Пристрій введення символів і спосіб його застосування
Формула / Реферат
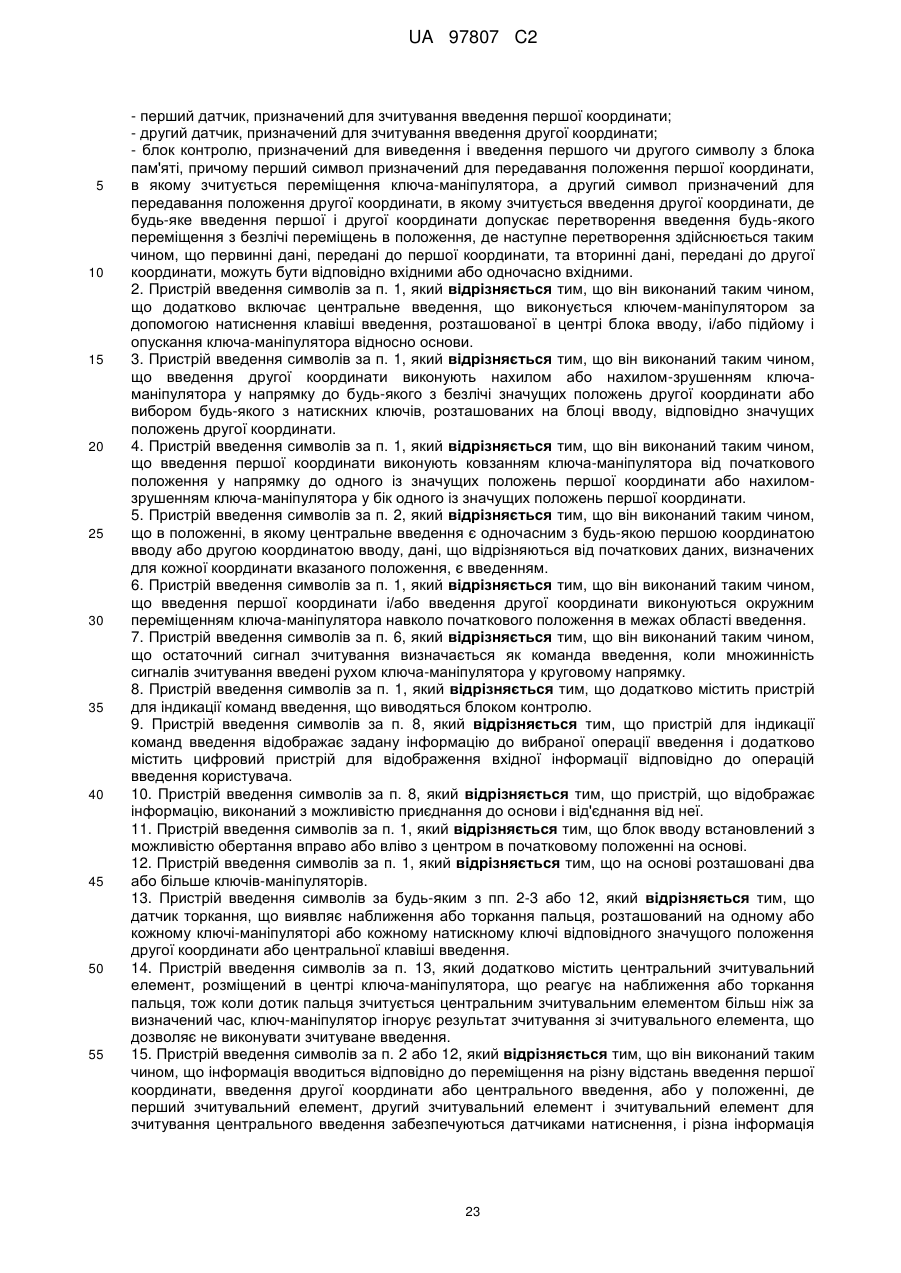
1. Пристрій введення символів, що містить:
- основу;
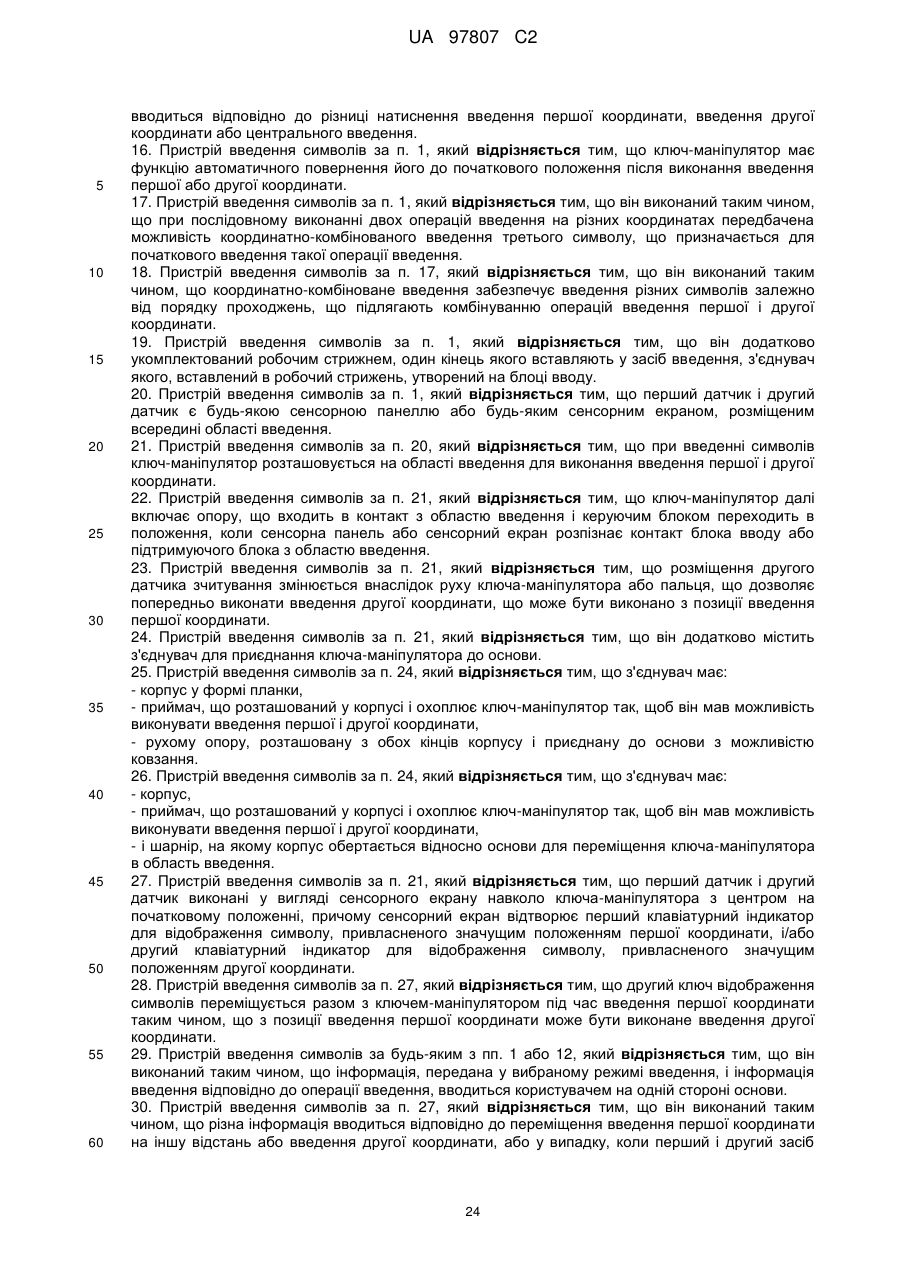
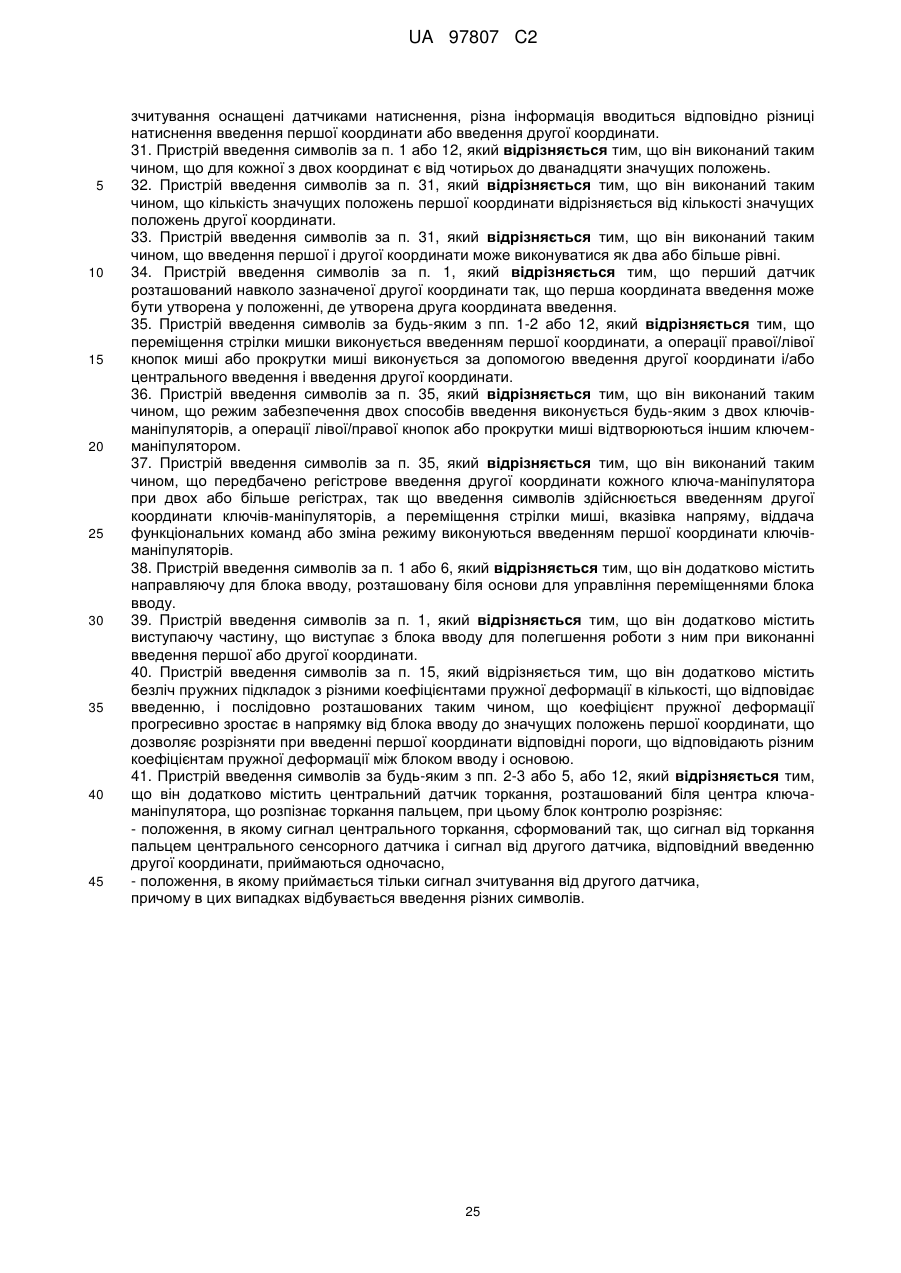
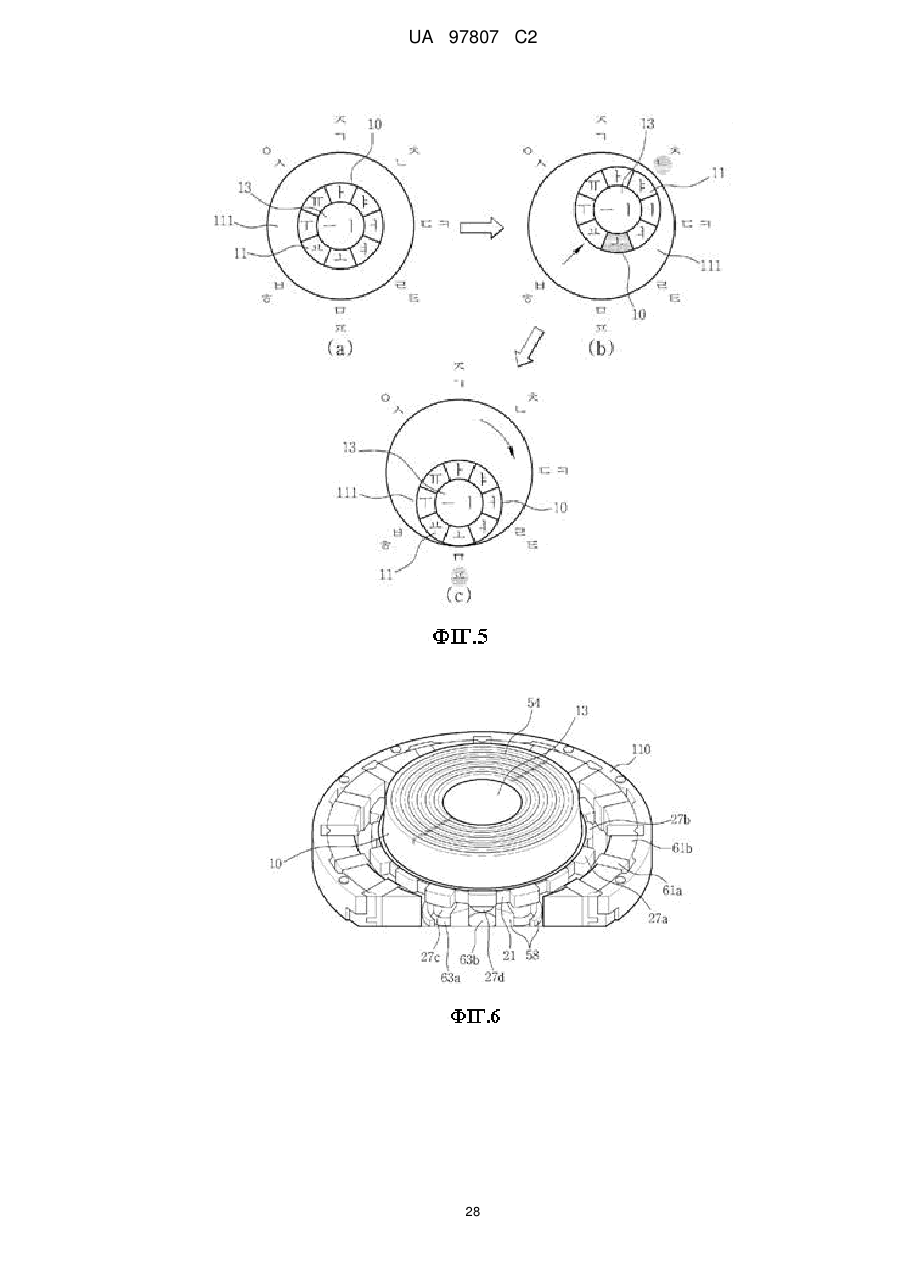
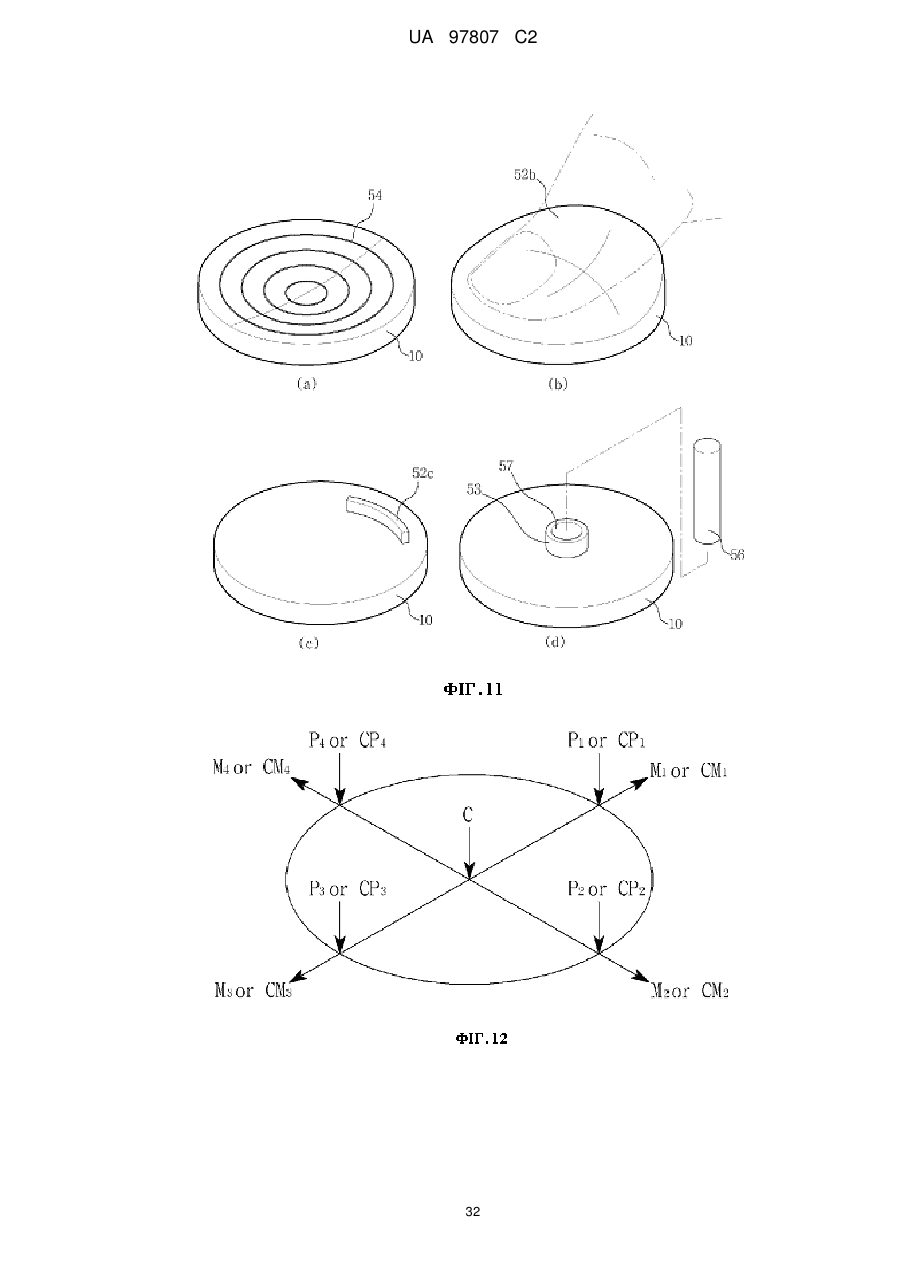
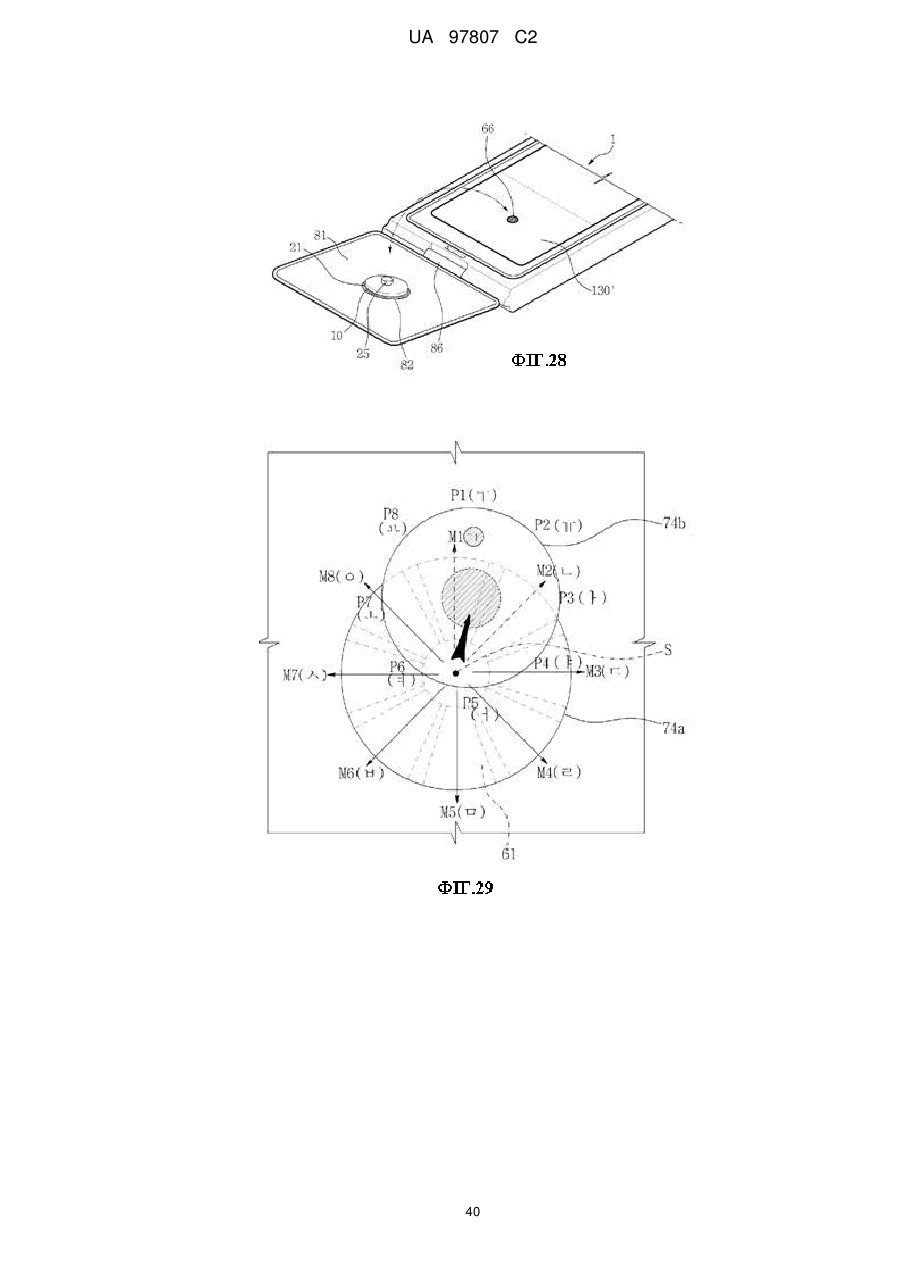
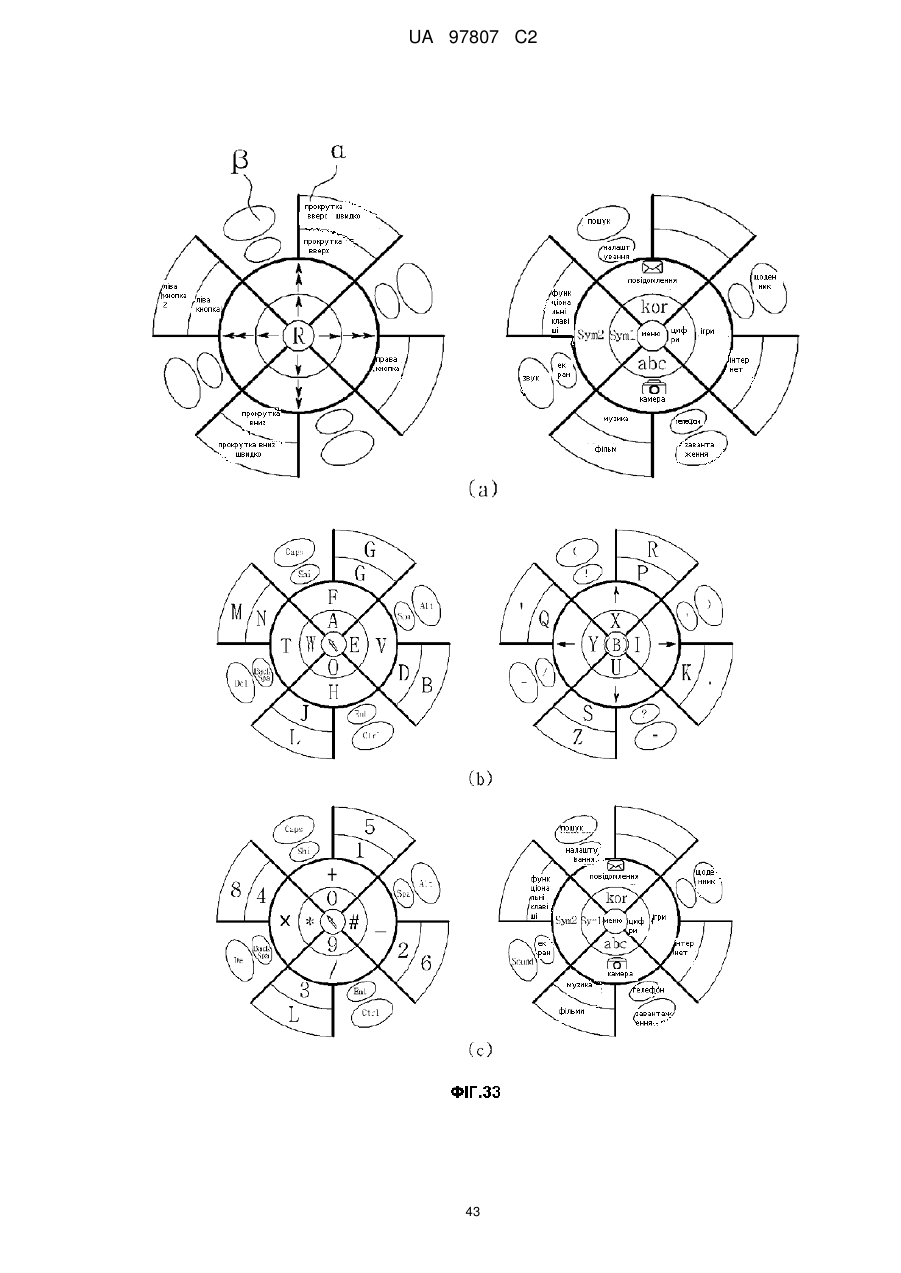
- блок вводу, розташований на основі з можливістю незалежного введення по двох координатах, причому введення першої координати виконується переміщенням ключа-маніпулятора від початкового положення до будь-якого з безлічі значущих положень, рознесених по колу щодо початкового положення в межах заданої області введення, а введення другої координати виконується вибором з множини значущих положень, рознесених по колу на самому ключі-маніпуляторі;
- перший датчик, призначений для зчитування введення першої координати;
- другий датчик, призначений для зчитування введення другої координати;
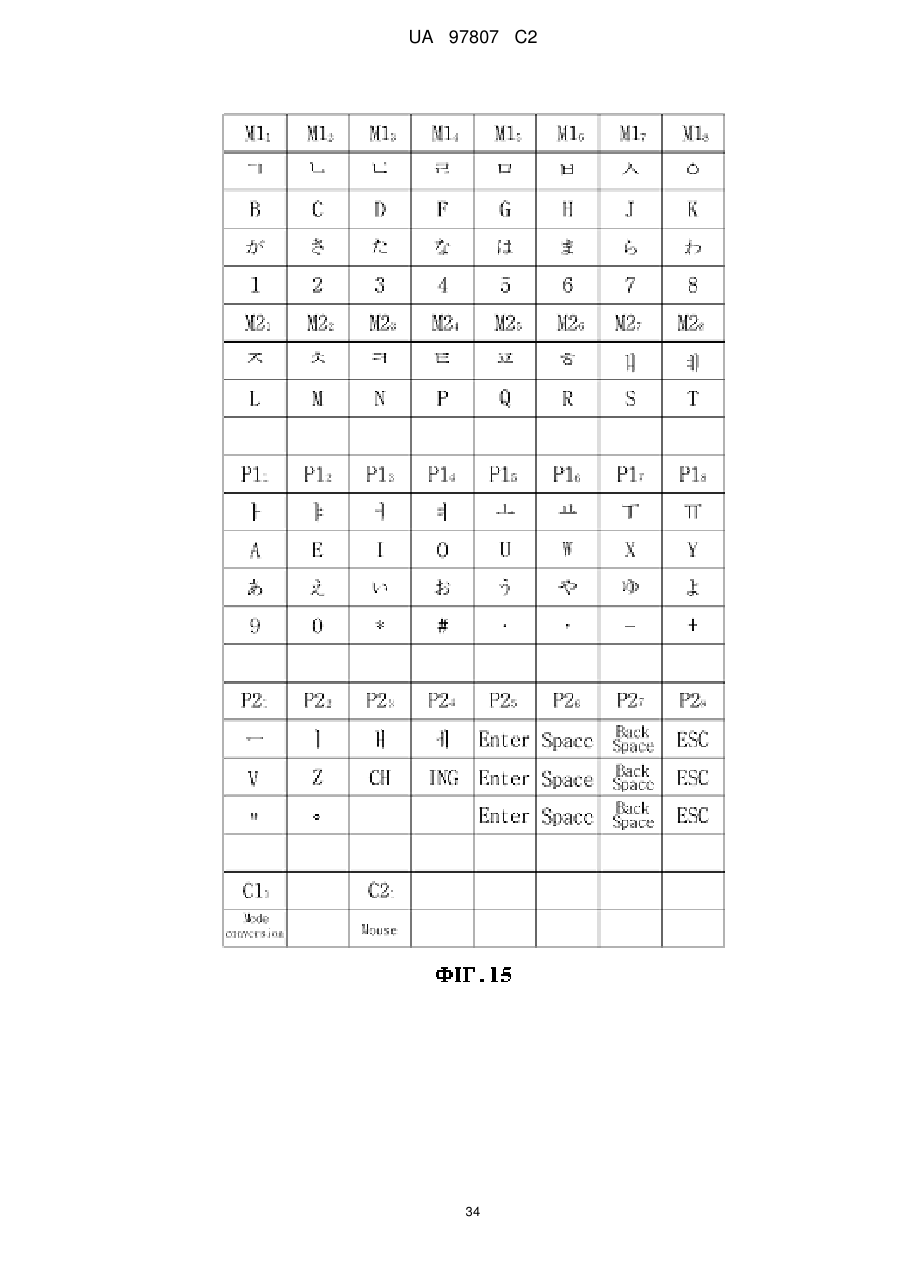
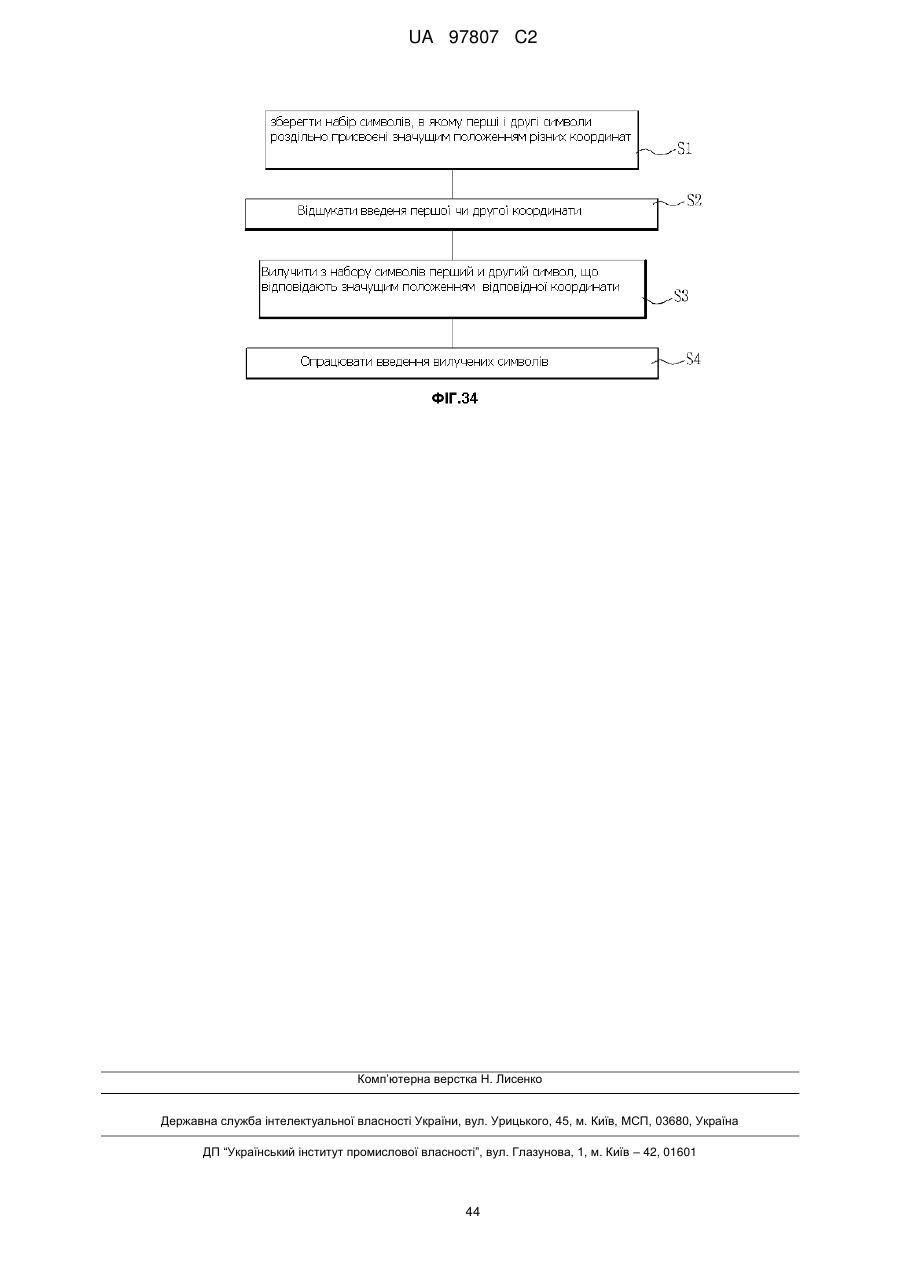
