допомогою таких інтерцепторів можна створювати турбулентності, які збільшують градієнти тиску, що керують рухом повітряних зміїв 2. Вищезазначені інтерцептори можуть бути приведені у дію за допомогою, наприклад, п'єзоелектричних систем, полімерів з ефектом запам'ятовування форми та/або волокон металевих сплавів з пам'яттю форми, чиє викривлення активно перевіряється. Така система має автономне живлення чи може живитися через кабелі (не показані), які з модуля 5 йдуть на повітряні змії 2. Сигнали управління рухом інтерцепторів бажано пересилати у бездротовому режимі за допомогою інтелектуальної системи управління. З використанням інтерцепторів стає можливим керування повітряними зміями без необхідності застосування тросів 4. Саме у такому випадку система, яка стежить за маневруванням повітряних зміїв 2, знаходиться на їх борту, а ланку 3 повітряних зміїв 2 можна з'єднати з відповідним модулем 5 за допомогою окремого тросу 4, котрий використовується виключно для передачі сили навантаження та уможливлення протягування модуля 5. Керуванням рухом повітряних зміїв 2 також може трапитись у випадку застосування обох вищезазначених режимів. У підсумку для керування рухом та отримання тяги від повітряних зміїв 2 існують різні підходи у залежності від кількості тросів 4 для керування рухом - одного чи декількох. Окремий трос 4 вимагає можливості виконання маневрів для приведення у дію систем, розташованих на борту повітряних зміїв 2, будучи обмеженим у можливості передачі сили тяги; два троси 4 замість цього частково суміщають функцію керування рухом з функцією сили тяги. Збільшення кількості тросів 4 у подальшому уможливлює додання таких функцій керування рухом як корекція кута атаки повітряно 96024 32 го змія 2, функцій безпеки та швидкого розходження повітряних зміїв у різні боки. Отже у випадку керування рухом за допомогою тросів 4 (з підтримкою з боку інтерцепторів або без неї) кожну ланку 3 повітряних зміїв 2 належить приєднати до відповідного модуля 5 за допомогою пари тросів 4. У випадку керування рухів виключно за допомогою інтерцепторів замість цього використовується окремий трос 4, котрий діє як з'єднувальний елемент між ланкою 3 повітряних зміїв 2 та модулем 5. Отже у такому випадку кількість компонентів модуля 5, які керують рухом або зберігають троси 4, зменшується, що значно спрощує структуру системи перетворення енергії вітру 1. У цій роботі нижче за текстом належить просто зробити посилання на випадок, для якого у системі перетворення енергії вітру 1 відповідно до цього винаходу керування рухом повітряних зміїв 2 відбувається за допомогою пари тросів 4. Для кожного компоненту системи перетворення енергії вітру 1, детально проаналізованого нижче за текстом, так або інакше будуть відмічені спрощення, котрі можна врахувати у випадку використання окремого тросу 4 для протягування кожного модуля 5. Навіть тоді, коли обмеження кількості тросів 4 вигідно з точки зору аеродинаміки, вирішення проблеми у вигляді використання двох тросів 4 також уможливлює виконання аварійних маневрів просто на додаток до їх функцій з керування рухом і отримання сили тяги. Спрямоване керування рухом, зазвичай, реалізується за рахунок обмеженого диференційного змінювання довжини відповідних тросів 4, але якщо диференційне змінювання довжини відповідних тросів 4 перевищує інтервал між крилами повітряних зміїв 2, виникає ситуація, коли підйом, визначений у цій роботі нижче за текстом як "бокове ковзання на крило", не виконується. За цієї умови, якщо виникає потреба у швидкому поверненні, можна швидко перемотати троси 4, не втрачаючи при цьому енергії. Під час такого швидкого спуску внаслідок впливу бокового ковзання на крило, однак, існує ризик обертання повітряного змію 2 навколо подовжньої осі, яке супроводжується суттєвою втратою управління. Для попередження такої втрати управління можна обладнати повітряні змії 2 аеродинамічними пристроями та механізмами, котрі дозволяють легко припинити швидкий спуск повітряних зміїв після досягнення ними бажаної висоти і належним чином відновити регулярні та продуктивні умови польоту. Під час моментів виникнення бокового ковзання на крило боковий край повітряного змію 2 стає краєм кута атаки і місцем розміщення як приборів для фіксації місцеположення цього ЛА у тривимірному просторі, так і системи запуску і стабілізації маневру бокового ковзання (не показані на Фігурах). Згадана система запуску і стабілізації, наприклад, характеризується наявністю розташованих знизу напрямних поплавків та інтерцепторів, керованих інтелектуальною системою управління. В нормальних льотних умовах розташовані знизу напрямні поплавки розташовані упоперек до напрямку поштовху і, прогинаючись, ховаються, щоб не впливати на коефіцієнт корисної дії повітряних зміїв 2. У випадку бокового ковзання на кри 33 ло розташовані знизу напрямні поплавки підіймаються під дією потоку повітря, який з'являється у правильному напрямку. Отже розташовані знизу напрямні поплавки спільно діють під час повторного балансування у випадку проникнення повітряного змію 2 не у свою зону, коли останній невідповідно використовується під час бокового ковзання на крило, пасивним чином поліпшуючи стабільність маневру, що виконується. Додатковий механізм стабілізації активно реалізується за допомогою належно розташованих інтерцепторів/інтерцептора (вже попередньо згаданих), котрі активуються відповідно до геометричної конфігурації логічними схемами, які напряму або через управління з землі використовують інформацію від датчиків стеження за польотом для усунення тенденції до обертання навколо подовжньої осі. Система виконання та стабілізації маневру бокового ковзання уможливлює виконання негайних корекцій/скорочень висоти польоту повітряного змія 2 у випадку спуску і після досягнення останнім потрібної висоти або у випадку розтягнення тросів 4, відновлюючи підйом поверненням до диференційованої довжини тросів 4, сумісної з довжиною тросів під час нормального польоту. У системі перетворення енергії вітру 1 відповідно до цього винаходу застосування системи активації та стабілізації маневру бокового ковзання, головним чином, полягає у швидкому та керованому звільненню місця у повітряному просторі. Система перетворення енергії вітру 1 відповідно до цього винаходу додатково складається, щонайменше, з однієї системи повернення 8 для повітряних зміїв 2 у вихідне положення: у наступному описі система перетворення енергії вітру 1 буде представлена у відповідності до двох бажаних варіантів винаходу, наданих в якості необмеженого прикладу: такі варіанти винаходу, головним чином, відрізняються режимами, при застосуванні котрих підтримується робота систем повернення у вихідне положення 8 повітряних зміїв 2. Відповідно до першого варіанту система перетворення енергії вітру 1 за цим винаходом включає, щонайменше, один модуль 5, що має окремий роликовий струмозмімач 11, поруч з котрим розташовуються як генератори перетворення механічної енергії в електричну 20 та/або 21, так і компоненти системи для керування рухом повітряних зміїв 2. Посилаючись на Фіг. 5-9 можна відмітити, що системи повернення у вихідне положення 8 з'єднані з модулями 5 системи перетворення енергії вітру 1, розташованими поруч з її кінцевою частиною. Вага систем повернення у вихідне положення 8 підтримується витягнутою гнучкою структурою 12, яка складається зі з'єднаних стрижнів 14, котрі закріплюються в кінцевій частині структури приєднаними до систем повернення у вихідне положення 8 і в її іншій кінцевій частині приєднаними до вертикальної структури 13, наприклад, до підпірки, котрою обладнаний кожен модуль 5. Витягнута гнучка структура 12 додатково з'єднує кожен модуль 5 системи перетворення енергії вітру 1, щонайменше, з двома ймовірно прилеглими модулями 5. За рахунок взаємного з'єднання модулів 5 у випадку відсутності дії про 96024 34 тягування у такому модулі 5, його повинні тягнути інші модулі 5, що належать до системи перетворення енергії вітру 1 і у межах котрих дія протягування присутня. Це дозволяє уникнути (або можливо затримати) запуску генераторів 20 та/або 21, застосованих для виробництва електроенергії в якості двигунів, для уможливлення поступального руху модуля 5, і більш детально буде описано нижче за текстом. Відповідно до такого варіанту винаходу системи повернення у вихідне положення 8 також можна обладнати, наприклад, амортизованими колесами 17, за допомогою котрих ці системи спиратимуться на вторинні рейки 7. Таким чином вага систем повернення у вихідне положення 8 не тільки повністю утримується системою з'єднаних стрижнів 14, але й частково опирається на землю. Варіант винаходу усієї системи перетворення енергії вітру 1, обладнаної гнучкими розтягнутими структурними компонентами, які точно об'єднують елементи, що працюють під тиском від систем тягових тросів, поділяє та розподіляє сили та тимчасові навантаження кожної ланки 3 повітряних зміїв 2 на усю систему перетворення енергії вітру 1, впроваджуючи взаємодію між окремими модулями 5 та зменшуючи потребу у збільшенні розмірів. Форма, котру у цілому може прийняти розтягнута гнучка структура 12, є темою аналізу, який належить уважно проводити із застосуванням моделювання, але отримані типи форми характеризуються тенденцією застосування трикутних перерізів, розроблених з дотриманням циліндричної симетрії, яка ідеально співпадає з циліндричною формою солом'яного капелюха або чашки (не показані на Фігурах). Серед навантажень, які повинна витримувати розтягнута гнучка структура 12, існує спрямована по дотичній складова сили тяги повітряних зміїв 2, при цьому сама та складова дійсно виробляє механічну енергію. Однак, як було сказано раніше, витягнута гнучка структура 12 повинна також витримувати вагу систем повернення у вихідне положення 8, зокрема насамперед у екстремальній ситуації, коли немає вторинних рейок 7, а система використання енергії вітру 1 зупинила свою роботу (коли вага систем 8 не підтримується або не полегшується вертикальною складовою сили натягування повітряних зміїв 2). За таких умов уся вага системи 8 статично підтримується витягнутою гнучкою структурою 12, чия геометрична конфігурація має форму кільця (не показана на Фігурах), яка відтворює замкнену траєкторію системи перетворення енергії вітру 1. Таке кільце може працювати за складними режимами роботи, що чергуються та визначені для різних модулів 5. Другий варіант для системи перетворення енергії вітру 1 відповідно до цього винаходу складається, щонайменше, з одного модуля 5, обладнаного, щонайменше, двома роликовими струмознімачами 11, які пересуваються по паралельних рейках 6, розташованих, наприклад, на різних висотах. Посилаючись на Фіг. 10-14, можна відмітити, що відповідно до такого варіанту винаходу для кожного модуля 5 система повернення у вихідне 35 положення 8 з'єднана з двома роликовими струмознімачами 11. Роликовий струмознімач 11 розміщується поруч з кінцевою частиною системи повернення у вихідне положення 8, від котрої троси 4 йдуть до повітряних зміїв 2 і яка обладнана генераторами 20 та/або 21, здійснюючими перетворення механічної енергії у електричну. Інший роликовий струмознімач 11 розташований поруч з іншою кінцевою частиною системи повернення у вихідне положення 8 і обладнаний іншими компонентами, котрі керують рухом повітряних зміїв 2 та відповідальні за збереження тросів 4. Як також повідомлялося стосовно попереднього варіанту винаходу, системи повернення у вихідне положення 8 також можуть бути обладнані, наприклад, амортизованими