Спосіб визначення орієнтації геостаціонарних космічних апаратів
Номер патенту: 97909
Опубліковано: 10.04.2015
Автори: Ожінський Віктор Васильович, Войтюк Віктор Володимирович, Ситко Віктор Валерійович, Мороз В'ячеслав Саватійович

Формула / Реферат
Спосіб визначення орієнтації геостаціонарних космічних апаратів, який полягає в тому, що в процесі орбітального польоту КА бортовий комп'ютер підсистеми орієнтації КА обробляє інформацію з навігаційних приймачів КА, розташованих в граничних точках, проводить фільтрацію сигналів навігаційних КА, визначає фактичні координати граничних точок платформи КА, обраховує кути орієнтації та порівнює їх із заданими, при перевищенні різниці між розрахованими та визначеними значеннями координат або кутів формується висновок про невірну орієнтацію КА, який відрізняється тим, що орієнтація геостаціонарних КА здійснюється використовуючи сигнали навігаційних КА, які виходять з тіні Землі, а не всіх КА навігаційного угруповання, розміщених навколо всієї Земної кулі.
Текст
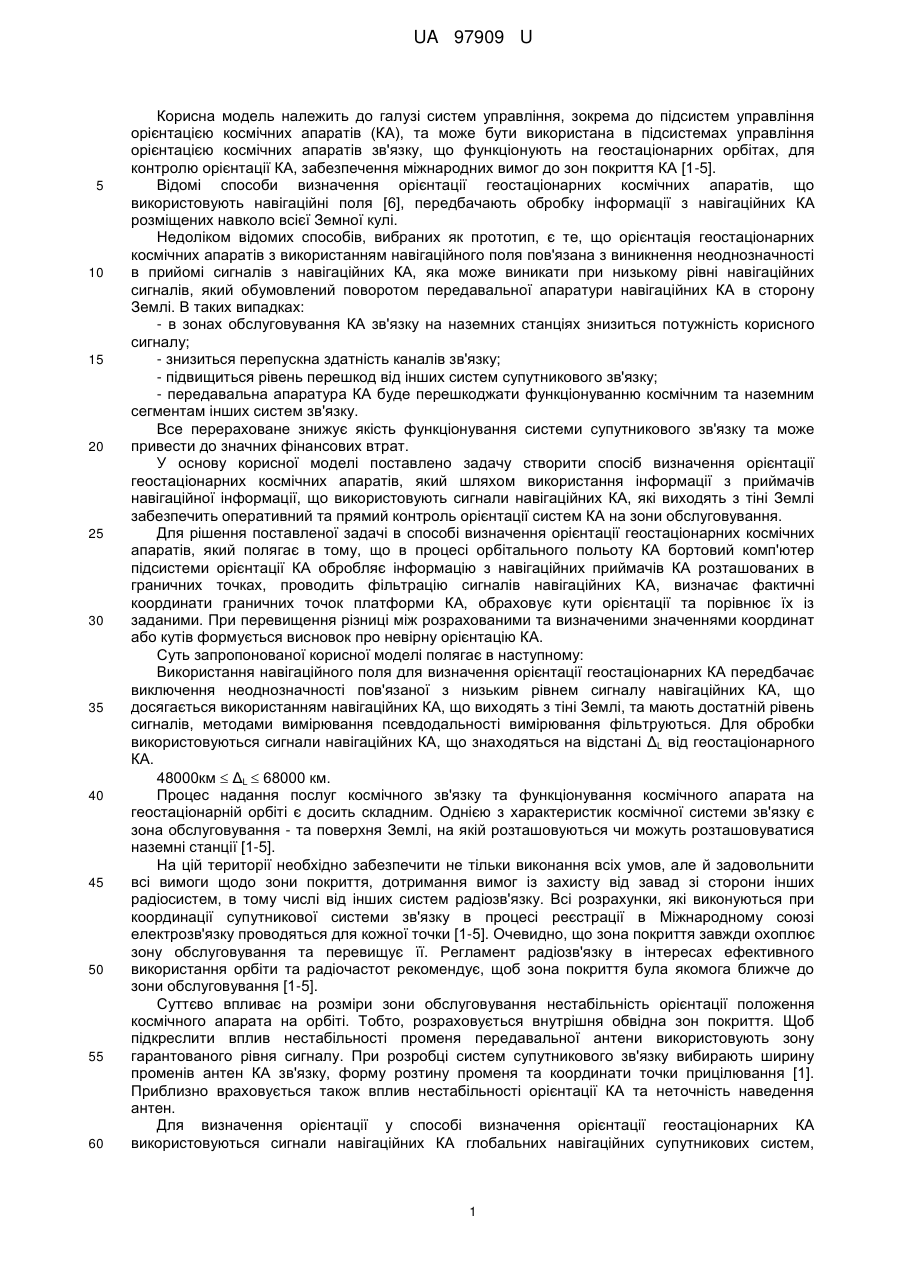
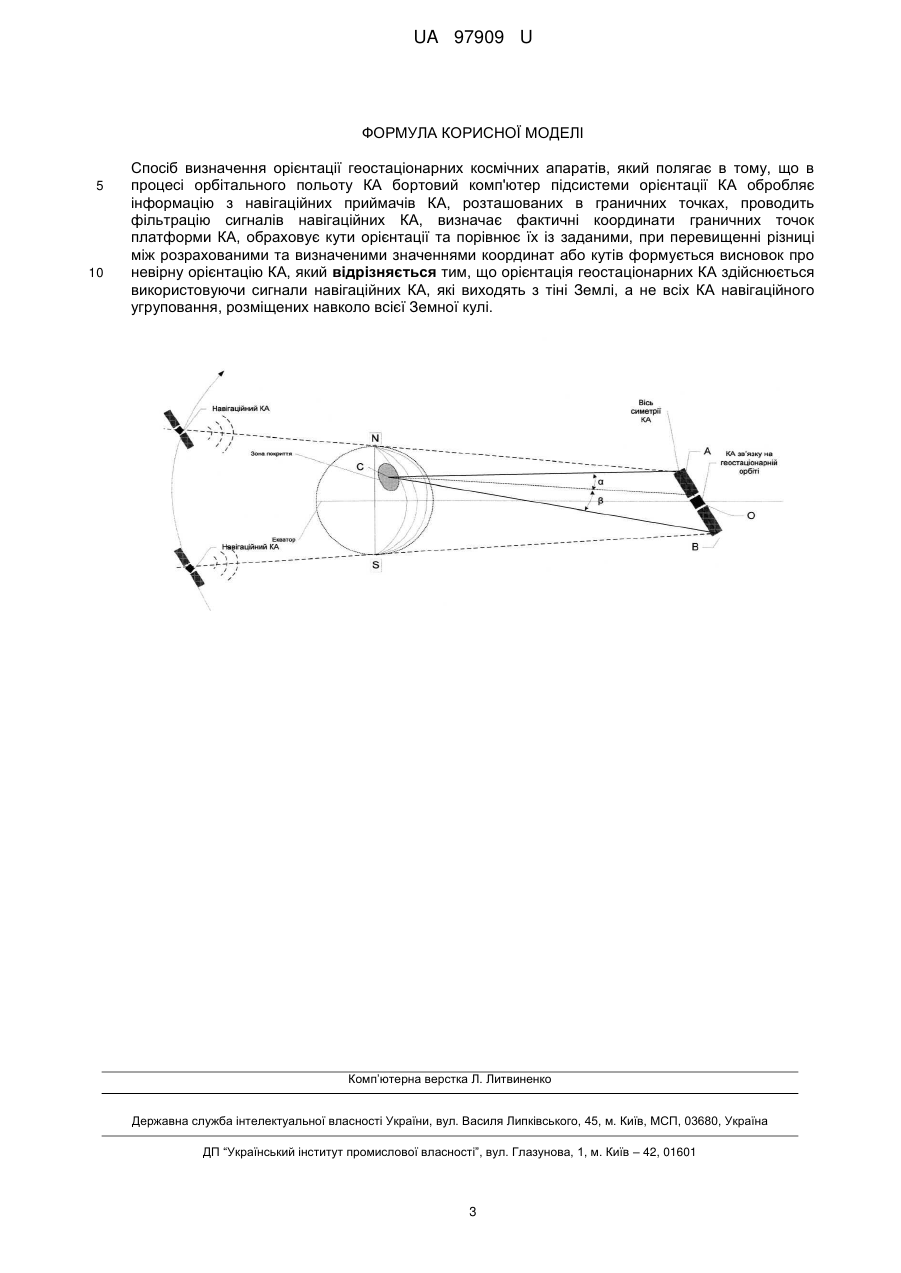
Реферат: UA 97909 U UA 97909 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі систем управління, зокрема до підсистем управління орієнтацією космічних апаратів (КА), та може бути використана в підсистемах управління орієнтацією космічних апаратів зв'язку, що функціонують на геостаціонарних орбітах, для контролю орієнтації КА, забезпечення міжнародних вимог до зон покриття КА [1-5]. Відомі способи визначення орієнтації геостаціонарних космічних апаратів, що використовують навігаційні поля [6], передбачають обробку інформації з навігаційних КА розміщених навколо всієї Земної кулі. Недоліком відомих способів, вибраних як прототип, є те, що орієнтація геостаціонарних космічних апаратів з використанням навігаційного поля пов'язана