Двигун системи орієнтації та стабілізації космічних літальних апаратів
Номер патенту: 101719
Опубліковано: 25.09.2015
Автори: Симонов Володимир Федорович, Бичкова Ірина Володимирівна, Субота Анатолій Максимович

Формула / Реферат
Двигун системи орієнтації та стабілізації космічного літального апарата, що містить герметичний корпус, усередині якого розташоване робоче тіло, який відрізняється тим, що робоче тіло виконане з феромагнітного матеріалу, з обох сторін від нього знаходяться пружні елементи, торці герметичного корпусу з'єднані каналом зв'язку, посередині якого розташовано жиклер, на зовнішній поверхні герметичного корпусу симетрично відносно робочого тіла розташовані ліва та права обмотки, кінці яких через комутатор з'єднані з джерелом живлення, яке в свою чергу з'єднане з блоком управління, герметичний корпус і канал зв'язку заповнені демпфірувальною рідиною.
Текст
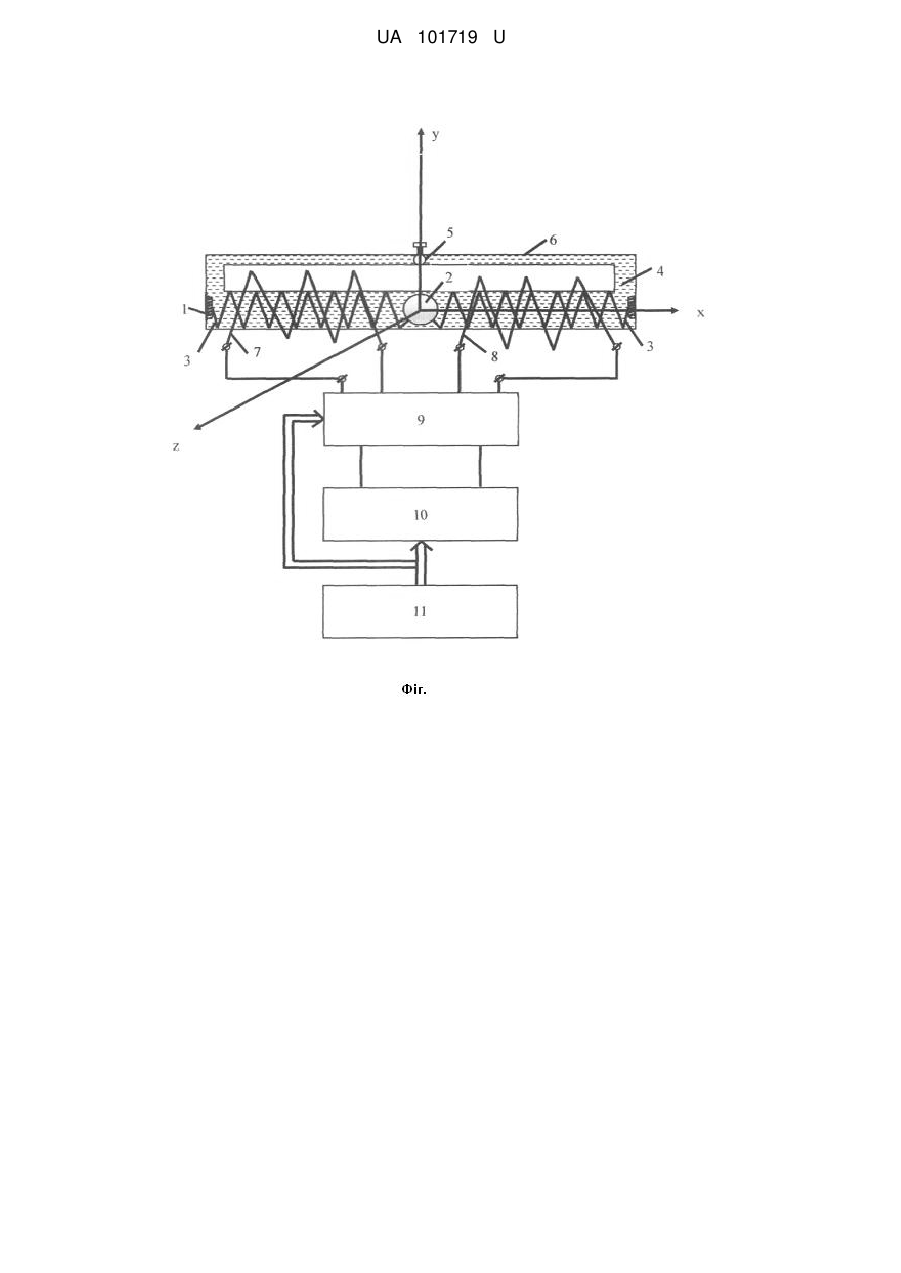
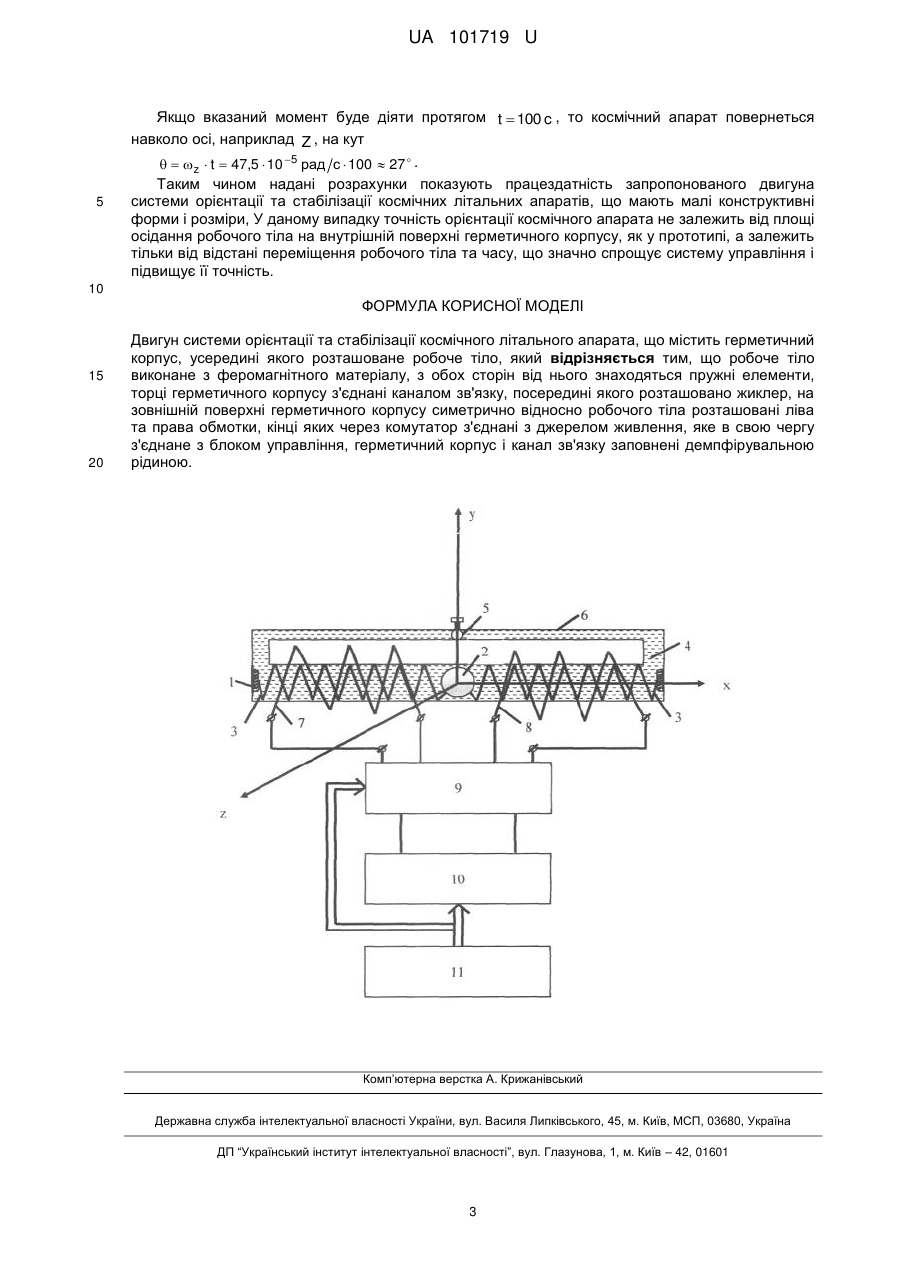
Реферат: Двигун системи орієнтації та стабілізації космічного літального апарата містить герметичний корпус, усередині якого розташоване робоче тіло. Робоче тіло виконане з феромагнітного матеріалу, з обох сторін від нього знаходяться пружні елементи, торці герметичного корпусу з'єднані каналом зв'язку, посередині якого розташовано жиклер, на зовнішній поверхні герметичного корпусу симетрично відносно робочого тіла розташовані ліва та права обмотки, кінці яких через комутатор з'єднані з джерелом живлення, яке в свою чергу з'єднане з блоком управління, герметичний корпус і канал зв'язку заповнені демпфірувальною рідиною. UA 101719 U (54) ДВИГУН СИСТЕМИ ОРІЄНТАЦІЇ ТА СТАБІЛІЗАЦІЇ КОСМІЧНИХ ЛІТАЛЬНИХ АПАРАТІВ UA 101719 U UA 101719 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем управління малих космічних апаратів, а