колесами 17, за допомогою яких ці системи встановлюються на проміжних вторинних рейках 7, котрі сприяють утриманню системи повернення у вихідне положення 8 (не показані на Фігурах). Можна забезпечити обидва роликових струмознімача 11 разом з модулем 5 генераторів 20 та/або 21, призначених для виробництва електроенергії. У цій роботі нижче за текстом буде зроблене посилання на випадок, коли для кожного модуля 5 генератори 20 та/або 21 розміщуються на окремому роликовому струмознімачі 11 у відповідності до попередньо сказаного. Розміщення рейок 6, по котрим на різних висотах пересуваються роликові струмознімачі 11, уможливлює нахил систем повернення у вихідне положення 8 відносно землі у напрямку до ланки 3 повітряних зміїв 2 для забезпечення меншого опору тросам 4, коли працює система перетворення енергії вітру 1. Цей варіант винаходу також забезпечує витягнуту гнучку структуру 12 для з'єднання кожного модуля 5 системи перетворення енергії вітру 1, щонайменше, з двома сусідніми модулями 5. За рахунок взаємного з'єднання модулів 5 у випадку відсутності сили протягування для такого модуля, його повинні тягнути інші модулі 5, що належать до системи перетворення енергії вітру 1, і на котрі діє сила протягування. В обох вищеописаних варіантах винаходу система повернення у вихідне положення 8 повітряних зміїв 2 об'єднується з системою їх повернення та виштовхування (не показано на Фігурах). Пара тросів 4, приєднаних до ланки 3 повітряних зміїв 2, пересікає систему повернення у вихідне положення 8 і переходить на систему передачі, обладнану, щонайменше, однією системою для поглинання піків сили натягування (не показано на Фігурах) тросів 4 та, щонайменше, однією системою забезпечення тертя (не показано на Фігурах) з тросами 4, яка примушує троси 4 рухатись у напрямку системи змотування та розмотування 22, яка складається, щонайменше, з однієї пари з чотирьох лебідок 24 для керування рухом ланки 3 повітряних зміїв 2 та системи зберігання 23 тросів 4, яка складається, щонайменше, з однієї пари лебідок 25. Кожна лебідка 25 систем зберігання 23 обладнана привідним модулем 26, котрий примушує трос 4 акуратно намотуватися на свою відповідну лебідку 25. До того ж троси 4 є з'єднувальним елементом, що передає силу, між повітряними зміями 2 та 96024 36 модулями 5 системи перетворення енергії вітру. Коли ланка 3 повітряних зміїв 2 підіймається потоком вітру W вгору, генерується сила протягування, котра утворює поступальний рух модуля 5 і в результаті енергія вітру перетворюється на електроенергію за допомогою генераторів 20 та/або 21. Очевидно, що довжина та діаметр кожного тросу 4 залежить від умов дії вітру та безпеки роботи тросу. Система перетворення енергії вітру 1 відповідно до цього винаходу додатково складається, щонайменше, з рейки 6, по котрій здійснюється поступальний рух модулів 5, які тягнуть повітряні змії 2. Як попередньо встановлено, модулі 5 системи перетворення енергії вітру 1 можуть поступально рухатись по багатьом рейкам 6 та 7 для розподілу ваги систем повернення у вихідне положення 8 для повітряних зміїв 2. Бажано, щоб рейки 6 та 7 утворювали замкнуту колію. Одностороння траєкторія має вигляд кола, але вона придатна для вибору шляху для оптимізації використання енергії вітру. Наприклад, якщо припустити створення системи перетворення енергії вітру 1 у місцевості, де потік вітру W дує, головним чином, в одному напрямку, зручно, щоб модулі 5 системи використання енергії вітру 1 рухались за еліптичною траєкторію, велика ось котрої перпендикулярна напрямку потоку вітру W. Такий вибір обумовлений тим фактом, що протягування модулів 5 системи перетворення енергії вітру 1 за допомогою повітряних зміїв 2 трапляється в результаті використання складової підйомної сили, яка генерується тоді, коли потоки вітру зустрічаються з повітряними зміями 2 так, як краще буде визначено нижче за текстом. Якщо рейки 6 та 7 утворюють замкнуту колію, то на модулі 5 системи перетворення енергії вітру 1 діє відцентрова радіальна сила, яка виникає внаслідок руху модулів 5 та радіальної складової сили натягування ланки 3 повітряних зміїв 2. Для протидії такій силі може виявитися придатним відповідний нахил рейки 6 системи перетворення енергії вітру 1 (не показано на Фігурах). Нахил рейки 6 можна легко простежити та визначити його розмір за допомогою декомпозиції сил, які діють на колеса 16 модулів 5. Очевидно, що коли модулі 5 системи перетворення енергії вітру 1 здійснюють поступальний рух по багатьом рейкам 6 та 7, то такі рейки 6 та 7 повинні йти паралельно і утворювати концентричні кола. Бажано, щоб рейки 6 та 7 не розміщувались на землі, а зберігалися піднятими за допомогою опор. Якщо утримувати модулі 5 на відповідній висоті, то немає ризику ковзання повітряних зміїв 2 по землі у разі їх випадкового падіння донизу. Структури, підтримуючі рейки 6 та 7, повинні мати велику інерцію для забезпечення високої стабільності та для задовольняння вимоги геометричної точності, потрібної для роликового струмознімача 11 системи перетворення енергії вітру 1. Як попередньо зазначено, коли система перетворення енергії вітру 1 має багато рейок 6 та 7, то зручно розмішувати рейки 6 на різних висотах для збереження систем повернення у вихідне положення 8 нахиленими відносно землі у напрямку 37 ланок 3 повітряних зміїв 2. Це зменшує опор тросам 4 з боку систем повернення у вихідне положення 8 під час роботи системи використання енергії вітру 1. Рейки 6 та 7, котрими обладнана системи перетворення енергії вітру 1, можуть бути поділені на дві категорії. Є можливість визначати місце розташування головних рейок 6 та вторинних рейок 7. Головними рейками 6 є ті рейки, по котрим поступально рухаються роликові струмознімачі 11 модулів 5, що належать системі перетворення енергії вітру 1. Вторинні рейки 7 є напрямними пристроями, по яких поступально рухаються амортизовані колеса 17 і котрі сприяють утриманню ваги систем повернення у вихідне положення 8 повітряних зміїв 2. Рейки 6 та 7 системи перетворення енергії вітру цього винаходу можуть бути класичними або магнітними у залежності від того, чи модулі 5 системи перетворення енергії вітру 1 пересуваються виключно за допомогою коліс 16, 17 або шляхом магнітної левітації. Зокрема вторинні рейки 7 бажано виготовляти за класичним типом, тоді як головні рейки 6 також можуть бути магнітними. Головні рейки у класичному варіанті 6 мають таку форму, яка "обіймає" нижню частину роликових струмознімачів 11, котрі нею пересуваються. Як буде краще пояснено нижче, роликові струмознімачі 11 модулів 5 системи використання енергії вітру 1, котрі пересуваються по рейкам класичного типу 6, обладнані трьома групами коліс 16. Якщо зосередити увагу на окремому модулю 5, то група коліс 16 повинна утримувати більшу частину ваги модуля 5 у вертикальному напрямку; інші дві групи коліс 16 сприяють запобіганню перекидання модуля 5 в результаті дії відцентрової сили. Головні рейки класичного типу 6 встановлюються для уможливлення обертання коліс 16 по двох горизонтальних площинах (нижня площина та верхня площина) та по вертикальній площині. Для досягнення такої мети переріз рейок 6 приймає, наприклад, вигляд двох направлених один проти одного зображень "Cs" біля їх угнутої частини так, як, зокрема, показано на Фіг. 12. Як альтернатива така конфігурація поруч з вторинними рейками 7 непотрібна, якщо ці рейки відносяться виключно до класичного типу, і чия функція полягає тільки у сприянні підтримки систем повернення у вихідне положення 8 повітряних зміїв 2. Амортизовані колеса 17 фактично обертаються в окремій площині, а рейки 7 виявляються звичайними напрямними пристроями. В якості альтернативної "С"-конфігурації також можна виготовити головні рейки класичного типу 6, котрі, наприклад, матимуть, наприклад, прямокутний переріз і як альтернативу цьому встановити групи коліс 16 для роликових струмознімачів 11 модулів 5, що утворюють повітряну систему 1 таким чином, щоб охопити рейку 6 (не показано на Фігурах). Інший альтернативний варіант винаходу зрештою полягає у виконанні заміни рейки 6 за принципом "розгін-гальмування" по відношенню до коліс 16, а саме: у протягуванні коліс, які складають єдине ціле зі шпалою та рейкою, повітряними змі 96024 38 ями 2 по такій рейці для розташування на фіксованій частині цієї системи усіх генераторів змінного току, прикріплених шпонками до коліс (не показано на Фігурах). Перевага, запропонована таким варіантом винаходу, полягає в улаштуванні простого електричного з'єднання без потреби у застосуванні розподільника або контактів, що ковзають. У випадку використання головних рейок класичного типу 6, що краще буде пояснено нижче за текстом, перетворення енергії може здійснюватися, наприклад, шляхом прямого запуску генераторів 20 за рахунок обертання коліс 16. Однак у випадку подачі високої напруги на кожен модуль 5 рейки класичного типу 6 можуть виявитися непридатними для уможливлення запуску генераторів 20 за рахунок обертання коліс 16. Обертальний момент, який належить передати до генераторів 20, фактично може виявитися занадто високим, щоб його можна було отримати звичайним використанням тертя качання між рейкою 6 та колесами 16, а опір качання може виявитися тим, який має місце при качанні коліс 16 по рейці 6. У такому випадку так або інакше для генерації струму без застосування лінійних двигунів у реверсивному режимі, для уникнення дисипації енергії та уможливлення перетворення механічної енергії у електричну можна встановити рейку 6 класичного типу разом, щонайменше, з одною зубчатою рейкою 15, за котру чіпляється, щонайменше, одне зубчате колесо 18, яке напряму запускає генератор 21. Як краще буде описане нижче за текстом, у такому випадку колеса 16 роликових струмознімачів 11 виконують переважно функцію підтримки. Зубчата рейка 15 накладається на рейку класичного типу 6 для того, щоб її зубчата поверхня прилягала перпендикулярно до поверхні рейки 6 і орієнтувалася на центр замкнутої колії, сформованої рейками 6. Зубчате колесо 18, яке зачіпляється за зубчату рейку 15 і обертається по ній, розташовано горизонтально і завдяки цій конфігурації протидіє відцентровій силі. Відцентрова сила, дії котрій підлягає кожен модуль 5, потім застосовується (і у той самий час протиставляється) для забезпечення надійного пересування зубчатого колеса 18 по зубчатій рейці 15. Якщо буде застосована магнітна левітація, то головні рейки 6 будуть обладнані електромагнітами і виготовлені з відповідного матеріалу для уможливлення магнітного підвішування та/або перетворення механічної енергії у електричну за допомогою лінійних двигунів, застосованих у реверсивному режимі для генерування електроенергії, що краще буде пояснено нижче за текстом. Стосовно магнітної левітації пам'ятайте, що у теперішній час можна звернутися до трьох технологій: - Електромагнітне підвішування: левітація досягається за допомогою звичайних електромагнітів (можливо охолоджених до їх точки надпровідності), розміщених наприкінці пари структур роликового струмознімача 11, який намотаний на сторони та нижню частину рейки 6. Магніти притягуються до рейки 6 і таким чином підтримують роликовий струмознімач 11; 39 - Електродинамічного підвішування: левітація здійснюється з використанням електромагнітів, охолоджених до їх точки надпровідності і розміщених на роликовому струмознімачі 11. Поруч з боковими стінками рейки 6 знаходяться обмотки у формі "вісімки", в яких магнітне поле, що генерується за допомогою напівпровідникових обмоток, розташованих на роликовому