Пристрій для попередження зіткнень повітряних суден
Номер патенту: 25757
Опубліковано: 30.10.1998
Автори: Білецький Анатолій Якович, Совтус Інна Кузьмівна, Корнійчук Май Тихонович, Шутко Микола Олександрович, Троценко Володимир Петрович, Семенченко Андрій Іванович
Формула / Реферат
1. Пристрій для попередження зіткнень повітряних суден [1], що містить три регістри, дешифратор, три елементи АБО, два суматори, блок постійної пам'яті, n елементів І, n блоків обробки першої, другої та третьої координати, n блоків аналізу курсу, виходи яких утворюють n перших керуючих виходів пристрою, інформаційні входи першого, другого й третього регістрів є першою, другою й третьою групами одноіменних входів пристрою відповідно, виходи першого та другого регістрів з'єднані з першими та другими групами інформаційних входів відповідно n блоків обробки першої координати, треті групи входів яких є четвертою групою входів пристрою, вихід третього регістра з'єднаний зі входом дешифратора, кожен з n виходів якого підключений до одноіменного керуючого входу відповідних n блоків обробки першої, другої та третьої координати і блоків аналізу курсу і утворюють n других керуючих виходів пристрою, виходи кожного з n блоків обробки першої координати з'єднані з інформаційним входом відповідних з n блоків обробки другої та третьої координати, перші групи інформаційних виходів n блоків обробки другої координати і перші групи інформаційних виходів п блоків обробки третьої координати з'єднані зі входами першого та другого елементів АБО відповідно, виходи яких з'єднані з об'єднаними першими групами інформаційних входів n блоків обробки другої координати і n блоків обробки третьої координати відповідно, друга група інформаційних входів n блоків обробки другої координати і n блоків обробки третьої координати об'єднані і є п'ятою і шостою групами входів пристрою відповідно, керуючі виходи кожного з n блоків обробки другої та третьої координати з'єднані зі входами відповідного з n елементів І, виходи кожного з n елементів І підключені до входів відповідного з n блоків аналізу курсу, треті групи інформаційних входів кожного з n блоків обробки другої та третьої координат є сьомою групою входів пристрою, треті групи інформаційних виходів i - х блоків обробки другої та третьої координати ![]() з'єднані відповідно з першими та другими групами інформаційних входів i - го блоку аналізу курсу, треті та четверті інформаційні входи n блоків аналізу курсу відповідно об'єднані між собою і з'єднані з виходом першого та другого суматорів відповідно, інформаційний вихід i - го блоку аналізу курсу з'єднаний з i - м входом третього елемента АБО, вихід якого з'єднаний з першими входами першого та другого суматорів, зі входом блока постійної пам'яті, перший та другий виходи котрого з'єднані з другими входами першого та другого суматорів відповідно, другі та треті групи інформаційних виходів блоків обробки другої та третьої координат утворюють n груп перших та других, третіх та четвертих інформаційних виходів пристрою відповідно, тактові входи цих блоків є тактовими входами пристрою, який відрізняється тим, що в нього введені четвертий та п'ятий елементи АБО та n блоків аналізу часу, причому чотири перших інформаційних входи кожного i - го
з'єднані відповідно з першими та другими групами інформаційних входів i - го блоку аналізу курсу, треті та четверті інформаційні входи n блоків аналізу курсу відповідно об'єднані між собою і з'єднані з виходом першого та другого суматорів відповідно, інформаційний вихід i - го блоку аналізу курсу з'єднаний з i - м входом третього елемента АБО, вихід якого з'єднаний з першими входами першого та другого суматорів, зі входом блока постійної пам'яті, перший та другий виходи котрого з'єднані з другими входами першого та другого суматорів відповідно, другі та треті групи інформаційних виходів блоків обробки другої та третьої координат утворюють n груп перших та других, третіх та четвертих інформаційних виходів пристрою відповідно, тактові входи цих блоків є тактовими входами пристрою, який відрізняється тим, що в нього введені четвертий та п'ятий елементи АБО та n блоків аналізу часу, причому чотири перших інформаційних входи кожного i - го ![]() блока аналізу часу з'єднані з i - ю групою перших, других, третіх і четвертих інформаційних виходів блока попередження зіткнень повітряних суден, сім груп інформаційних входів якого утворюють сім інформаційних входів пристрою, п'яті, шості та сьомі інформаційні входи n блоків аналізу часу об'єднані відповідно між собою і з'єднані з виходом четвертого, п'ятого елементів АБО і з восьмим інформаційним входом пристрою відповідно, перший та другий інформаційні виходи i - го
блока аналізу часу з'єднані з i - ю групою перших, других, третіх і четвертих інформаційних виходів блока попередження зіткнень повітряних суден, сім груп інформаційних входів якого утворюють сім інформаційних входів пристрою, п'яті, шості та сьомі інформаційні входи n блоків аналізу часу об'єднані відповідно між собою і з'єднані з виходом четвертого, п'ятого елементів АБО і з восьмим інформаційним входом пристрою відповідно, перший та другий інформаційні виходи i - го ![]() блоку аналізу часу підключені до i - го входу четвертого й п'ятого елементів АБО відповідно, а перший та другий керуючі входи i - го
блоку аналізу часу підключені до i - го входу четвертого й п'ятого елементів АБО відповідно, а перший та другий керуючі входи i - го ![]() блока аналізу часу підключені відповідно до i - ої групи перших та других керуючих виходів блока попередження зіткнень повітряних суден, тактові входи котрого є тактовими входами пристрою, керуючі виходи n блоків аналізу часу є n виходами пристрою.