саме до виконавчих пристроїв систем орієнтації і стабілізації апаратів у просторі з використанням градієнта сили тяжіння. Відомий двигун системи орієнтації і стабілізації космічного літального апарата (КЛА) що містить масивний корпус, усередині якого розташована система регулювання довжини пружинного елемента, робоче тіло - пружинний елемент, один з кінців якого з'єднаний з системою регулювання, а другий, що виходить за межі корпуса, з'єднаний з тілом малої маси [Fogarty Charies P. Orbital engin. Пат. США, кл. 244-155 (В644 G 1/00), № 3868072; Заявл. 28.09.71; Опубл. 25.02.75]. Управління орієнтацією та стабілізацією КЛА досягається за рахунок регулювання довжин пружного елемента, що знаходиться за межами корпусу, за допомогою системи регулювання. Тіло малої маси, що знаходиться на кінці пружного елемента, здійснює момент сили, котра необхідна для орієнтації та стабілізації космічного літального апарата. Недоліком відомого двигуна є складність конструкції і системи його регулювання, а також необхідність в наявності отвору в корпусі КЛА для забезпечення виходу робочого тіла до космічного простору. Найбільш близьким двигуном системи орієнтації та стабілізації космічних апаратів є двигун системи орієнтації та стабілізації літального апарата, що містить герметичний корпус, усередині якого розташовано робоче тіло у вигляді речовини, що сублімує при нагріві, обмотки електронагрівників, холодильників, що розташовані у торців корпусу. При цьому робоче тіло розташовано у протилежних торцях корпусу. [Двигатель системы ориентации и стабилизации космических летательных аппаратов. Патент РФ № 2281890С1, МПК B64G J/34 (2006.01), опубл.20.08.2006, Бюл. № 23]. До недоліків такого двигуна належать низька точність системи управління та її складність. В основу даної корисної моделі