з виникнення неоднозначності в прийомі сигналів з навігаційних КА, яка може виникати при низькому рівні навігаційних сигналів, який обумовлений поворотом передавальної апаратури навігаційних КА в сторону Землі. В таких випадках: - в зонах обслуговування КА зв'язку на наземних станціях знизиться потужність корисного сигналу; - знизиться перепускна здатність каналів зв'язку; - підвищиться рівень перешкод від інших систем супутникового зв'язку; - передавальна апаратура КА буде перешкоджати функціонуванню космічним та наземним сегментам інших систем зв'язку. Все перераховане знижує якість функціонування системи супутникового зв'язку та може привести до значних фінансових втрат. У основу корисної моделі поставлено задачу створити спосіб визначення орієнтації геостаціонарних космічних апаратів, який шляхом використання інформації з приймачів навігаційної інформації, що використовують сигнали навігаційних КА, які виходять з тіні Землі забезпечить оперативний та прямий контроль орієнтації систем КА на зони обслуговування. Для рішення поставленої задачі в способі визначення орієнтації геостаціонарних космічних апаратів, який полягає в тому, що в процесі орбітального польоту КА бортовий комп'ютер підсистеми орієнтації КА обробляє інформацію з навігаційних приймачів КА розташованих в граничних точках, проводить фільтрацію сигналів навігаційних ΚΑ, визначає фактичні координати граничних точок платформи КА, обраховує кути орієнтації та порівнює їх із заданими. При перевищення різниці між розрахованими та визначеними значеннями координат або кутів формується висновок про невірну орієнтацію КА. Суть запропонованої корисної моделі полягає в наступному: Використання навігаційного поля для визначення орієнтації геостаціонарних КА передбачає виключення неоднозначності пов'язаної з низьким рівнем сигналу навігаційних КА, що