блока аналізу часу підключені відповідно до i - ої групи перших та других керуючих виходів блока попередження зіткнень повітряних суден, тактові входи котрого є тактовими входами пристрою, керуючі виходи n блоків аналізу часу є n виходами пристрою.
2. Пристрій для попередження зіткнень повітряних суден по п.1, який відрізняється тим, що кожен з n блоків аналізу часу містить чотири ключа, п'ять помножувачів, чотири суматора, два дільника, елемент порівняння, вихід якого є керуючим виходом блока, інформаційні входи першого та другого, третього та четвертого ключів попарно об'єднані між собою і є третім та четвертим інформаційними входами блоку, другий керуючий вхід блоку з'єднаний зі входом другого й третього ключів, виходи яких є першим і другим інформаційними виходами блоку відповідно, перший керуючий вхід блоку підключений до входу першого ключа та четвертого ключа, вихід якого через послідовно з'єднані третій помножувач, перші суматор та дільник, четвертий суматор підключений до першого входу схеми порівняння, другий вхід схеми порівняння є сьомим інформаційним входом блоку, вихід першого ключа через послідовно з'єднані п'ятий помножувач, третій суматор, другий дільник підключений до першого входу четвертого суматора, перший інформаційний вхід блока з'єднаний з першим входом третього суматора і першим входом першого помножувача, вихід якого через послідовно з'єднані другий суматор і перший дільник підключений до другого входу п'ятого помножувача, другий інформаційний вхід блоку підключений до другого входу четвертого помножувача, вихід якого з'єднаний з другим входом другого суматора, п'ятий інформаційний вхід блоку з'єднаний з другим входом третього помножувача, першим входом четвертого помножувача і другим входом другого дільника, шостий інформаційний вхід блоку підключений до другого входу першого помножувача і першого входу другого помножувача, вихід якого підключений до першого входу першого суматора, вихід першого ключа з'єднаний з другим входом другого помножувача.
Текст
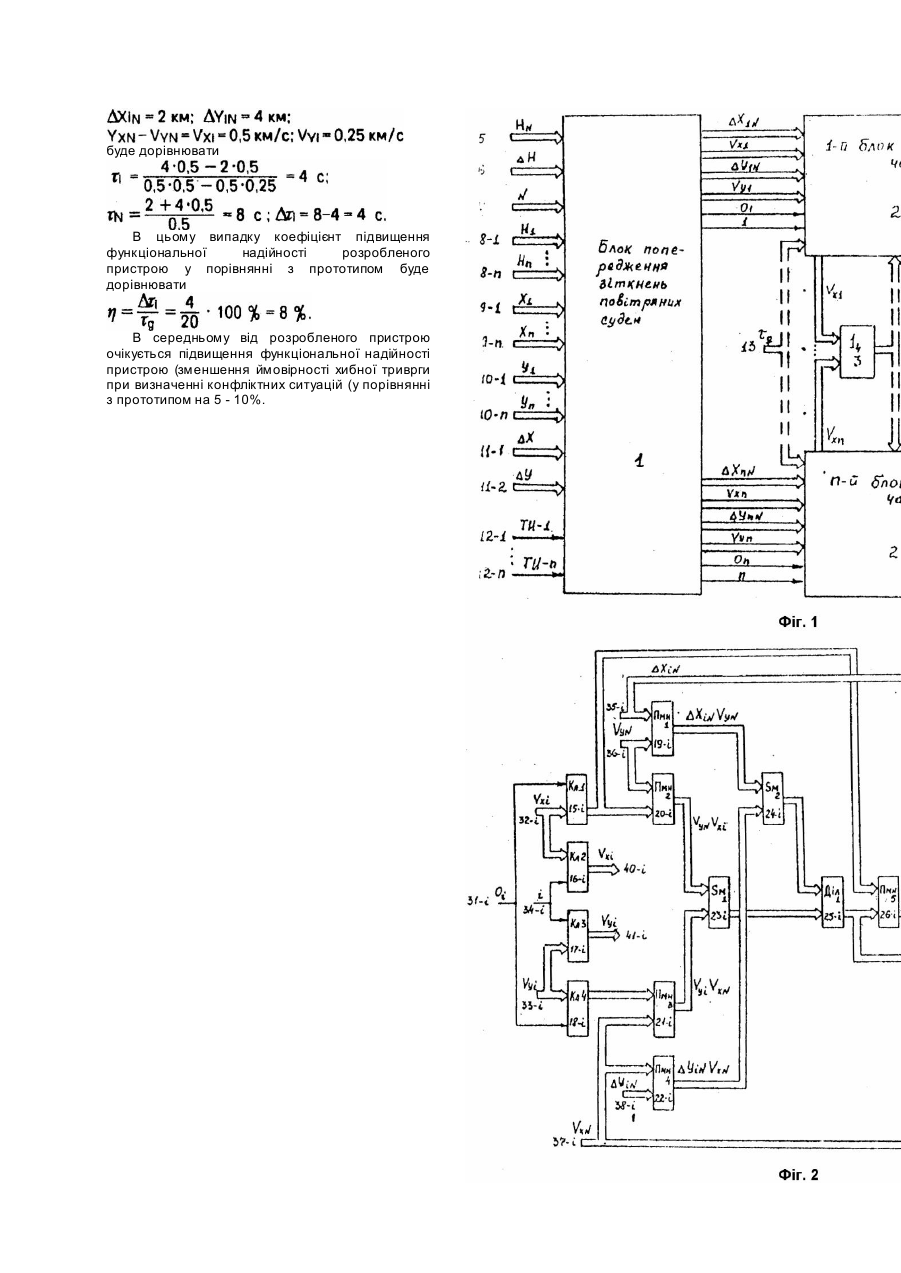
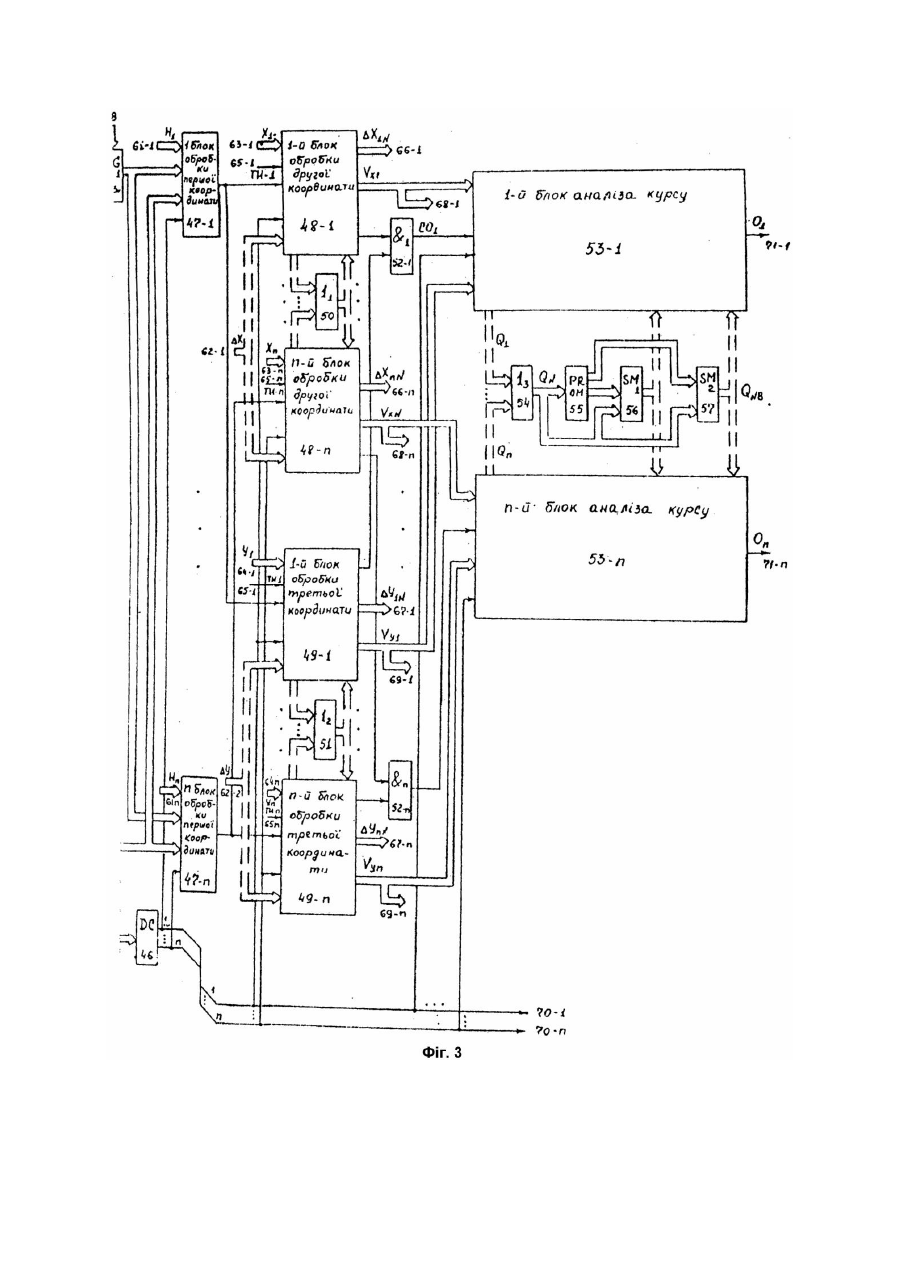
Пристрій для попередження зіткнень повітряних суден відноситься до спеціалізованих засобів обчислювальної техніки та може бути використаний у навігаційних системах керування повітряним рухом для забезпечення безпеки польотів повітряних суден. Відомий пристрій [1] для попередження зіткнень повітряних суден. Недоліком прототипу є низька функціональна надійність пристрою (велика ймовірність хибної тривоги при визначенні факту можливого зіткнення повітряних суден), обумовлена тим, що в прототипі конфліктна ситуація оцінюється без урахування моментів часу прибуття конфліктуючих повітряних суден в точку їх найбільшого зближення (часу до найбільшого зближення повітряних суден). В основу винаходу поставлена задача створення пристрою для попередження зіткнень повітряних суден, у якому за рахунок урахуванням часу до найбільшого зближення конфліктуючи х повітряних суден забезпечується підвищення функціональної надійності пристрою. Поставлена задача розв'язується тим, що у пристрій для попередження зіткнень повітряних суден [1], що містить три регістри, дешифратор, три елементи АБО, два суматори, блок постійної пам'яті, n елементів І, n блоків обробки першої, другої та третьої координати, n блоків аналізу курсу, ви ходи яких утворюють n перших керуючих виходів пристрою, інформаційні входи першого, другого й третього регістрів є першою, другою й третьою групами одноіменних входів пристрою відповідно, виходи першого та другого регістрів з'єднані з першими та другими групами інформаційних входів відповідно n блоків обробки першої координати, треті групи входів яких є четвертою гр упою входів пристрою, ви хід третього регістра з'єднаний зі входом дешифратора, кожен з n виходів якого підключений до одноіменного керуючого входу відповідних n блоків обробки першої, другої та третьої координати і блоків аналізу курсу і