поставлена задача підвищення точності та спрощення конструкції двигуна та системи його управління, а також зниження енергоспоживання, що забезпечить його використання у системах орієнтації та стабілізації малих космічних апаратів. Поставлена задача вирішується завдяки тому, що двигун системи орієнтації та стабілізації космічного літального апарата, що містить герметичний корпус, усередині якого розташовано робоче тіло, згідно з корисною моделлю, має робоче тіло виконане з феромагнітного матеріалу, з обох сторін якого знаходяться пружні елементи, торці герметичного корпусу з'єднані каналом зв'язку, посередині якого розташовано жиклер, на зовнішній поверхні герметичного корпусу симетрично відносно робочого тіла розташовані ліва та права обмотки, кінці яких через комутатор з'єднані з джерелом живлення, яке в свою чергу, з'єднане з блоком управління як герметичний корпус так і канал зв'язку заповнено демпфірувальною рідиною. Таким чином, згідно з корисною моделлю, двигун у своєму складі не містить ні нагрівачів, ні холодильників, що значно спрощує його конструкцію та систему його управління, а також енергоспоживання. Перераховані заходи безумовно забезпечують можливість використання такого двигуна безпосередньо на малих космічних апаратах з метою побудови систем орієнтації і стабілізації. Суть корисної моделі пояснюється кресленням, де на фіг. зображена загальна схема двигуна системи орієнтації та стабілізації космічних апаратів. На фіг. позначено: 1 - герметичний корпус, 2 - робоче тіло, 3 - пружний елемент, 4 демпфірувальна рідина, 5 - жиклер, 6 - канал зв'язку, 7 - ліва обмотка, 8 - права обмотка, 9 комутатор, 10 - джерело живлення, 11 - блок управління. Двигун системи орієнтації та стабілізації космічних літальних апаратів працює наступним чином. Після вироблення блоком