досягається використанням навігаційних КА, що виходять з тіні Землі, та мають достатній рівень сигналів, методами вимірювання псевдодальності вимірювання фільтруються. Для обробки використовуються сигнали навігаційних КА, що знаходяться на відстані ΔL від геостаціонарного КА. 48000км ΔL 68000 км. Процес надання послуг космічного зв'язку та функціонування космічного апарата на геостаціонарній орбіті є досить складним. Однією з характеристик космічної системи зв'язку є зона обслуговування - та поверхня Землі, на якій розташовуються чи можуть розташовуватися наземні станції [1-5]. На цій території необхідно забезпечити не тільки виконання всіх умов, але й задовольнити всі вимоги щодо зони покриття, дотримання вимог із захисту від завад зі сторони інших радіосистем, в тому числі від інших систем радіозв'язку. Всі розрахунки, які виконуються при координації супутникової системи зв'язку в процесі реєстрації в Міжнародному союзі електрозв'язку проводяться для кожної точки [1-5]. Очевидно, що зона покриття завжди охоплює зону обслуговування та перевищує її. Регламент радіозв'язку в інтересах ефективного використання орбіти та радіочастот рекомендує, щоб зона покриття була якомога ближче до зони обслуговування [1-5]. Суттєво впливає на розміри зони обслуговування нестабільність орієнтації положення космічного апарата на орбіті. Тобто, розраховується внутрішня обвідна зон покриття. Щоб підкреслити вплив нестабільності променя передавальної антени використовують зону гарантованого рівня сигналу. При розробці систем супутникового зв'язку вибирають ширину променів антен КА зв'язку, форму розтину променя та координати точки прицілювання [1]. Приблизно враховується також вплив нестабільності орієнтації КА та неточність наведення антен. Для визначення орієнтації у способі визначення орієнтації геостаціонарних КА використовуються