- блок контролю, призначений для виведення і введення першого чи другого символу з блока пам'яті, причому перший символ призначений для передавання положення першої координати, в якому зчитується переміщення ключа-маніпулятора, а другий символ призначений для передавання положення другої координати, в якому зчитується введення другої координати, де будь-яке введення першої і другої координати допускає перетворення введення будь-якого переміщення з безлічі переміщень в положення, де наступне перетворення здійснюється таким чином, що первинні дані, передані до першої координати, та вторинні дані, передані до другої координати, можуть бути відповідно вхідними або одночасно вхідними.
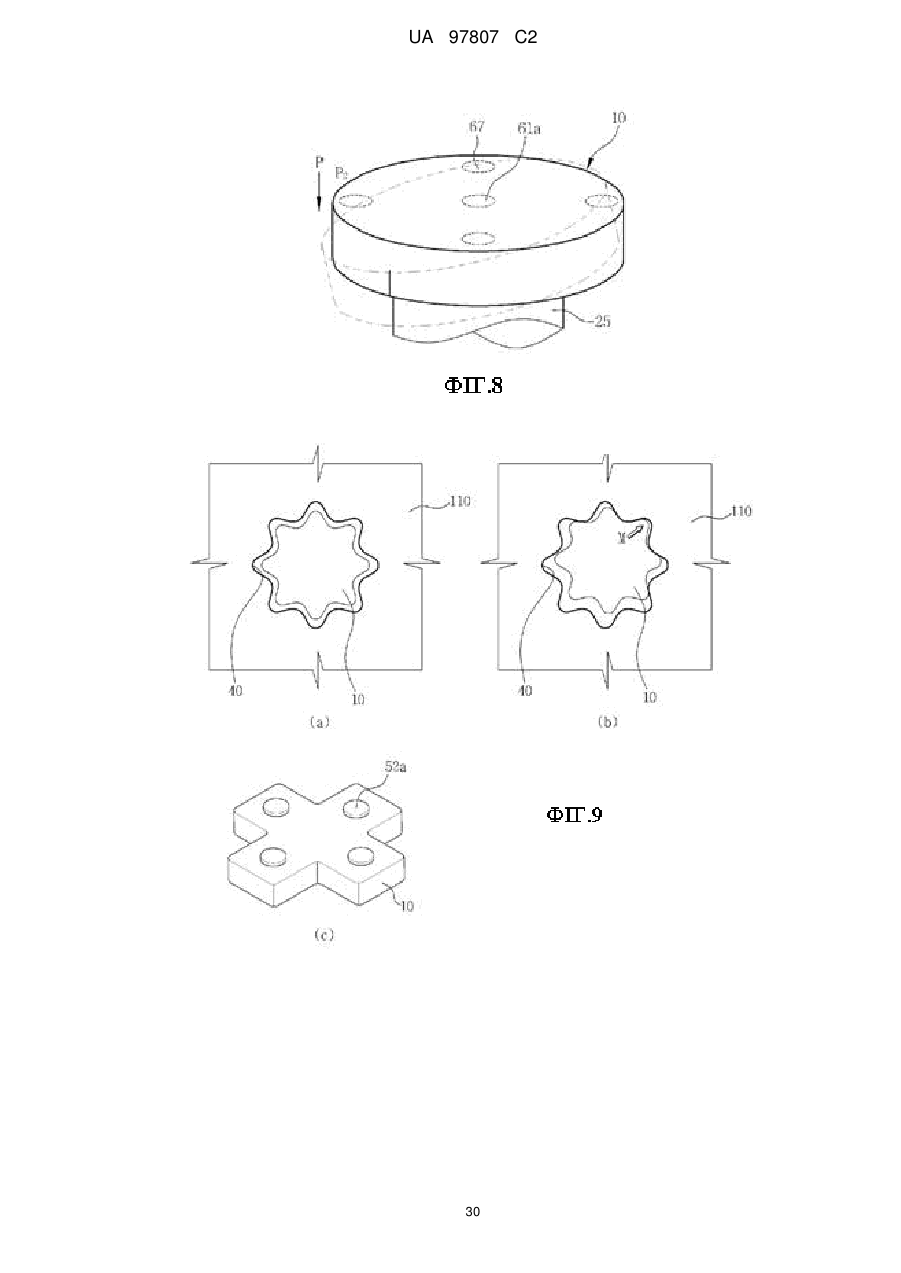
2. Пристрій введення символів за п. 1, який відрізняється тим, що він виконаний таким чином, що додатково включає центральне введення, що виконується ключем-маніпулятором за допомогою натиснення клавіші введення, розташованої в центрі блока вводу, і/або підйому і опускання ключа-маніпулятора відносно основи.
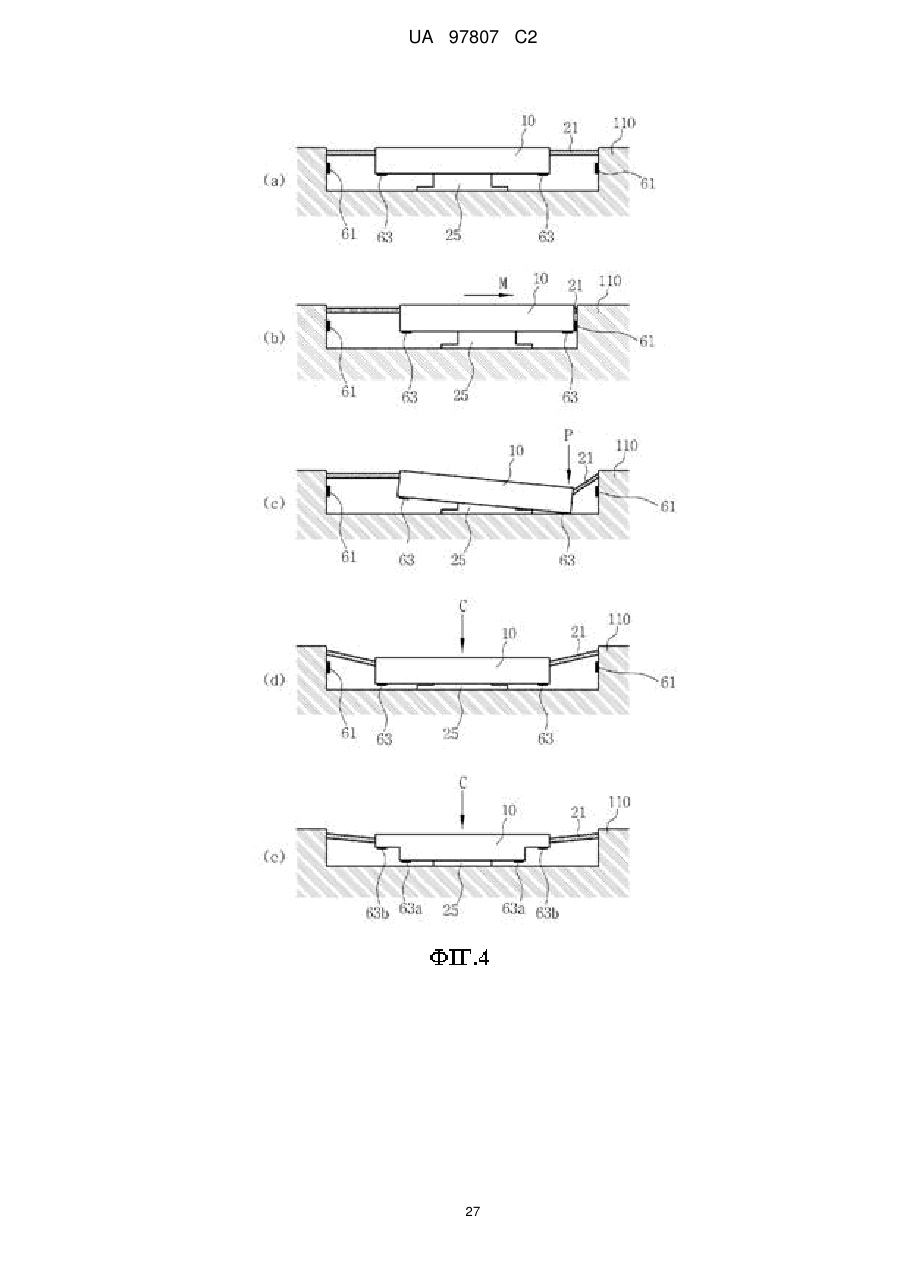
3. Пристрій введення символів за п. 1, який відрізняється тим, що він виконаний таким чином, що введення другої координати виконують нахилом або нахилом-зрушенням ключа-маніпулятора у напрямку до будь-якого з безлічі значущих положень другої координати або вибором будь-якого з натискних ключів, розташованих на блоці вводу, відповідно значущих положень другої координати.