утворюють n других керуючи х виходів пристрою, виходи кожного з n блоків обробки першої координати з'єднані з інформаційним входом відповідних з n блоків обробки другої та третьої координати, перші групи інформаційних виходів n блоків обробки другої координати і перші групи інформаційних виходів n блоків обробки третьої координати з'єднані зі входами першого та другого елементів АБО відповідно, виходи яких з'єднані з об'єднаними першими групами інформаційних входів n блоків обробки другої координати і n блоків обробки третьої координати відповідно, друга гр упа інформаційних входів n блоків обробки другої координати і n блоків обробки третьої координати об'єднані і є п'ятою і шостою групами входів пристрою відповідно, керуючі виходи кожного з n блоків обробки другої та третьої координати з'єднані зі входами відповідного з n елементів І, виходи кожного з елементів І підключені до входів відповідного з n блоків аналізу курсу, треті гр упи інформаційних входів кожного з n блоків обробки другої та третьої координат є сьомою групою входів пристрою, треті гр упи інформаційних виходів i - х блоків обробки другої та третьої координати (i = 1,n) з'єднані відповідно з першими та другими групами інформаційних входів i - го блоку аналізу курсу, треті та че тверті інформаційні входи n блоків аналізу курсу відповідно об'єднані між собою і з'єднані з виходом першого та другого суматорів відповідно, інформаційний вихід i - го блоку аналізу курсу з'єднаний з i - м входом третього елемента АБО, вихід якого з'єднаний з першими входами першого та другого суматорів, зі входом блока постійної пам'яті, перший та другий виходи котрого з'єднані з другими входами першого та другого суматорів відповідно, другі та треті групи інформаційних виходів блоків обробки другої та третьої координати утворюють n груп перших та других, третіх та четвертих інформаційних виходів пристрою відповідно, тактові входи цих блоків є тактовими входами пристрою згідно до винаходу додатково введені два елементи АБО та n блоків аналізу часу, причому чотири перших інформаційних входи кожного i - го (i = 1,n) блока аналізу часу з'єднані з i - ю гр упою перших, других, третіх і четвертих інформаційних виходів блока попередження зіткнень повітряних суден, сім груп інформаційних входів якого утворюють сім інформаційних входів пристрою, п'яті, шості та сьомі інформаційні входи n блоків аналізу часу об'єднані відповідно між собою і з'єднані з виходом першого, другого елементів АБО і з восьмим інформаційним входом пристрою відповідно, перший та другий інформаційні виходи i - го (i = 1,n) блоку аналізу часу підключені до i - го входу першого й другого елементів АБО відповідноа перший та другий керуючі входи i - го (i = 1,n) блока аналіза часу підключені відповідно до i - ої групи перших та други х керуючих ви ходів блока попередження зіткнень повітряних суден, тактові входи котрого є тактовими входами пристрою, керуючі виходи n блоків аналізу часу є n ви ходами пристрою. При цьому кожен з n блоків аналізу часу містить чотири ключа, п'ять помножувачів, чотири суматора, два дільники, елемент порівняння, вихід якого є керуючим виходом блока, інформаційні входи першого та другого, третього та четвертого ключів попарно об'єднані між собою і є третім та четвертим інформаційними входами блоку, другий керуючий вхід блоку з'єднаний зі входом другого й третього ключів, виходи яких є першим і другим інформаційними виходами блоку відповідно, перший керуючий вхід блоку підключений до входу першого ключа та четвертого ключа, ви хід якого через послідовно з'єднані третій помножувач, перші суматор та дільник, четвертий суматор підключений до першого входу схеми порівняння, другий вхід схеми порівняння є сьомим інформаційним входом блоку, ви хід першого ключа через послідовно з'єднані п'ятий помножувач, третій суматор, другий дільник підключений до першого входу че твертого суматора, перший інформаційний вхід блока з'єднаний з першим