управління 11 команди про величину та знак зміни кутового положення космічного апарата інформація передається з виходу блока управління 11 на вхід джерела живлення 10 і на комутатор 9. При цьому в залежності від необхідного знака повороту космічного апарата комутатор 9 підключає до виходу джерела живлення 10 ліву 7 або праву 8 обмотку. Величина кута повороту КЛА залежить від тривалості підключення лівої 7 або правої 8 обмотки до джерела живлення 10, що регулюється блоком управління 11. В результаті протікання струму, наприклад, по лівій обмотці 7 виникає електричне поле вздовж осьової лінії герметичного корпусу 1 і робоче тіло 2, будучи виготовленим з феромагнітного матеріалу, зміщується в ліву частину герметичного корпусу І. При цьому пружний елемент стискається, а коливання при переміщенні робочого тіла 2 гасяться демпфірувальною рідиною 4. При необхідності зміни коефіцієнта демпфірування використовують жиклер 5, що може впливати на прохідний переріз каналу зв'язку 6. 1 UA 101719 U 5 В режимі стабілізації працюють як ліва 7, так і права 8 обмотки. Середнє положення робочого тіла 2 при відсутності управляючих сигналів забезпечується дією на робоче тіло 2 пружних елементів 3. Розглянемо приклад розрахунку двигуна. Припустимо, що циліндричний корпус двигуна має довжину l=10 см, а діаметр d=1,1 см, робоче тіло має діаметр d=1 см і виконано з 3 феромагнітного матеріалу щільністю ρ=7,8 гр/см . Розрахуємо крутний момент, який утворює робоче тіло при його переміщенні на X=5 см. 1. Знайдемо об'єм робочого тіла: d3 3,14 1 0,52 см3 . 6 6 2. Знаходимо масу робочого тіла: V 10 m V 7,8 0,52 4 г 4 10 3 кг . 3. В умовах гравітації на робоче тіло діє сила F mg . Припустимо, що орбіта, на якій знаходиться космічний апарат, віддалена від поверхні Землі 15 на відстань h 20 10 3 км . Тоді R0 , g g0 R h 0 де g0 9,8 м с 2 ; R0 6370 км (середній радіус Землі), маємо: 6370 6370 g 9,8 2,37 м с 2 . 