4. Пристрій введення символів за п. 1, який відрізняється тим, що він виконаний таким чином, що введення першої координати виконують ковзанням ключа-маніпулятора від початкового положення у напрямку до одного із значущих положень першої координати або нахилом-зрушенням ключа-маніпулятора у бік одного із значущих положень першої координати.
5. Пристрій введення символів за п. 2, який відрізняється тим, що він виконаний таким чином, що в положенні, в якому центральне введення є одночасним з будь-якою першою координатою вводу або другою координатою вводу, дані, що відрізняються від початкових даних, визначених для кожної координати вказаного положення, є введенням.
6. Пристрій введення символів за п. 1, який відрізняється тим, що він виконаний таким чином, що введення першої координати і/або введення другої координати виконуються окружним переміщенням ключа-маніпулятора навколо початкового положення в межах області введення.
7. Пристрій введення символів за п. 6, який відрізняється тим, що він виконаний таким чином, що остаточний сигнал зчитування визначається як команда введення, коли множинність сигналів зчитування введені рухом ключа-маніпулятора у круговому напрямку.
8. Пристрій введення символів за п. 1, який відрізняється тим, що додатково містить пристрій для індикації команд введення, що виводяться блоком контролю.
9. Пристрій введення символів за п. 8, який відрізняється тим, що пристрій для індикації команд введення відображає задану інформацію до вибраної операції введення і додатково містить цифровий пристрій для відображення вхідної інформації відповідно до операцій введення користувача.
10. Пристрій введення символів за п. 8, який відрізняється тим, що пристрій, що відображає інформацію, виконаний з можливістю приєднання до основи і від'єднання від неї.
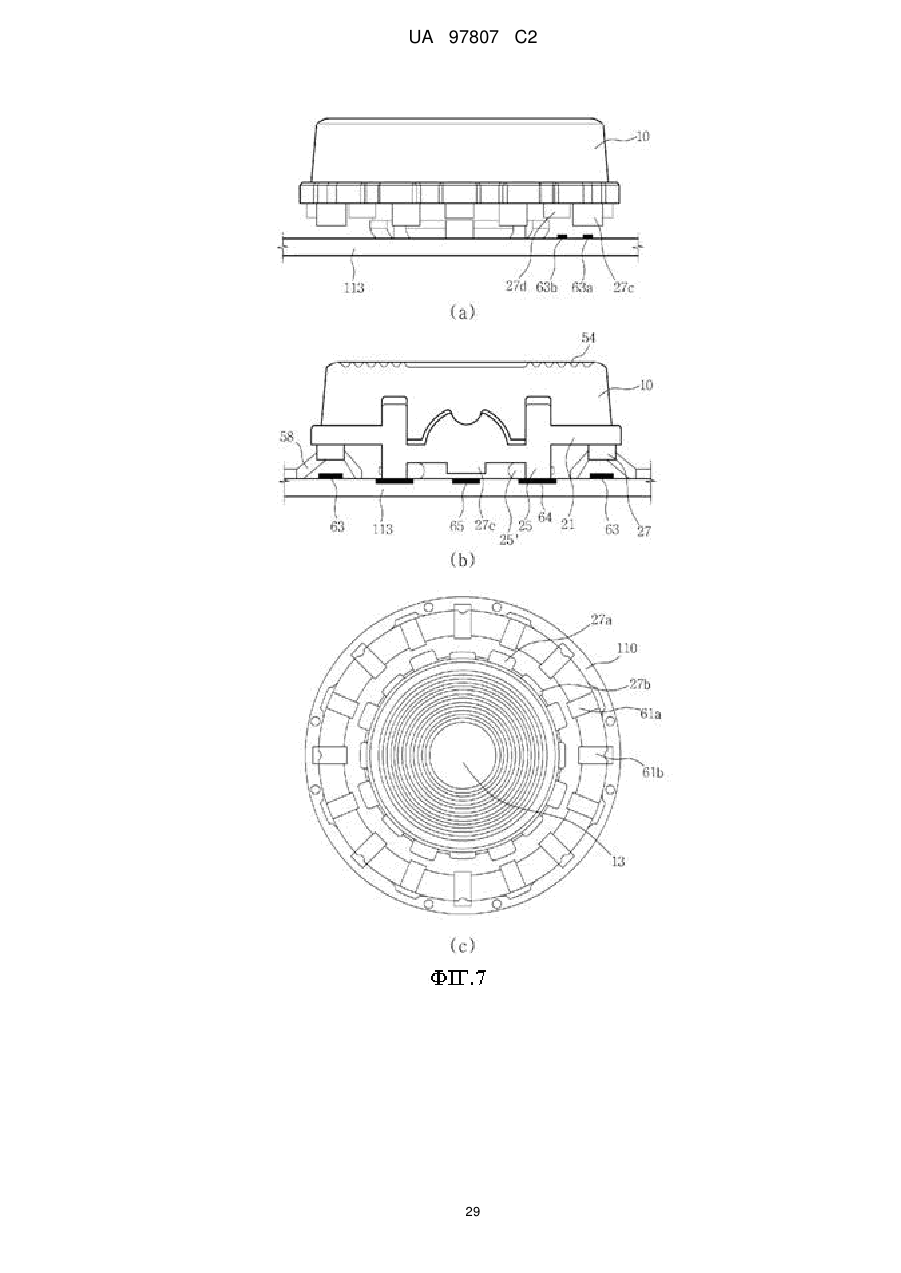
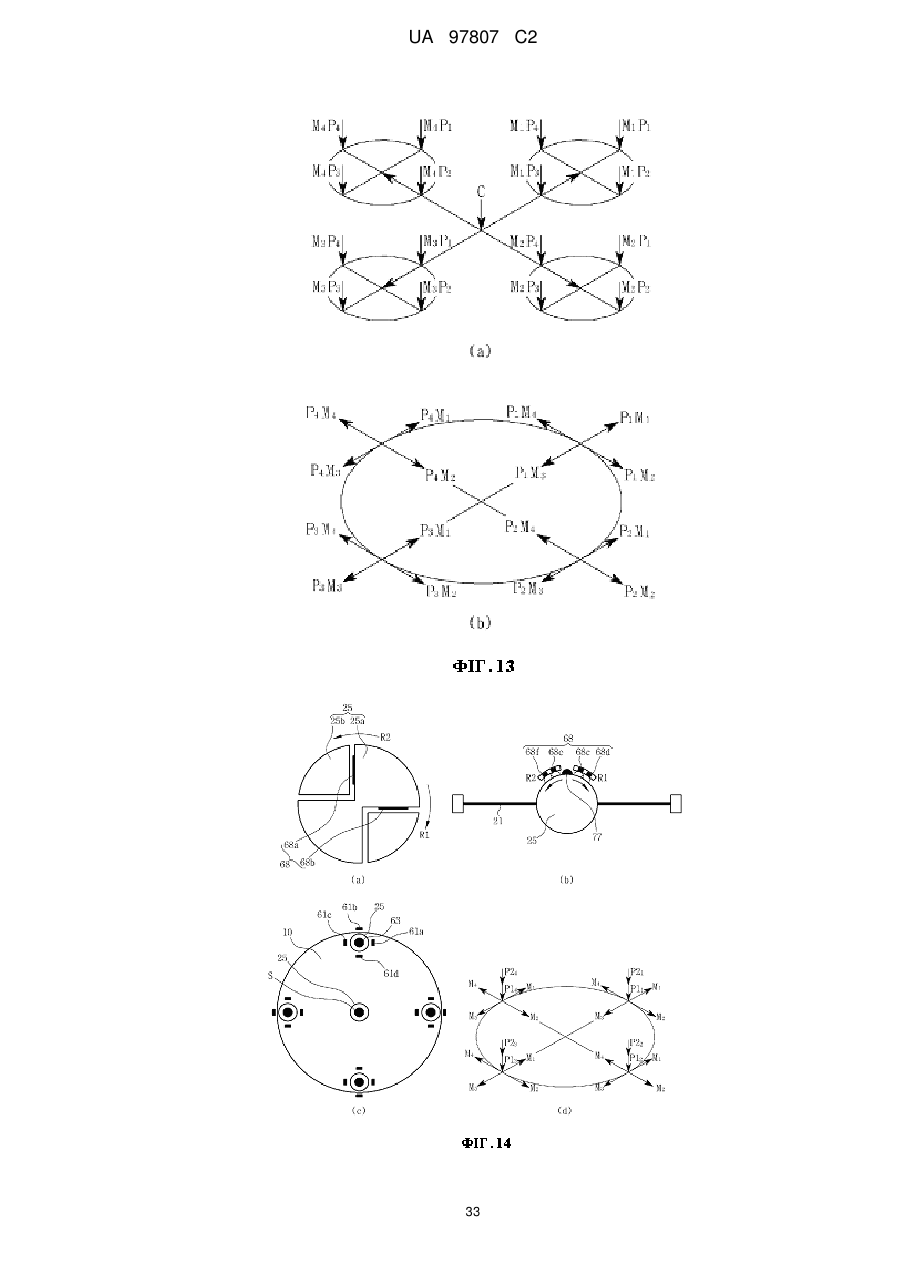
11. Пристрій введення символів за п. 1, який відрізняється тим, що блок вводу встановлений з можливістю обертання вправо або вліво з центром в початковому положенні на основі.
12. Пристрій введення символів за п. 1, який відрізняється тим, що на основі розташовані два або більше ключів-маніпуляторів.
13. Пристрій введення символів за будь-яким з пп. 2-3 або 12, який відрізняється тим, що датчик торкання, що виявляє наближення або торкання пальця, розташований на одному або кожному ключі-маніпуляторі або кожному натискному ключі відповідного значущого положення другої координати або центральної клавіші введення.
14. Пристрій введення символів за п. 13, який додатково містить центральний зчитувальний елемент, розміщений в центрі ключа-маніпулятора, що реагує на наближення або торкання пальця, тож коли дотик пальця зчитується центральним зчитувальним елементом більш ніж за визначений час, ключ-маніпулятор ігнорує результат зчитування зі зчитувального елемента, що дозволяє не виконувати зчитуване введення.
15. Пристрій введення символів за п. 2 або 12, який відрізняється тим, що він виконаний таким чином, що інформація вводиться відповідно до переміщення на різну відстань введення першої координати, введення другої координати або центрального введення, або у положенні, де перший зчитувальний елемент, другий зчитувальний елемент і зчитувальний елемент для зчитування центрального введення забезпечуються датчиками натиснення, і різна інформація вводиться відповідно до різниці натиснення введення першої координати, введення другої координати або центрального введення.
16. Пристрій введення символів за п. 1, який відрізняється тим, що ключ-маніпулятор має функцію автоматичного повернення його до початкового положення після виконання введення першої або другої координати.
17. Пристрій введення символів за п. 1, який відрізняється тим, що він виконаний таким чином, що при послідовному виконанні двох операцій введення на різних координатах передбачена можливість координатно-комбінованого введення третього символу, що призначається для початкового введення такої операції введення.
18. Пристрій введення символів за п. 17, який відрізняється тим, що він виконаний таким чином, що координатно-комбіноване введення забезпечує введення різних символів залежно від порядку проходжень, що підлягають комбінуванню операцій введення першої і другої координати.
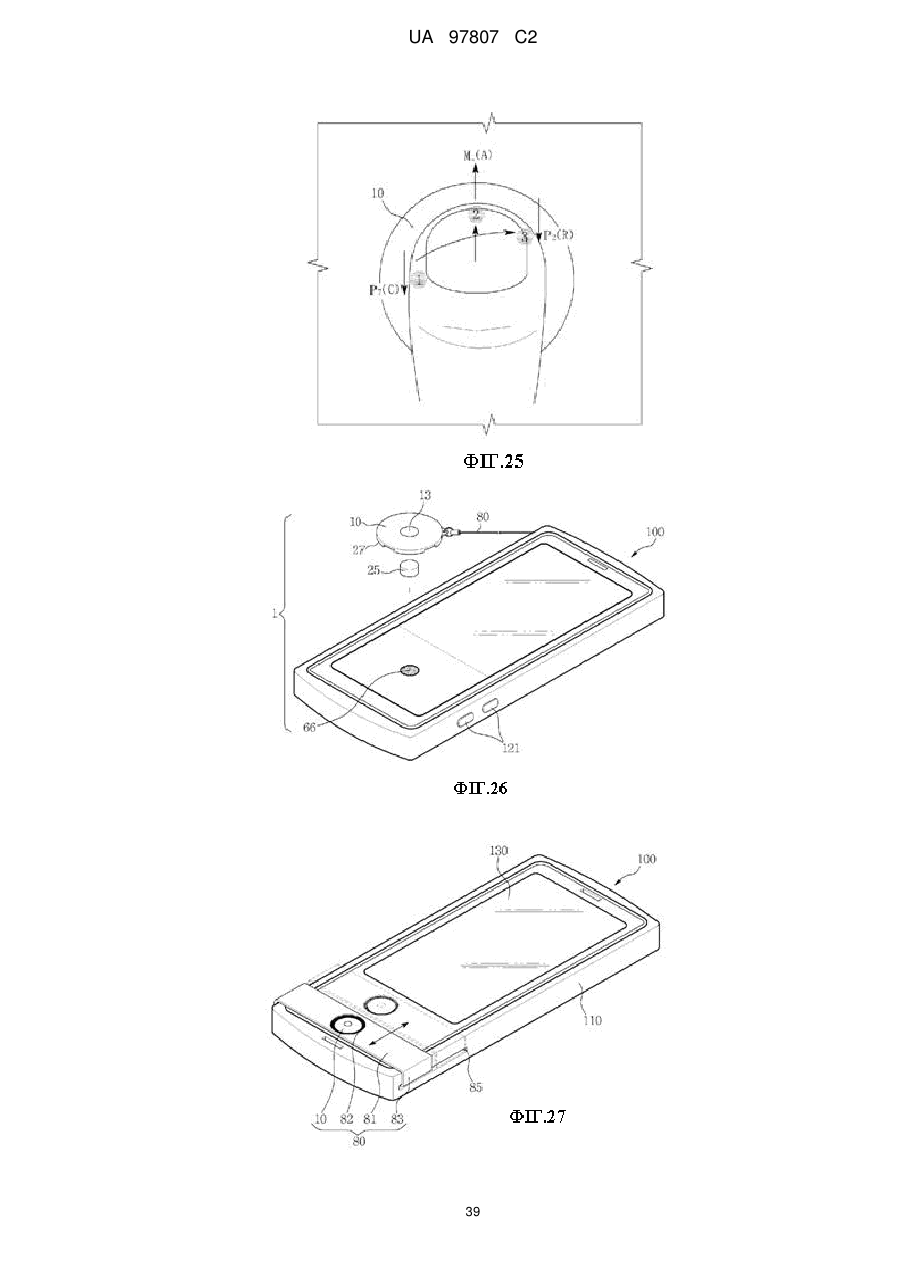
19. Пристрій введення символів за п. 1, який відрізняється тим, що він додатково укомплектований робочим стрижнем, один кінець якого вставляють у засіб введення, з'єднувач якого, вставлений в робочий стрижень, утворений на блоці вводу.
20. Пристрій введення символів за п. 1, який відрізняється тим, що перший датчик і другий датчик є будь-якою сенсорною панеллю або будь-яким сенсорним екраном, розміщеним всередині області введення.
21. Пристрій введення символів за п. 20, який відрізняється тим, що при введенні символів ключ-маніпулятор розташовується на області введення для виконання введення першої і другої координати.
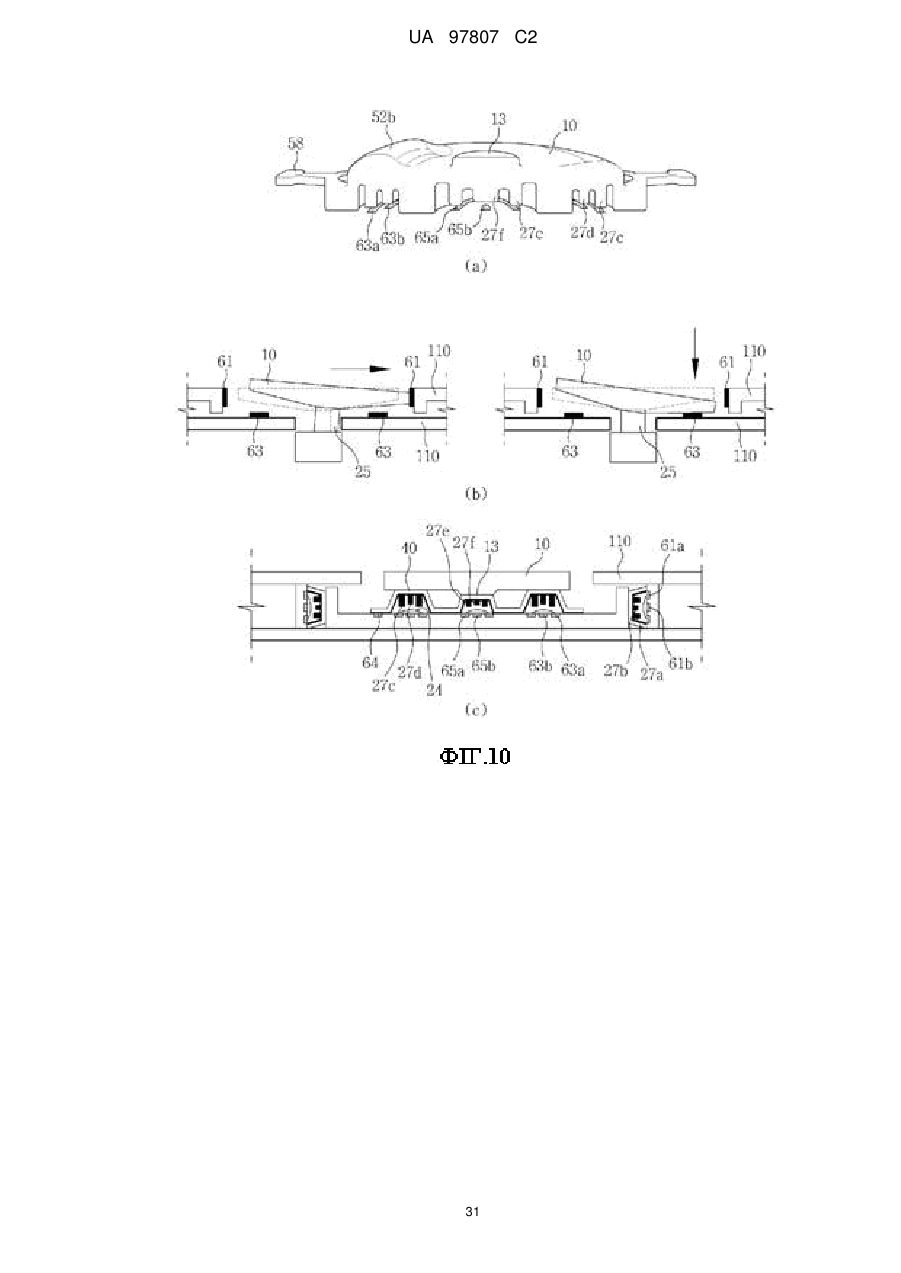
22. Пристрій введення символів за п. 21, який відрізняється тим, що ключ-маніпулятор далі включає опору, що входить в контакт з областю введення і керуючим блоком переходить в положення, коли сенсорна панель або сенсорний екран розпізнає контакт блока вводу або підтримуючого блока з областю введення.
23. Пристрій введення символів за п. 21, який відрізняється тим, що розміщення другого датчика зчитування змінюється внаслідок руху ключа-маніпулятора або пальця, що дозволяє попередньо виконати введення другої координати, що може бути виконано з позиції введення першої координати.