сигнали навігаційних КА глобальних навігаційних супутникових систем, 1 UA 97909 U 5 10 методами вимірювання псевдодальності, визначаються сигнали навігаційних КА що виходять з тіні Землі, оскільки їх сигнали мають максимальну потужність. Оскільки геометричні розміри КА значно перевищують мінімальну точність визначення координат, за умови встановлення додаткових навігаційних приймачів можливим є визначення координат найбільш віддалених точок платформи навігаційного КА - кінців фотоелектричних перетворювачів (сонячних батарей) (точки А, В фіг. 1). При розробці космічної системи зв'язку відомими є розрахункові координати середини зони обслуговування (точки прицілювання) геостаціонарного КА (точка С фіг. 1) в Гинвіцькій системі координат (XC, YC, ZС) та координати контрольних точок КА зв'язку на геостанціонарній орбіті (точки А, О, В фіг. 1), які гринвіцькій системі координат є незмінними з заданою точністю: точка А має координати (XА, YА, ZА), точка В - (XВ, YВ, ZВ), точка О - (XО, YО, ZО). Далі, визначаючи за допомогою апаратури супутникової навігації фактичні координати точок А, О, В - (XАФ, YАФ, ZАФ). (XВФ, YВФ, ZВФ). (XОФ, YОФ, ZОФ) проводиться перевірка умов: (1), A A , YA YA , Y Z A Z A , Z 40 (7), YO YO , Y 35 (6), O O , 30 (5), ZB ZB , Z · 25 (4), YB YB , Y 20 (3), B B , 15 (2), (8), (9). ZO ZO , Z Значення усіх Δ визначається на етапі проектування космічної системи зв'язку та залежить від ряд різних факторів описаних у [1-5]. При невиконанні вимог (1-9) до бортового комплексу управління подається сигнал про збій орієнтації КА. Порядок функціонування КА після цього визначається причинами збою та описуються у [1-5]. Залежно від способів управління рухом центру мас КА та навколо центра мас за методиками визначеними в [1-5], використавши традиційні геометричні формули можливо визначити значення кутів