струмознімачі 11, індукує струми, завдяки котрим поруч з кожною половинкою "вісімки" створюються протилежні магнітні полюси. Магнітні полюси на більш високому рівні притягують магнітне поле напівпровідників роликового струмознімача 11, а магнітні поля на більш низькому рівні відштовхують їх. Така комбінація притягнення та відштовхування дозволяє роликовому струмознімачу 11 підійматися у повітря; - Підвішування за допомогою постійних магнітів: левітація досягається за рахунок розташування постійних магнітів на роликовому струмознімачі 11 та електромагнітів без живлення на рейці 6. Коли струмознімач рухається, постійні магніти індукують струми в електромагнітах на рейці 6, котрі генерують магнітне поле, відштовхуюче по відношенню до поля, утвореного постійними магнітами. Таке відштовхування примушує роликовий струмознімач 11 підійматися у повітря. У системі перетворення енергії вітру 1 відповідно до цього винаходу у випадку левітації застосовною технологією є переважно та, яка забезпечує магнітне підвішування за допомогою постійних магнітів, поле котрих може сумуватися з магнітним потоком, генерованим надпровідними соленоїдами. Конфігурація магнітів та електромагнітів на рейці 6 та на роликових струмознімачах 11 модулів 5, і принцип за яким реалізується левітація, будуть детально описані нижче за текстом разом з режимами, при застосуванні котрих здійснюється перетворення механічної енергії у електричну і отже виробництво струму. Як можна краще встановити нижче за текстом, навіть у випадку магнітної левітації, доцільно застосовувати роликові струмознімачі 11 модулів 5 системи перетворення енергії вітру 1 з колесами 16, котрі сприяють збереженню повітряного зазору між магнітами модулів 5 та рейками 6. Колеса 16, котрі використовуються виключно для збереження повітряного зазору, подібні, наприклад, до трьох груп коліс 16, що належать роликовим струмознімачам 11, котрі рухаються по згаданих раніше головних рейках класичного типу 6. Отже у випадку використання магнітної левітації головна рейка 6 може бути виготовлена у вигляді комбінації між вищезазначеною рейкою класичного типу (з конфігурацією у вигляді подвійної "С" або з альтернативною конфігурацією) та магнітною рейкою. Отже кожний модуль 5 системи використання енергії вітру 1 обладнаний, щонайменше, одним роликовим струмознімачем 11, за допомогою котрого модуль 5 поступально рухається, щонайменше, по одній рейці 6. Зокрема, як вже повідомлялось раніше, модулі 5 можуть бути обладнані окремим роликовим струмознімачем 11, на жому розташовані обидва генератори 20 та/або 21 та компоненти для керування рухом повітряних зміїв 96024 40 2 і зберігання тросів 4. А другий варіант винаходу полягає у забезпеченні кожного модуля 5 двома роликовими струмознімачами 11: один з них розташований на більшій висоті та обладнаний компонентами, які здійснюють перетворення механічної енергії в електричну, а другий - на меншій висоті, і на ньому розташовані лебідки 24 та 25, на котрі намотуються троси 4. Бажано використовувати два режими пересування роликового струмознімача 11 по рейці: - У випадку застосування рейки класичного типу 6 роликовий струмознімач 11 поступально рухається по рейці 6 за допомогою гладких коліс 16 та 17; - У випадку застосування магнітної рейки 6 роликовий струмознімач 11 поступально рухається по рейці 6 за допомогою постійних магнітів та/або електромагнітів, використовуючи принцип магнітної левітації. Якщо роликовий струмознімач 11 поступально рухається по рейці 6 за допомогою коліс 16, то такі колеса 16 стикуються з рештою модулю 5 системи перетворення енергії вітру 1, наприклад, за допомогою пружин, з'єднаних паралельно з демпферами. Отже модуль 5 є амортизованим. Як вже попередньо повідомлялося, можна поділити колеса 16, якими обладнані роликовий струмознімач 11, разом з модулем 5 на три групи. Колеса 16, котрі належать до різних груп, взаємно розташовані перпендикулярно у Т-образній конфігурації. Зокрема, якщо припустити розташування рейки 6 у горизонтальній площині, то існують: - Колеса 16, що котяться у горизонтальній площині і підтримують найбільшу частину ваги роликового струмознімача 11; - Колеса 16, що котяться у вертикальній площині і протидіють радіальній силі, котра впливає на роликовий струмознімач 11; - Колеса 16, що котяться у горизонтальній площині і запобігають перекиданню роликового струмознімача 11. Завдяки присутності цієї системи коліс 16 роликовий струмознімач 11 утримується у каркасі рейки 6, що запобігає будь-якій зміні його положення, котра може призвести до сходження цього роликового струмознімача з рейки. Такий результат отримується внаслідок надання рейці класичного типу 6 відповідної форми. Зокрема, як попередньо встановлено, можна виготувати рейку 6 таким чином, щоб вона мала переріз у вигляді подвійного С"С, з тим, щоб рейка 6 "обнімала" нижню частину роликового струмознімача 11. В якості альтернативи можна використати загальний тип рейки, наприклад, рейку з прямокутним перерізом, і розташувати колеса 16 на роликовому струмознімачу 11 таким чином, щоб ті самі колеса 16 охоплювали рейку 6 (не показано на Фігурах). Незалежно від прийнятого варіанту винаходу окремі колеса 16 не приєднані напряму до плоскої основи роликового струмознімача 11, а об'єднані у роликових струмознімачах 19, котрі, у свою чергу, приєднані до вищезазначеної плоскої основи. Таке рішення, також прийняте у залізничному транспорті, робить систему більш стабільною. 41 У випадку застосування магнітної рейки 6 повітряний зазор між магнітами модуля 5 та електромагнітами рейки 6 суттєво зменшується, і з цієї причини виникає ризик, що модуль 5 та рейка 6 торкнуться одне одного. Це має місце завдяки як значній масі модулів 5 системи перетворення енергії вітру 1 - предмета цього винаходу, так і типу та величині навантажень на такі модулі 5. Для забезпечення збереження повітряного зазору доцільно звернутися до використання роликових струмознімачів магнітної левітації 11, також обладнаних колесами 16, котрі виконують виключно функцію підтримки модуля 5 без паралельного генерування електроенергії. Такі колеса 16, наприклад, можуть бути ідентичними колесам, за допомогою котрих роликовий струмознімач 11 поступально рухається по рейці класичного типу 6. Як раніше встановлено, у випадку застосування магнітної левітації рейка 6, по котрій поступально рухаються модулі 5, може бути виготовлена у вигляді комбінації рейки класичного типу та магнітної рейки. На додаток до збереження повітряного зазору використання підтримуючих коліс 16 може виявитися так або інакше необхідним у випадку застосування підвішування з використанням постійних магнітів, яке розглядається як технологія підвішування за допомогою магнітів. У випадку схвалення такої технології відштовхуюче магнітне поле фактично може бути генероване тільки за умови наявності руху, і отже після прийняття такої гіпотези магнітна левітація у випадку, коли модуль 5 не рухається, буде неможливою. Наявність підтримуючих коліс 16 гарантує, що навіть за відсутності магнітної левітації модулі 5 та рейка 6 не торкаються одне одного. Умови можливого вимушеного руху модуля 5 без підвішування за допомогою магнітів стають більш кращими. Системи повернення у вихідне положення 8 є компонентами модулів 5 системи перетворення енергії вітру 1, які використовуються для повернення повітряних зміїв 2 у вихідне положення. Система перетворення енергії вітру 1 обладнана однією системою повернення у вихідне положення 8 для кожного модуля 5. Система повернення у вихідне положення переважно складається, щонайменше, з однієї циліндричної труби, призначеної для зберігання у ній цілої ланки 3 повітряних зміїв 2. З цієї причини системи повернення у вихідне положення 8 знаходяться серед найбільш громіздких та більш важких компонентів системи перетворення енергії вітру 1. Системи повернення у вихідне положення 8 можуть бути спроектовані як ті, що реагують на силу гравітації своєю власною вагою супротив складовій вертикальної тяги повітряних зміїв 2. Хоча складова натягування повітряних зміїв 2 по вертикалі сприяє підтримці ваги систем повернення у вихідне положення 8, доцільно проектувати модулі 5 системи перетворення енергії вітру 1 з метою запобігання можливості їх перекидання внаслідок ваги систем повернення у вихідне положення 8. Це стає необхідним також з причини наявності складової вертикального натягування повітряних зміїв 2 тільки тоді, коли системи перетворення енергії вітру 1 працює. Коли системи перетворення енергії вітру 1 знаходиться у стаціона 96024 42 рному стані, то уся вага систем повернення у вихідне положення 8 опирається на рейки 6. У випадку використання окремого шківу 11 для кожного модуля 5 система повернення у вихідне положення 8 з'єднана з роликовим струмознімачем 11, розташованим поруч з її кінцевою частішою, звідкіля троси 4 простягаються до повітряних зміїв 2. Отже для уникнення ситуації, коли система повернення у вихідне положення 8 стає причиною перекидання модуля 5, вага такої системи 8 підтримується за допомогою розтягнутої гнучкої структури 12 і ймовірно амортизованих коліс 17, приєднаних до системи повернення у вихідне положення 8, яка пересувається по вторинній рейці 7. Якщо модулі 5 системи використання енергії вітру 1 обладнані двома роликовими струмознімачами 11 для кожного модуля 5, то система повернення у вихідне положення 8 з'єднана з такими роликовими струмознімачами 11 біля своєї кінцевої частини. Отже розташована у самій середині рейка 6 знаходиться на меншій висоті так, щоб система повернення у вихідне положення 8 відповідно нахилялась для мінімізації опору руху тросів 4 під час роботи системи перетворення енергії вітру 1. Зокрема системи повернення у вихідне положення 8 нахилені догори відносно горизонтальної площини (як, зокрема, показано на Фіг. 6 та 11). Такий нахил також здійснюється у випадку використання окремого роликового струмознімача 11 для кожного модуля 5, наприклад, за рахунок розташування на зменшених висотах вторинних рейок 7, по котрих рухаються амортизовані колеса 17, які підтримують систему повернення у вихідне положення 8. Незалежне від застосування одного або двох роликових струмознімачів 11 для кожного модуля 5 кінцева частина 10 систем повернення у вихідне положення 8 компонується таким чином, щоб її можна було орієнтувати як у горизонтальній, так і у вертикальній площині. Це дозволяє полегшити виконання операцій повернення у вихідне положення та відштовхування повітряних зміїв 2 і здійснення часткової амортизації тимчасових складових дії сили. Зокрема збільшення нахилу кінцевої частини 10 систем повернення у вихідне положення 8 відносно горизонтальної площини під час операції відштовхування повітряних зміїв 2 робить можливим розміщення верхньої частини систем 8 на висоті, яка за рахунок розтягування значно змінює час, необхідний для регулювання положення повітряних зміїв 2 протягом польоту та позиції тих повітряних зміїв 2, які стартували з більшої висоти. Під час операцій повернення у вихідне положення повітряних зміїв 2 кінцева частина 10 системи повернення у вихідне положення 8 вирівнюється відносно решти системи 8 для полегшення виконання такої операції. Отримується здатність кінцевої частини 10 системи повернення у вихідне положення 8 бути орієнтованою, наприклад, за допомогою, щонайменше, одного шарнірного з'єднання 9, яке розташоване поруч з верхньою частиною системи 8, та пересування кінцевої частини 10 над шарнірним з'єднанням 9 за допомогою системи з трьох тросів 43 31, кожний