24. Пристрій введення символів за п. 21, який відрізняється тим, що він додатково містить з'єднувач для приєднання ключа-маніпулятора до основи.
25. Пристрій введення символів за п. 24, який відрізняється тим, що з'єднувач має:
- корпус у формі планки,
- приймач, що розташований у корпусі і охоплює ключ-маніпулятор так, щоб він мав можливість виконувати введення першої і другої координати,
- рухому опору, розташовану з обох кінців корпусу і приєднану до основи з можливістю ковзання.
26. Пристрій введення символів за п. 24, який відрізняється тим, що з'єднувач має:
- корпус,
- приймач, що розташований у корпусі і охоплює ключ-маніпулятор так, щоб він мав можливість виконувати введення першої і другої координати,
- і шарнір, на якому корпус обертається відносно основи для переміщення ключа-маніпулятора в область введення.
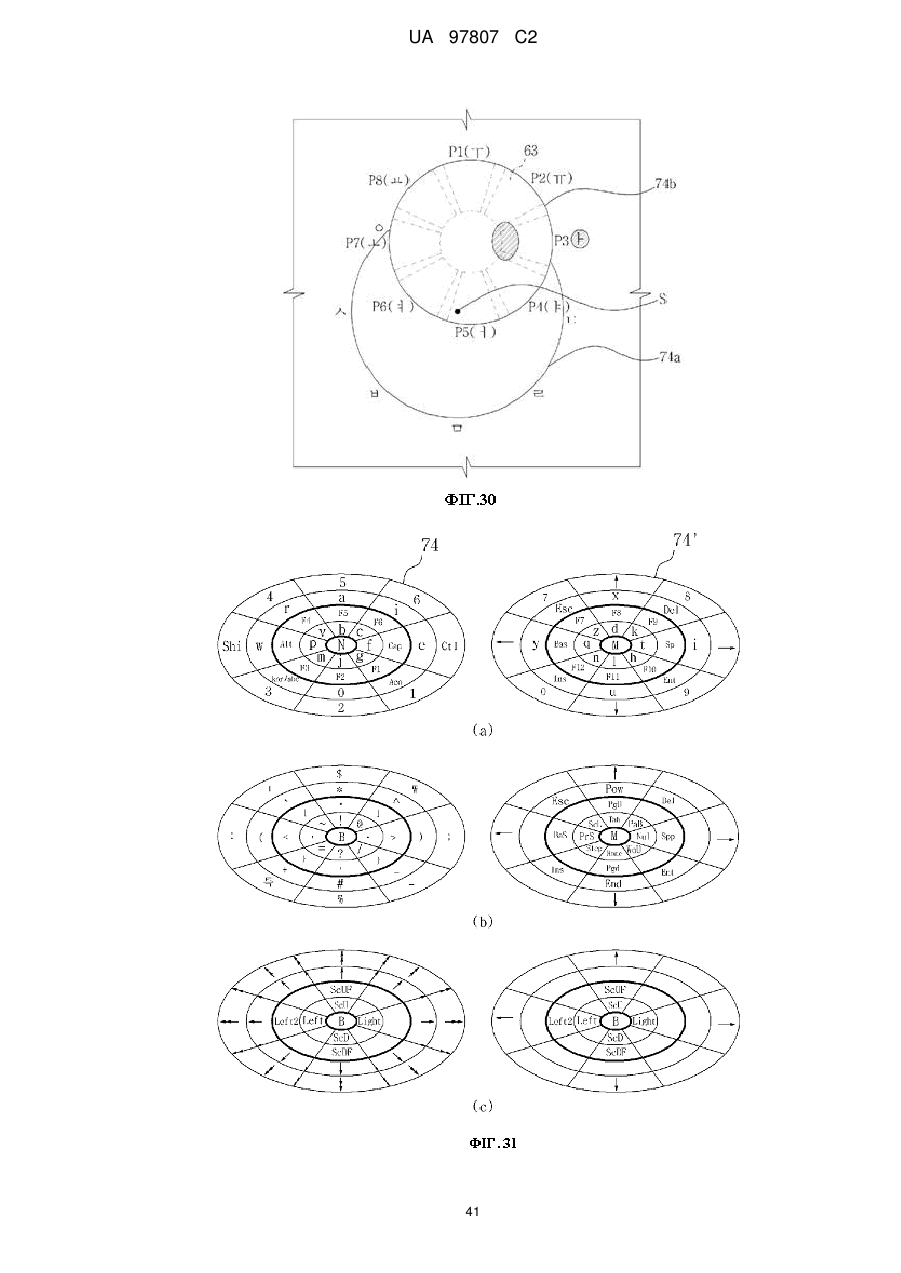
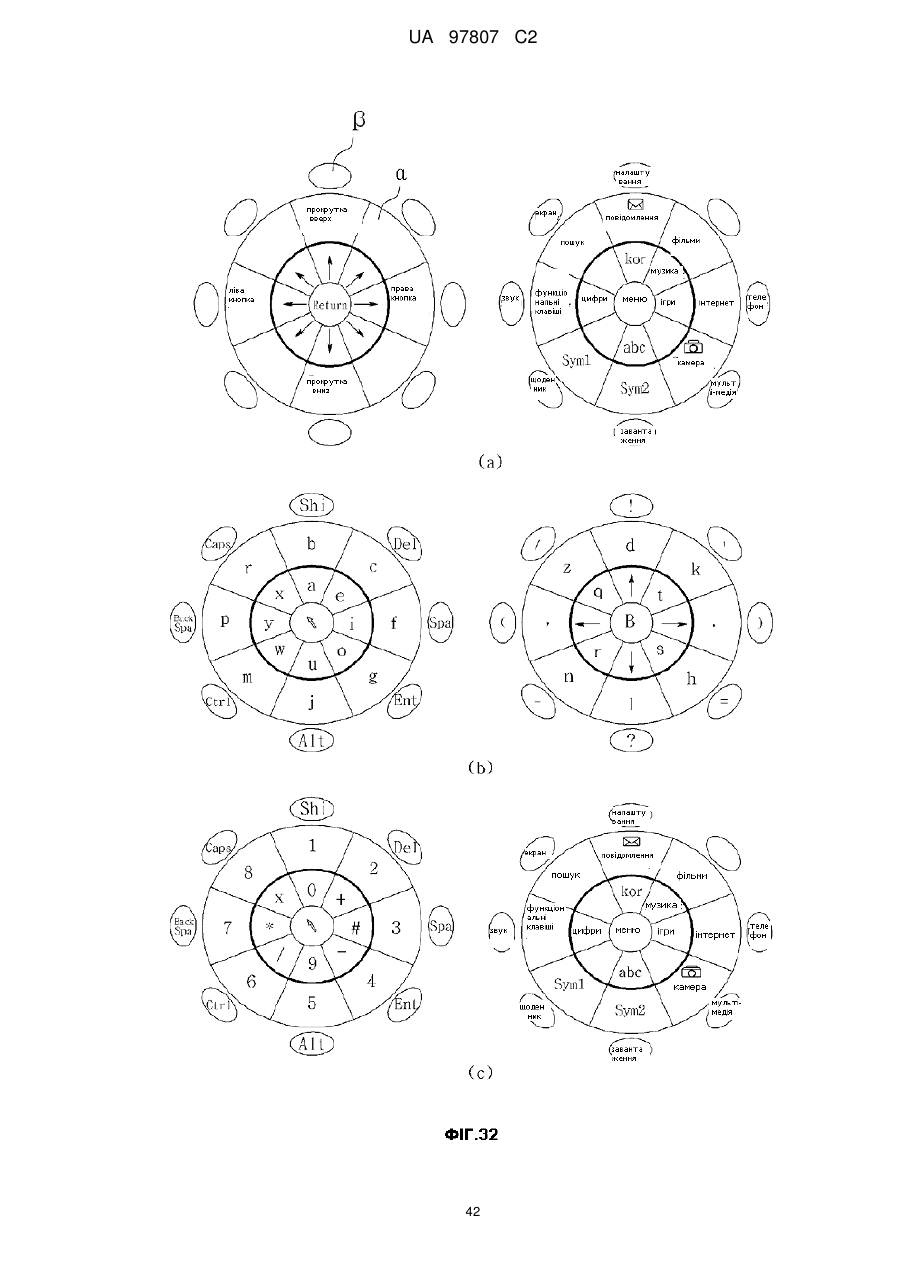
27. Пристрій введення символів за п. 21, який відрізняється тим, що перший датчик і другий датчик виконані у вигляді сенсорного екрану навколо ключа-маніпулятора з центром на початковому положенні, причому сенсорний екран відтворює перший клавіатурний індикатор для відображення символу, привласненого значущим положенням першої координати, і/або другий клавіатурний індикатор для відображення символу, привласненого значущим положенням другої координати.
28. Пристрій введення символів за п. 27, який відрізняється тим, що другий ключ відображення символів переміщується разом з ключем-маніпулятором під час введення першої координати таким чином, що з позиції введення першої координати може бути виконане введення другої координати.
29. Пристрій введення символів за будь-яким з пп. 1 або 12, який відрізняється тим, що він виконаний таким чином, що інформація, передана у вибраному режимі введення, і інформація введення відповідно до операції введення, вводиться користувачем на одній стороні основи.
30. Пристрій введення символів за п. 27, який відрізняється тим, що він виконаний таким чином, що різна інформація вводиться відповідно до переміщення введення першої координати на іншу відстань або введення другої координати, або у випадку, коли перший і другий засіб зчитування оснащені датчиками натиснення, різна інформація вводиться відповідно різниці натиснення введення першої координати або введення другої координати.
31. Пристрій введення символів за п. 1 або 12, який відрізняється тим, що він виконаний таким чином, що для кожної з двох координат є від чотирьох до дванадцяти значущих положень.
32. Пристрій введення символів за п. 31, який відрізняється тим, що він виконаний таким чином, що кількість значущих положень першої координати відрізняється від кількості значущих положень другої координати.
33. Пристрій введення символів за п. 31, який відрізняється тим, що він виконаний таким чином, що введення першої і другої координати може виконуватися як два або більше рівні.
34. Пристрій введення символів за п. 1, який відрізняється тим, що перший датчик розташований навколо зазначеної другої координати так, що перша координата введення може бути утворена у положенні, де утворена друга координата введення.
35. Пристрій введення символів за будь-яким з пп. 1-2 або 12, який відрізняється тим, що переміщення стрілки мишки виконується введенням першої координати, а операції правої/лівої кнопок миші або прокрутки миші виконується за допомогою введення другої координати і/або центрального введення і введення другої координати.
36. Пристрій введення символів за п. 35, який відрізняється тим, що він виконаний таким чином, що режим забезпечення двох способів введення виконується будь-яким з двох ключів-маніпуляторів, а операції лівої/правої кнопок або прокрутки миші відтворюються іншим ключем-маніпулятором.
37. Пристрій введення символів за п. 35, який відрізняється тим, що він виконаний таким чином, що передбачено регістрове введення другої координати кожного ключа-маніпулятора при двох або більше регістрах, так що введення символів здійснюється введенням другої координати ключів-маніпуляторів, а переміщення стрілки миші, вказівка напряму, віддача функціональних команд або зміна режиму виконуються введенням першої координати ключів-маніпуляторів.
38. Пристрій введення символів за п. 1 або 6, який відрізняється тим, що він додатково містить направляючу для блока вводу, розташовану біля основи для управління переміщеннями блока вводу.
39. Пристрій введення символів за п. 1, який відрізняється тим, що він додатково містить виступаючу частину, що виступає з блока вводу для полегшення роботи з ним при виконанні введення першої або другої координати.
40. Пристрій введення символів за п. 15, який відрізняється тим, що він додатково містить безліч пружних підкладок з різними коефіцієнтами пружної деформації в кількості, що відповідає введенню, і послідовно розташованих таким чином, що коефіцієнт пружної деформації прогресивно зростає в напрямку від блока вводу до значущих положень першої координати, що дозволяє розрізняти при введенні першої координати відповідні пороги, що відповідають різним коефіцієнтам пружної деформації між блоком вводу і основою.
41. Пристрій введення символів за будь-яким з пп. 2-3 або 5, або 12, який відрізняється тим, що він додатково містить центральний датчик торкання, розташований біля центра ключа-маніпулятора, що розпізнає торкання пальцем, при цьому блок контролю розрізняє:
- положення, в якому сигнал центрального торкання, сформований так, що сигнал від торкання пальцем центрального сенсорного датчика і сигнал від другого датчика, відповідний введенню другої координати, приймаються одночасно,
- положення, в якому приймається тільки сигнал зчитування від другого датчика,
причому в цих випадках відбувається введення різних символів.
Текст
Реферат: Представлений пристрій введення символів і спосіб його застосування. Пристрій введення символів містить: основу; блок вводу, розташований на основі з можливістю незалежного введення по двох координатах, причому введення першої координати виконується переміщенням ключа-маніпулятора від початкового положення до будь-якого з безлічі значущих положень, рознесених по колу щодо початкового положення в межах заданої області введення, а введення другої координати виконується вибором з множини значущих положень, UA 97807 C2 (12) UA 97807 C2 рознесених по колу на самому ключі-маніпуляторі; перший датчик, призначений для зчитування введення першої координати; другий датчик, призначений для зчитування введення другої координати; блок контролю, призначений для виведення і введення першого або другого символу з блока пам'яті, причому перший символ привласнений значущому положенню першої координати, в якому зчитується переміщення ключа-маніпулятора, а другий символ привласнений значущому положенню другої координати, в якому зчитується введення другої координати, що дає можливість звести до мінімуму простір, необхідний для введення символів, і забезпечити безпомилкове введення будь-якого бажаного користувачем символу. UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 Даний винахід відноситься до пристрою введення символів і способу його застосування і, зокрема, до пристрою введення символів і способу його застосування, який дозволяє вводити найбільше число символів за один прийом при мінімальних розмірах області введення, а також дозволяють швидко і безпомилково вводити одну або більше фонем в один прийом за допомогою одночасного або послідовного виконання введення двох координат одним ключемманіпулятором. У міру розвитку програмного забезпечення і напівпровідникової техніки, а також технології обробки інформації, пристрої обробки інформації прагнуть до мініатюризації. Таким чином, в різних пристроях обробки інформації поступово зростає значущість введення символів. Однак такі пристрої обробки інформації стикаються з багатьма проблемами при введенні різних символів або команд. Наприклад, оскільки пристрій введення, такий, як використовувана в персональному комп'ютері (ПК) або ноутбуку клавіатура, не може бути довільно зменшено в розмірі, складно зменшувати розмір пристроїв обробки інформації. До того ж сенсорні екрани, використовувані в кишенькових персональних комп'ютерах (КПК), клавіатури стільникових телефонів мають низьку швидкість введення або сприяють помилкам, що створює масу незручностей. Для прискорення введення символів і цифр в пристроях обробки інформації, як вищезгадані ПК, ноутбук, ПКП, або стільниковий телефон, необхідно проводити введення однієї фонеми (символу) за один прийом. Для введення символів корейського національного алфавіту хангиль, з розрахунком однієї операції на фонему, пристрій обробки інформації повинен мати кнопки або клавіші введення для введення більше двадцяти чотирьох символів. При введенні символів англійського, японського або іншого іноземного алфавіту може знадобитися значно більше кнопок або клавіш введення, ніж для введення символів алфавіту хангиль. Оскільки портативний термінал поступово освоює функції настільного ПК необхідно, щоб він імітував весь функціональний набір клавіатури, включаючи різні керуючі клавіші (введення, пропуск, перемикання регістра та інші), функціональні клавіші, неалфавітні символи і так далі, крім функції введення символів. Однак, в звичайних пристроях введення, використовуваних в різних пристроях обробки інформації, привласнені кожній клавіші символи вводять натисненням цих клавіш пальцями. При цьому, в портативному персональному комунікаторі, такому як стільниковий телефон, де область з клавішами введення порівняно обмежена в розмірах, складно розташувати більше двадцяти чотирьох клавіш за розміром пальця. З цієї причини мініатюризація клавіатури до теперішнього часу була складним завданням. Зокрема, у разі стільникового телефону, оскільки необхідно ввести більше двадцяти чотирьох символів алфавіту хангиль, в загальному випадку, дванадцяти кнопок, неминуче доведеться призначити ряд символів з накладенням однієї кнопки. Отже, для введення одного символу (фонеми) необхідно повторно натискати одну кнопку два або три рази. В результаті, зростає час введення і частіше виникають друкарські помилки. Далі, оскільки такий спосіб введення знаків є вельми складним, потрібний тривалий час для того, щоб користувач цілком освоїв даний спосіб. Для вирішення вищезазначених проблем стосовно символів алфавіту хангиль були запропоновані способи введення символів комбінуванням символів з деякого набору, наприклад, система Чи Інь Чен. Подібним способом, оскільки необхідні символи складаються з базових символів, кількість кнопок введення, яким призначаються символи, скорочується. Оскільки необхідно багато разів натискати кнопки введення до отримання бажаної комбінації символів, час введення не зменшується. Крім того, були запропоновані пристрої, такі як переносна скачувана клавіатура або віртуальна лазерна клавіатура, де введення проводиться за допомогою проектування зображення клавіатури на плоску ділянку і зчитування положень пальців, коли користувач проводить операцію натиснення клавіш клавіатури пальцями на зображенні. Однак пристрій введення такого типу незручний, оскільки його завжди необхідно мати при собі. Також, ним можна скористатися тільки тоді, коли пристрій введення поміщений на рівне місце, тому такий пристрій введення не підходить для застосування його в портативному персональному комунікаторі, де користувач може проводити введення на ходу, утримуючи пристрій рукою/руками. 1 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Таким чином, задачею даного винаходу є вирішення вищезгаданих проблем, і одна з цілей даного винаходу - створити пристрій введення символів з ключем-маніпулятором нового типу для незалежного або комбінованого введення першої і другої координат, такий, що необхідна область для введення символів і інших даних мінімальна, і при цьому всі необхідні символи вводяться швидко і безпомилково в один прийом, і при цьому максимальна кількість клавіш, які можна призначити в заданій області за допомогою регістрового введення і спареної конфігурації, так що всі операції введення, що виконуються за допомогою клавіатури і миші, використовуваних в настільних ПК, також можуть бути швидко і просто виконані на портативному терміналі. Інша мета даного винаходу - створити пристрій введення символів, який може вводити одну або більш фонем за один прийом за допомогою додавання різних способів введення або їх поєднання, на додаток до введення першої і другої координат. Згідно даного винаходу, вищезгадані та інші цілі можуть бути досягнуті за допомогою пристрою 1 введення символів, який містить: - основу 110; - ключ-маніпулятор 10, заміщений у основу 110 з можливістю незалежного введення М першої координати і введення Р другої координати, причому введення М виконується переміщенням ключа-маніпулятора від початкового положення S до будь-якого з безлічі значущих положень М1, М2, ..., першої координати, що рознесли по колу від початкового положення S в межах заданої області 11 введення, а введення Р другої координати виконується вибором будь-якого з безлічі значущих положень Р1, Р2, …, другої координати, що рознесені по колу в самому ключі-маніпуляторі 10; - перший датчик 61 для зчитування переміщення ключа-маніпулятора 10; - другий датчик 63 для зчитування введення Р другої координати; - і контролер 51, призначений для витягання і введення першого або другого символу з блоку 55 пам'яті, причому перший символ привласнений кожному із значущих положень М 1, М2, ..., першої координати, в яких зчитується переміщення ключа-маніпулятора 10, а другий символ привласнений кожному із значущих положень Р1, Р2, …, другої координати, в яких зчитується введення Р другої координати. Введення М першої координати може бути виконане ковзанням ключа-маніпулятора 10 з початкового положення S до будь-якого значущого положення М1, М2, ... першої координати. Введення М першої координати може бути виконане нахилом-ковзанням ключаманіпулятора 10 у напрямі до будь-якого із значущих положень М1, М2, ... першої координати. Введення Р другої координати може бути виконане нахилом ключа-маніпулятора 10 до будь-якого з безлічі значущих положень Р1, Р2, .... другої координати. Введення Р другої координати може бути виконане вибором будь-якого з натискних ключів 11, розташованих на ключі-маніпуляторі 10 і відповідних кожному значущому положенню Р1, Р2, .... другої координати. Введення М і/або Р може бути регістровим при двох або більш регістрах. Центральне введення S може бути виконаний за допомогою вибору центральної клавіші 13 введення, розташованої в центрі ключа-маніпулятора 10, і/або підйомом і опусканням ключаманіпулятора 10 щодо основи 110. Центральне введення S може бути регістровим при двох або більш регістрах. В цьому випадку нові дані, відмінні від початково привласнених кожному значущому положенню символу, можуть бути введені центрально-комбінованим введенням CM і СР, при якому центральне введення S виконується одночасно з введенням М першої координати або введенням Р другої координати. Координатно-комбіноване введення МР і РМ для введення третього символу, привласненого такій операції введення, може бути виконано за допомогою послідовного виконання введення по двох різних координатах. У кожному з вищезгаданих прикладів варіантів виконання на основі 110 можуть бути розташовані два або більш ключа-маніпулятора 10. Пристрій 1 введення символів, що заявляється, може додатково містити засіб для прийому і передачі даних, приєднаний до зовнішнього пристрою дротяним і/або бездротовим способом, з можливістю приєднання/від'єднання пристрою 1 введення символів до/від зовнішнього пристрою. У одному з варіантів реалізації запропонований пристрій 1 введення символів містить: - основу 110; - два ключі-маніпулятори 10, розташовані в основі 110 з можливістю виконання введення М і Р як регістрових при двох або більш регістрах, причому введення М виконується переміщенням 2 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 60 ключа-маніпулятора 10 від свого початкового положення S до будь-якого із значущих положень М1, М2, ..., першої координати, що рознесли по колу від початкового положення S, а введення Р другої координати виконується вибором будь-якого з чотирьох значущих положень Р1, Р2,..., другої координати, що рознесли по колу в самому ключі-маніпуляторі 10; - перший датчик 61 для зчитування введення М першої координати; - другий датчик 63 для зчитування введення Р другої координати; - і контролер 51 для витягання першого або другого символу з блоку 55 пам'яті, причому перший символ привласнений значущому положенню М1, М2, ..., першої координати, в якому зчитується переміщення ключа-маніпулятора 10, а другий символ привласнений значущому положенню Р1, Р2, …, другої координати, в якій зчитується введення Р другої координати. Згідно іншого варіанту реалізації пропонований пристрій 1 введення символів містить: - основу 110; - два ключі-маніпулятори 10, розташовані в основі 110 з можливістю виконання введення М і Р, причому введення М виконується переміщенням ключа-маніпулятора 10 від відповідного початкового положення S до будь-якого з восьми значущих положень М1, М2, ..., першої координати, що рознесли по колу від початкового положення S, а введення Р другої координати виконується вибором будь-якого з чотирьох значущих положень Р1, Р2,..., другої координати, що рознесли по колу в самому ключі-маніпуляторі 10; - перший датчик 61 для зчитування введення М першої координати; - другий датчик 63 для зчитування введення Р другої координати; - і контролер 51 для витягання першого або другого символу з блоку 55 пам'яті, причому перший символ привласнений значущому положенню М1, М2, ..., першої координати, в якому зчитується переміщення ключа-маніпулятора 10, а другий символ привласнений значущому положенню Р1, Р2, ..., другої координати, в якому зчитується введення Р другої координати. У ще одному варіанті реалізації пропонований пристрій 1 введення символів містить: - основу 110; - два ключі-маніпулятори 10, розташовані в основі 110 з можливістю виконання введення М і Р, причому введення М виконується переміщенням ключа-маніпулятора 10 від свого початкового положення S до будь-якого з чотирьох значущих положень М1, М2, ..., першої координати, що рознесли по колу від початкового положення S, а введення Р другої координати виконується вибором будь-якого з восьми значущих положень Р1, Р2, ..., другої координати, що рознесли по колу в самому ключі-маніпуляторі 10; - перший датчик 61 для зчитування введення М першої координати; - другий датчик 63 для зчитування введення Р другої координати; - і контролер 51 для витягання першого або другого символу з блоку 55 пам'яті, причому перший символ привласнений значущому положенню М1, М2, ..., першої координати, в якому зчитується переміщення ключа-маніпулятора 10, а другий символ привласнений значущому положенню Р1, Р2, ..., другої координати, в якому зчитується введення Р другої координати. В даному випадку введення М і/або Р можуть бути регістровими при двох або більш регістрах. У ще одному варіанті реалізації пропонований пристрій 1 введення символів містить: - основу 110; - ключ-маніпулятор 10, заміщений в основу 110 з можливістю незалежного введення М першої координати і введення Р другої координати, причому введення М виконується ковзанням ключа-маніпулятора 10 від початкового положення S до будь-якого з безлічі значущих положень М1, М2, ...,що рознесли по колу від початкового положення S в межах заданої області введення, а введення Р другої координати виконується вибором будь-якого з натискних ключів 11, розташованих у ключі-маніпуляторі 10 і відповідних множині значущих положень Р 1, Р2, ..., другої координати, що рознесли по колу в самому ключі-маніпуляторі 10; - перший датчик 61 для зчитування переміщення ключа-маніпулятора 10; - другий датчик 63 для зчитування вибору нажімного ключа 11; - і контролер 51 для витягання з блоку 55 пам'яті і введення першого символу, привласненого відповідному положенню першої координати і другого символу, привласненого відповідному положенню другої координати, на основі результатів зчитування першим датчиком 61 і другим датчиком 63. Згідно чергового варіанту реалізації запропонований пристрій 