АСО (α) та ВСО (β) і здійснювати контроль знаходження в заданих границях цих кутів чи їх значень відносно осей інших систем координат. При збільшенні часу активного існування на орбіті, використовуючи статистичні процедури та надлишковість інформації (вимірювання проводяться кожну секунду) точність визначення координат, як наслідок і точність орієнтації зростає. ПЕРЕЛІК ПОСИЛАНЬ 1. Спутниковая связь и вещание: справочник /[Бартенев В.Α., Болотов Г.В., Быков В.Л. И др.]; под ред. Л.Я. Кантора. - [3-е изд.]. - М.: Радио и связь, 1997. - 528 с: ил. ISBN 966-84243-34Х. 2. Evans В.G. Satellite Communication Systems /Evans В.G.; The Institution of Engineering and Technology. - London.: The Institution of Engineering and Technology, 2008. - 727 с. - ISBN 0 85296 899 X. 3. Elbert B.L. Introduction to Satellite Communication /Elbert B.L. - [Third Edition]. - Norwood.: ARTECH HOUSE, 2008. - 447 с. ISBN-13: 978-1-59693-210-4. 4. Maral G. Satellite Communication Systems /G. Maral, M. Bousquet; Ecole Nationale Superieure des Telecommunications, Site de Toulouse, France. - West Sussex, PO19 8SQ, United Kingdom: John Wiley & Sons Ltd, 2009. - 713 с. - ISBN 978-0-470-71458-4. 5. Maini A.K. Satellite Technology Principles and Applications /A.K. Maini, V. Agrawal; Laser Science and Technology Centre, Defence Research and Development Organization Ministry of Defence, India. - West Sussex, United Kingdom: John Wiley & Sons Ltd, 2011. - 674 с. - ISBN 978-0470-66024-9. 6. Ожінський В.В. Спосіб контролю орієнтації геостаціонарних космічних апаратів /В.В. Ожінський, О.М. Загорулько, В.І. Богомья, СП. Фриз(Україна). - № u2012 09758.