з котрих приєднується, щонайменше, до одного гідравлічного циліндра 32, з'єднаного завісою з системою повернення у вихідне положення 8 на ділянці, розташованій поруч з шарнірним з'єднанням 9. Ці гідравлічні циліндри 32 приводяться у дію гідравлічною системою, якою керує інтелектуальна система управління. В якості альтернативи гідравлічним циліндрам 32 можна використовувати лінійні електромеханічні модулі (не показані на Фігурах). Якщо модулі 5 системи використання енергії вітру 1 обладнані двома роликовими струмознімачами 11 для кожного модуля 5, то роликовий струмознімач 11, розташований поруч з вихідним краєм системи повернення у вихідне положення 8, приєднаний до тією частини, котра неспроможна бути орієнтованою у межах системи повернення у вихідне положення 8 у напрямку, протилежному від шарнірного з'єднання 9. Якщо система використання енергії вітру 1 відповідно до цього винаходу обладнана окремим роликовим струмознімачем 11 для кожного модуля 5, то можливий варіант винаходу для системи перетворення енергії вітру 1 (не показаний на Фігурах) забезпечує необов'язковість здатності орієнтуватися тільки кінцевої частини 10 систем повернення у вихідне положення 8. Шарнірне з'єднання 9, яке дозволяє орієнтуватися, можна розмістити у будь-якій точці системи повернення у вихідне положення 8 або на початку її системи координат 8, що робить усю систему 8 здатною до орієнтування. Також у цьому варіанті винаходу кінцева частина 10 систем повернення у вихідне положення 8 може рухатись, наприклад, у межах вищезазначеної системи за допомогою тросів та гідравлічних циліндрів. Якщо уся система повернення у вихідне положення 8 здатна до орієнтування, то маневр можна виконувати за допомогою розтягнутої гнучкої структури 12, яка підтримує виконання таких маневрів. Для полегшення проходження ланки 3 повітряних зміїв 2 під час їх повернення у вихідне положення та запуску вихідний край систем повернення у вихідне положення бажано виготовити куполоподібним, а розташована поруч з таким вихідним краєм кінцева частина 10 систем повернення у вихідне положення 8 має переріз, який збільшується у напрямку до вихідного краю. Функція збереження повітряних зміїв 2 припускає уможливлення зупинки роботи систем повернення у вихідне положення 8 операторами для виконання можливих робіт з технічного обслуговування. Форма систем повернення у вихідне положення 8 може бути тільки циліндричною, але якщо оцінки опору аеродинамічного обертання та структурного опору запропонують іншій підхід, то системи повернення у вихідне положення 8 можуть бути сконструйовані з підпірками (не показані на Фігурах), де керованість та стримування повітряних зміїв 2 здійснюється за допомогою мережі надування стінок підпірок. Мінімальний переріз підпірок має трикутну форму, що підтримує достатній простір для збереження повітряних зміїв 2 і проходження тросів 4. Спеціальна заплутаність мережі 96024 44 надування запобігає можливому заїданню тросів у випадку ковзання ланки 3 повітряних зміїв 2 під час їх виштовхування та повернення у вихідне положення. Всередині кожної системи 8 розташована система, за допомогою котрої здійснюється виштовхування та повернення у вихідне положення повітряних зміїв 2 разом з супроводжуючими їх тросами 4. Система 2 для повернення у вихідне положення та виштовхування повітряних зміїв 2 є компонентом модулю 5 системи перетворення енергії вітру 1, розташованим всередині системи повернення у вихідне положення 8, за допомогою котрої відповідно здійснюється повернення у вихідне положення і виштовхування повітряних зміїв 2, коли система перетворення енергії вітру 1 зупиняє та починає свою роботу. Система перетворення енергії вітру 1 відповідно до цього винаходу, наприклад, може бути обладнана тими самими системами повернення у вихідне положення та виштовхування, якими обладнана система перетворення енергії вітру, забезпечена важелями та валом, що обертається, інформація про котрі була розкрита у попередньо зазначеній італійській заявці на винахід № ТО2006А000491, на яку можна зробити посилання для більш детального пояснення. У комплексі кожна з цих систем повернення у вихідне положення та відштовхування обладнана роликовим струмознімачем, який поступально рухається на двох рейках, котрі примушують його поступально рухатися всередині відповідної системи повернення у вихідне положення 8 і паралельно осі такої системи 8. Пара систем вихідних шківів 35 тросів 4 компонується на роликовому струмознімачу. У випадку застосування окремого тросу 4 в якості з'єднувального елементу між модулем 5 системи перетворення енергії вітру 1 та ланкою 3 повітряних зміїв 2 існує окрема система вихідних шківів 35 тросу 4, скомпонована на згаданому роликовому струмознімачу. Після повернення у вихідне положення ланки 3 повітряних зміїв 2, коли повітряні змії 2 розташовуються поруч з системою повернення у вихідне положення 8, їх встановлюють паралельно осі системи повернення увихідне положення 8 (за допомогою пари тросів 4 та/або інтерцепторів) для полегшення входу у таку систему 8. Полегшення відштовхування та повернення у вихідне положення повітряних зміїв 2 можна досягнути використанням струменів стиснутого повітря, яке відповідним чином випускається для відштовхування та керування повітряними зміями 2 без необхідності їх контакту. Пристрої для отримання цих штучних поривів вітру (не показані на Фігурах) можна розташувати уздовж систем повернення у вихідне положення і в кінцевій частині 10. Маневри виконуються за допомогою численних місць імітації вітру, чия геометрична позиція повинна цілком уможливити ряд ступенів свободи, і роботою котрих керує інтелектуальна система управління для створення точного та швидкого пристрою керування. 45 Такі самі пристрої імітації штучних поривів вітру можуть допомогти вернути у вихідне положення ланку 3 повітряних зміїв 2. Фактично за допомогою цих пристроїв можна створювати штучні потоки повітря, застосування котрих забезпечуватиме керованість повітряних зміїв 2, коли згадані змії знаходяться поруч з системами повернення у вихідне положення 8. Запуск повітряних зміїв 2, щонайменше, потребує наявності легкого вітерцю на рівні землі. У випадку недостатнього вітру на низьких висотах двигуни 20, згадані нижче за текстом, запускаються для старту модулів 5 системи перетворення енергії вітру 1 з метою утворення штучного вітерцю, котрий уможливлює підйом повітряних зміїв 2 у повітря. Система перетворення енергії вітру 1 обладнана системою повернення у вихідне положення та відштовхування повітряних зміїв 2, розташованою поруч з кожним модулем 5. Альтернативне рішення стосовно повернення у вихідне положення повітряних зміїв 2 полягає у розміщенні систем повернення у вихідне положення 8 на землі замість модулів 5 системи перетворення енергії вітру. Таке рішення означає отримання великих переваг. У першу чергу кожний модуль 5 системи перетворення енергії вітру обладнаний окремим роликовим струмознімачем 11 (оскільки зовнішній роликовий струмознімач, пристосований для підтримки системи повернення у вихідне положення 8, більше не потрібен), і тому система перетворення енергії вітру матиме окрему рейку 6. Інша перевага полягає у тому, що інерція кожного модуля 5 значно зменшується порівняно з рішенням у вигляді поєднання систем повернення у вихідне положення 8 з модулями 5, і отже енергія, котру належить витратити на запуск системи перетворення енергії вітру, є меншою. Зрештою аеродинаміка роликових струмознімачів системи перетворення енергії вітру краща, оскільки аеродинамічне тертя більше неприсутнє завдяки системам повернення у вихідне положення 8. Це дозволяє підвищити ефективність перетворення механічної енергії у електричну за тої самої енергії вітру, відібраної повітряними зміями 2. Системи повернення у вихідне положення 8, розташовані на землі, можуть мати вигляд, наприклад, контейнерів з закріпленою відкидною кришкою, які встановлені біля землі. Згадані контейнери мають форму, пристосовану для розміщення, щонайменше, однієї ланки З повітряних зміїв 2. У горизонтальній площині системи повернення у вихідне положення 8 розташовуються радіально і можуть розмішуватися усередині та зовні замкнутої колії, розташування якої визначається рейкою 6. Що стосується нахилу систем повернення у вихідне положення 8 відносно землі під час операцій повернення у вихідне положення та зльоту повітряних зміїв, то вони нахилені догори (для полегшення таких операцій), тоді як протягом періоду часу, що залишився, системи повернення у вихідне положення 8 розташовуються майже горизонтально. Зокрема кожна система повернення у вихідне положення 8 здатна здійснювати два рухи: 96024 46 обертально-поступальний рух та рух занесення ланки зміїв до місця зберігання. Обертально-поступальний рух складається з підйому системи повернення у вихідне положення 8 за допомогою відповідного нахиляння догори. Кожна система повернення у вихідне положення 8 керується за допомогою горизонтально встановлених лінійних силових приводів 37. Такі силові приводи 37 встановлюються з обох сторін системи повернення у вихідне положення 8 і шарнірно з'єднані як з компонентом, що знаходиться на землі, так і з структурами, котрі можна схематизувати за допомогою стрижнів 36, у свою чергу шарнірно приєднаних до кінцевої частини компоненту, що знаходиться на землі, і до корпусу 38 системи повернення у вихідне положення 8 (як показано на Фіг. 18 та 19). За рахунок запуску силових приводів 37можна підняти та нахилити систему повернення у вихідне положення 8 з найближчого кінця до рейки 6 на таку саму висоту, на якій знаходиться згадана рейка 6, а з другого кінця на більшу висоту. Лінійні і силові приводи 37 уявляють собою, наприклад, гідравлічні циліндри, що приводяться до руху за допомогою гідравлічної системи, керованої інтелектуальною системою управління. В якості альтернативі гідравлічним циліндрам можна використовувати електромеханічні лінійні модулі. Обертально-поступальний рух здійснюється під час запуску та зупинки системи перетворення енергії вітру 1 для відповідного полегшення операцій зльоту та повернення у вихідне положення повітряних зміїв 2. Рух для розміщення ланки зміїв в укритті складається з відкриття системи повернення у вихідне положення 8 таким чином, щоб вона перетворилася на платформу, придатну для розміщення, щонайменше, однієї ланки 3 повітряних зміїв 2. Як вже було попередньо встановлено, системи повернення у вихідне положення 8, розташовані на землі, можуть бути, наприклад, контейнерами з закріпленою шарнірами кришкою і тому мати іншу структуру порівняно з рішенням щодо конструкції систем повернення у вихідне положення 8, розташованих на модулях 5 системи перетворення енергії вітру 1. По-перше, оскільки система повернення у вихідне положення 8 повинна відкриватися як платформа, найкраща форма, яку слід надати таким системам повернення у вихідне положення 8, вже не є тією, що нагадує циліндричну трубу. Окрім цього розташовані на землі системи повернення у вихідне положення не мають кінцевої частини 10, все ще здатної до орієнтації, а всередині у них немає роликового струмознімача системи повернення у вихідне положення та відштовхування. Кожна система повернення у вихідне положення 8 поздовжньо розділяється на секції для того, щоб її можна було зібрати, наприклад, з трьох частин 38 та 39. Як, зокрема, показано на Фіг. 20, дві частини 39 утворюють придатну для відкривання кришку системи повернення у вихідне положення 8, а третя частина 38 уявляє собою корпус контейнеру системи