1 введення символів містить: - основу 110; - ключ-маніпулятор 10, заміщений у основу 110 з можливістю незалежного введення М першої координати і введення Р другої координати, причому введення М виконується ковзанням ключа-маніпулятора 10 від початкового положення S до будь-якого з безлічі значущих положень 3 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 60 М1, М2, ..., першої координати, що рознесли по колу від початкового положення S в межах заданої області введення, а введення Р другої координати виконується нахилом ключаманіпулятора 10 до будь-якого з безлічі значущих положень Р1, Р2, ..., другої координати, що рознесли по колу в самому ключі-маніпуляторі 10; - перший датчик 61 для зчитування переміщення ключа-маніпулятора 10; - другий датчик 63 для зчитування нахилу ключа-маніпулятора 10; - і контролер 51 для витягання з блоку 55 пам'яті і введення першого символу, привласненого відповідному положенню першої координати, другого символу, привласненого відповідному положенню другої координати, на основі результатів зчитування першим датчиком 61 і другим датчиком 63. У ще одному варіанті реалізації запропонований пристрій 1 введення символів містить: - основу 110; - ключ-маніпулятор 10, заміщений у основу 110 з можливістю незалежного введення М першої координати і введення Р другої координати, причому введення М виконується ковзанням ключа-маніпулятора 10 від початкового положення S до будь-якого з безлічі значущих положень М1, М2, ..., першої координати, що рознесли по колу від початкового положення S в межах заданої області введення, а введення Р другої координати виконується нахилом-ковзанням ключа-маніпулятора 10 повністю до будь-якого з безлічі значущих положень Р1, Р2, ..., другої координати, що рознесли по колу в самому ключі-маніпуляторі 10; - опору, розташовану між ключем-маніпулятором 10 і основою 110, що ковзає одночасно з ключем-маніпулятором 10 і що підтримує його рух нахилу-ковзання; - перший датчик 61 для зчитування переміщення ключа-маніпулятора 10; - другий датчик 63 для зчитування нахилу-ковзання ключа-маніпулятора 10; - і контролер 51 для витягання з блоку 55 пам'яті і введення першого символу, привласненого відповідному положенню першої координати, другого символу, привласненого відповідному положенню другої координати, на основі результатів зчитування першим датчиком 61 і другим датчиком 63. У черговому варіанті реалізації запропонований пристрій 1 введення символів містить: - основу 110; - ключ-маніпулятор 10, заміщений у основу 110 з можливістю незалежного введення М першої координати і введення Р другої координати, причому введення М виконується нахиломковзанням ключа-маніпулятора 10 в цілому від початкового положення S до будь-якого з безлічі значущих положень М1, М2, ..., першої координати, що рознесли по колу від початкового положення S, а введення Р другої координати виконується нахилом ключа-маніпулятора 10 у напрямі до будь-якого з безлічі значущих положень Р1, Р2,..., другої координати, що рознесли по колу в самому ключі-маніпуляторі 10; - опора, розташована між ключем-маніпулятором 10 і основою 110 і що підтримує його рух нахилу-ковзання; - перший датчик 61 для зчитування нахилу-ковзання ключа-маніпулятора 10; - другий датчик 63 для зчитування нахилу ключа-маніпулятора 10; - і контролер 51 для витягання з блоку 55 пам'яті і введення першого символу, привласненого відповідному положенню першої координати, другого символу, привласненого відповідному положенню другої координати, на основі результатів зчитування першим датчиком 61 і другим датчиком 63. Для досягнення вищезгаданої мети пропонується спосіб введення знаків пристроєм 1 з незалежним введенням М першої координати і введенням М другої координати, причому введення М виконується переміщенням ключа-маніпулятора 10 до будь-якого з безлічі значущих положень М1, М2,..., першої координати, що рознесли по колу з центром на початковому положенні S в межах заданої області введення, а введення Р другої координати виконується вибором будь-якого з безлічі значущих положень Р1, Р2, ..., другої координати, що рознесли по колу в самому ключі-маніпуляторі 10, причому спосіб передбачає наступні етапи: - збереження в блоці 55 пам'яті набору символів, в якому перші символи роздільно привласнені кожному значущому положенню М1, М2, ..., першої координати, а другі символи роздільно привласнені кожному значущому положенню Р1, Р2, ..., другої координати; - зчитування введення М і введення Р; - витягання першого символу або другого символу, відповідного деякому значущому положенню, з набору знаків на основі сигналу зчитування; - обробка і введення витягнутого першого або другого символу. Ці та інші сторони і переваги даного винаходу стануть зрозуміліші з нижченаведеного опису варіантів виконання, що розглядаються спільно з супровідними кресленнями. 4 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг.1 показує блок-схему пристрою введення символів, що заявляється. Фіг.2 показує в аксонометрії портативний переносний комунікатор, що містить пристрій введення символів, що заявляється. Фіг.3 показує в аксонометрії і в розрізі пристрій введення символів відповідно до одного з варіантів виконання даного винаходу. Фіг.4 ілюструє дію ключа-маніпулятора в операціях введення першої координати, другої координати і центрального введення відповідно до одного з варіантів виконання даного винаходу; Фіг.5 ілюструє радіальне переміщення ключа-маніпулятора і його окружний рух. Фіг.6 показує в аксонометрії і в розрізі пристрій введення символів відповідно до одного з варіантів виконання даного винаходу. Фіг.7 показує вигляд в розрізі основної частини пристрою введення символів, показаного Фіг.6. Фіг.8 показує в аксонометрії ключ-маніпулятор відповідно до ще одного варіанту виконання даного винаходу. Фіг.9 показує вигляд зверху, що ілюструє направляючий ключ-маніпулятор відповідно до одного з варіантів виконання даного винаходу. Фіг.10 показує вигляд в аксонометрії і вигляд в розрізі ключа-маніпулятора відповідно до різних варіантів виконання даного винаходу. Фіг.11 показує вигляд в аксонометрії ключа-маніпулятора відповідно до різних варіантів виконання даного винаходу; Фіг.12 ілюструє концепцію центрально-комбінованого введення в даному винаході. Фіг.13 ілюструє концепцію координатно-комбінованого введення і вид ключа-маніпулятора, що заявляється. Фіг.14 показує вигляд зверху опори як пояснення до введення обертальним рухом в даному винаході. Фіг.15 показує таблицю, в якій даний приклад призначення символів різних мов різним операціям введення в заявлений пристрій символів. Фіг.16-18 показують види основних частин пристрою введення символів відповідно до різних варіантів виконання даного винаходу. Фіг.19 показує в аксонометрії портативний термінал, в якому спарені ключі-маніпулятори, що заявляються, виконані справа і зліва. Фіг.20 є окремою ілюстрацією в аксонометрії варіанту реалізації, в якому заявлений пристрій введення знаків з'єднують/від'єднують до/від портативного терміналу. Фіг.21 і 22 ілюструють концепцію різних прикладів роботи з комбінованим введенням, коли заявлені ключі-маніпулятори, виконані в спареному варіанті. Фіг.23 показує вид основної частини, що ілюструє заявлений ключ-маніпулятор і пружну прокладку. Фіг.24 показує вигляд зверху на диск, розташований з можливістю обертання навколо заявленого ключа-маніпулятора. Фіг.25 ілюструє приклад, в якому символи вводяться за допомогою ключа-маніпулятора в пристрої введення символів відповідно до одного з варіантів виконання даного винаходу. Фіг.26-28 є робочими видами, що показують сполучні зв'язки між ключем-маніпулятором і основою відповідно до різних варіантів виконання даного винаходу. Фіг.29-33 показують види зверху клавіатурного індикатора відповідно до різних варіантів виконання даного винаходу. Фіг.34 показує блок-схему способу введення знаків відповідно до даного винаходу. Принцип роботи винаходу Далі приведено докладний опис конструкцій і варіантів виконання запропонованого пристрою 1 введення символів по операціях введення і з посиланням на супровідні креслення. Введення М першої координати У даній заявці введення М першої координати означає, що ключ-маніпулятор 10 переміщається до будь-якого з безлічі значущих положень М1, М2, , ..., першої координати, що рознесли по колу від початкового положення С, причому символи, що вводяться, привласнені кожному із значущих положень М1, М2,... першої координати. Фіг.3 показує сумісний вигляд в розрізі заявленого ключа-маніпулятора 10 і основи 110, показаних Фіг.2. Згідно цих фігур, початкове положення С (див. Фіг.2) знаходиться на стороні області 111 введення на основі 110. Безліч положень М1, М2, ... рознесені по колу від початкового положення С. 5 UA 97807 C2 5 10 15 20 25 У основі 110 є перший датчик 61 для зчитування переміщення ключа-маніпулятора 10, співвіднесеного з кожним із значущих положень М1, М2, ... першої координати. Відповідно, коли ключ-маніпулятор 10 переміщають від початкового положення С до будьякого із значущих положень М1, М2, ... першої координати, контролер 51 витягує з блоку 55 пам'яті перший символ, привласнений відповідному положенню М1, М2, ..., і вводить перший символ на основі сигналу першого датчика 61, який прочитує переміщення ключа-маніпулятора 10. Як перший датчик 61 можна застосовувати датчики різних типів. Тобто першим датчиком 61 може бути, наприклад, датчик тиску, оптичний або контактний датчик. Як варіант, першим датчиком 61 може бути, наприклад, сенсорна панель або сенсорний екран, виконані по всій області 111 введення і працюючі способом відстежування траєкторії. За необхідності може бути виконано різне число значущих положень М 1, М2, ... першої координати. Такою кількістю може бути вісім положень М1-M8, як показано на Фіг.3, однак їх може бути чотири або шість. Введення М першої координати може бути виконане різними способами. Наприклад, введення М може проводитися ковзанням або горизонтальним переміщенням (див. Фіг.4(b)) ключа-маніпулятора 10 від початкового положення С (див. Фіг.4(а)) до заданого положення Ms (див. Фіг.4(b)). Ковзання або горизонтальне переміщення не обмежується строго горизонтальним рухом щодо нижньої поверхні основи 110, але включає всі можливі кути і напрями від початкового положення С до значущих положень М1, М2, .... першої координати. В даному випадку ключманіпулятор 10 може виконувати введення М переміщенням в радіальному напрямі від початкового положення С, а також ковзанням уздовж кола від початкового положення С в межах області 111 введення, як показано Фіг.5(с). Фіг.5 ілюструє приклад, в якому виконується введення групи символів «높» алфавіту хангиль (один склад). Для введення «높» ключ-маніпулятор 10 переміщають ковзанням від початкового положення С до значущих положень М1, М2 ... першої координати, яким привласнений символ «ㄴ» (див. Фіг.5(b)), а потім по колу для введення символу «ㅍ» (див. Фіг.5(с)). 30 35 40 45 50 55 Введення Р другої координати і введення символу-голосної «ㅗ» розглянуте нижче. У вищезгаданому прикладі, коли ключ-маніпулятор 10 переміщають по колу, його переміщення реєструється безліччю перших датчиків 61. В цьому випадку контролер 51 розцінює як діючий тільки сигнал від того з перших датчиків 61, який реєструє переміщення ключа-маніпулятора 10 останнім. Наприклад, при поверненні ключа-маніпулятора 10 до початкового положення С, може формуватися сигнал відбою, тоді контролер 51 може визначити, що діє тільки сигнал зчитування від першого датчика 61, який одержаний безпосередньо перед сигналом відбою. Як варіант, коли при роботі ключа-маніпулятора 10 генеруються однотипні сигнали, контролер 51 може встановити, що діє тільки останній сигнал в послідовності однотипних сигналів зчитування. Тобто, коли в процесі окружного руху ключа-маніпулятора 10 формується безліч сигналів зчитування, М першої координати, що відносяться до введення, і послідовно, тобто без повернення до початкового положення С, реєструється центральне введення З або введення Р другої координати, що генерує сигнали іншого типу, діє тільки значення М першої координати, зчитуване безпосередньо перед надходженням сигналів центрального введення З або введення Р другої координати. У останньому випадку, не дивлячись на те, що при поверненні ключа-маніпулятора 10 до початкового положення С не формується сигнал відбою, можна розпізнати діючий сигнал серед безлічі сигналів зчитування. Як варіант, переміщення ключа-маніпулятора 10 по колу може використовуватися для введення різних функціональних команд. Наприклад, переміщення ключа-маніпулятора 10 по колу проти годинникової стрілки може розцінюватися як команда відміни, а переміщення ключаманіпулятора 10 по колу за годинниковою стрілкою може розцінюватися як команда пропуску. Далі, як показано на Фіг.4, між ключем-маніпулятором 10 і основою 110 може бути опора 25 для переміщення ключа-маніпулятора 10. З іншого боку, введення М може бути виконане нахилом ключа-маніпулятора 10 введення у напрямі будь-якого із значущих положень М1, М2 ... першої координати, як показано Фіг.10(b). В цьому випадку може додатково бути опора 25, яка підтримує ключ-маніпулятор 10 на заданій висоті над основою 110. 6 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 Принцип дії ключа-маніпулятора 10 при введенні М першої координати не обмежується вищезгаданими варіантами. Ключ-маніпулятор 10 може бути виконаний з матеріалу, що частково або повністю деформується зовнішнім тиском, так що деформація ключаманіпулятора 10 може бути зчитувана, як координата під час операції введення. Як варіант, для реєстрації переміщення пальця замість вищезгаданого ключа-маніпулятора 10 може використовуватися датчик, наприклад, сенсорна панель, або сенсорний екран, і таким чином можна виконувати введення М першої координати. Крім того, на основі 110 може додатково бути направляюча 40, яка направляє переміщення ключа-маніпулятора 10. Направляюча 40 допускає переміщення ключа-маніпулятора 10 в точному напрямі, який планує користувач, так що під час введення М першої координати виконується правильне введення без якої-небудь перешкоди. Направляюча 40 може бути різних типів. Наприклад, направляюча 40 може бути прямолінійною у вигляді паза певної форми на основі 110, причому направляюча проходить від початкового положення С до кожного із значущих положень М 1, М2, .... першої координати. Інший варіант показаний на Фіг.2, де на основі 110 виконано заглиблення у формі диска, відповідна область 111 введення, яка обмежує відстань переміщення ключа-маніпулятора 10 в радіальному напрямі і, в той же самий час, направляє рух ключа-маніпулятора 10 по колу. Інший варіант показаний на Фіг.9: направляюча може бути фігурним пазом, вигини якого відповідають кожному із значущих положень М1, М2 ... першої координати. В цьому випадку, ключ-маніпулятор 10 може бути виконаний у формі, що відповідає направляючій 40. Таким чином, як показано на Фіг.9(b), коли ключ-маніпулятор 10 виконує введення М першої координати, хоча користувач переміщає його в неточному напрямі, ключманіпулятор 10 може переміщатися до будь-якого із значущих положень М1, М2, .... першої координати по направляючій 40. Направляюча 40 може бути виконана з різних матеріалів, наприклад, з пружного матеріалу. Далі, введення М першої координати може виконуватися як регістровий при двох або більше регістрах, залежно від різниці в дистанції переміщення ключа-маніпулятора 10 або сили натиснення при його переміщення. Тобто, як показано на Фіг.3, у випадку, якщо введення М першої координати виконується горизонтальним переміщенням (або ковзанням) ключа-маніпулятора 10, на траєкторії переміщення ключа-маніпулятора 10 від початкового положення С до кожного із значущих положень М1, М2, ... першої координати можуть бути виконані два або більш перших датчика 61. Як варіант, в ключі-маніпуляторі 10 або в пружній підкладці 21, розташованої під ключемманіпулятором 10, можуть бути додатково виконані контактні виступи 27а і 27b, які виступають на різну довжину у напрямі першого датчика 61. Згідно Фіг.6 і 7(с), по ободу пружної підкладки 21, розташованої під ключем-маніпулятором 10, є перший, порівняно довгий, контактний виступ 27а і другий, порівняно короткий, контактний виступ 27b, а на стороні основи 110, у відповідному порядку, розташовані перші датчики 61а і 61b з можливістю торкання відповідних контактних виступів 27а і 27b. Таким чином, коли ключ-маніпулятор 10 рухається в деякому напрямі на відстань першого регістра, спочатку перший контактний виступ 27а входить в контакт з першим датчиком 61а, а потім, коли ключ-маніпулятор 10 просувається на відстань другого регістра, другий контактний виступ 27b входить в контакт з першим датчиком 61b. Як показано на Фіг.7(с), перші контактні виступи 27а і другі контактні виступи 27b можуть бути розташовані з чергуванням за ключем-маніпулятором 10 або ободом пружної підкладки 21. Пружна підкладка 21 містить провідний матеріал і приєднана до виведення 64 загальної шини центрального процесора (ЦП), так що контактні виступи 27а і 27b мають потенціал загальної шини. Як варіант, у випадку, коли введення М першої координати проводиться нахилом ключаманіпулятора 10, для зчитування відхилення ключа-маніпулятора 10 або опори 25, залежно від кута нахилу, може бути передбачений один або більше оптичних датчиків. Спосіб застосування першого датчика 61 для розпізнавання і зчитування регістрового введення не обмежується вищезгаданими прикладами і може мати різні варіації. Далі приведено опис прикладу способу обробки сигналу контролером 51 у разі регістрового введення. Наприклад, коли виконується введення М першої координати в другому регістрі, спочатку виконується введення першого регістра. Далі, після виконання введення М в першому регістрі, контролер 51 чекає виконання введення М в другому регістрі в межах заданого часу, щоб розпізнати, чи проводиться введення в другому регістрі. 