-Бюл. №1. - 6 с. 45 2 UA 97909 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб визначення орієнтації геостаціонарних космічних апаратів, який полягає в тому, що в процесі орбітального польоту КА бортовий комп'ютер підсистеми орієнтації КА обробляє інформацію з навігаційних приймачів КА, розташованих в граничних точках, проводить фільтрацію сигналів навігаційних КА, визначає фактичні координати граничних точок платформи КА, обраховує кути орієнтації та порівнює їх із заданими, при перевищенні різниці між розрахованими та визначеними значеннями координат або кутів формується висновок про невірну орієнтацію КА, який відрізняється тим, що орієнтація геостаціонарних КА здійснюється використовуючи сигнали навігаційних КА, які виходять з тіні Землі, а не всіх КА навігаційного угруповання, розміщених навколо всієї Земної кулі. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 17/00
Мітки: спосіб, орієнтації, апаратів, геостаціонарних, космічних, визначення
Код посилання
<a href="https://ua.patents.su/5-97909-sposib-viznachennya-oriehntaci-geostacionarnikh-kosmichnikh-aparativ.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення орієнтації геостаціонарних космічних апаратів</a>
Спосіб контролю орієнтації геостаціонарних космічних апаратів
Номер патенту: 80542
Опубліковано: 10.06.2013
Автори: Ожінський Віктор Васильович, Богом'я Володимир Іванович, Фриз Сергій Петрович, Загорулько Олександр Миколайович
МПК: G05B 15/00, G05B 17/00
Мітки: контролю, геостаціонарних, спосіб, орієнтації, космічних, апаратів
Формула / Реферат:
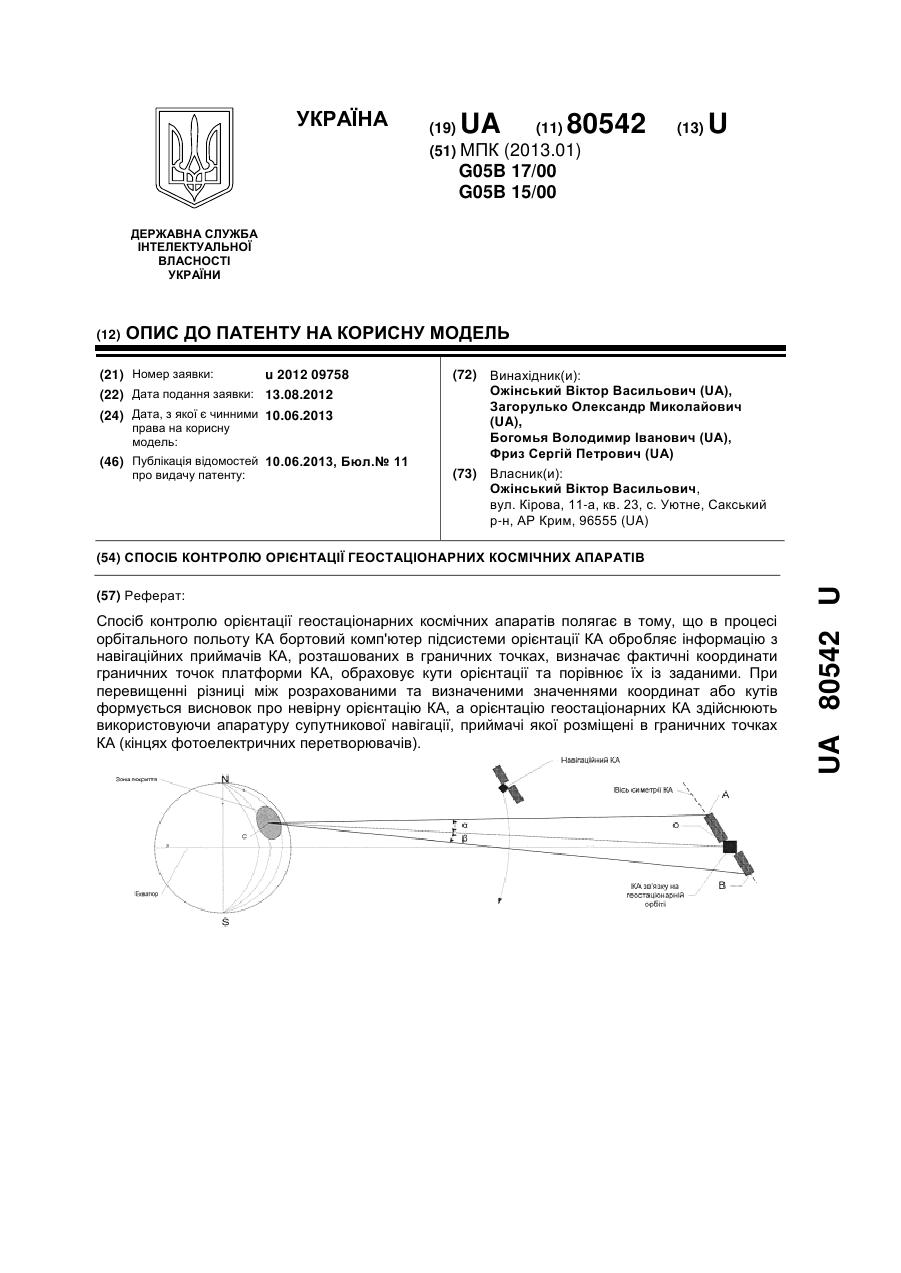
Спосіб контролю орієнтації геостаціонарних космічних апаратів, який полягає в тому, що в процесі орбітального польоту КА бортовий комп'ютер підсистеми орієнтації КА обробляє інформацію з навігаційних приймачів КА, розташованих в граничних точках, визначає фактичні координати граничних точок платформи КА, обраховує кути орієнтації та порівнює їх із заданими, і при перевищенні різниці між розрахованими та визначеними значеннями координат або...