входом третього суматора i першим входом першого помножувача, вихід якого через послідовно з'єднані другий суматор і перший дільник підключений до другого входу п'ятого помножувача, другий інформаційний вхід блоку підключений до другого входу четвертого помножувача, вихід якого з'єднаний з другим входом другого суматора, п'ятий інформаційний вхід блоку з'єднаний з другим входом третього помножувача, першим входом четвертого помножувача і другим входом другого дільника, шостий інформаційний вхід блоку підключений до другого входу першого помножувача і першого входу другого помножувача, вихід якого підключений до першого входу першого суматора, вихід першого ключа з'єднаний з другим входом другого помножувача. На фіг.1 подана структурна схема пристрою для попередження зіткнень повітряних суден; на фіг.2 - функціональна схема i - го блоку аналізу часу; на фіг.3 - функціональна схема блоку попередження зіткнень повітряних суден (прототип по [1]). Пристрій містить блок попередження зіткнень повітряних суден 1, n блоків аналізу часу 2 - 1, ..., 2 - n, перший 3 і другий 4 елементи АБО, першу 5, другу 6, третю 7, четверту 8 - 1, ..., 8 - n, п'яту 9 1, ..., 9 - n, шосту 10 - 1, ..., 10 - n, сьому 11 - 1, 11 2 інформаційну гр упу входів пристрою, тактові 12 1, ..., 12 - n входи пристрою, восьмий 13 інформаційний вхід пристрою, n виходів пристрою 14 - 1, ..., 14 - n. Блок попередження зіткнень повітряних суден 1 призначений для формування інформаційних сигналів про швидкість руху повітряних суден Vxi, Vyi, (i = 1,n) , відстанях DXiN та DYiN між i - м та N - м повітряними судами, що знаходяться у конфлікті за висотою та напрямом руху (курса х), керуючи х сигналів небезпеки Oi для N - го та i - го (i, N 1n; i ¹ N), = , повітряних суден а також керуючого сигналу І, що забезпечує в пристрої вибір i - го блоку аналізу часу 2 - N. Блоки аналізу часу 2 - 1, ..., 2 - n призначені для реалізації етапа точної селекції конфліктуючи х повітряних об'єктів на основі визначення і подальшого аналізу інформації про час прибуття в точк у найбільшого зближення кожного з конфліктуючих суден. Кожен i - й (i = 1,n) блок аналізу часу (фіг.2) містить перший 15 - i, другий 16 - i, третій 17 - i та четвертий 18 - i ключі, перший 19 - i, другий 20 - i, третій 21 - i та четвертий 22 - i помножувачі, перший 23 - i та другий 24 - i суматори, перший дільник 25 - i, п'ятий помножувач 26 - i, третій суматор 27 - i, другий дільник 28 - i, четвертий суматор 29 - i, елемент порівняння 30 - i, перший 31 - i керуючий вхід, третій 32 - i та четвертий 33 - i інформаційні входи, другий керуючий вхід 34 - i, перший 35 - i, шостий 36 - i, п'ятий 37 - i, другий 38 - i та сьомий 39 - i інформаційні входи блоку, перший 40 - i та другий 41 - i інформаційні виходи блоку, 42 - i керуючий вихід блоку. Як блок постійної пам'яті може бути використана мікросхема 556 РТ1. Як помножувач в блоках аналізу часу може бути використана відома мікросхема КР 1802 ВР2. Блок попередження зіткнень повітряних суден містить (фіг.3) перший 43, другий 44, третій 45 регістри, дешифратор 46, n блоків обробки першої координати 47 - 1, ..., 47 - n, n ідентичних блоків обробки другої 48 - 1, ..., 48 - n та n - третьої координати 49 - 1, ..., 49 - n, перший 50 та другий 51 елементи АБО, n елементів І 52 - 1, ..., 52 - n, n блоків аналізу курсу 53 - 1, ..., 53 - n, третій елемент АБО 54, блок постійної пам'яті 55, перший 56 та другий 57 суматори, першу 58, др угу 59, третю 60, четверту 61 - 1, ..., 61 - n, сьому 62 1, 62 - 2, п'яту 63 - 1, ..., 63 - n, шосту 64 - 1, ..., 64 n інформаційні групи входів блоку, тактові входи блока 65 - 1, ..., 65 - n, першу 66 - 1, ..., 66 - n, другу 67 - 1, ..., 67 - n, третю 68 - 1, ..., 68 - n та четверту 69 - 1, ..., 69 - n групи інформаційних виходів блоку, n др уги х 70 - 1, ..., 70 - n та перших 71 - 1, ..., 71 - n керуючи х ви ходів блоку. В якості першого 43, другого 44, третього 45 регістрів може бути