7 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Коли виконується введення М в першому регістрі, переважно, щоб контролер 51 обробляв таке введення без очікування. Однак, якщо введення в другому регістрі відбувається в межах часу очікування, контролер 51 може відмінити введення першого регістра і перетворити його у введення другого регістра. Таким чином, запобігає затримці введення протягом часу очікування. Як варіант, контролер 51 може використовувати зміну першої координати (наприклад, повернення ключа-маніпулятора 10 в початкове положення С після виконання введення М першої координати, або припинення сигналу введення першого регістра) як умову завершення введення першого регістра замість закінчення заданого часу очікування. Тобто, при завершенні операції введення першого регістра введення вважається остаточним. Відповідно, введення першого регістра обробляється негайно, а при завершенні операції введення вважається остаточним. Однак, безвідносно до часу очікування, якщо операція введення першого регістра виконується безперервно в одному положенні, проводиться введення другого регістра. В цьому випадку введення першого регістра відміняється і замінюється на введення другого. У вищезгаданому способі обробки сигналів, якщо введення першого регістра під час операції введення другого регістра було помилковим, після відміни введення першого регістра негайно виконується введення другого регістра з положення для введення першого регістра, без необхідності виконання послідовного введення двох регістрів, так що введення першого регістра замінюється на введення другого регістра, що прискорює операцію введення. Як було викладено вище, коли зчитується будь-який сигнал введення, він обробляється негайно, але введення вважається остаточним тільки тоді, коли операція введення закінчується. В цьому випадку, якщо введення М або Р виконане невірно, помилкове введення може бути виправлене на бажане до визнання введення остаточним, без повторного виконання введення після стирання обробленого введення, що спрощує введення. Як варіант, як перший датчик 61 або другий датчик 63 використовується датчик тиску, остаточне введення визначається на основі максимального тиску, що створюється в межах часу очікування. Або ж перший і другий регістр можна розрізняти за часом, протягом якого перший датчик 61 одержує сигнал від ключа-маніпулятора 10. Наприклад, якщо тривалість сигналу складає менше 0,5с. введення може розпізнаватися як перший регістр, а якщо тривалість сигналу складає більше 0,5с. введення може розпізнаватися як другий регістр. Як описано вище, навіть у разі використання датчика тиску, введення першого регістра обробляється негайно, і після закінчення операції введення він вважається остаточним, але якщо до завершення введення першого регістра додатково зчитується значення, відповідне введенню другого регістра, введення першого регістра відміняється і остаточним вважається введення другого регістра. Описана вище робота з сигналами контролера 51 при регістровому введенні, крім введення М, може застосовуватися таким самим способом при введенні Р, центральному введенні С, комбінованих введеннях МР і РМ, а також при центрально-комбінованому введенні CM і СР. З вищеописаного виходить, що при регістровому введенні М першої координати кількість символів (або кількість символів, які можна ввести за допомогою першої координати), що призначаються, пропорційно зростає. Отже, якщо потрібно вводити безліч символів введенням М першої координати, такі символи можуть вводитися в різних регістрах при розумному числі значущих положень М1, М2, .... першої координати. В результаті можна створити оптимальні умови для введення належним вибором числа значущих положень М 1, М2,... першої координати і числа регістрів. При одночасному занятті двох значущих положень М1, М2, .... під час введення М першої координати, наприклад, коли ключ-маніпулятор 10 переміщений в проміжне положення між двома значущими положеннями М1, М2, і таке переміщення ключа-маніпулятора 10 одночасно зчитується двома першими датчиками 61, між сигналами введення можуть виникнути взаємні перешкоди. В цьому випадку контролер 51 може розцінювати, що дієтільки перший з безлічі поступивших сигналів зчитування. Тобто, перший сигнал введення насправді обробляється і вводиться, тоді як інші поступивши сигнали в межах заданого часу або до припинення задачі першого сигналу (наприклад, до того, як ключ-маніпулятор завершує введення першої координати і повертається в початкове положення), ігноруються. Як варіант, всі значення сигналів, які можуть бути зчитані із взаємними перешкодами, можуть бути збережені і оброблені. Наприклад, коли сигнали зчитування поступають з перших 8 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 60 датчиків 61, яких може бути один, два або три в декількох положень, значення сигналів зберігаються для висновку і обробки відповідних даних при прочитуванні будь-яких сигналів. Якщо перший датчик 61 є датчиком тиску, вважається, що діє тільки сигнал з області максимального тиску. Ключ-маніпулятор 10 може мати різні форми. Наприклад, він може мати форму диска, як показано на Фіг.2, однак, він може мати багатокутну форму, або форму з виступами у бік кожного із значущих положень М1, М2, .... першої координати, як показано на Фіг.9. У варіанті, показаному на Фіг.9(с), за наявності чотирьох значущих положень P1, P2 ... другої координати, ключ-маніпулятор 10 може мати хрестоподібну форму. В цьому випадку, на верхній поверхні ключа-маніпулятора 10 може бути виступаюча частина 52а у формі кнопки для кожного із значущих положень P1, P2, ... другої координати. Ключ-маніпулятор 10 бути виконаний з різних матеріалів, наприклад, з пружного матеріалу. При введенні М першої координати область переміщення ключа-маніпулятора 10 не обмежується. Переважно, як показано на Фіг.25, ключ-маніпулятор 10 має можливість руху в межах досяжності накладених на нього пальців. Як показано на Фіг.11(а), на верхній поверхні ключа-маніпулятора 10 може бути засіб 54 проти ковзання, що перешкоджає зісковзуванню пальця, що стосується ключа-маніпулятора 10 при введенні М першої координати. Засіб 54 проти ковзання може бути різних типів. Наприклад, засіб 54 може бути виконаний у формі виступів і заглиблень на верхній поверхні ключа-маніпулятора 10, або угнутості у середині ключа-маніпулятора 10, або у формі комбінації вищезазначених виступів, заглиблень і угнутості. Альтернативно, як показано на Фіг.11(b) або 11(с), для полегшення роботи пальцями з ключем-маніпулятором 10 введення при введенні Р другої координати, можуть бути виконані виступи 52b і 52с з боку верхнього торця ключа-маніпулятора 10. З іншого боку, як показано на Фіг.11(d), для полегшення роботи з ключем-маніпулятором 10 при введенні М першої координати або введенні Р другої координати, ключ-маніпулятор 10 введення може додатково мати виступ 53 посеред верхньої поверхні ключа-маніпулятора 10. Виступ 53 служить для полегшення введення, коли пристрій 1 введення символів, що заявляється, розташований і використовується на столі або іншій поверхні, або коли разом з великим пальцем використовуються вказівний або середній палець. Виступ 53 може мати різні форми. Наприклад, виступ 53 може мати форму кільця, як показано на Фіг.11(d), а також опуклу або увігнуту форму. В цьому випадку ключ-маніпулятор 10 комплектують стрижнем 56, один кінець якого вставляють в з'єднувач 57 виступу 53. Тобто, з ключем-маніпулятором 10 можна працювати за допомогою стрижня 56, вставленого у виступ 53. Введення Р другої координати У даній заявці введення Р другої координати означає, що вибирається будь-яке з безлічі значущих положень P1, P2, ...., другої координати, які рознесли по колу в самому ключіманіпуляторі 10, і при цьому вводиться другий символ, привласнений відповідному значущому положенню P1, P2..... Тобто, введення М першої координати виконується переміщенням ключа-маніпулятора 10 цілком до значущих положень М, М2, ...., розташованих поза ключем-маніпулятором 10, а введення Р другої координати виконується без горизонтального переміщення (або ковзання) або нахилу-ковзання ключа-маніпулятора 10 цілком, але за допомогою вибору значущих положень P1, P2, ...., розташованих в самому ключі-маніпуляторі 10. Введення Р другої координати може виконуватися різними способами. Наприклад, як показано на Фіг.4(с), введення Р може виконуватися нахилом ключа-маніпулятора 10 до будьякого із значущих положень P1, P2 .... В цьому випадку пристрій введення символів може додатково містити опору 25, що підтримує ключ-маніпулятор 10, який може бути нахилений від початкового горизонтального стану у напрямі будь-якої ділянки. У варіанті, показаному на Фіг.5, введення Р другої координати може виконуватися виборчим натисненням будь-якого з натискних ключів 11, виконаних в ключі-маніпуляторі 10 і відповідних значущим положенням P1, P2, .... другої координати. Натискний ключ 11 може мати будь-яку форму, яка не має нахилу ключа-маніпулятора 10, але надає можливість незалежного вибору кожного із значущих положень P1, P2 ... у ключіманіпуляторі 10. Наприклад, натискний ключ 11 може бути окремою натискною кнопкою або перемикачем в ключі-маніпуляторі 10 для кожного з положень P1, P2..... Інакше, натискний ключ 11 може бути 9 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 60 натискним перемикачем, для другого датчика 63 на верхньому торці або усередині ключаманіпулятора 10 для кожного із значущих положень P1, P2, ... другої координати. Тим часом, введення Р другої координати може проводитися окружним рухом, як і введення М першої координати. Функція введення і обробка сигналу при окружному введенні такі ж самі, що використовуються при введенні М першої координати. Ключ-маніпулятор 10 може мати різні розміри. Як показано на Фіг.25, якщо натискний ключ 11 виконаний на верхньому торці ключа-маніпулятора 10, то бажано, щоб ключ-маніпулятор 10 мав розмір, що допускає вибір кожного з натискних ключів 11 поміщеними на ключ-маніпулятор 10 пальцями. Так само, навіть коли введення Р другої координати виконується нахилом ключаманіпулятора 10, бажано, щоб він мав розмір, що дозволяє нахиляти його до кожного з положень P1, P2 ... за допомогою нахилу єдиного пальця, що стосується ключа-маніпулятора 10. Залежно від способу виконання введення Р другої координати можуть застосовуватися різні інші датчики 63. Наприклад, якщо введення Р виконується нахилом ключа-маніпулятора 10, на його нижньому ободі можуть бути виконані пороги, що послідовно входять в контакт з основою 110 у міру нахилу ключа-маніпулятора 10. В цьому випадку, другий датчик 63 може бути виконаний як контактний датчик, призначений для виявлення контакту між ключем-маніпулятором 10 і основою 110, або як оптичний датчик, призначений для виявлення нахилу ключа-маніпулятора 10, причому контактний датчик або оптичний датчик можуть бути виконані на порогах основи 110. Як варіант, при виконанні введення Р натискними ключами 11, розташованими в ключіманіпуляторі 10, другий датчик 63 може бути виконаний у вигляді контактного датчика, натискного перемикача або датчика тиску на нижній стороні кожного з натискних ключів 11. Тим часом, введення Р другої координати може бути регістровим при двох або більш регістрах. Наприклад, введення Р може розрізняти регістри по куту нахилу ключа-маніпулятора 10, різниці в силі натиснення або глибині натиснення ключа 11. Як показано на Фіг.4(е), якщо введення Р має два регістри, наприклад, по нижньому ободу ключа-маніпулятора 10 виконуються східце, при цьому нижній другий датчик 63 входить в контакт з основою 110 при нахилі першого регістра, а верхній другий датчик 63 входить в контакт з основою 110 при нахилі другого регістра. У варіанті, показаному на Фіг.7(а), в пружній підкладці 21, розташованої під ключемманіпулятором 10, або в самому ключі-маніпуляторі 10 може бути виконаний третій контактний виступ 27с або четвертий контактний виступ 27d, які виступають на різну довжину у напрямі датчиків 63а і 63b. В цьому випадку, у міру нахилу ключа-маніпулятора 10, спочатку третій, порівняно довгий, контактний виступ 27с входить в контакт з другим датчиком 63а, а потім четвертий контактний виступ 27d входить в контакт з другим датчиком 63b для введення другого регістра. Контактні виступи 27а і 27b можуть бути виконані з пружних провідних матеріалів. Що стосується обробки сигналу контролером 51 при регістровому введенні Р другої координати, аналогічним чином може бути використаний вищеописаний спосіб введення М першої координати. Тим часом, можливо використання сенсорного введення, при якому розпізнається наближення або торкання значущих положень P1, P2, .... другої координати для введення різних символів, привласнених з накладенням відповідним значущим положенням P1, P2,. В цьому випадку, як показано на Фіг.8, у верхнього торця ключа-маніпулятора 10 або у кожного з натискних ключів 11, відповідних кожному із значущих положень P1, P2,.... може бути виконаний сенсорний датчик 67. Наприклад, на Фіг.8 показано, що символ «А» вводиться торканням певного значущого положення Р2 другої координати, а символ «В» вводиться нахилом ключа-маніпулятора 10 введення до відповідного положення. Таким чином, можна збільшити кількість символів, які можуть бути привласнені значущим положенням P1, P2, .... за допомогою сенсорного введення. Далі, при регістровому введенні Р другої координати можливо привласнення ще більшого числа символів. Число значущих положень М1, М2, .... першої координати і значущих положень P1, P2,.... другої координати може бути, наприклад, в межах від чотирьох до дванадцяти. Бажано, щоб число значущих положень М1, М2, .... першої координати і значущих положень P1, P2, .... другої координати не перевищувало восьми. Це обумовлено тим, що якщо користувач пальцями може переміщати ключ-маніпулятор в більш, ніж восьми напрямах, точність введення може погіршуватися через малі відстані між значущими положеннями відповідної координати. 10 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 В цьому випадку, відносно недостатньої кількості значущих положень можливо сумісне використання центрального введення С, який описаний нижче, або спарені ключі-маніпулятори 10 можуть бути розташовані справа і зліва, так, щоб розмістити всі необхідні символи і досягти оптимальних умов введення. Крім того, кількість значущих положень М1, М2, ... першої координати і значущих положень P1, P2, .... другої координати може бути однаковою або відрізнятися одне від іншого. Варіанти комбінованого введення М першої координати і введення Р другої координати Далі описані приблизні варіанти комбінування введення М першої координати і введення Р другої координати в пристрої введення символів, що заявляється. У першому варіанті введення М першої координати виконується ковзанням ключаманіпулятора 10 від початкового положення С до значущих положень М1, М2, .... першої координати, а введення Р другої координати виконується вибором натискного ключа 11, розташованого на верхньому торці ключа-маніпулятора 10, відповідно до кожного із значущих положень P1, P2... другої координати, як показано на Фіг.3. В цьому випадку перший датчик 61 для зчитування введення М першої координати може бути виконаний на основі 110 під ключем-маніпулятором 10, як показано на Фіг.3, або на основі 110 на ободі ключа-маніпулятора 10, як показано на Фіг.4(а) і 4(b). Як показано на Фіг.10(а), введення Р другої координати може бути виконане за допомогою контактних виступів 27с і 27b, розташованих на нижній частині ключа-маніпулятора 10, при натисненні ключа 11 для введення цих виступів в контакт з другим датчиком 63. В цьому випадку, контактні виступи 27с і 27d мають різну довжину, так що третій контактний виступ 27с входить в контакт при введенні Р першого регістра, а четвертий контактний виступ 27d входить в контакт при введенні Р другого регістра. При цьому, п'ятий контактний виступ 27е, що входить в контакт з третім датчиком 65 а при центральному введенні С в першому регістрі, і шостий контактний виступ 27f, що входить в контакт з третім датчиком 65b при центральному введенні С в другому регістрі, виступають вниз на різну довжину з клавіші 13 центрального введення. Далі, зовнішній обід ключа-маніпулятора 10 має поворотний орган 58 з пружного матеріалу для повернення ключа-маніпулятора 10 в початкове положення С після виконання введення М першої координати. Фіг.6 і 7 показують запропонований пристрій 1 введення символів відповідно до другого варіанту виконання даного винаходу. Згідно цим кресленням, введення М першої координати виконується ковзанням ключа-маніпулятора 10 від початкового положення С до значущих положень М1, М2 ... першої координати, а введення Р другої координати виконується нахилом ключа-маніпулятора 10 від горизонтального положення до будь-якого з положень P1, P2... другої координати. Як показано на Фіг.7(с), введення М виконується контактними виступами 27а і 27b, виступаючими з ключа-маніпулятора 10 або обода пружної підкладки 21, при цьому в основі 110 знаходяться перші датчики 61а і 61b, що відповідають контактним виступам 27а і 27b. Як описано вище, регістрове введення при двох або більш регістрах може бути виконане завдяки різній довжині контактних виступів 27а і 27b. Пристрій 1 введення символів може додатково містити опору 25, що підтримує ключманіпулятор 10, який може бути встановлений з можливістю нахилу для виконання введення Р другої координати. Опора 25 може бути різних типів. Також може застосовуватися опора 25', виконана з можливістю ковзання спільно з ключем-маніпулятором 10. З іншого боку, як показано на Фіг.7(b), знизу ключа-маніпулятора 10 є поворотний орган 58, який повертає ключ-маніпулятор 10 до початкового положення після виконання введення Р другої координати. Поворотний орган 58 розташований на пружній підкладці 21 (або на ключі-маніпуляторі 10) і основі 113 друкарської плати так, щоб забезпечити як ковзання, так і нахил ключа-маніпулятора 10. Як варіант, сам ключ-маніпулятор 10 може бути виконаний з пружного матеріалу, без опори 25, або між ключем-маніпулятором 10 і основою 110 може бути поміщений пружний матеріал, що деформується, який забезпечує можливість нахилу ключа-маніпулятора 10. В цьому випадку, не дивлячись на те, що ключ-маніпулятор 10 виконує введення Р другої координати в деякому направленні з того положення, в якому було завершене введення М першої координати в деякому напрямі, другі датчики 63а і 63Ь мають подану форму і розмір (площа) такі, щоб прочитувати його контактними виступами 27с і 27d. 11 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 Фіг.10(с) показує інший приклад відповідно до приблизного варіанту виконання даного винаходу. Згідно Фіг.10(с), між ключем-маніпулятором 10 і основою 110 може бути поміщена пружна прокладка 40, що створює простір для натиску, а датчики 61, 63 і 65 можуть бути виконані знизу пружної прокладки 40. В цьому випадку, на внутрішній стороні пружної прокладки 40 можуть бути виконані контактні виступи 27а, 27b, 27c, 27d і 27f, виступаючі на різну довжину у бік відповідних датчиків 61, 63, 65, що дає можливість регістрового введення. Між контактними виступами 27а, 27b і пружною прокладкою 40 поміщений провідник 23. Один кінець провідника 23 приєднаний до роз'єму 64 загальної шини, а інший кінець приєднаний до контактних виступів 27а-27f, так що сигнал зчитування передається контролеру 60 через контактні виступи 27а-27f. Наприклад, коли виконується введення М1 першого регістра, зовнішній контактний виступ 27а стосується металевого зведення 58 і породжує сигнал введення координати в першому регістрі. При цьому, оскільки контактний виступ 27а стосується краю металевого зведення 24, останній зберігає свою первинну форму. Далі, коли виконується введення М2 другого регістра, внутрішній контактний виступ 27b опускається і деформує металеве зведення 24, щоб торкнутися першого датчика 61b, внаслідок чого породжується сигнал введення координати другого регістра. В процесі деформації металевого зведення 24 можна проводити тактильну імітацію клацання, щоб користувач міг легко розрізняти введення першого і другого регістра. У запропонованому пристрої 1 введення символів згідно третього варіанту виконання введення М першої координати виконується ковзанням ключа-маніпулятора 10 від початкового положення С до значущих положень М1, М2, .... першої координати, а введення Р другої координати виконується нахилом-ковзанням ключа-маніпулятора 10 до значущих положень P1, P2,.... другої координати. Термін «нахил-ковзання» означає, що ключ-маніпулятор 10 як ціле нахиляють і переміщають (разом з опорою 25) до заданого напряму, як показано зліва на Фіг.10(b). Однак, термін «нахил» означає, що ключ-маніпулятор 10 нахиляють щодо опори 25, як показано справа на Фіг.10(b). Як показано на Фіг.8, введення М першої координати може бути виконане ковзанням ключаманіпулятора 10, а введення Р другої координати може бути виконане нахилом ключаманіпулятора 10, хоча не у вказаному вище визначенні нахилу-ковзання. Як варіант, введення М першої координати виконується ковзанням, введення Р другої координати виконується нахилом-ковзанням, і додатково ключ-маніпулятор 10 встановлений з можливістю нахилу в його поточному положенні. У кожному з вищезгаданих приблизних варіантів виконання ключ-маніпулятор 10 може бути поміщений в основі 110, при цьому виступаючи з нього. Таким чином, розміщення ключа-маніпулятора 10 в основі 110 дозволяє зменшити розміри, а виступаюче назовні положення ключа-маніпулятора 10 спрощує роботу з ним. Фіг.10(b) ілюструє пристрій 1 введення символів згідно четвертому варіанту виконання даного винаходу. Відповідно до Фіг.10(b), введення М першої координати виконується нахилом-ковзанням ключа-маніпулятора 10 (див. зліва на Фіг.10(b)), а введення Р другої координати виконується нахилом вниз ключа-маніпулятора 10 (див. справа на Фіг.10(b)). Ключ-маніпулятор 10 підтримується опорою 25, що містить пружний матеріал, що дозволяє нахил ключа-маніпулятора 10 до кожного із значущих положень М1, М2 ... першої координати. Обід ключа-маніпулятора 10 стосується першого датчика 61, розташованого біля основи 110, коли проводять нахил-ковзання ключа-маніпулятора 10. Другий датчик 63, що прочитує введення Р другої координати нахилом ключа-маніпулятора 10, розташований на основі 113 друкарської платні (РСВ), що відповідає нижній частині ключаманіпулятора 10. У кожному з вищезгаданих приблизних варіантів виконання введення М першої координати або введення Р другої координати можуть мати однакове або різне число значущих положень. Далі, введення першої координати М і/або введення Р другої координати можуть бути регістровими. Наприклад, введення М першої координати може мати єдиний регістр, а введення Р другої координати може мати два регістри. В цьому випадку, символи-приголосні можуть бути введені як друга координата Р, а символи-голосні можуть бути введені як перша координата М. 12 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 Це обумовлено тим, що в більшості національних алфавітів кількість і частота використання символів-приголосних дещо перевищує кількість і частоту використання символів-голосних, і при цьому введення Р другої координати порівняно легше за введення М першої координати при декількох регістрах введення. Як було викладено вище, запропонований пристрій 1 введення символів дозволяє швидко і точно вводити символи комбінуванням введення М першої координати і введення Р другої координати, моторика введення яких різна. Це обумовлено можливістю введення символів за допомогою розрізнення приголосних і голосних залежно від операції введення при введенні майже всіх національних алфавітів, для яких характерний чергування голосних і приголосних. Крім того, оскільки введення М першої координати і введення Р другої координати не зв'язані якими-небудь обмеженнями (такими, наприклад, як для виконання якої-небудь операції введення повинна бути виконана інша операція введення і т.