9,8 26370 6370 20000 Таким чином, сила, що діє на робоче тіло двигуна 20 F mg 4 10 3 2,37 9,5 10 3 H , а момент Mкр F X 9,5 103 5 102 47,5 105 H м . 4. Згідно з динамікою кутового руху космічного літального апарата d d d d d 1 I Mкр , або Mкр dt dt dt dt dt I де d - кутова швидкість обертів космічного апарата; I - момент інерції КА. dt При умові I Mкр const і початкових умовах d 0 після інтегрування останнього виразу dt маємо: I 25 tk t 30 35 0 d d 1 t dt Mкр t k dt 0 dt dt I або d 1 1 Mкр t k t 0 Mкр t . dt I I Знайдемо кутову швидкість переорієнтації космічного апарата за t 1c . d 1 Mкр 1 . dt I Припустимо, що космічний апарат має форму шара діаметром D 0,5 м . Тоді його момент інерції відносно осі симетрії 2 2 I MR 2 10 0,5 2 1кг м2 . 5 5 Таким чином кутова швидкість космічного апарата після дії на його крутний момент Mкр буде дорівнювати: d Mkр 47,5 10 5 47,5 10 5 рад с . dt I 1 2 UA 101719 U Якщо вказаний момент буде діяти протягом t 100 c , то космічний апарат повернеться навколо осі, наприклад Z , на кут 5 z t 47,5 10 5 рад с 100 27 . Таким чином надані розрахунки показують працездатність запропонованого двигуна системи орієнтації та стабілізації космічних літальних апаратів, що мають малі конструктивні форми і розміри, У даному випадку точність орієнтації космічного апарата не залежить від площі осідання робочого тіла на внутрішній поверхні герметичного корпусу, як у прототипі, а залежить тільки від відстані переміщення робочого тіла та часу, що значно спрощує систему управління і підвищує її точність. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Двигун системи орієнтації та стабілізації космічного літального апарата, що містить герметичний корпус, усередині якого розташоване робоче тіло, який відрізняється тим, що робоче тіло виконане з феромагнітного матеріалу, з обох сторін від нього знаходяться пружні елементи, торці герметичного корпусу з'єднані каналом зв'язку, посередині якого розташовано жиклер, на зовнішній поверхні герметичного корпусу симетрично відносно робочого тіла розташовані ліва та права обмотки, кінці яких через комутатор з'єднані з джерелом живлення, яке в свою чергу з'єднане з блоком управління, герметичний корпус і канал зв'язку заповнені демпфірувальною рідиною. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64G 1/34
Мітки: двигун, літальних, системі, стабілізації, космічних, апаратів, орієнтації
Код посилання
<a href="https://ua.patents.su/5-101719-dvigun-sistemi-oriehntaci-ta-stabilizaci-kosmichnikh-litalnikh-aparativ.html" target="_blank" rel="follow" title="База патентів України">Двигун системи орієнтації та стабілізації космічних літальних апаратів</a>
Спосіб визначення орієнтації геостаціонарних космічних апаратів
Номер патенту: 97909
Опубліковано: 10.04.2015
Автори: Войтюк Віктор Володимирович, Ожінський Віктор Васильович, Ситко Віктор Валерійович, Мороз В'ячеслав Саватійович
МПК: G05B 17/00
Мітки: космічних, апаратів, орієнтації, визначення, спосіб, геостаціонарних
Формула / Реферат:
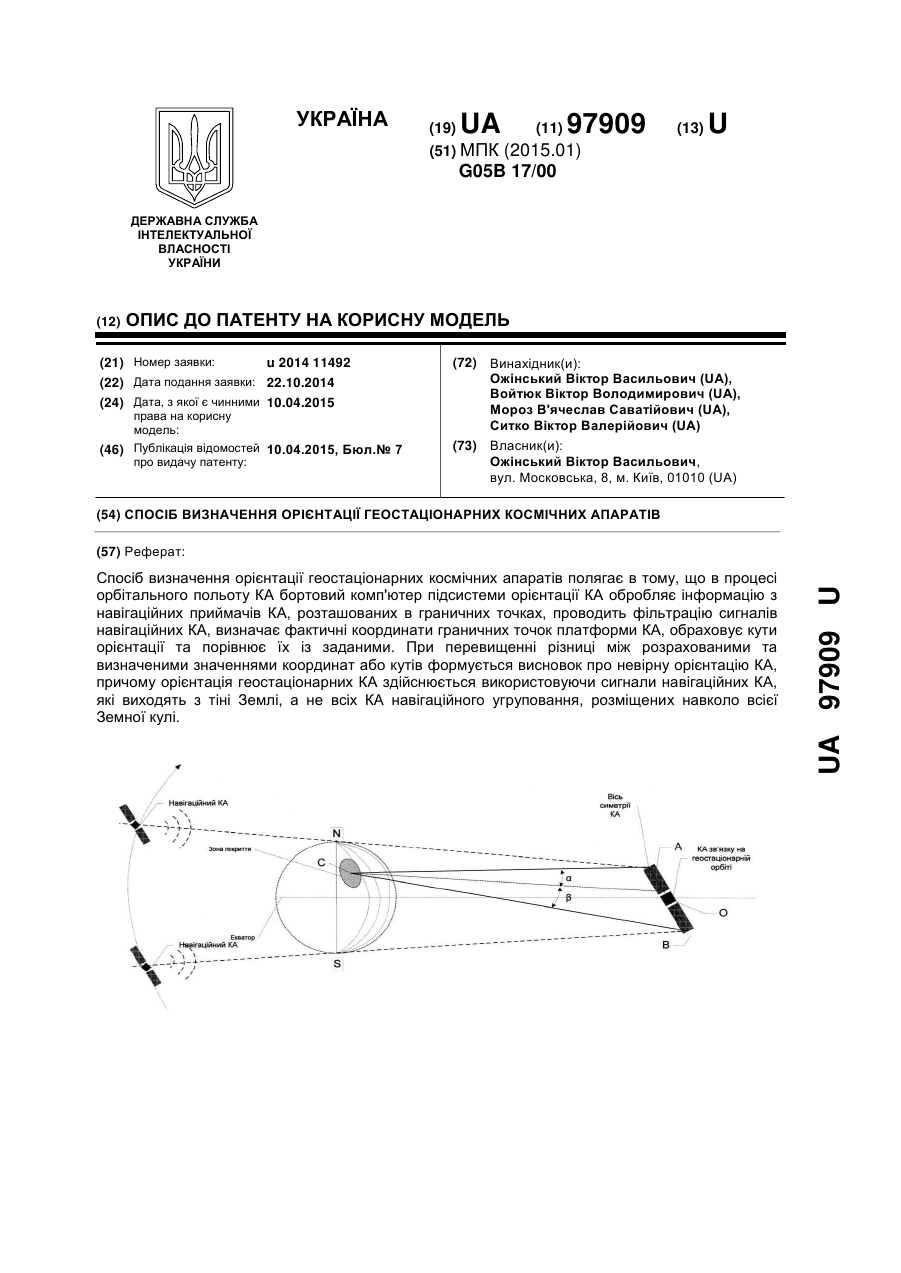
Спосіб визначення орієнтації геостаціонарних космічних апаратів, який полягає в тому, що в процесі орбітального польоту КА бортовий комп'ютер підсистеми орієнтації КА обробляє інформацію з навігаційних приймачів КА, розташованих в граничних точках, проводить фільтрацію сигналів навігаційних КА, визначає фактичні координати граничних точок платформи КА, обраховує кути орієнтації та порівнює їх із заданими, при перевищенні різниці між...