використана відома мікросхема К155 ИР1. Ці регістри слугують для приймання й збереження відповідно кодів висоти N - го повітряного судна, припустимої відстані по висоті між повітряними об'єктами ДН та коду номера повітряного об'єкта N. Як дешифратор 46 може бути використана мікросхема ИД7. Блоки обробки першої координати 47 - 1, ..., 47 - n призначені для визначення факту руху повітряних суден у одному ешелоні висоти. Як і в прототипі, кожен з цих блоків складається з регістра, блока віднімання, схеми порівняння, елемента І та елемента НЕ. Блоки обробки другої 48 - 1, ..., 48 - n та третьої 49 - 1, ..., 49 - n координат слугують для перевірки умов на можливість зіткнення повітряних суден по площинним координатам і, як у прототипі, до складу кожного з них входить екстраполятор, два ключа, блок віднімання та елемент порівняння. При цьому за екстраполятор може правити пристрій, відомий по AC №628502, що містить два регістри, блок різниці, реверсивний лічильник, перетворювач код - частота. Блоки аналізу курсу 53 - 1, ..., 53 - n спільно з блоками обробки другої та третьої координат призначені для реалізації етапу грубої селекції конфліктуючи х повітряних суден та формування сигналів небезпеки O1, ..., On. Як і в прототипі, кожен з цих блоків складається з дільника, суматора, двох ключів, двох елементів порівняння та елемента АБО. При цьому як дільники може бути використана відома інтегральна мікросхема КР 1802 ВР2. В якості ключів в блоках обробки другої, третьої координати і ключів в блоках аналізу курсу може бути використана відома мікросхема К 155 КП1. Як елементи порівняння в блоках обробки другої, третьої координат і в блоках аналізу курсу може бути використана відома мікросхема 530 СП1. Блоки віднімання в блоках обробки другої та третьої координати, а також перший та другий суматори й суматори в блоках аналізу курсу можуть бути побудовані на основі відомої мікросхеми К 155 ИМЗ. Розглянемо роботу пристрою (фіг.1). Сигнал небезпеки для N - го та i - го повітряних суден Oi (i = 1,n) формується розробленим пристроєм на i му керуючому виході блока попередження зіткнень повітряних суден 1 аналогічно прототипу у відповідності до виразу. де DH, DY, DX - припустимі безпечні відстані між повітряними судами відповідно по координатам H, Y, X; DHi, DYi, DXi - відстані між i - м і N - м повітряними судами, які визначаються i - ми блоками обробки першої, другої та третьої координати в блоку попередження зіткнень повітряних суден; QNHi, QNBi - верхня та нижня межі діапазону безпечних курсів для i - го повітряного судна відносно курса N - го повітряного судна, що формується i - м блоком аналіза курса в блоці попередження зіткнень повітряних суден; Qi - курс i - го повітряного судна, який визначається i - м блоком аналіза курса: Робота розробленого пристрою відрізняється від роботи прототипу тільки введенням додаткової перевірки за часом прибуття в точку найбільшого зближення повітряних суден, які порушили припустиму відстань між собою одночасно по трьом просторовим координатам X, Y та H і мають небезпечний напрям руху одне відносно одного (i - х повітряних суден, що пройшли етап грубої селекції й для яких сигнал небезпеки Oi на виході блоку попередження зіткнень повітряних суден 1 набув одиничного значення). При цьому сигнал Oi надходить на перший керуючий вхід блока аналіза часу 2 - i, який, по-перше, визначає час прильоту в точку найбільшого зближення i - го та N - го конфліктуючи х повітряних суден (час ti та tN (у відповідності до виразів (3) і (4), що є результатом розв'язку лінійної системи рівнянь (2): звідки де DXiN, DYiN - різниці в координатах між положенням i - го та N - го повітряних суден в момент надходження сигналу Oi, що формуються на i - х вихода х першої та другої груп інформаційних ви ходів блока попередження зіткнень повітряних суден 1; VXi, VYi, VXN , VYN - складові швидкостей i - го та N - го повітряних суден, що формуються на відповідних виходах