повернення у вихідне положення 8. Корпус 38 системи повернення у вихідне положення 8 розташований з орієнтованою догори западиною, а інші дві частини 39 приєднані шарніром до 47 цього корпусу 38 для утворення структури, котра здатна відкриватися та закриватися, допомагаючи системі повернення у вихідне положення 8 прийняти вигляд платформи. Відкривання контейнерів 8 у вигляді платформи здійснюється після запуску та зупинки системи перетворення енергії вітру 1, а саме у вказаному порядку для підйому та поверненню у вихідне положення повітряних зміїв 2. Після завершення операцій підйому та повернення у вихідне положення системи повернення у вихідне положення 8 знову закриваються. Подібно до обертально-поступального руху також виконується рух розміщення ланки зміїв в укритті, котрий здійснюється, наприклад, за допомогою силових приводів (не показані на Фігурах). Обидва силові приводи можуть бути гідравлічними циліндрами, що рухаються за допомогою гідравлічної системи (або лінійних електромеханічних модулів), керованої інтелектуальною системою управління. Посилаючись знову на версію системи перетворення енергії вітру 1, за архітектурою якої системи повернення у вихідне положення 8 розташовані на землі, можна прийняти два рішення. Перше рішення полягає у забезпеченні системи перетворення енергії вітру 1 з двома системами повернення у вихідне положення 8 для кожного модуля 5 (і, отже, для кожної ланки 3 повітряних зміїв 2); друге рішення полягає у використанні систем повернення у вихідне положення 8 у меншій кількості ніж кількість модулів 5 системи перетворення енергії вітру 1. Якщо системи перетворення енергії вітру 1 обладнана двома системами повернення у вихідне положення 8 для кожного модуля 5, то кожна ланка 3 повітряних зміїв 2 має два контейнери, наявні там, куди можуть повернутися повітряні змії: один розташований усередині замкнутої колії, утвореної рейкою 6, а другий - зовні такої колії. Якщо прийняти таке рішення, то ланку 3 повітряних зміїв 2 можна повернути у систему повернення у вихідне положення 8 або у іншу таку систему залежне від сили потоку вітру W. Якщо в якості альтернативи система перетворення енергії вітру 1 обладнана рядом систем повернення у вихідне положення 8 у кількості, меншій за кількість модулів 5, байдуже, де можна розміщувати системи повернення у вихідне положення 8 - всередині або зовні замкнутої колії, по якій проходить рейка 6, при цьому колена система повернення у вихідне положення 8 призначена для укриття більше ніж однієї ланки 3 повітряних зміїв 2. У такому випадку з цієї причини троси 4 для керування повітряними зміями 2 обладнані автоматичною системою з'єднання-роз'єднання (не показана на Фігурах), за допомогою якої троси 4 можна реверсивно з'єднувати з ланками 3 повітряних зміїв 2 та від'єднувати від них. Завдяки такій автоматичній системі ланка 3 повітряних зміїв 2 повертається тільки тоді, коли вона знаходиться поруч з системою повернення у вихідне положення 8 та умови щодо сили вітру є сприятливими. Коли повернення у вихідне положення завершується, троси 4, які поєднують модуль 5 до відповідної ланки 3 повітряних зміїв 2, від'єднуються від 96024 48 неї для уможливлення просування модулів 5 та повернення ланки 3 повітряних зміїв 2 відповідного модуля 5. У такий самий спосіб за допомогою тієї самої системи з'єднання-роз'єднання троси 4 знову з'єднуються з ланкою 3 повітряних зміїв 2 після запуску системи перетворення енергії вітру 1 та зльоту повітряних зміїв 2. Очевидно, що автоматична система з'єднання-роз'єднання тросів 4 зайва, якщо системи перетворення енергії вітру 1 обладнана двома системами повернення у вихідне положення 8 для кожного модуля 5, оскільки у такому випадку кожен роликовий струмознімач 11 системи перетворення енергії вітру 1 залишається приєднаним до відповідної ланки 3 повітряних зміїв 2 тоді, коли системи перетворення енергії вітру 1 не працює. Для уможливлення системи повернення у вихідне положення 8 приймати на зберігання багато ланок 3 повітряних зміїв 2 необхідно додатково забезпечити кожну систему повернення у вихідне положення 8 автоматичною системою зберігання (не показаною на Фігурах), за допомогою котрої можна послідовно повертати у вихідне положення або відривати від землі багато ланок 3 повітряних зміїв 2 та акуратно розміщувати ланки 3 повітряних зміїв 2 усередині системи повернення у вихідне положення 8. Така автоматична система зберігання складається, наприклад, з полиць, які поступально пересуваються на ременях, а їх рух керується інтелектуальними системами управління. Поступальний рух полиць залишається паралельним и проходить по замкнутій траєкторії для уможливлення швидкого виконання послідовності операції посадки, зберігання та зльоту ланок 3 повітряних зміїв 2. Аналогічно конструктивному рішенню, яке характеризується розташуванням системи повернення у вихідне положення 8 на модулях 5 системи перетворення енергії вітру 1, полегшення виконання зльоту та повернення у вихідне положення повітряних зміїв 2 можна досягнути використанням струменів стиснутого повітря, яке відповідним чином випускається для відштовхування і керування повітряними зміями 2 без потреби їх контакту. Пристрої для отримання цих штучних поривів вітру (не показані на Фігурах) можна розташувати уздовж систем повернення у вихідне положення 8, а маневри контролюються інтелектуальною системою управління для створення точного та швидкого пристрою керування. Такі самі пристрої для створення штучних поривів вітру можуть допомогти повернути у вихідне положення ланку 3 повітряних зміїв 2. За допомогою цих пристроїв фактично можна створити штучні потоки повітря, за рахунок котрих гарантується керованість повітряних зміїв 2 тоді, коли повітряні змії 2 знаходяться поруч з системами повернення у вихідне положення 8. У випадку застосування розташованої на землі системи повернення у вихідне положення 8 можна розташувати напрямну систему, що ховається (не показана на Фігурах), поруч з кінцевою частиною системи повернення у вихідне положення 8, через котру для приземлення на платформу проходить ланка 3 повітряних зміїв 2. Така напрямна система, що ховається, повинна полегшувати посадку 49 ланки 3 повітряних зміїв 2 на систему повернення у вихідне положення 8 та складатися, наприклад, з пари стрижнів, розташованих по сторонах системи повернення у вихідне положення 8 і перед нею. Стрижні підіймаються майже у вертикальне положення в ті моменти, які передують етапу посадки, для стримування можливого ослаблення аеродинамічної стійкості ланки 3 повітряних зміїв 2 та скерування їх у систему повернення у вихідне положення 8, відкриту у вигляді платформи. Така напрямна система, що ховається, також знаходиться під керуванням інтелектуальної системи управління. У підсумку за рахунок розташування системи повернення у вихідне положення 8 повітряних зміїв 2 на землі вважається, що системи перетворення енергії вітру 1 обладнана двома системами повернення у вихідне положення 8 для кожної ланки 3 повітряних зміїв 2, а операція повернення у вихідне положення повітряних зміїв 2 здійснюється наступним чином: - Троси 4, які з'єднують ланку 3 повітряних зміїв 2 зі струмознімачами 11 системи перетворення енергії вітру 1, перемотуються для підведення ланок 3 повітряних зміїв 2 до місця поруч зі струмознімачем 11; - Напрямні системи, що ховаються, приводяться у дію, і за рахунок обертатьнопоступального руху і руху занесення на зберігання ланки зміїв системи повернення у вихідне положення 8 підіймаються, нахиляються догори і відкриваються у вигляді платформи; - Поштовх модулів 5 системи перетворення енергії вітру 1 припиняється і за допомогою пристроїв створення штучних поривів вітру ланки 3 повітряних зміїв 2 одночасно опускаються на відповідні платформи, розташовані усередині або зовні замкнутої колії проходження рейки 6; та - Системи повернення у вихідне положення 8 знову закриваються та обертаються і рухаються поступально для розташування поруч з земною поверхнею. Якщо кожна система повернення у вихідне положення 8 призначена для зберігання багатьох ланок 3 повітряних зміїв 2, операція повернення у вихідне положення не здійснюється одночасно для усіх ланок 3 повітряних зміїв 2. Поштовхи системи використання енергії вітру припиняються для уможливлення посадки ряду ланок 3 повітряних зміїв 2, число яких дорівнюється кількості систем повернення у вихідне положення 8. Тепер за допомогою системи автоматичного з'єднанняроз'єднання троси 4 від'єднуються від ланок 3 повітряних зміїв 2, що приземлилися, а системи автоматичного зберігання повертають у вихідне положення ланки 3 повітряних зміїв 2, звільнюючи платформи без бортів для посадки інших повітряних зміїв 2. Система перетворення енергії вітру запускається знову, а модулі 5, від'єднанні від ланок 3 повітряних зміїв 2, починають рухатись по рейці 6 для повернення у вихідне положення ланок 3 повітряних зміїв 2 наступних модулів 5. Після того, як усі ланки 3 повітряних зміїв 2 вернулися на свої місця зберігання у відповідних контейнерах, системи повернення у вихідне положення 8 знову 96024 50 закриваються і опускаються нижче для розташування біля земної поверхні. Зліт повітряних зміїв здійснюється шляхом тієї самої послідовності операцій, але у зворотному порядку. Посилаючись знову на випадок, коли кожна система повернення у вихідне положення 8 призначається для зберігання окремої ланки 3 повітряних зміїв 2, системи повернення у вихідне положення 8 підіймаються, нахиляються вгору та відкриваються у вигляді платформи. Після цього відбувається запуск пристроїв для утворення штучних поривів вітру для виштовхування ланок 3 повітряних зміїв 2, а модулі 5 системи перетворення енергії вітру 1 просуваються по рейці 6 завдяки двигунам 20, які контролюються інтелектуальною системою управління і створюють на рівні ланок 3 повітряних зміїв 2 легкий вітерець, який уможливлює підйом повітряних зміїв 2. Якщо в якості альтернативи кожна система повернення у вихідне положення 8 призначена для зберігання багатьох ланок 3 повітряних зміїв 2 так само, як і на етапі посадки, етап зльоту також здійснюється одночасно для усіх ланок 3 повітряних зміїв 2. У цьому випадку після підйому, нахиляння вгору та розкриття у вигляді платформи систем повернення у вихідне положення за допомогою системи з'єднання-роз'єднання троси 4 з'єднуються з ланками 3 повітряних зміїв 2, які повинні злетіти. Після зльоту повітряних зміїв 2 модулі 5, приєднані до ланок 3 повітряних зміїв 2, просуваються по рейці 6 для уможливлення приєднання ланок 3 повітряних зміїв 2 за допомогою наступних модулів 5. Після того, як усі ланки 3 повітряних зміїв 2 зробили свій зліт, системи повернення у вихідне положення 8 знову закриваються і опускаються нижче для розташування біля земної поверхні. Система перетворення енергії вітру 1 відповідно до цього винаходу додатково складається, щонайменше, з однієї системи передачі. Системи передачі є компонентами модулів 5 системи перетворення енергії вітру 1, котрі керують рухом тросів 4 між повітряними зміями 2 та системами 22 для намотування та розмотування тросів 4. Системи передачі складаються з шківів, скомпонованих на модулях 5 системи перетворення енергії вітру 1. Кожен модуль 5 системи перетворення енергії вітру 1 обладнаний системою передачі, в якій встановлені переважно два ряди шківів, по одному для кожного з двох тросів 4, за допомогою котрих здійснюється керування повітряними зміями 2. У випадку використання окремого тросу 4 в якості з'єднувального елементу між модулем 