Спосіб контролю орієнтації антен геостаціонарних космічних апаратів
Номер патенту: 81531
Опубліковано: 10.07.2013
Автори: Богом'я Володимир Іванович, Загорулько Олександр Миколайович, Ожінський Віктор Васильович, Дзюбчук Роман Васильович
МПК: G05B 17/00
Мітки: контролю, апаратів, спосіб, космічних, антен, геостаціонарних, орієнтації
Формула / Реферат:
Спосіб контролю орієнтації антен геостаціонарних космічних апаратів (КА), який полягає в тому, що в процесі орбітального польоту КА за допомогою бортового комп'ютера підсистеми орієнтації КА обробляють інформацію з навігаційного приймача КА про сузір'я навігаційних КА (їх ефемериди), які знаходяться в границях променів антен КА зв'язку, визначають фактичні координати перетину ними границь променя та порівнюють їх із попередньо розрахованими,...
Спосіб контролю сонячної орієнтації фотоелектричних перетворювачів космічних апаратів
Номер патенту: 72511
Опубліковано: 27.08.2012
Автори: Ожінський Віктор Васильович, Фриз Сергій Петрович, Топольницький Павло Петрович, Фриз Петро Васильович
МПК: G05B 17/00
Мітки: сонячної, космічних, контролю, фотоелектричних, спосіб, орієнтації, апаратів, перетворювачів
Формула / Реферат:
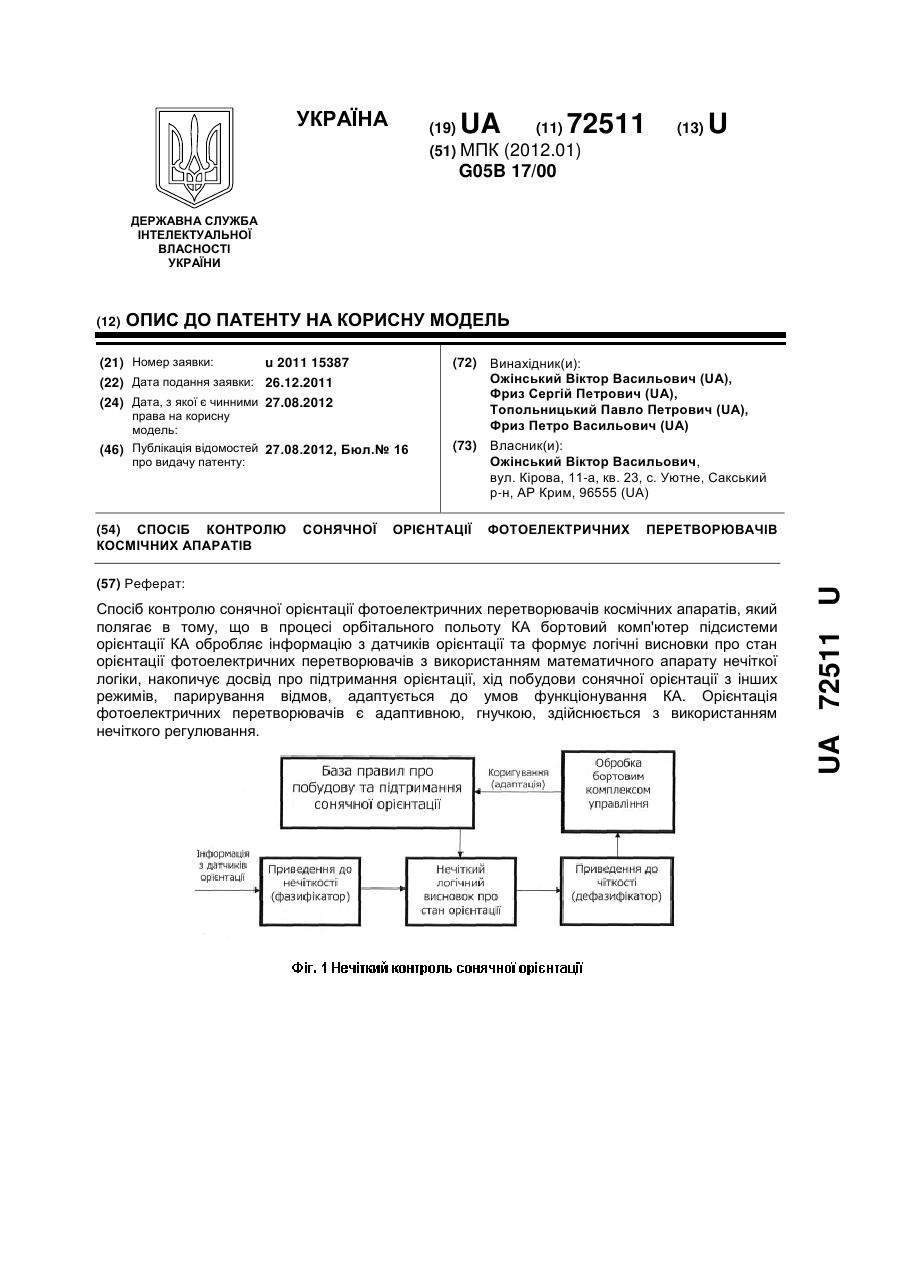
Спосіб контролю сонячної орієнтації фотоелектричних перетворювачів космічних апаратів, який полягає в тому, що в процесі орбітального польоту КА бортовий комп'ютер підсистеми орієнтації КА обробляє інформацію з датчиків орієнтації та формує логічні висновки про стан орієнтації фотоелектричних перетворювачів з використанням математичного апарату нечіткої логіки, накопичує досвід про підтримання орієнтації, хід побудови сонячної орієнтації з...
Спосіб зменшення маси газореактивних двигунових установок корекції орбіти і орієнтації космічних апаратів
Номер патенту: 73354
Опубліковано: 15.07.2005