третьої та четвертої груп інформаційних ви ходів блока попередження зіткнень повітряних суден 1; по-друге, блоком аналіза часу 2 - i обчислюється різниця часу Dt i яка потім порівнюється з кодом припустимого значення tg , що надходить з восьмого 13 інформаційного входу пристрою на сьомий вхід блока 2 - i; де tg визначається мінімально необхідним часомдля виконання маневру розходження повітряним судном у вертикальній площині [2]. У випадку виконання умови (6) на виході 14 - i пристрою буде сформований сигнал небезпеки Oii. Розглянемо більш детально роботу i - го блоку аналізу часу (фіг.2). З третього 32 - i та четвертого 33 - i інформаційних входів блоку на інформаційні входи першого 15 - i та другого 16 - i, третього 17 - i та четвертого 18 - i ключів відповідно надходять складові швидкості руху i - го повітряного судна VXi і VYi, які потім через другий 16 - i та третій 17 - i ключі далі надходять на перший 40 - i та другий 41 - i інформаційні виходи блоку. Управління ключами здійснюється сигналом небезпеки Oi та сигналом i, що надходять відповідно з першого 31 - i і другого 34 - i керуючих входів блоку на входи відповідних ключів. Одночасно на перший 35 - i, другий 38 - i, п'ятий 37 - i, шостий 36 - i і сьомий 39 - i інформаційні входи блока відповідно надходять коди DXiN, DYiN, VYN і tg . При цьому на виходах першого 19 - i, другого 20 - i, третього 21 - i і четвертого 22 - i помножувачів формуються коди добутків DXiN VYN, VYN VXi , VXN VYi і DYiN DVXN, які потім надходять на відповідні входи першого 23 - i та другого 24 - i суматорів. На виході першого 23 - i та другого 24 - i суматорів відповідно формуються код дільника (VYN VXi - VXN VYi), та код діленого (DYiNVXN - DXiN VYN)які надходять на другий та перший вхід першого 25 - i дільника. На виході першого 25 - i дільника у відповідності до виразу (3) формується код часу ti, який потім надходить на другі входи четвертого 29 - i суматора і п'ятого 26 - i помножувача. П'ятий 26 - i помножувач, третій 27 - i суматор та другий 28 - i дільник забезпечують визначення кода часу tN у відповідності з виразом (4), який з вихода другого 28 - i дільника надходить на перший вхід четвертого суматора 29 - i. При цьому на виході четвертого 29 - i суматора формується код різниці Dti = tN - ti, який надходить на перший вхід елемента порівняння 30 - i. У випадку виконання умови (6) на виході елемента порівняння формується сигнал небезпеки Oii, який надходить на керуючий вихід блока 42 - i. Оцінимо техніко-економічну ефективність пропонованого пристрою у порівнянні з прототипом. Підвищення функціональної надійності пристрою, що полягає у зменшенні ймовірності хибної тривоги при визначенні факта можливого зіткнення повітряних суден, у розробленому пристрої в порівнянні з прототипом можна оцінити у відповідності до наступного виразу, де Dtpi, Dt ni - різниці часів прибуття в точку найбільного зближення i - го та N - го повітряних суден, що визначаються відповідно розробленим пристроєм та прототипом. Оскільки в прототипі конфліктна ситуація оцінюється тільки за інформацією просторового положення повітряних суден одне відносно одного та гр убої інформації про взаємний напрямок їхнього руху (курсів) і при цьому не враховується інформація про час прибуття кожним з конфліктуючи х суден в точку їх найбільшого зближення, то значення Dtni = 0 і вираз (7) набуде вигляду Величина tg задається відповідними нормативними документами і дорівнює 20с [2]. Як випливає з (3) - (5), значення Dti залежить як від просторових координат руху конфліктуючи х суден, так і від параметрів їх р уху і при буде дорівнювати В цьому випадку коефіцієнт підвищення функціональної надійності розробленого пристрою у порівнянні з прототипом буде дорівнювати В середньому від розробленого пристрою очікується підвищення функціональної надійності пристрою (зменшення ймовірності хибної триврги при визначенні конфліктних ситуацій (у порівнянні з прототипом на 5 - 10%.