5системи перетворення енергії вітру і повітряними зміями 2 кожен модуль 5 буде обладнаний окремим рядом шківів. Шківи, наявні у кожній системі передачі, можна поділити на чотири категорії: - Шківи 35, скомпоновані на роликовому струмознімачу системи повернення у вихідне положення та виштовхування у повітря повітряних зміїв 2; - Фіксовані шківи 33, безпосередньо приєднані до модуля 5 системи перетворення енергії вітру; 51 - Шківи, які є частиною систем для поглинання піків сили натягування тросів 4, зазначених нижче за текстом; - Шківи, які є частиною системи для компенсації тертя тросів 4, зазначеної нижче за текстом; - Шківи 34, скомпоновані на слайдерах приводних модулів 26 строп 4 (одна для кожного слайдера 27). У випадку використання двох роликових струмознімачів 11 для кожного модуля 5 системи перетворення енергії вітру 1 за винятком тих шківів, котрими обладнана система повернення та виштовхування повітряних зміїв 2Є, інші шківи 33 розташовуються на роликовому струмознімачу 11 модуля 5, який знаходиться на нижчий висоті. Повна кількість шківів, які складають систему передачі, очевидно залежить від розмірів роликових струмознімачів 11. Система перетворення енергії вітру 1 відповідно до цього винаходу складається додатково, щонайменше, з однієї системи для поглинання піків сили натягування тросів 4 (не показана). Системи для поглинання піків сили натягування тросів 4 є компонентами системи перетворення енергії вітру 1, які компенсують раптові зміни навантаження малого об'єкту, які неспроможні амортизувати троси 4. Системи для поглинання піків сили натягування тросів розташовуються між системами 22 для намотування та розмотування тросів 4 та системою повернення у вихідне положення 8. Система перетворення енергії вітру 1 відповідно до цього винаходу може бути обладнана, наприклад, системою поглинання піків сили натягування тросів, інформація про котру розкривається у згаданій раніше італійський заявці на винахід № ТО2006А000491, на який можна зробити посилання для отримання більш детального пояснення. У комплексі кожна система поглинання піків сили натягування тросів складається з шківу, приєднаного до послаблюючої противаги, яка підіймається з рівня землі та здатна рухатися поступально по вертикалі, при цьому ця система обмежена у пересуванні відповідним напрямним пристроєм. Трос 4 намотується на шків, який керує рухом ланки 3 повітряних зміїв 2 так, що саме натягування тросу 4 утримує противагу у підвішеному стані. Кожен модуль 5 системи перетворення енергії вітру 1 за цим винаходом належить обладнати, щонайменше, однією системою для поглинання піків сили кожного тягового тросу 4, за допомогою котрого здійснюється керування повітряними зміями. Система перетворення енергії вітру 1 відповідно до цього винаходу додатково складається, щонайменше, з однієї системи гальмування тросів 4 (не показана). Системи гальмування тросів 4 є компонентами системи перетворення енергії вітру 1, що блокують рух тросів 4, коли відсутнє навантаження, та сприяють компенсації раптових змін навантаження малого об'єкту, котрі нездатні амортизувати троси 4. Системи гальмування розташовуються між системами 22 для намотування та розмотування тро 96024 52 сів 4 и системою повернення у вихідне положення 8. Системи гальмування, які відповідно до цього винаходу входять до складу системи перетворення енергії вітру 1, включають, наприклад, шків, з'єднаний з лінійним напрямним пристроєм. Паралельно напрямку поступального руху, визначеного лінійним напрямним пристроєм, встановлюється послаблююча пружина, котра напружена з одного кінця шківом, а з другого - роликовим струмознімачем 11. Трос 4 намотується на шків і керує рухом ланки 3 повітряних зміїв 2 так, що внаслідок натягування тросу 4 пружина стискається. Коли трапляється раптове збільшення навантаження на трос 4, то воно частково послаблюється стисканням пружини. Однак головна функція, яку виконує така система гальмування, полягає у блокуванні тросу 4 у випадку відсутності навантаження на цей трос. Фактично пружину можна попередньо натягнути так, щоб у випадку відсутності навантаження на трос 4, цей трос сам стискувався пружиною у місці між натягнутою системою гальмування та другим шківом. Кожен модуль 5 системи використання енергії вітру 1 цього винаходу може бути обладнаний, щонайменше, однією системою гальмування для кожного тягового тросу 4, за допомогою котрого здійснюється керування рухом повітряних зміїв 2. Система перетворення енергії вітру 1 відповідно до цього винаходу додатково включає, щонайменше, одну систему 22 намотування та розмотування тросів 4 (не показана). Системи 22 для намотування та розмотування тросів 4 є компонентами модулю 5 системи перетворення енергії вітру 1, розташованими між системами гальмування (або системи поглинання піків сили) та системами зберігання 23 тросів 4, згаданими нижче за текстом. Система перетворення енергії вітру 1 відповідно до цього винаходу може бути обладнана, наприклад, тими самими системами 22 для намотування та розмотування тросів 4, інформація про котрі розкривається у згаданій раніше італійський заявці на винахід за № TO2006A000491, на яку можна зробити посилання для отримання більш детального пояснення. У комплексі кожен модуль 5 системи перетворення енергії вітру 1 обладнаний системою намотування та розмотування 22, яка складається з двох пар чотирьох лебідок 24, на котрі намотана пара тросів 4 відповідної ланки 3 повітряних зміїв 2. Кожен трос 4, котрий виходить з системи гальмування, намотується навколо чотирьох відповідних лебідок 24 системи намотування та розмотування 22, після чого він прямує до системи зберігання 23. Системи намотування та розмотування 22 є такими, що витримують усю силу натягування тросів 4. Чотири лебідки 24, навколо котрих намотується кожен трос, розташовуються у два рівні (по дві на верхньому та нижньому рівнях) і мають обертальні осі, паралельні один одному. Кожен трос 4 у середньому намотується на колену з цих лебідок 24 приблизно на три чверті кола. Оскільки існує чотири лебідки 24 для кожного тросу 4, то повне 53 намотування тросу 4 на лебідки 24 цієї системи еквівалентне трьом повним намотуванням тросу 4 на окрему лебідку. Чотири лебідки 24, на які намотується той самий трос 4, з'єднані, наприклад, з двигуном 28 за допомогою зубчатих передач (ймовірно з використанням проміжного редуктора), запуск котрого регулюється інтелектуальною системою управління. Саме за допомогою цих лебідок 24 здійснюється керування рухом повітряних зміїв 2. Альтернативне рішення (не показане на Фігурах) полягає у застосуванні двигуна для кожної лебідки 24. Для спрощення у цій роботі нижче за текстом буде зроблене посилання на випадок, коли системи 22 для намотування та розмотування тросів 4 будуть обладнані окремим двигуном 28 для кожних чотирьох лебідок 24, на котрі намотується окремий трос 4. Тертя між кожною лебідкою 24 та тросом 4 може бути збільшене наданням відповідної форми поверхні лебідок 24 для укладення там тросу 4, що збільшує площу контактної поверхні між тросом 4 та лебідкою 24. Завжди звертайте увагу на окремий трос 4, можна провести диференціацію між шершавістю поверхні чотирьох лебідок 24 для поступового збільшення тертя між тросом 4, коли він прямує до систем зберігання 23, та лебідкою 24. У випадку використання окремого тросу 4 в якості з'єднувального елементу між модулем 5 системи перетворення енергії вітру 1 та повітряними зміями 2 система 22 намотування та розмотування тросів 4 буде обладнана тільки чотирма лебідками 24. Це зменшує громіздкість системи намотування та розмотування 22 тросів 4 та інерцію модуля 5 системи перетворення енергії вітру 1, що приводить до меншого споживання електроенергії на запуск системи. Належить пам'ятати, що відрізняння системи керування рухом 22 від системи зберігання 23 тросів 4 стає необхідним в результаті значної довжини секцій тросу 4, приєднаного до повітряних зміїв 2. Якщо фактично кожному тросу 4 виділена окрема лебідка (котра у такій спосіб працює як система керування рухом, так і система зберігання тросу), трос 4 повністю обернеться навколо барабану лебідки, формуючи при цьому багато шарів і одночасно з цим витримуючи великі навантаження. Такої ситуації належить уникати, оскільки тертя, яке повинно виникнути внаслідок взаємного ковзання різних звивин тросу 4, зношуватиме трос 4 до такого ступеню, що останній втрачатиме свої механічні якості. В якості альтернативи системам намотування та розмотування 22 тросів 4, які відносяться до типу "чотири лебідки", можна використовувати, наприклад, окрему лебідку для кожного тросу 4. У такому випадку трос 4 обмотується навкруги такої лебідки, виконуючи тільки обмежену кількість повних обертів (таку кількість, яка розрахована на формування одного шару обертів тросу), після чого він спрямовується до системи зберігання 23. Друга альтернатива полягає у використанні пристроїв, обладнаних парою зрізаних усередині напрямних пристроїв, у котрі вставляється трос 4. Обидва альтернативних рішення, які є застосов 96024 54 ними до вищезазначеної системи 22 намотування та розмотування тросів 4, так або інакше викладені в італійській заявці на патент за № ТО2006А000491. Система перетворення енергії вітру 1 відповідно до цього винаходу додатково містить, щонайменше, одну систему зберігання 23 тросів 4 (не показана). Системи зберігання 23 тросів 4 є компонентами модуля 5 системи використання енергії вітру 1, котрі призначені для зберігання тросів 4 повітряних зміїв 2. Система перетворення енергії вітру 1 відповідно до цього винаходу обладнана, наприклад, тими самими системами зберігання 23 тросів 4, інформація про котрі розкривається у згаданій раніше італійський заявці на патент за № ТО2006А000491, на який можна зробити посилання для отримання більш детального пояснення. У комплексі кожен модуль 5 системи перетворення енергії вітру 1 обладнаний системою зберігання 23 тросів 4, яка складається з пари лебідок 25, навколо котрих намотана пара тросів 4 відповідної ланки 3 повітряних зміїв 2. Ці лебідки 25 за допомогою пари редукторів приєднані до пари двигунів 29, чий запуск регулюється інтелектуальною системою управління. Подібно до того, про що повідомлялося раніше, у випадку використання окремого тросу 4 в якості з'єднувального елементу модуля 5 системи перетворення енергії вітру 1 та відповідної ланки 3 повітряних зміїв 2 система зберігання 23 тросів 4 обладнана окремою лебідкою 25, з'єднаною через редуктор з окремим двигуном 29. Це зменшує громіздкість системи зберігання 23 тросів 4 та інерцію модуля 5 системи перетворення енергії вітру 1, що призводить до меншого споживання електроенергії на запуск системи. Системи зберігання 23 також не призначені для керування рухом повітряних зміїв 2. У такий спосіб натягування тросів 4, обмотаних навколо лебідок 25 системи зберігання 23, набагато нижче ніж натягування, котре можна помітити у секціях тросу 4, намотаного на лебідки 24 системи намотування та розмотування 22. Отже там, де навантаження на троси 4 вище, кількість звивин тросу на лебідках 24 є таким, що троси 4 ніколи не укладатимуться у два або декілька шарів. І навпаки, на лебідках 25 системи зберігання 23 троси 4 намотуються у багато шарів, але сила натягування залишається мінімальною. Діаметр лебідок 25, які складають систему зберігання 23, є більшим ніж діаметр лебідок 24 системи намотування та розмотування 22 для мінімізації будь-яким способом кількості шарів звивин тросу. Отже інтелектуальна система управління також призначена і для синхронізації обертання лебідок 24 і 25 системи намотування та розмотування 22 тросів 4 та системи зберігання 23, навколо котрих намотується той самий трос 4. Це - основне правило для управління величиною навантаження на ту секцію тросу 4, яка знаходиться між двома системами 22 та 23, насамперед під час виконання етапів запуску та зупинки системи перетворення енергії вітру 1. 