д.) між відповідними операціями введення, безліч операцій введення виконуються безперервно як одна операція. Згідно Фіг.25 нижче приведений приклад введення з використанням пропонованого пристрою 1 введення символів. Коли користувачу необхідно ввести букви «CAR», він може провести нахил ключа-маніпулятора 10 до положення Р7 (або вибрати натискний ключ 11), якому привласнена приголосна «С», а потім перемістити ключ-маніпулятор 10 до положення М1, якому привласнена голосна «А». Потім користувач знову нахиляє ключ-маніпулятор 10 до положення Р2, якому привласнена приголосна «R». Оскільки ці три операції можуть виконуватися одночасно або послідовно з невеликим інтервалом, дане слово з декількох знаків може бути введено, практично, однією безперервною операцією. У кожному з описаних вище варіантів виконання розглядається основна форма, що комбінує введення М першої координати і введення Р другої координати в пропонованому пристрої 1 введення символів. Однак, можливі додаткові комбінації різних конфігурацій без обмеження відносно іншої форми, розміру, матеріалу і т.д. кожної конфігурації. Далі детально розглянуті додаткові конфігурації і різні видозмінені приклади, які можуть бути включені у вищезгадану основну форму. Кожна з описаних нижче конфігурацій може бути використана самостійно, або дві або більше конфігурації можуть бути використані одночасно. В цьому випадку можливі різні комбінації. Центральне введення С У даній заявці під центральним введенням С розуміється введення, виконане за допомогою центральної клавіші 13 введення, розташованої в центрі ключа-маніпулятора 10, або переміщенням самого ключа-маніпулятора 10 вгору і вниз, на відміну від введення М першої координати або введення Р другої координати. Наприклад, як показано на Фіг.3, центральне введення С може бути проведене центральною клавішею 13 введення, виконаною з можливістю вибору в центрі ключаманіпулятора 10, і третім датчиком 65, призначеним для зчитування вибору центральної клавіші 13. У варіанті на Фіг.4(d) центральне введення С виконується переміщенням ключаманіпулятора 10 цілком вгору і вниз щодо основи 110, при цьому переміщення вгору і вниз ключа-маніпулятора 10 може бути зареєстроване як в ключі-маніпуляторі 10, так і в основі ПО. Центральне введення С може бути виконане в обох або в будь-якій з вищеописаних форм. З іншого боку, центральне введення С може бути регістровим, тобто мати два або більш регістра, залежно від глибини або сили натиснення центральної клавіші 13, або глибини опускання і підйому самого ключа-маніпулятора 10. Сенсорне введення інших символів, привласнених з накладенням центральній клавіші 13, може бути виконане зчитуванням наближення до центральної клавіші 13 або дотики до неї. В цьому випадку центральна клавіша 18 введення забезпечена центральним сенсорним датчиком 61а, призначеним для зчитування наближення пальця або його торкання. У разі наявності датчика 61а, коли торкання пальця реєструється датчиком 69 центральної клавіші введення протягом заданого часу, контролер 51 може ігнорувати сигнал сенсорного датчика 67, дозволяючи, таким чином, не проводити сенсорне введення. Центрально-комбіноване введення CM і СР У даній заявці під центрально-комбінованим введенням CM і СР розуміється виконання центрального введення С одночасно з введенням М першої координати або введенням Р другої координати. Наприклад, в процесі введення М першої координати, як показано на Фіг.4(b), ключманіпулятор 10 переміщають до деяких положень М1, М2 ... при натиснутій центральній клавіші 13 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 13, яка показана Фіг.3, або в процесі введення Р другої координати, як показано на Фіг.4(с), проводять нахил ключа-маніпулятора 10 до деяких положень P1, P2…при натиснутій клавіші 13. Фіг.12 ілюструє концепцію центрально-комбінованого введення CM і СР. Далі приведений приклад комбінування введення М першої координати і центрального введення застосовується і до Фіг.12. Коли виконують введення С в процесі переміщення ключаманіпулятора 10 до деякого значущого положення М1 першої координати, має місце комбіноване введення CM1. Однак, при переміщенні тільки ключа-маніпулятора 10 без виконання введення С проводять введення М1 першої координати. Центрально-комбіноване введення CM і СР також може бути використане для випадку, при якому щонайменше один з введення М, введення Р і центрального введення С має два або більш регістра. Наприклад, як показано на Фіг.17, коли введення М першої координати має два регістри, можуть бути виконані: - центрально-комбіноване введення CM11 першого регістра, в якому скомбіновані введення М11 першого регістра і центральне введення С, - і центрально-комбіноване введення СМ22 другого регістра, в якому скомбіновані введення М21 другого регістра і центральне введення С. У іншому випадку, як показано на Фіг.18, введення М першої координати має один регістр, а центральне введення С1 і С2 має два можливі регістри: - центрально-комбіноване введення С1М11 першого регістра, в якому скомбіновані введення М1 і центральне введення С1 першого регістра, - і центрально-комбіноване введення С2М11 другого регістра, в якому скомбіновані введення Мі і центральне введення С2 другого регістра. Відповідно, якщо можуть бути виконані центрально-комбіновані введення CM і СР, то символи можуть бути привласнені з накладенням положенням М1, М2 ... і положенням P1, P2, місткість введення (кількість символів, які можуть бути введені) зростає без наявності якихнебудь додаткових конфігурацій. Природно, що у вищезгаданих двох випадках центрально-комбіноване введення CM і СР, замість введення М першої координати, може поєднуватися з введенням Р другої координати. Тобто, центрально-комбіноване введення CM і СР може бути виконане поєднанням введення М першої координати і введення Р другої координати у всіх вищезгаданих формах з центральним введенням С у всіх вищезгаданих формах, без обмеження. Координатно-комбіноване введення МР і РМ У даній заявці під координатно-комбінованим введенням МР і РМ розуміється таке введення, при якому спочатку вводять будь-яку з координат М і Р, а потім іншу координату, і при цьому в пристрій вводиться третій символ, привласнений такій операції введення. Тобто, координатно-комбіноване введення МР і РМ означає, що за ситуації, коли спочатку виконують введення М першої координати, як показано Фіг.4(b), тобто ключ-маніпулятор 10 введення переміщають до значущих положень М1, М2 ... першої координати, введення Р виконують як показано Фіг.4(с), і навпаки. Фіг.13 ілюструє концепцію координатно-комбінованого введення МР і РМ. Фіг.13(а) показує випадок, коли введення Р виконують після введення М, виконаного першим. Координатно-комбіноване введення М1Р1 означає, що введення Р другої координати виконують до значущого положення Р1 другої координати із стану, коли ключ-маніпулятор 10 переміщений до значущого положення М1 першої координати. Навпаки, Фіг.13(b) показує, що введення М першої координати виконують із стану, коли спочатку виконане введення Р другої координати. Комбіноване введення Р 1М1 означає, що введення М першої координати виконують до значущого положення М 1 першої координати із стану, коли введення Р виконане до значущого положення Р1 другої координати. Коли введення М виконують після введення Р, виконаного першим, перший датчик 61 може бути розташований навколо другого датчика 63, що відповідає кожному з натискних ключів 11, як показано Фіг.14(с). Значущі положення М1, М2... першої координати і значущі положення P1, P2 ...другої координати можуть бути скомбіновані по всіх координатах. Тобто, як показано Фіг.13(а), якщо введення Р виконується до значущого положення Р4 другої координати із стану, коли ключ-маніпулятор переміщений до значущого положення М2 другої координати, виконується комбіноване введення М2Р4. Як викладено вище, при координатно-комбінованих введеннях М1Р1 і Р1М1 можливе введення різних символів залежно від порядку введення координат, що підлягають 14 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 комбінуванню, однак, можливе введення одного і того ж символу незалежно від порядку комбінування. Тобто, ті ж самі символи можуть бути введені за допомогою координатно-комбінованого введення М1Р1 і координатно-комбінованого введення Р1М1. Тим часом, якщо координатно-комбіноване введення МР і РМ не реалізоване, навіть не дивлячись на те, що введення Р і введення М виконуються одночасно, кожне введення проводиться незалежно від іншого. Тобто, у варіанті виконання на Фіг.5, коли введення Р другої координати, відповідне символу «ㅗ», і введення М першої координати, відповідне символу «ㄴ» , виконані одночасно, буде проведене введення символу хангиль «노», а не нового комбінованого символу. З іншого боку, коли хоч би по одній з координат М і Р є регістрове введення при двох або більш регістрах, число комбінацій координатно-комбінованого введення МР і РМ відповідним чином зростає, що підвищує місткість введення. Тому бажано, щоб введення символів, що належать до алфавітів з п’ятдесяти і більш фонем, наприклад, символів китайської або японської мови, виконувався координатнокомбінованим введенням МР і РМ. Відмітимо, що вищезгадані центральне введення С, центрально-комбіноване введення CM і координатно-комбіноване введення МР і РМ, за необхідності, можуть вільно поєднуватися з введенням М і введенням Р, а число значущих положень кожної координати може бути довільно змінено. Обертальне введення R У даній заявці під обертальним введенням R розуміється введення призначених символів або даних обертанням управо і вліво самого ключа-маніпулятора 10 з центром на початковому положенні на основі 110. Обертання ключа-маніпулятора 10 може бути реалізоване різними способами. Наприклад, як показано Фіг.14(а), опора 25 може бути розділена на першу опору 25а і другу опору 25b з можливістю руху один відносно одного. Перша опора 25а може бути закріплена, а друга опора 25b може обертатися у напрямі першої опори 25а, і навпаки. Датчики 68а і 68b обертання для обох напрямів розміщені, відповідно, між першою опорою 25а і другою опорою 25b. Відповідно, коли ключ-маніпулятор 10 приводять в обертання R1 управо, перша опора 25а приходить в обертання так, що дане обертання прочитує датчик 68b, а коли ключ-маніпулятор 10 приводять в обертання R2 вліво, його обертання прочитує датчик 68а. У варіанті, показаному на Фіг.14(b), на стороні ключа-маніпулятора 10 може бути виконаний виступ, що обертається, 77, а датчики 68с, 68d, 68e і 68f обертання можуть бути послідовно розташовані у напрямі обертання виступу 77 з правою і з лівого боку. Вказане обертання ключа-маніпулятора 10 управо і вліво може мати два регістри залежно від кругового переміщення (або кута повороту). Тобто, коли ключ-маніпулятор 10 приводять в обертання управо в першому регістрі, датчик 68с, розташований першим справа, прочитує поворот першого регістра, а коли ключманіпулятор 10 приводять в обертання далі управо в другому регістрі, датчик 68d, розташований другим справа, прочитує поворот другого регістра. З іншого боку, в кожному з описаних вище випадків ключ-маніпулятор 10, при необхідності, може мати різні граничні кути обертання. Наприклад, як показано на Фіг.14(а) або 14(b), ключманіпулятор 10 може мати можливість повороту на певний кут або на 360° і більше. Також, обертанням ключа-маніпулятора 10 можна проводити введення однакових даних у всіх натискних ключах 11, однак разні дані можуть бути введені для кожного натискного ключа 11, вибірково скомбінованого з кожним натискним ключем 11. Прив'язка символів до операцій введення У даній заявці термін символ(и) розуміється у вузькому сенсі, як символ алфавіту деякої мови, як наприклад, символи алфавіту хангиль, символи англійської або японської мови. Дані, які можна вводити за допомогою пристрою введення символів, що заявляється, не обмежуються символами у вказаному вище сенсі, але можуть включати різні функціональні команди, наприклад, цифри, спеціальні символи або клавіші введення, пробілу, відміни і т.п. Далі, в даній заявці під голосною у разі іноземної мови розуміється такий символ, вимова якого відповідає якій-небудь голосній алфавіту хангиль, або що належить до меншої за чисельністю алфавітної групи, якщо алфавіт такої іноземної мови підрозділяється на символи двох типів відповідно до стандартів лінгвістичної класифікації. 15 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 Заявлений пристрій 1 введення символів не обмежується яким-небудь особливим способом прив'язки символів до перерахованих вище введенню М першої координати, введенню Р другої координати, центральному введенню С, центрально-комбінованому введенню CM і СР або координатно-комбінованому введенню МР і РМ. Однак, для ефективнішого введення символів, вони можуть бути прив'язані таким чином. Стосовно символів деякого національного алфавіту, приголосні і голосні можуть вводитися за допомогою різних операцій введення. Наприклад, для введення приголосних може бути задіяний введення М першої координати, а для голосних - введення Р другої координати, або навпаки. Перевага такого підходу в тому, що оскільки користувач легко встановить зв'язок між символами, що вводяться, і операціями введення, він може легко звикнути до запропонованого пристрою 1 введення символів. Таблиця на Фіг.15 ілюструє приклад прив'язки символів ряду мов відповідно до вищезазначених приблизних варіантів виконання. Згідно Фіг.15, приголосні для кожної з вказаних мов можуть бути прив'язані до введення М першої координати при двох регістрах, а голосні можуть бути прив'язані до введення Р другої координати при двох регістрах. В даному випадку, приголосні і голосні прив'язані, по суті, роздільно до значущих положень М1, М2... першої координати і значущим положенням Р 1, P2 ... другої координати, але, при необхідності, вони можуть бути прив'язані до значущих положень різних координат. Наприклад, з числа символів хангиль, голосні «ㅒ» і «ㅖ» можуть бути прив'язані до значущих положень М1, М2...... першої координати, або, з англійського алфавіту, приголосні «V» і «Z» можуть бути привласнені значущим положенням Р1, P2 ... другої координати. В цьому випадку, крім голосних, значущим положенням Р1, P2 ... другої координати можуть бути привласнені функціональні команди, такі як введення, пропуск, поворотний крок, ESC і т.д. Далі, в англійському алфавіті високочастотні послідовності символів, наприклад, «СН», «ING» та інші, можуть бути привласнені значущому положенню однієї з координат. У даній заявці, оскільки «W, X Y» функціонально еквівалентні голосним, вони вважаються голосними, на додаток до голосних «А, Е, І, Q U» англійського алфавіту. Крім того, функція перемикання розкладок може бути призначена центральному введенню Сів першому регістрі, а функція перемикання в режим імітації миші може бути призначена центральному введенню С2 в другому регістрі. Як показано на Фіг.16(а), за наявності чотирьох значущих положень Р1, P2... другої координати і двох регістрах, символи «А X», «Е І», «W Y» і «О U» привласнюються значущим положенням Р1, P2. другої координати при прив'язці алфавіту, причому привласнені з накладенням символи розрізняються по введенню Р в першому і другому регістрі відповідно. Тобто, для введення «Е» (Р12) виконують введення Р другої координати в першому регістрі, а для введення «І» (Р22) виконують введення Р другої координати в другому регістрі. Далі, при прив'язці символів алфавіту хангиль, як показано на Фіг.16(b), групи з символів «ㅏ,ㅑ» «ㅓ,ㅕ» «ㅗ, ㅛ» і «ㅜ, ㅠ» можуть бути привласнені з накладенням введенню Р другої координати таким чином, що символи розрізняються по введенню другої координати в першому і другому регістрі відповідно. У протилежність проілюстрованому Фіг.16, введення М першої координати має два регістри і чотири значущі положення М1, М2,..., так що для введення голосних можна здійснювати введення М першої координати. У випадку, якщо прив’язуванні символи мають схожу форму, як описано вище для англійського і корейського алфавіту, тобто хангиль, форма символу-голосної зв'язується з одним із значущих положень Р1, P2 ... другої координати, так що користувач може легко їх впізнати. А саме, для алфавіту хангиль, коли символи-голосні «ㅏ», «ㅓ», «ㅜ» , прив'язані відповідно по сторонах світла, як описано вище, форма символів-голосних асоціюється з напрямами на північ, південь, захід і схід, так що вони стають легко впізнаними для користувача. Як варіант, в англійському алфавіті прив'язка символів може проводитися через групування символів схожої форми. Наприклад, пари символів, такі як «b, d», «p, q», «і, j», «m, w», «u, v», «k, x», «c, o», «a, e», «s, z», «l, r», «f, t», «n, h» або «у, g» можуть бути привласнені з накладенням одному значущому положенню, і при цьому розрізнятися введенням в першому і другому регістрі. 