ДивитисяДодаткова інформація
Автори англійськоюBiletskyi Anatolii Yakovych
Автори російськоюБилецкий Анатолий Яковлевич
МПК / Мітки
МПК: G06F 15/17
Мітки: попередження, суден, пристрій, повітряних, зіткнень
Код посилання
<a href="https://ua.patents.su/5-25757-pristrijj-dlya-poperedzhennya-zitknen-povitryanikh-suden.html" target="_blank" rel="follow" title="База патентів України">Пристрій для попередження зіткнень повітряних суден</a>
Пристрій для попередження зіткнень літальних апаратів
Номер патенту: 1802
Опубліковано: 25.10.1994
Автор: Горенюк Віктор Васильович
МПК: G08G 5/00
Мітки: літальних, пристрій, зіткнень, апаратів, попередження
Формула / Реферат:
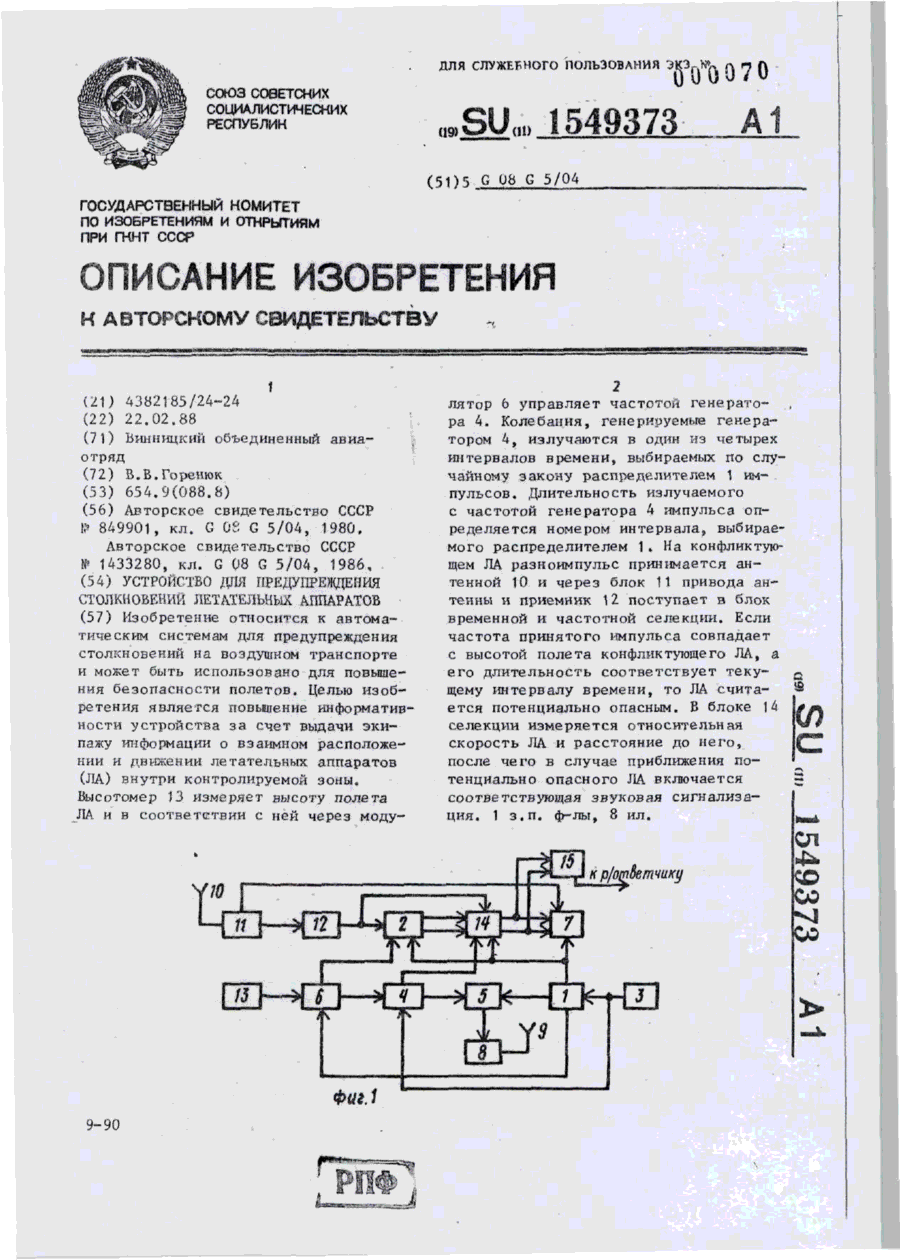
1. Устройство для предупреждения столкновений летательных аппаратов, содержащее высотомер, выход которого соединен с информационным входом модулятора, первый выход которого подключен ко входу управления генератора несущей частоты, первый выход которого соединен с информационным входом манипулятора, выход которого через усилитель подключен ко входу передающей антенны, генератор опорной частоты, выход которого соединен со входом...