55 Оскільки лебідки 25 системи зберігання 23 тросів 4 укладають багатошарові звивини, поруч з кожною лебідкою 25 необхідно розмістити модуль керування рухом 26, який примушує трос 4 акуратно намотуватися на лебідку 25 та попереджає взаємне ковзання тросу 4 та бокових частин лебідки 25, а також ковзання між самими звивинами. Модулі керуванням рухом 26 тросів 4 є компонентами модулів 5 системи перетворення енергії вітру 1, які примушують троси 4 акуратно намотуватися на лебідки 25 системи зберігання 23 та попереджають взаємне ковзання тросів 4 та бокових частин лебідок 25, а також ковзання між самими тросами 4. Система перетворення енергії вітру 1 відповідно до цього винаходу обладнана, наприклад, тими самими модулями 26 для керування рухом тросів 4, інформація про котрі розкривається у згаданій раніше італійський заявці на патент за № ТО2006А000491, на який можна зробити посилання для отримання більш детального пояснення. У комплексі ці модулі керування рухом 26 складаються з повзуна 27, з'єднаного з рейкою, встановленою паралельно осі обертання лебідки 25, яка належить відповідній системі зберігання 23 тросів 4. Повзун 27 здатний поступально рухатись у двох напрямках, а шків 34 скомпонований відносно нього. Зокрема такий шків 27 рухається за кожним кроком зубчатої передачі лебідки 25. В модулях керування рухом 26 тросів 4 поступальний рух повзуна 27 здійснюється за допомогою електродвигуна 30, чия робота регулюється інтелектуальною системою управління, котра керує рухом повітряних зміїв 2. До складу системи перетворення енергії вітру 1 входить модуль керування рухом 26 тросів 4 для кожної лебідки 25 системи зберігання 23. В якості альтернативи використанню модулів керування рухом 26 тросів 4 можна, наприклад, розмістити кожну лебідку 25 системи зберігання 23 тросів 4 на роликовому струмознімачу, який поступально рухається по напрямному пристосуванню, встановленому паралельно осі обертання відповідної лебідки 25. Пересування роликового струмознімачу здійснюється за допомогою електродвигуна, чия робота регулюється інтелектуальною системою управління. Також інформація про таке рішення розкривається італійський заявці на патент за № ТО2006А000491. У випадку прийняття цього рішення модуль керування рухом 26 тросів 4 більше не потрібен, оскільки сама лебідка 25 поступально рухатиметься для забезпечення акуратного намотування тросу 4. Модулі 5 системи перетворення енергії вітру 1 обладнані електродвигунами, які також працюють як генератори, та генераторами 20 та/або 21, які також працюють як двигуни. До електродвигунів відносяться ті двигуни, за допомогою котрих здійснюється запуски лебідок 24 і 25 та модулів керування рухом 26 тросів 4. Зокрема для кожного тросу 4 система перетворення енергії вітру 1 обладнана трьома електродвигунами: 96024 56 - Двигун 28 є відповідальним за обертання лебідок 24 системи намотування та розмотування 22 тросу 4; - Двигун 29 є відповідальним за обертання лебідок 25 системи зберігання 23 тросу 4; - Двигун 30 є відповідальним за поступальний рух повзуна 27 модуля керування рухом 26 троса 4 (або роликового струмознімача, на котрому компонується лебідка 25 системи зберігання 23 тросів 4). Для пересування кінцевої частини 10 системи повернення у вихідне положення 8 кожен модуль 5 системи перетворення енергії вітру 1 додатково обладнаний гідравлічною системою, котра запускає гідравлічні циліндри 32, або лінійними електромеханічними модулями. Кожен з двигунів 28, 29 та 30 може стикуватися з відповідною лебідкою 24 та 25 або з модулем керуванням рухом 26 тросів 4 через редуктор, наприклад, епіциклоїдного типу. Оскільки ці двигуни 28 та 29 також здатні працювати як генератори, можна виробляти електроенергію за допомогою двигунів 28, приєднаних до лебідок 24 системи намотування та розмотування 22 тросів 4, використовуючи силу тяги, яка подається від повітряних зміїв 2 на згадані лебідки 24. Електродвигуни контролюються інтелектуальною системою управління, а ті з них, котрі відповідають за натягування того самого тросу 4 повітряних зміїв 2, повинні працювати синхронно. Для виробництва електроенергії за рахунок використання сили тяги модулів 5 системи перетворення енергії вітру 1, отриманої за допомогою повітряних зміїв 2, рішення, котрі можна прийняти до уваги, є численними, але вони також залежать від режиму поступального руху модулів 5 вздовж рейок 6. Виробництво електроенергії можна здійснювати за допомогою генераторів/двигунів 20, які запускаються напряму в результаті обертання коліс 16, за допомогою котрих модулі 5 системи перетворення енергії вітру 1 рухаються вздовж рейки класичного типу 6 (або запускаються в результаті обертання коліс 16 роликових струмознімачів 11, використаних для перетворення енергії). Як повідомлялося раніше, виробництво електроенергії можна також здійснювати за допомогою генераторів 21, які запускаються в результаті обертання зубчатих коліс 18, котрі котяться, щонайменше, по одній зубчатій рейці 15, встановленій на рейці класичного типу 6, вздовж якої пересуваються модулі 5 системи перетворення енергії вітру 1. Виробництво електроенергії можна зрештою здійснювати за допомогою реверсивних магнітних лінійних двигунів, тому що вони працюють як генератори. У залізничному транспорті, де використовується магнітна левітація, магнітне відштовхування та притягання використовуються не тільки для левітації ешелону, але і як засіб пересування. Зокрема для пересування та гальмування ешелону у транспортному засобі, що рухається за принципом магнітної левітації, використовується синхронний лінійний двигун, який працює як електричний роторний двигун, статор котрого є відкритим та роз 57 ташовується вздовж рейки. Ротор та статор утворюють не момент скручування, а лінійне зусилля. Таке зусилля виробляється набором магнітів або соленоїдів, які генерують магнітне поле ковзання, котре взаємодіє з електромагнітами, розташованими на рейці. Магнітне поле, створене ешелоном, індукує в розташованих на рейці електромагнітах електричний струм, котрий спрацьовує у вигляді відштовхування поля, яке індукує струм. Це призводить до генерування зусилля, яке штовхає ешелон у напрямку, протилежному напрямку ковзання за магнітним полем. Такий самий принцип може бути задіяний для перетворення механічної енергії за допомогою магнітного поля у електричну енергію, при цьому механічна енергія отримана в результаті сили тяги повітряних зміїв 2, прикладеної до модулів 5 системи перетворення енергії вітру 1. Зокрема, модулі 5 системи перетворення енергії вітру 1 можуть бути обладнані постійними магнітами (і отже не потребувати живлення), яких, ймовірно, будуть підживляти соленоїди надпровідного типу (котрі потребують відносно мало електроенергії), і, ймовірно, металевими обмотками, котрі будуть розмішуватися на рейці 6 та працювати як електромагніти. Такі обмотки відповідно розташовуються таким чином, щоб постійні магніти під час поступального руху модулів 5 вздовж рейки 6 індукували струм у цих електромагнітах. Такі індуковані струми частково генерують магнітне поле, котре протидіє магнітному полю індукції, створюючи левітацію модулів 5, і частково є результатом перетворення механічної енергії у електричну. Зокрема модульна композиція постійних магнітів і відповідний магнітний ланцюг на поверхні рейки 6 та на модулях 5 призвичаюються до безперервної зміни індукованого потоку під час відносного поступального руху модулів 5 стосовно рейки 6. Ці зміни потоку в магнітних ланцюгах корисно поєднуються з магнітним потоком обмоток для збирання електроенергії. Ці обмотки можуть з'єднуватися з силовими електросхемами, які змінюють спосіб поглинання магнітного потоку у керований та швидкий спосіб. Таким чином система стає силовим приводом, який може працювати за рахунок модуляції магнітного поля у рушійних силах перехідних процесів. Ця характеристика дозволяє реалізувати віртуальний гаситель коливань, котрий може поглинати можливі надлишки енергії флуктуації або вібрації повзунів, обладнаних постійними магнітами, у напрямку, перпендикулярному до площини повітряного зазору. Постійні магніти, котрими належить обладнати модулі 5, можуть бути виготовлені, наприклад, з сплаву неодиму, заліза та бору. Такі магніти є найкращим варіантом для отримання достатньо широкого повітряного зазору та інтенсивних магнітних потоків. Максимальна потужність повзунів, обладнаних постійними магнітами, є функцією лицевої площі і має перевагу внаслідок магнітного відштовхування, яке змінюється пропорційно квадрату відстані. У підсумку використання магнітної левітації за допомогою постійних магнітів дозволяє об'єднати три функціональності у єдиній підсистемі: підвішу 96024 58 вання модулів 5 з низьким тертям (отже ковзання модулів 5 є надзвичайно ефективним і може здійснюватись без зносу їх складових елементів), генерування електроенергії (яке здійснюється безпосередньо на рейці 6) та поглинання енергії можливих флуктуацій та вібрацій повзунів, обладнаних постійними магнітами, у випадку впливу поштовхів модулів 5 (і отже розтягнутої гнучкої структури 12). Для запобігання ризикам створення тяги повзунами, обладнаними постійними магнітами, типовий зразок допоміжного з'єднання має два ступені свободи у вигляді вісі шарніру і штовхає площу центру інерції повзуна. У такій спосіб передаються тільки навантаження уздовж напрямку ковзання, а саме ті з них, що діють у поперечному напрямку, в площині або перпендикулярно площині повітряного зазору. Що стосується перетворення енергії, то існує чотири конфігурації, які можна прийняти для системи перетворення енергії вітру 1 за цим винаходом: - Модулі 5 системи перетворення енергії вітру 1 пересуваються по головних рейках класичного типу 6 за допомогою коліс 16 та 17, чиє обертання напряму запускає генератори 20 для виробництва току. Колеса 16, приєднані до генераторів 20, є такими, на котрі опирається вага модуля 5. Така конфігурація може бути прийнята до застосування тільки тоді, коли тертя катання таких коліс 16 достатнє для запуску генераторів 20; - Модулі 5 системи перетворення енергії вітру 1 пересуваються по головних рейках класичного типу 6 за допомогою коліс 16 та 17, але генерування струму здійснюється здебільшого в результаті запуску генераторів 21, приєднаних до зубчатих коліс 18, які котяться, щонайменше, по одній зубчатій рейці 15. Навіть тоді, коли у такій конфігурації гладкі колеса 16, головним чином, виконують допоміжну функцію, вони так або інакше з'єднані з двигунами 11, котрі, як пояснюється нижче за текстом, запускаються після старту системи перетворення енергії вітру 1 для початку функціонування модулів 5. Такі двигуни 11 можна застосовувати в якості генераторів, коли працює система перетворення енергії вітру 1, в якій застосовується тертя катання між гладкими колесами 16 та рейкою 6 класичного типу; - Модулі 5 системи перетворення енергії вітру 1 пересуваються по рейках 6, які являють собою комбінацію між рейкою класичного типу та магнітною рейкою, за допомогою коліс 16 та 17, які виконують виключно допоміжну функцію. Генерування струму здійснюється за допомогою реверсивних магнітних лінійних двигунів, тому що вони працюють як генератори; - Модулі 5 системи перетворення енергії вітру 1 пересуваються по рейках 6, які являють собою комбінацію між рейкою класичного типу та магнітною рейкою, за допомогою магнітної левітації. Модулі 5 також обладнані колесами 16, які забезпечують збереження повітряного зазору. Генерування струму здійснюється за допомогою реверсивних магнітних лінійних двигунів, тому що вони працюють як генератори. 