Спосіб контролю орієнтації антен геостаціонарних космічних апаратів
Номер патенту: 81531
Опубліковано: 10.07.2013
Автори: Ожінський Віктор Васильович, Богом'я Володимир Іванович, Загорулько Олександр Миколайович, Дзюбчук Роман Васильович
МПК: G05B 17/00
Мітки: космічних, контролю, орієнтації, апаратів, спосіб, антен, геостаціонарних
Формула / Реферат:
Спосіб контролю орієнтації антен геостаціонарних космічних апаратів (КА), який полягає в тому, що в процесі орбітального польоту КА за допомогою бортового комп'ютера підсистеми орієнтації КА обробляють інформацію з навігаційного приймача КА про сузір'я навігаційних КА (їх ефемериди), які знаходяться в границях променів антен КА зв'язку, визначають фактичні координати перетину ними границь променя та порівнюють їх із попередньо розрахованими,...
Спосіб контролю сонячної орієнтації фотоелектричних перетворювачів космічних апаратів
Номер патенту: 72511
Опубліковано: 27.08.2012
Автори: Топольницький Павло Петрович, Фриз Петро Васильович, Ожінський Віктор Васильович, Фриз Сергій Петрович
МПК: G05B 17/00
Мітки: орієнтації, сонячної, спосіб, апаратів, фотоелектричних, космічних, перетворювачів, контролю
Формула / Реферат:
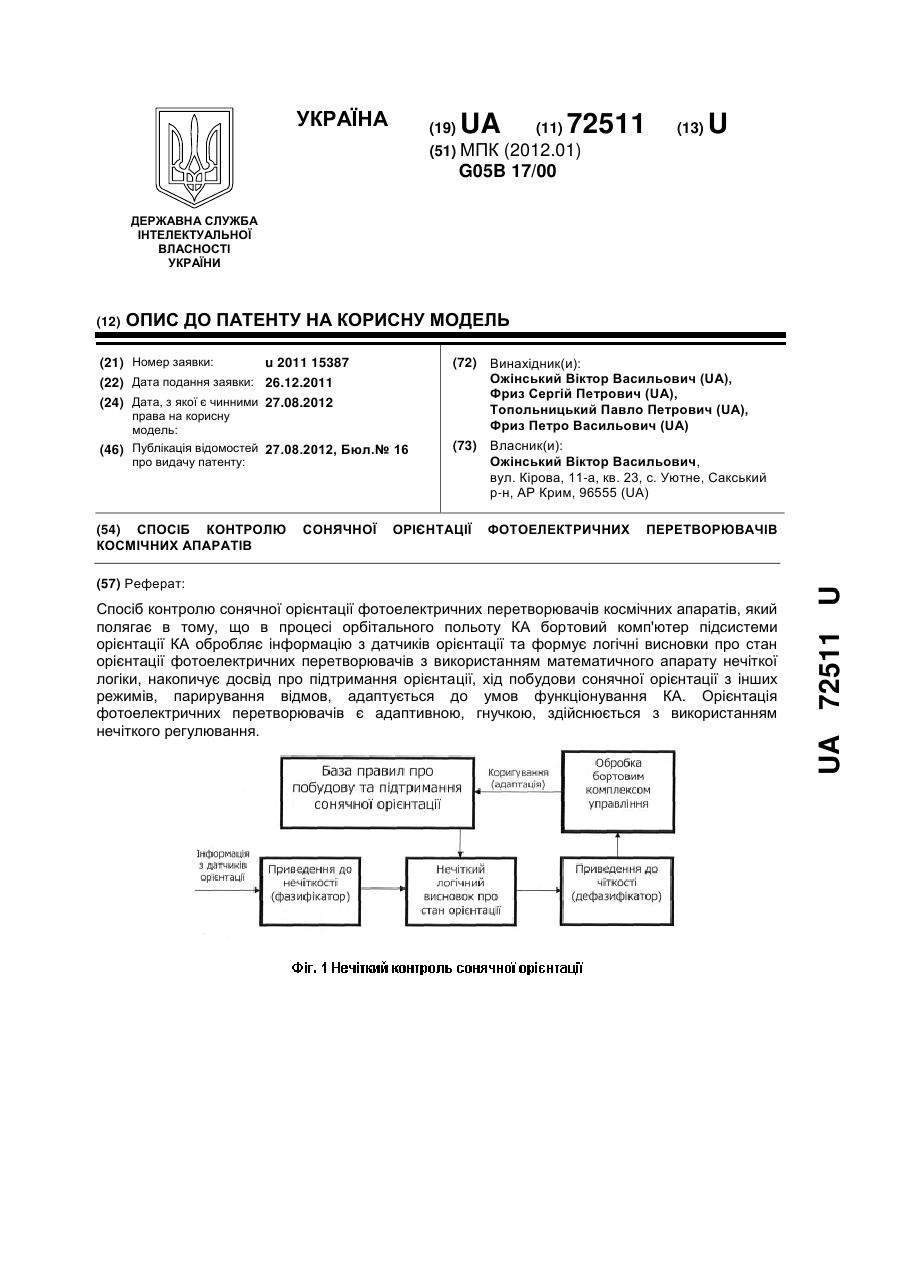
Спосіб контролю сонячної орієнтації фотоелектричних перетворювачів космічних апаратів, який полягає в тому, що в процесі орбітального польоту КА бортовий комп'ютер підсистеми орієнтації КА обробляє інформацію з датчиків орієнтації та формує логічні висновки про стан орієнтації фотоелектричних перетворювачів з використанням математичного апарату нечіткої логіки, накопичує досвід про підтримання орієнтації, хід побудови сонячної орієнтації з...
Спосіб контролю орієнтації геостаціонарних космічних апаратів
Номер патенту: 80542
Опубліковано: 10.06.2013