16 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 Як варіант, будь-який з двох спарених символів може бути привласнений введенню М першої координати, а другий - введенню Р другої координати. З іншого боку, цифри, символи, різні функціональні команди і перемикання режимів можуть проводитися введенням М першої координати або введенням Р другої координати, а інші функціональні команди, такі як перемикання режиму введення, введення, ОК та інші, можуть віддаватися за допомогою центрального введення С. У режимі телефону вони можуть віддаватися кнопкою виклику/завершення дзвінка. З іншого боку, запропонований пристрій 1 введення символів може імітувати роботу такого пристрою введення, як миша, за допомогою ключа-маніпулятора 10. В цьому випадку, в режимі імітації миші переміщення закажчика може проводитися введенням М першої координати, а імітація правої і лівої кнопок і прокрутки - введенням Р другої координати або центральним введенням С і введенням Р. При цьому, для введення Р другої координати ключ-маніпулятор 10 може бути розділений за вертикалі на дві частини, так що ліва частина може відповідати лівій кнопці миші, а права частина - правій кнопці миші. Як варіант, ключ-маніпулятор 10 може бути розділений на чотири частини в Х-подібній формі, так що ліва частина може відповідати лівій кнопці миші, права частина - правій кнопці миші, а верхня і нижня частини - колесу прокрутки миші. В цьому випадку, якщо проводити введення М першої координати разом з введенням Р другої координати, відповідним лівій кнопці миші, операція «перетягання» може бути виконана звичайним для миші чином. Спосіб обробки сигналу, звичайно використовуваний в миші, може бути використаний для відповідної обробки сигналу в пристрої 1 введення символів без змін. Як варіант, коли введення М першої координати має декілька регістрів, швидкістю переміщення покажчика миші можна управляти ступінчасто. Вищезазначене перемикання в режим імітації миші може виконуватися окремою клавішею 121 перемикання режиму, або за допомогою ключа-маніпулятора 10. Наприклад, режим може бути перемкнутий окружним переміщенням ключа-маніпулятора 10, центральним введенням С в першому або другому регістрі, або введенням М першої координати в другому регістрі. При виконанні центрального введення С відображається індикатор перемикання режиму введення, здатний переходити до інших режимів, так що такий перехід до інших режимів може бути виконаний введенням М першої координати або введенням Р другої координати. Як варіант, різні режими, наприклад, режим введення символів хангиль, англійського алфавіту, введення цифр, спеціальних символів і режим імітації миші, можуть бути вибрані за допомогою введення М першої координати або введення Р другої координати при одночасному виконанні центрального введення С. До завершення центрального введення С відповідний режим введення відображається, - замість спочатку привласнених значущим положенням символів, - засобом 72 відображення символів або клавіатурним індикатором 74. Фіг.31-33 показують приклади розкладки клавіатури, коли є спарені ключі-маніпулятори 10 справа і зліва. Фіг.31 показує приклад, в якому введення М i Р кожній з координат має вісім значущих положень і два регістри. Символи «N» або «М» в центрі указують дані, що вводяться за допомогою центрального введення С, два зовнішні рядки указують дані, що вводяться за допомогою введення М в першому і другому регістрах, а два рядки в центрі указують дані, що вводяться за допомогою введення Р в першому і другому регістрах. Символи прив'язані до першого регістра введення М першої координати і першому регістру введення Р другої координати кожного з ключів-маніпуляторів 10. Фіг.31(а) показує «основну» розкладку введення, в якій представлені, в цілому, дані в кількості шістдесяти чотирьох, включаючи двадцять шість букв, десять цифр, дванадцять Fклавіш, десять функціональних клавіш, чотири клавіші напрямів, дві клавіші перемикання режимів. Спеціальні символи або інші клавіші з низькою частотою використання можуть бути прив'язані в «наступній» розкладці, перехід на яку проводять вибором клавіші «N» в центрі лівого клавіатурного індикатора 74 (див. Фіг.31(b)). Як варіант, клавіші напрямів можуть бути прив'язані до введення Р другої координати, або F-клавіші можуть бути прив'язані в «наступній» розкладці, а спеціальні символи можуть бути прив'язані в «основній» розкладці. З іншого боку, якщо вибрана клавіша «М» в центрі правого клавіатурного індикатора 74', основна розкладка введення замінювалась розкладкою імітації миші, показаної Фіг.31(с). 17 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 «Наступна» розкладка і розкладка імітації миші можуть бути використані у порядку центрально-комбінованого введення CM і СР, наприклад, коли користувач прибирає палець після виконання центрально-комбінованого введення CM і СР в деякій розкладці введення, вона може бути повернена до попередньої розкладки введення. Тим часом, якщо в запропонованому пристрої 1 введення символів є вищезазначений центральний датчик, символи, що розрізняються за способом введення, можна відображати окремо. Так, символ «б» на Фіг.32 і 33 показує символи, призначені такому введенню Р другої координати, при якому палець стосується клавіші 13 центрального введення, а символ «в» на Фіг.32 і 33 показує символи, що вводяться при введенні Р другої координати окремо. В цьому випадку, оскільки місткість введення Р другої координати збільшується удвічі, тобто, до шістнадцяти символів на один ключ-маніпулятор 10, в цілому може бути призначено тридцять два символи. Відповідно, в показаному на Фіг.31 варіанті виконання кількість даних, яку можна максимально розмістити в одному клавіатурному індикаторі 74, може складати п’ятдесят для одного ключа-маніпулятора 10, зокрема: - шістнадцять для введення М першої координати при двох регістрах - шістнадцять для введення Р другої координати при двох регістрах - шістнадцять для поєднання центральної клавіші 13 і введення Р другої координати - і два для центрального введення С при двох регістрах. Отже, при спарених ключах-маніпуляторах може бути прив'язано, в цілому, сто елементів даних. Відповідно, всі клавіші поточної клавіатури можуть бути розташовані в одній розкладці, що дозволяє виключити «наступну» розкладку. Фіг.32 і 33 показують приклад клавіатурного засобу відображення в малогабаритному пристрої, наприклад в портативному переносному комунікаторі 100. На Фіг.32, як введення М першої координати, так і введення Р другої координати мають вісім значущих положень при одному регістрі, а на Фіг.33 введення М першої координати і введення Р другої координати мають по чотири значущі положення при двох регістрах. Зовнішній рядок на Фіг.32 і два зовнішні рядки на Фіг.33 показують дані, що вводяться за допомогою введення Р другої координати, внутрішній рядок на Фіг.32 і два внутрішні рядки на Фіг.33 показують дані, що вводяться за допомогою введення М першої координати, клавіша, поміщена в овал на Фіг.32 і 33 (див. символ «в») показує дані, що вводяться таким чином, що введення Р другої координати проводять без накладення пальця на ключ-маніпулятор 10. А саме, на лівій стороні Фіг.32(а) і 33(а) показана розкладка імітації миші, а на правій стороні показана основна розкладка введення. Фіг.32b і 33b показують розкладку для англійського алфавіту, ліва сторона на Фіг.32с і 33с показує розкладку для введення цифр, а права сторона тих же фігур показує основну розкладку введення. В обох варіантах на Фіг.32(а) і 33(а), коли вибрана алфавітна клавіша в правому клавіатурному індикаторі 74', обидві сторони міняються як показано на Фіг.32b і 33b. При цьому, коли вибрана клавіша стрілки в центрі лівої сторони на фіг.32b і 33b, виконується перемикання на режим імітації миші, показаний на Фіг.32а і 33а. При виборі клавіші «В» на правій стороні виконується перемикання на основну розкладку введення. Альтернативно, на Фіг.32(а) і 33(а), якщо вибрана цифрова клавіша на правому клавіатурному індикаторі 74', правий клавіатурний індикатор 74 фіксується, і лише лівий клавіатурний індикатор 74' може бути перемкнутий на розкладку режиму імітації миші. У варіантах виконання на Фіг.32 і 33, на відміну від варіанту виконання на Фіг.31, знаки, цифри, F-клавіші, спеціальні символи та інші прив'язані таким чином, що їх введення проводиться з перемиканням режимів. Відповідно, в цьому випадку, введення М першої координати і введення Р другої координати можуть мати один регістр, або число значущих положень може бути зменшено до чотирьох. Далі, при включенні живлення терміналу 100 розкладка імітації миші може спочатку відображатися на одній стороні, а основна розкладка введення - на іншій стороні. З цього стану перемикання на алфавітну розкладку або розкладку введення цифр може бути виконано вибором бажаного режиму в основній розкладці введення. При цьому, ліва розкладка введення може перемикати режим центральним введенням С, щоб її можна було використовувати як розкладку імітації миші в будь-якому режимі, а повернення до основної розкладки введення може бути виконане справа. 18 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 60 Природно, будь-яка з розкладок введення у будь-який момент може виконувати функцію імітації миші в заданому режимі за допомогою центрально-комбінованого введення CM і СР або перемикання режиму може бути виконано на правій розкладці введення. Спаровування ключів-маніпуляторів На основі 110 можуть бути виконані два або більше заявлених пристрої 1 введення символів. Фіг.19 показує експлуатаційний вид приблизного варіанту, в якому справа і зліва на основі 110 портативного переносного комунікатора 100 є два ключі-маніпулятори 10 і 10'. В цьому випадку два ключі-маніпулятори 10 і 10' можуть мати однакову або різну конфігурацію. Тобто, лівий ключ-маніпулятор 10 може виконувати введення М першої координати, введення Р другої координати і центральне введення С, а правий ключ-маніпулятор 10' може виконувати центрально-комбіноване введення CM і СР, або координатно-комбіноване введення МР або РМ, крім введення М першої координати, введення Р другої координати і центрального введення С. Далі, число значущих положень ключів-маніпуляторів 10 і 10' може розрізнятися. Будь-який з ключів-маніпуляторів 10 і 10' може виконувати введення при двох регістрах. Приклад на Фіг.21 ілюструє концепцію роботи кожного з ключів-маніпуляторів 10 і 10' при їх спареному виконанні. На Фіг.21(а) кожний з ключів-маніпуляторів 10 і 10' виконує введення М першої координати і введення Р другої координати при двох регістрах в кожній координаті, причому існує відповідно, вісім значущих положень М1, М2... першої координати і вісім значущих положень Р1, P2,... другої координати. Отже, число символів, які можуть бути введені за допомогою ключів-маніпуляторів 10 і 10', складає, в цілому, тридцять два символи, зокрема шістнадцять символів для введення М першої координати, і шістнадцять для введення Р другої координати, але не рахуючи центрального введення С. Оскільки зліва і справа є два ключі-маніпулятори 10 і 10', загальне число символів, які можуть бути введені, складає шістдесят чотири. Оскільки цієї місткості введення достатньо для розташування всіх двадцяти чотирьох символів хангиль і двадцяти шести букв англійського алфавіту, можна реалізувати введення кожної фонеми за один прийом, а спеціальні символи, цифри або різні функціональні команди і тому подібне можуть бути додатково призначені решті значущих положень. Відповідно, оскільки символи, цифри, спеціальні символи і т.д. можуть бути введені безпосередньо, без перемикання режимів, досягається висока швидкість введення. Наприклад, введення символів можна виконувати обома ключами-маніпуляторами 10 і 10' за допомогою введення Р другої координати при двох регістрах, а переміщення покажчика миші, віддачу функціональних команд, таких як введення, пропуск, відміна та інші, перемикання режимів, введення напрямів і тому подібне, можна виконувати введенням М першої координати. Переміщення курсора, навігацію по меню, настройку каналів/гучності і інше можна виконувати за допомогою введення напрямів. Введення М першої координати може мати тільки один регістр. Однак, як показано на Фіг.21(а), якщо введення М першої координати має два регістри, до нього додатково можна прив'язати цифри, спеціальні символи і тому подібне. І навпаки, введення символів можна виконувати введенням М першої координати при двох регістрах за допомогою двох ключів-маніпуляторів 10 і 10', а віддання функціональних команд, перемикання режимів, введення напрямів і тому подібне можна виконувати введенням Р другої координати. Як варіант, якщо кожний з двох ключів-маніпуляторів 10 і 10' має вісім значущих положень М1, М2... першої координати і вісім значущих положень Р1, P2 ... другої координати, то символи можуть бути прив'язані тільки до введення М і введенню Р в першому регістрі. Альтернативно, як показано на Фіг.21(а), якщо кожний з двох ключів-маніпуляторів 10 і 10' введення має чотири значущі положення М1, М2 ... першої координати і чотири значущі положення Р1, P2 ... другої координати, символи можуть бути прив'язані до введення М і введенню Р в декількох регістрах. Як варіант, символи можна вводити одним з ключів-маніпуляторів 10, тоді як переміщення покажчика миші, віддачу функціональних команд, перемикання режимів, введення напрямів і тому подібне можна проводити другим ключем-маніпулятором 10', або з його допомогою можна вводити цифри, спеціальні символи і т.д. В цьому випадку, оскільки вводити символи можна одночасно з використанням миші, можна реалізувати функціональний еквівалент одночасного використання клавіатури і миші в настільному комп'ютері. Відповідно, навіть на малогабаритному терміналі можна виконувати 19 UA 97807 C2 5 10 15 20 25 30 35 40 45 50 55 різні роботи, а також брати участь в іграх і інших заняттях, які мають на увазі складні операції з одночасним використанням клавіатури і миші. У вищезазначеному випадку, коли введення М першої координати і/або введення Р другої координати має два регістри, можлива прив'язка додаткових цифр, спеціальних символів і тому подібного. Фіг.22 ілюструє концепцію роботи ключів-маніпуляторів 10 і 10' відповідно до іншого варіанту виконання даного винаходу. На Фіг.22(а) і 22(b) показаний тільки один з двох ключівманіпуляторів 10 і 10', що мають однакову конфігурацію. На Фіг.22(а) показано, що введення М має вісім значущих положень М 1, М2 ... першої координати, а введення Р має чотири значущі положення Р1, P2, ... другої координати. Навпаки, на Фіг.22(b) показано, що введення М має чотири значущі положення М 1, М2 ... першої координати, а введення Р має вісім значущих положень Р1, P2.. другої координати. Відповідно, в обох варіантах виконання, оскільки число символів, які можна ввести за допомогою ключа-маніпулятора 10, складає, в цілому, дванадцять, за допомогою двох ключівманіпуляторів 10 і 10' можливе введення, в цілому, двадцяти чотирьох символів. При цьому, якщо введення М першої координати і/або введення Р другої координати мають два регістри, кількість призначених символів може бути додатково збільшено. В цьому випадку введення М може мати вісім значущих положень М 1, М2 ... першої координати, а введення Р може мати шість значущих положень Р1, P2 ... другої координати. Тобто, на Фіг.22(а) показано, що якщо введення М має два регістри, то одному ключевіманіпуляторові 10 може бути призначене, в цілому, двадцять символів, а якщо введення Р має два регістри, загальна кількість символів, що призначаються, може складати шістнадцять. При виконанні спарених ключів-маніпуляторів 10 на основі 110, символи, що призначаються кожному з ключів-маніпуляторів 10 і 10' і кожної операції введення, можуть бути прив'язані до координат різними способами. Наприклад, символи-голосні можуть бути привласнені тільки одній стороні двох ключів-маніпуляторів 10 і 10', або можуть бути роздільно призначені введенню однієї з координат, що виконується кожним з ключів-маніпуляторів 10 і 10'. З іншого боку, при перемиканні на режим імітації миші переміщення покажчика миші може виконуватися одним з двох ключів-маніпуляторів 10 і 10', а робота з ним - другим ключемманіпулятором. Інше Ключ-маніпулятор 10 може мати функцію автоматичного повернення до початкового положення С після виконання введення М першої координати або введення Р другої координати. Функція повернення може бути реалізована різними способами. Наприклад, як показано на Фіг.3, між ключем-маніпулятором 10 і основою 110 може бути поміщена пружна підкладка 21 так, що ключ-маніпулятор 10 може повертатися до початкового положення С після виконання введення М першої координати. Як варіант, в ключі-маніпуляторі 10 на Фіг.6 опора 25 може бути виконана пружною. Стосовно введення другої координати, сам ключ-маніпулятор 10 може бути виконаний з пружного матеріалу. На додаток до функції повернення, пружна підкладка 21 може служити для розрізнення операцій введення, коли введення М має декілька регістрів. Тобто, як показано на Фіг.23, якщо введення М має декілька регістрів, можуть бути виконані дві пружні підкладки 21 (позиції 21а і 21b на Фіг.23) з різними коефіцієнтами пружності. Відповідно, безліч пружних підкладок 21 може бути виконане з різних матеріалів або різної форми. Переважно пружні підкладки 21 розташовані послідовно так, що їх коефіцієнт пружності поступово зростає пропорційно відстані між черговою пружною підкладкою 21 і ключемманіпулятором 10 (тобто, К21а
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice and method for character input
Автори англійськоюOh, Eui-Jin
Назва патенту російськоюУстройство введения символов и способ его применения
Автори російськоюОх Эй-Джин
МПК / Мітки
Мітки: символів, застосування, введення, пристрій, спосіб
Код посилання
<a href="https://ua.patents.su/46-97807-pristrijj-vvedennya-simvoliv-i-sposib-jjogo-zastosuvannya.html" target="_blank" rel="follow" title="База патентів України">Пристрій введення символів і спосіб його застосування</a>
Спосіб введення символів і пристрій для його реалізації
Номер патенту: 46628
Опубліковано: 15.05.2002
Автор: Гнатенко Віталій Іванович
МПК: G09G 5/00
Мітки: пристрій, символів, реалізації, спосіб, введення
Формула / Реферат:
1. Спосіб введення символів, що полягає в торканні або натисканні на визначені ділянки чутливої до торкання або натискання поверхні, який відрізняється тим, що поряд з торканням або натисканням також здійснюють дотичний рух по вищеназваній поверхні з початкової точки торкання, при цьому символ, що вводиться, задають координатами початкової точки торкання і траєкторією цього дотичного руху.2. Пристрій введення, що містить чутливу до...
Привідний механізм для застосування у пристрої введення ліків, пристрій введення ліків, застосування привідного механізму (варіанти) та спосіб збирання пристрою введення ліків
Номер патенту: 87334
Опубліковано: 10.07.2009
Автор: Саікі Масару
МПК: A61M 5/315
Мітки: привідний, ліків, привідного, пристрої, застосування, механізму, варіанти, спосіб, збирання, введення, пристрою, механізм, пристрій
Формула / Реферат:
1. Привідний механізм для застосування у пристрої введення ліків, який містить:плунжерний шток, що має некруглий переріз і є порожнистим, при цьому плунжерний шток блокований від обертання;ходовий гвинт, що знаходиться у зачепленні з плунжерним штоком;шкалу встановлення дози, що поворотно переміщується до проксимального кінця під час встановлення дози і поворотно переміщується до дистального кінця під час видачі...
Пристрій для перенесення символів на вологий склад для покриття, спосіб виготовлення пристрою (варіанти), пристрій для перенесення символів, спосіб перенесення за допомогою магнітного поля заздалегідь заданих с
Номер патенту: 86373
Опубліковано: 27.04.2009
Автори: Десплан Клод-Ален, Беннінгер Наталі, Дего Пьєр, Мюллер Едгар
МПК: B41M 1/00, B42D 15/00, B41M 3/14, B41C 1/02
Мітки: магнітного, пристрій, пристрою, заданих, склад, символів, спосіб, виготовлення, поля, вологий, заздалегідь, покриття, перенесення, допомогою, варіанти
Формула / Реферат:
1. Пристрій для перенесення символів, наприклад малюнка або зображення, на вологий склад для покриття, наприклад склад покриття, що включає принаймні один тип магнітних або намагнічуваних твердих часток, за рахунок впливу магнітного поля, що містить основу з постійно магнітного матеріалу, який постійно намагнічений у напрямку, по суті перпендикулярному поверхні основи, який відрізняється тим, що поверхня основи служить носієм символів у...
Автоматичне розпізнавання символів на структурованому фоні за допомогою комбінування моделей фону і символів
Номер патенту: 70933
Опубліковано: 15.11.2004
Автор: Стрінга Луіджи
МПК: G06T 3/00, G07D 7/12, G07D 7/20, G06K 9/62, G06K 9/68, G06K 9/46, G06T 1/00, G06T 7/00
Мітки: автоматичне, моделей, фону, фоні, розпізнавання, символів, допомогою, структурованому, комбінування
Формула / Реферат:
1. Спосіб автоматичного розпізнавання електронними засобами символів, віддрукованих на будь-якому матеріалі, навіть у випадку, коли фон має контрастні структури, при якому використовують оптоелектронний пристрій зчитування зображення і систему обробки зображення, що містить наступні етапи, при яких здійснюють налагодження, при якій формують модель фону, що отримується шляхом зчитування зображень одного або...
Спосіб введення літер алфавіту та пристрій для його здійснення
Номер патенту: 89352
Опубліковано: 25.01.2010
Автор: Ан Йову
МПК: H04M 1/23
Мітки: літер, пристрій, спосіб, здійснення, алфавіту, введення
Формула / Реферат:
1. Спосіб введення літер алфавіту через інтерфейс шляхом введення літер з клавіатури з матрицею кнопок 3x4 на телефонному апараті, згідно з яким вводять літери з клавіатури із множиною кнопок, яким присвоєні літери алфавіту таким чином, що ті літери, які розташовані поряд на кнопках клавіатури QWERTY, розміщують на одній або суміжних кнопках клавіатури шляхом розділення літер алфавіту на групу І для введення лівою рукою та групу II для...
Попередній патент: Бензиламіни, спосіб їх одержання і їх застосування як протизапальних засобів
Наступний патент: Спосіб генерування лазерного маркування у захищеному документі та захищений документ цього типу
Випадковий патент: Імпульсна хвильова енергоустановка