59 З чотирьох вищезазначених конфігурацій ті з них, що передбачають використання реверсивних магнітних лінійних двигунів, є такими конфігураціями, котрі забезпечують отримання електроенергії у більшому обсязі. Пристрої, які займаються генеруванням електроенергії та є роторними генераторами/двигунами 20 або реверсивними лінійними двигунами, використовуються після запуску системи перетворення енергії вітру 1 як двигуни для пересування модулів 5 і створення легкого вітерцю у кінцевій частині системи повернення у вихідне положення 8 з метою сприяння підійманню повітряних зміїв 2. Якщо модулі 5 системи перетворення енергії вітру 1 не приєднані один до одного за допомогою витягнутої гнучкої структури 12, то іншою обставиною, коли генератори 20 застосовуються як двигуни, є відсутність тяги з боку повітряних зміїв 2 під час роботи системи використання енергії вітру 1. У такому випадку модуль 5 системи перетворення енергії вітру 1 спочатку просувається за інерцією. Якщо інтелектуальна система управління не здатна за короткий час відновити силу тяги, то замість двигунів запускаються генератори 20, і модуль 5 починає рухатися без вимушеного уповільнення ходу наступного за ним модуля 5. Інтелектуальна система управління є тією системою, за допомогою котрої здійснюється автоматичне керування рухом повітряних зміїв 2. Головна задача цього компоненту полягає у керуванні роботою двигунів 28 та 29, приєднаних до лебідок 24 і 25 системи намотування та розмотування 22 і системи зберігання 23 тросів 4 та у контролі роботи системи, пристосованої для керування рухом адаптованої під орієнтацію у просторі кінцевої частини 10 системи повернення у вихідне положення 8 повітряних зміїв 2. Очевидно, що кожній ланці 3 повітряних зміїв 2 надається рух незалежно від інших, за рахунок чого можна уникнути появи можливих порушень при виконанні польотів. Бажано, щоб інтелектуальна система управління системи перетворення енергії вітру 1 відповідно до цього винаходу могла бути подібною до тій, інформація про котру була розкрита у попередньо зазначеній італійській заявці на винахід за № ТО2006А000491, на який можна зробити посилання для більш детального пояснення. У комплексі головні функції, які виконуються інтелектуальною системою управління, є наступними: - Автоматичне керування польотом повітряних зміїв 2; - Автоматичне калібрування датчиків як обладнання повітряних зміїв 2; - Запобігання зіткнень між повітряними зміями 2 та іншими літаючими об'єктами; - Запуск модуля керування рухом 26 тросів 4, пересування яких визначається двигунами для поступального руху лебідок 25 системи зберігання 23; - Запуск двигунів; - Компенсація змін навантаження на троси 4. Система живлення складається з усіх необхідних компонентів для акумулювання та постачання електроенергії. Зокрема система перетворення 96024 60 енергії вітру 1 обладнана джерелами живлення, трансформаторами та акумуляторами, за допомогою котрих зберігається генерована електроенергія, струм постачається до двигунів під час фази запуску модулів 5 системи перетворення енергії вітру 1 та для повернення повітряних зміїв 2 у вихідне положення, і здійснюється живлення усіх електронних компонентів та надання електроенергії зовнішнім користувачам навіть тоді, коли робота усіх електронних компонентів системи перетворення енергії вітру 1 контролюється інтелектуальною системою управління. У цьому винаході є додаткове посилання на спосіб виробництва електроенергії за допомогою системи перетворення енергії вітру 1 так, як було описано раніше. У загальному випадку спосіб роботи цього винаходу, який охоплює перетворення енергії вітру у електроенергію, котре відбувається за допомогою системи перетворення енергії вітру 1 відповідно до цього винаходу, складається з чотирьох етапів, які циклічно повторюються під час роботи системи перетворення енергії вітру. Посилаючись на модуль 5 системи перетворення енергії вітру 1 і гіпотетично вважаючи, що напрямок, уздовж котрого дує вітер W, є постійним, а рейки 6 та 7 описують коло, то упродовж перших трьох етапів способу відповідно до цього винаходу поступальний рух модуля 5 здійснюється завдяки енергії, відібраної від потоку вітру W за допомогою ланки 3 повітряних зміїв 2, приєднаних до такого модуля 5. Отже інтелектуальна система управління керує рухом ланки 3 повітряних зміїв 2 таким чином, щоб можливість відбору енергії вітру була максимальною, сумісною с задовольнянням потреби у збереженні позиції тросів 4 настільки спрямованій по дотичній до рейки 6 під час виконання усього етапу, наскільки це можливо. Фактично чим більш троси 4 спрямовані по дотичній до рейки 6, тим вищою є корисна складова сили тяги, яка впливає на керування модулем 5. Той факт, що троси 4 спрямовані по дотичній до рейки 6, означає керування рухом ланки 3 повітряних зміїв 2 з боку системи управління здебільшого з метою використання підйомної сили, а саме: тієї її силової складової, яка перпендикулярна швидкості вітру. Таким чином повітряні змії 2 рухаються, охоплюючи поверхню фронту дії вітру. Після цього вітер рухає повітряні змії 2, натягуючи троси 4, приєднані до модулів 5 системи перетворення енергії вітру 1: ця сила тяги визначає керування модулями 5 та виробництво електроенергії за допомогою генераторів 20 та/або 21 або реверсивних магнітних лінійних двигунів. Четвертий та останній етап способу відповідно до цього винаходу альтернативно відбувається на ділянці за вітром. Інтелектуальна система управління керує рухом ланки З повітряних зміїв 2 для швидкого перетину такої ділянки без створення будь-якого ефекту гальмування для модуля 5 системи перетворення енергії вітру 1. Зокрема не тільки інтелектуальна система управління керує рухом ланки 3 повітряних зміїв 2 для відпрацювання поступального руху модуля 5, але і сила тяги, вироблена повітряними зміями 2, все ще діє
ДивитисяДодаткова інформація
Назва патенту англійськоюWind system for converting energy by translating on a rail modules dragged by kites and process for producing electric energy through such system
Автори англійськоюMassimo, Ippolito, Taddei, Franco
Назва патенту російськоюСистема преобразования энергии ветра с помощью поступательного движения рельсовых модулей, которые приводятся в движение воздушными змеями, и способ выработки электроэнергии с помощью такой системы
Автори російськоюМассимо Ипполито, Таддеи Франко
МПК / Мітки
МПК: F03D 11/04, F03D 5/04
Мітки: такої, рейкових, виробництва, перетворення, вітру, система, електроенергії, модулів, системі, поступального, спосіб, допомогою, приводяться, зміями, повітряними, енергії, руху, рух
Код посилання
<a href="https://ua.patents.su/44-96024-sistema-peretvorennya-energi-vitru-za-dopomogoyu-postupalnogo-rukhu-rejjkovikh-moduliv-shho-privodyatsya-v-rukh-povitryanimi-zmiyami-ta-sposib-virobnictva-elektroenergi-za-dopomogo.html" target="_blank" rel="follow" title="База патентів України">Система перетворення енергії вітру за допомогою поступального руху рейкових модулів, що приводяться в рух повітряними зміями, та спосіб виробництва електроенергії за допомогою такої системи</a>
Пристрій для перетворення енергії вітру у корисну механічну енергію
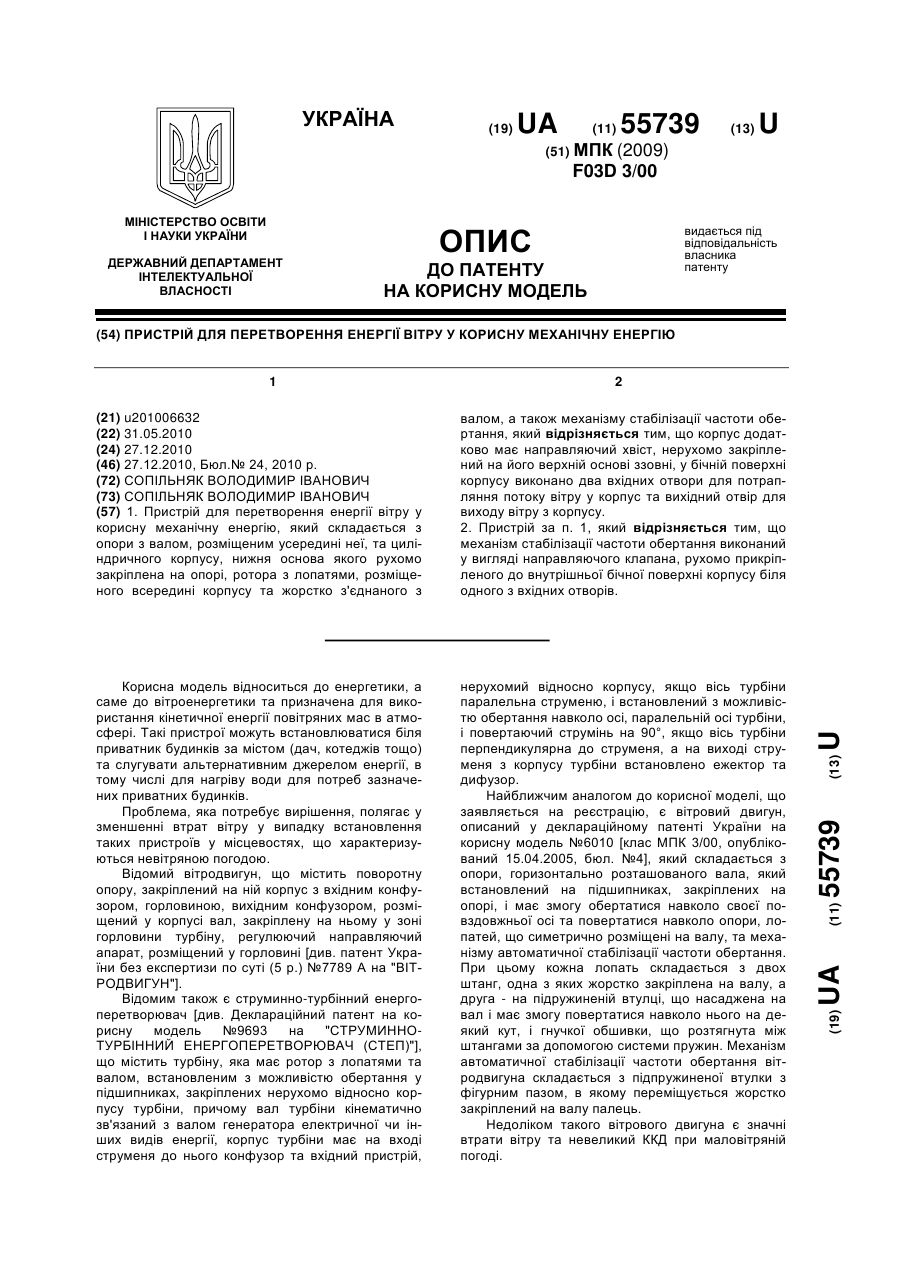
Номер патенту: 55739
Опубліковано: 27.12.2010
Автор: Сопільняк Володимир Іванович
МПК: F03D 3/00
Мітки: енергію, вітру, механічну, перетворення, енергії, пристрій, корисну
Формула / Реферат:
1. Пристрій для перетворення енергії вітру у корисну механічну енергію, який складається з опори з валом, розміщеним усередині неї, та циліндричного корпусу, нижня основа якого рухомо закріплена на опорі, ротора з лопатями, розміщеного всередині корпусу та жорстко з'єднаного з валом, а також механізму стабілізації частоти обертання, який відрізняється тим, що корпус додатковомає направляючий хвіст, нерухомо закріплений на його верхній основі...
Спосіб перетворення енергії вітру на водній поверхні в електричну енергію

Номер патенту: 59832
Опубліковано: 25.05.2011
Автори: Казанцев Тарас Анатолійович, Старостенко Ярослав Станіславович, Ткаченко Віктор Максимович, Кобко Олександр Сергійович
МПК: F03B 1/00
Мітки: електричну, водний, поверхні, перетворення, вітру, енергії, спосіб, енергію
Формула / Реферат:
1. Спосіб перетворення енергії вітру на водній поверхні в електричну енергію, при якому направляють водний потік на лопатеву систему енергогенеруючої установки, забезпечують розкручування лопатей енергогенеруючої установки до швидкості, при якій здійснюється вироблення електричної енергії електрогенератором енергогенеруючої установки, здійснюють передачу виробленої електрогенератором енергогенеруючої установки електричної енергії до...
Пристрій для перетворення енергії вітру в теплову
Номер патенту: 921
Опубліковано: 16.07.2001
Автори: Лисенко Юлія Анатолівна, Жарков Віктор Якович
МПК: F03D 7/06
Мітки: енергії, теплову, перетворення, вітру, пристрій
Формула / Реферат:
Пристрій для перетворення енергії вітру в теплоту, що містить нерухомий індуктор в вигляді індукційної обмотки, розташованої на нерухомому кільцевому магнітопроводі, рухомий кільцевий магнітопровід за формою і розмірами ідентичний нерухомому магнітопроводу, жорстко зв'язаний з валом вітродвигуна, установлений співвісно з нерухомим магнітопроводом і з фіксованим зазором між прилеглими торцями магнітопроводів, які поміщені в резервуар з...
Установка для нагрівання текучих середовищ та плавких речовин за допомогою енергії вітру і/або сонця
Номер патенту: 44706
Опубліковано: 12.10.2009
Автор: Кметюк Сергій Віталійович
МПК: F24J 2/42
Мітки: допомогою, установка, нагрівання, речовин, сонця, текучих, вітру, плавких, енергії, середовищ
Формула / Реферат:
Установка для нагрівання текучих середовищ та плавких речовин за допомогою енергії вітру і/або сонця, що містить вітродвигун, сонячну батарею, акумуляторну батарею, блок електроживлення, внутрішній теплоелектронагрівач, зовнішній стрічковий еластичний теплоелектронагрівач та бак-ємність з кришкою для нагрівання текучих середовищ та плавких речовин, фотоелектричні перетворювачі та вітродвигун, електрично з'єднані з теплоелектронагрівачами,...
Спосіб перетворення зворотно-поступального руху в обертальний
Номер патенту: 17986
Опубліковано: 16.10.2006
Автори: Цуранов Леонід Олексійович, Жук Микола Олексійович, Іоненко Володимир Іванович, Чернишов Сергій Іванович
МПК: F16H 49/00
Мітки: спосіб, зворотно-поступального, руху, перетворення, обертальний
Формула / Реферат:
Спосіб перетворення зворотно-поступального руху штока, що рухається під дією зовнішніх сил, в обертальний рух кривошипного вала, осі яких знаходяться в одній площині та розташовані під прямим кутом одна до одної, за допомогою шарнірно з'єднаного зі штоком шатуна, другий кінець якого шарнірно з'єднаний з кривошипом вала, який відрізняється тим, що кривошип або шатун може змінювати свою довжину за заданою програмою, і/або стискаючи чи...
Попередній патент: Пальниковий пристрій
Наступний патент: Термолюмінесцентний детектор
Випадковий патент: Вихрострумовий спосіб визначення ступеня експлуатаційної деградації конструкційних матеріалів