Автори: Загорулько Олександр Миколайович, Фриз Сергій Петрович, Богом'я Володимир Іванович, Ожінський Віктор Васильович
МПК: G05B 17/00, G05B 15/00
Мітки: апаратів, орієнтації, геостаціонарних, спосіб, контролю, космічних
Формула / Реферат:
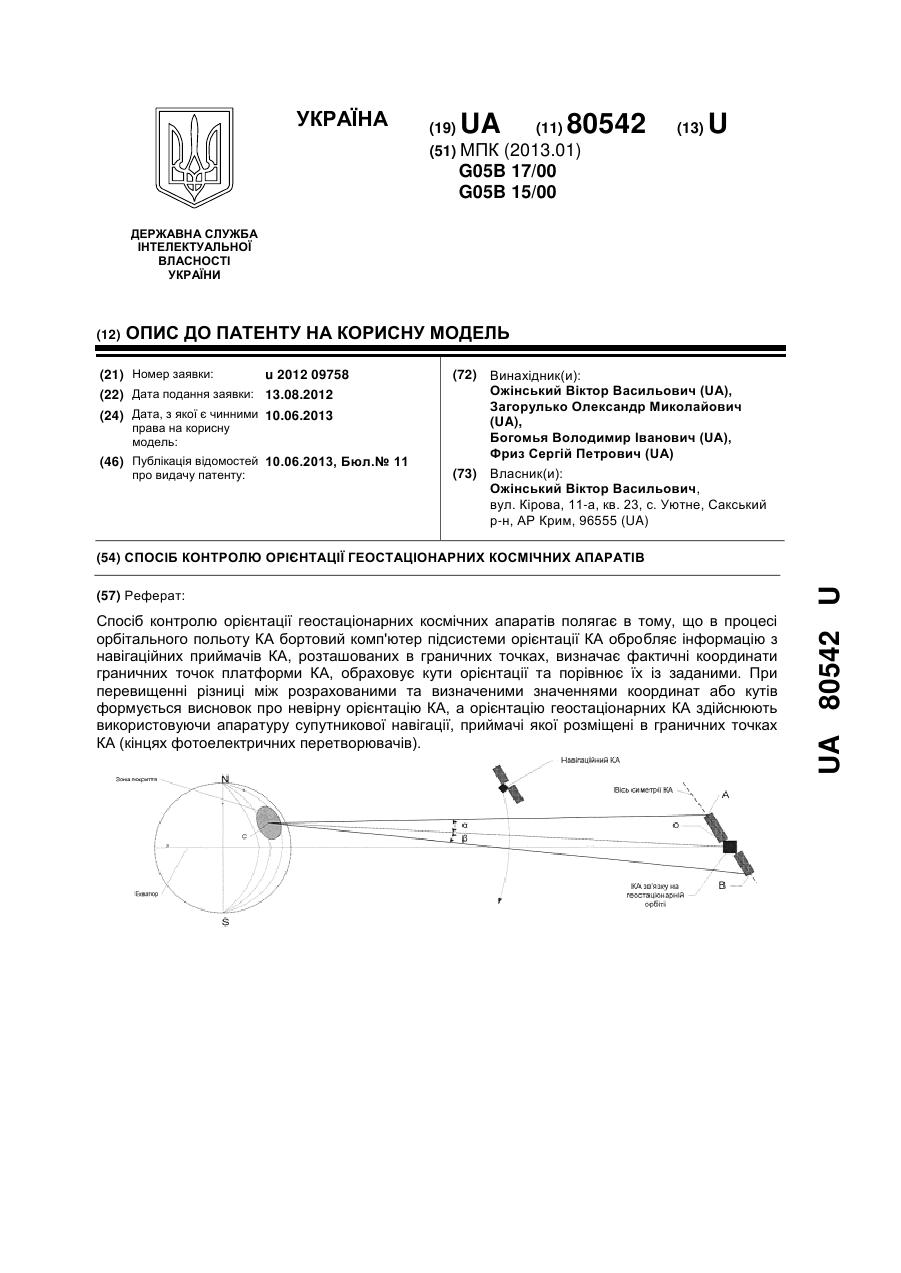
Спосіб контролю орієнтації геостаціонарних космічних апаратів, який полягає в тому, що в процесі орбітального польоту КА бортовий комп'ютер підсистеми орієнтації КА обробляє інформацію з навігаційних приймачів КА, розташованих в граничних точках, визначає фактичні координати граничних точок платформи КА, обраховує кути орієнтації та порівнює їх із заданими, і при перевищенні різниці між розрахованими та визначеними значеннями координат або...
Спосіб зменшення маси газореактивних двигунових установок корекції орбіти і орієнтації космічних апаратів
Номер патенту: 73354
Опубліковано: 15.07.2005
Автори: Кошкін Михайло Іванович, Доброгорський Віктор Антонович, Шабохін Віктор Олексійович, Сергійчук Борис Васильович, Аніщенко Вячеслав Михайлович
МПК: F02K 9/42
Мітки: двигунових, корекції, орбіти, орієнтації, космічних, спосіб, установок, газореактивних, апаратів, зменшення, маси
Формула / Реферат:
Спосіб зменшення маси газореактивних двигунових установок корекції орбіти і орієнтації космічних апаратів шляхом заправлення балонів для зберігання робочого тіла дво- чи одноатомними газами - повітрям, азотом чи аргоном, який відрізняється тим, що спочатку балони заправляють принаймні одним багатоатомним газом, наприклад двоокисом вуглецю, при цьому обмежують парціальний тиск заправлення ним балонів величиною, що не перевищує тиска пружності...
Попередній патент: Спосіб відливання безперервнолитих слябів
Наступний патент: Формувач одиночної двоімпульсної кодової серії з програмованими часовими параметрами
Випадковий патент: Спосіб холецистостомії