Пристрій для вивантажування насипного вантажу з суден
Номер патенту: 2567
Опубліковано: 26.12.1994
Автори: Юріє Олсоні, Пентті Вялімякі
МПК: B65G 67/00
Мітки: суден, пристрій, насипного, вантажу, вивантажування
Формула / Реферат:
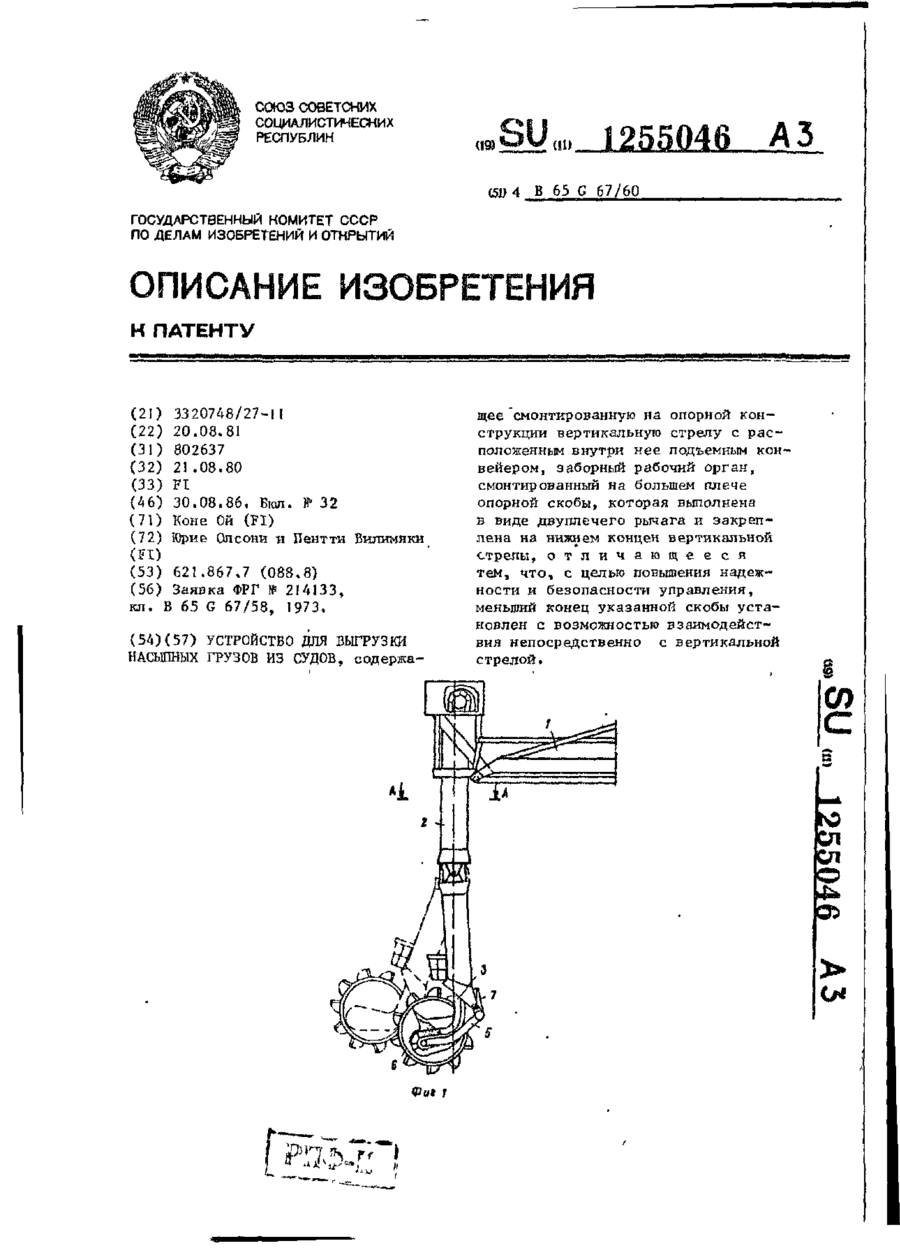
Устройство для выгрузки насыпных грузов из судов, содержащее смонтированную на опорной конструкции вертикальную стрелу с расположенным внутри нее подъемным конвейером, заборный рабочий орган, смонтированный на большем плече опорной скобы, которая выполнена в виде двуплечего рычага и закреплена на нижнем конце вертикальной стрелы, отличающееся тем, что, с целью повышения надежности и безопасности управления, меньший конец указанной скобы...
Пристрій для гасіння пожеж у герметичних приміщеннях кораблів та суден
Номер патенту: 24914
Опубліковано: 06.10.1998
Автори: Крастельов Михайло Михайлович, Василенко Андрій Миколайович, Куріпко Олег Васильович
МПК: A62C 2/00
Мітки: суден, пожеж, приміщеннях, гасіння, пристрій, кораблів, герметичних
Формула / Реферат:
Устройство для тушения пожаров в герметичных помещениях кораблей и судов, содержащее осесимметричный корпус с входной и выходной частью, многоструйную форсунку, установленную соосно корпусу, устройство подачи рабочей жидкости под давлением и трубопровод рабочей жидкости, отличающееся тем, что выходная часть корпуса оснащена коллектором, размещенным по периметру в нижней части защищаемого объекта, и форсунками для вывода инертной газовоздушной...
Пристрій корекції амплітуд імпульсів
Номер патенту: 22369
Опубліковано: 03.03.1998
Автори: Погрібний Володимир Олександрович, Таянов Сергій Анатолійович, Рожанківський Ігор Володимирович
МПК: G01R 29/02
Мітки: імпульсів, амплітуд, корекції, пристрій
Формула / Реферат:
Пристрій корекції амплітуд Імпульсів, що містить блок віднімання та перший одновібратор, який відрізняється тим, що в нього введені піковий детектор, визначник мінімуму, два компаратори, другий одновібратор та формувач Імпульсів, причому вихід пікового детектора з'єднаний з першим входом першого компаратора, другим входом формувача Імпульсів та другим входом блоку віднімання, вихід якого є виходом пристрою, вихід першого компаратора з'єднаний...
Пристрій формування значень тригонометричних функцій для цифрового аналізатора спектра
Номер патенту: 25782
Опубліковано: 30.10.1998
Автори: Процько Ігор Омельянович, Рашкевич Юрій Михайлович
МПК: G06F 15/00, G01R 23/16
Мітки: цифрового, спектра, пристрій, функцій, аналізатора, формування, значень, тригонометричних
Формула / Реферат:
Пристрій формування значень тригонометричних функцій для цифрового аналізатора спектра, що містить блок завдання постійних кодів, вихід якого з'єднаний з входами установки регістрів і входом блоку перемноження, другий вхід якого з'єднаний з виходом першого регістра, а вихід блоку перемноження з'єднаний з першим входом суматора, вихід якого підключений до входу першого регістра, вихід останнього з'єднаний з входом другого регістра, який...
Попередній патент: Штифтовий зуб
Наступний патент: Лазерний віддалемір
Випадковий патент: Пристрій для здійснення ударно-розвантажувальної дії на продуктивний гірничий масив