Автори: Доброгорський Віктор Антонович, Сергійчук Борис Васильович, Шабохін Віктор Олексійович, Кошкін Михайло Іванович, Аніщенко Вячеслав Михайлович
МПК: F02K 9/42
Мітки: зменшення, газореактивних, маси, космічних, орбіти, установок, спосіб, двигунових, корекції, орієнтації, апаратів
Формула / Реферат:
Спосіб зменшення маси газореактивних двигунових установок корекції орбіти і орієнтації космічних апаратів шляхом заправлення балонів для зберігання робочого тіла дво- чи одноатомними газами - повітрям, азотом чи аргоном, який відрізняється тим, що спочатку балони заправляють принаймні одним багатоатомним газом, наприклад двоокисом вуглецю, при цьому обмежують парціальний тиск заправлення ним балонів величиною, що не перевищує тиска пружності...
Інтегрована система навігаційного забезпечення низькоорбітальних космічних апаратів
Номер патенту: 24686
Опубліковано: 10.07.2007
Автори: Загорулько Олександр Миколайович, Моргун Олександр Андрійович, Козелкова Катерина Сергіївна, Богом'я Володимир Іванович
МПК: G01S 5/02, G01C 21/24
Мітки: космічних, апаратів, навігаційного, забезпечення, система, низькоорбітальних, інтегрована
Формула / Реферат:
Інтегрована система навігаційного забезпечення низькоорбітальних космічних апаратів, що містить антенний пристрій, навігаційний приймальний пристрій і навігаційний процесор, яка відрізняється тим, що навігаційний процесор виконаний з можливістю динамічної фільтрації вимірювань на основі моделі гравітаційного поля Землі з гармоніками розкладання гравітаційного потенціалу розмірності 36х36, що дозволяє підвищити точність визначення координат...
Попередній патент: Спосіб фіксації та забору тканин піднижньощелепної протоки у експериментальних тварин
Наступний патент: Тарга для розміщення додаткового обладнання човна
Випадковий патент: Спосіб підготовки мінеральної води для виробництва напоїв