Судновий інклінограф


Формула / Реферат
1. Судновий інклінограф, який містить маятник у вигляді вантажу, підвішеного на осі і розміщеного на стійці, який відрізняється тим, що на осі встановлені датчики кутового відхилення, підключені до електронно-обчислювального блока, який містить перетворювачі, обчислювачі.
2. Інклінограф за п. 1, який відрізняється тим, що для відображення інформації використано дисплей.
3. Інклінограф за п. 1, який відрізняється тим, що для перетворення показників, які були визначені за допомогою датчиків кутового відхилення, використано аналого-цифровий перетворювач.
4. Інклінограф за п. 1, який відрізняється тим, що вісь, на якій підвішений вантаж маятника, виконано у вигляді циліндра, встановленого в підшипниках.
Текст
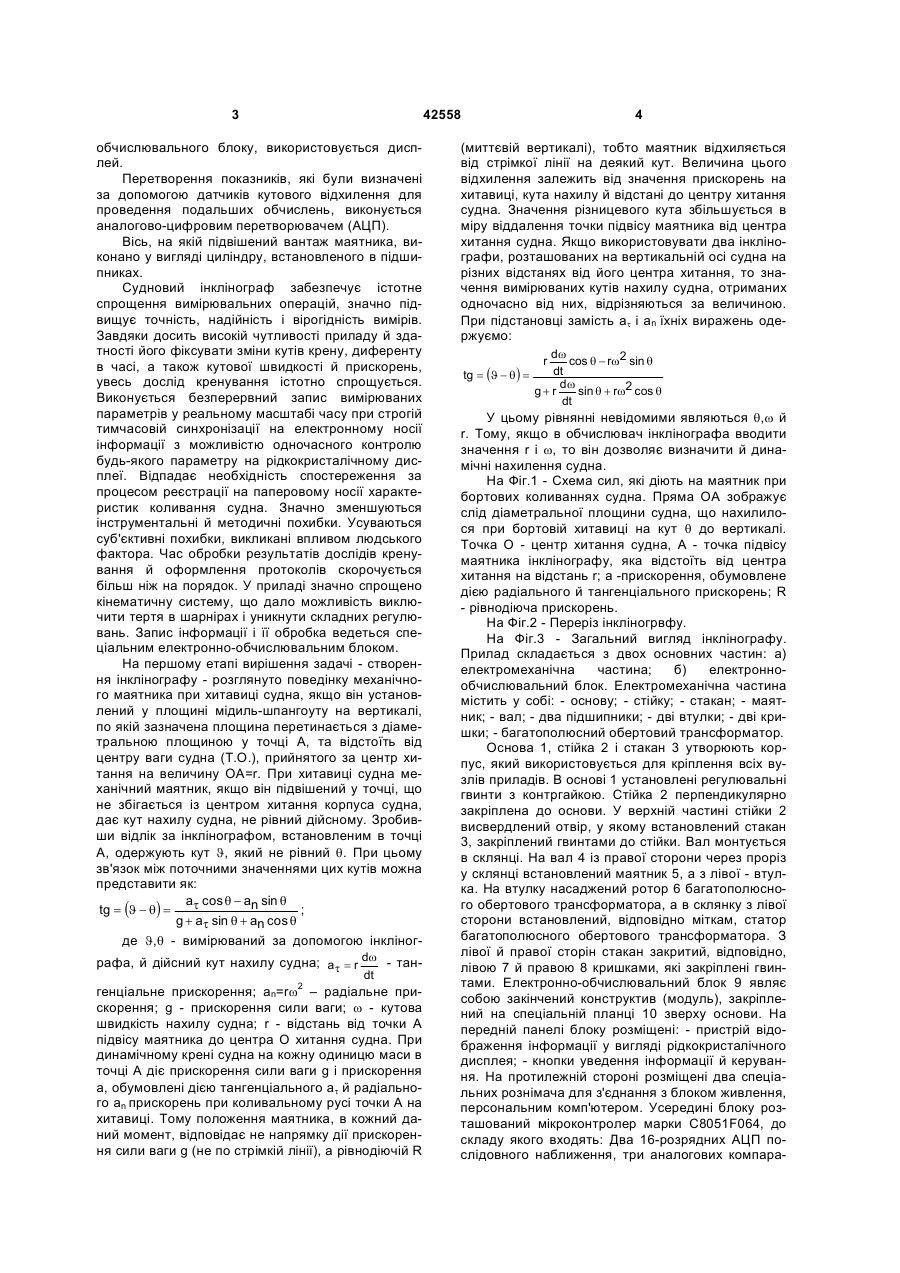
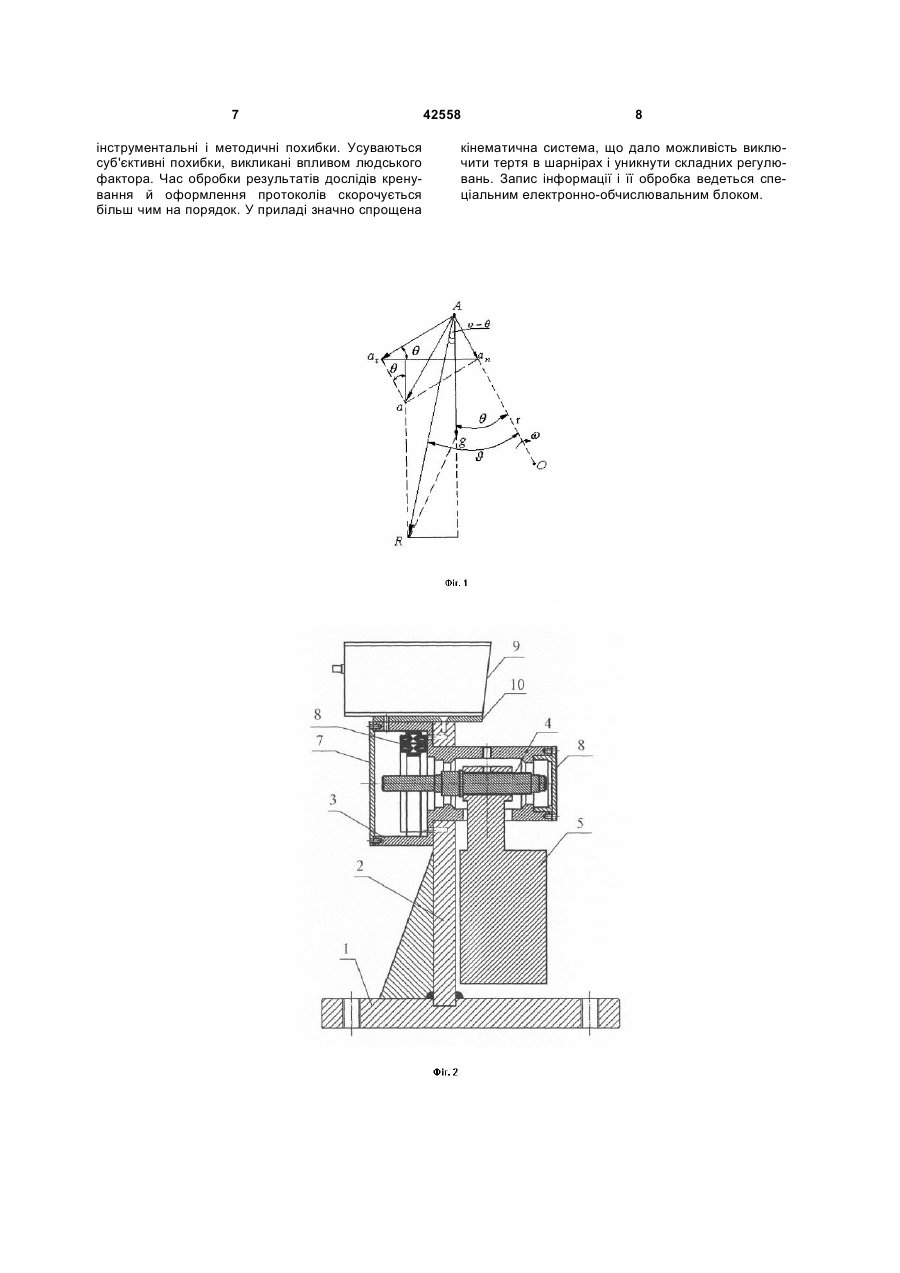
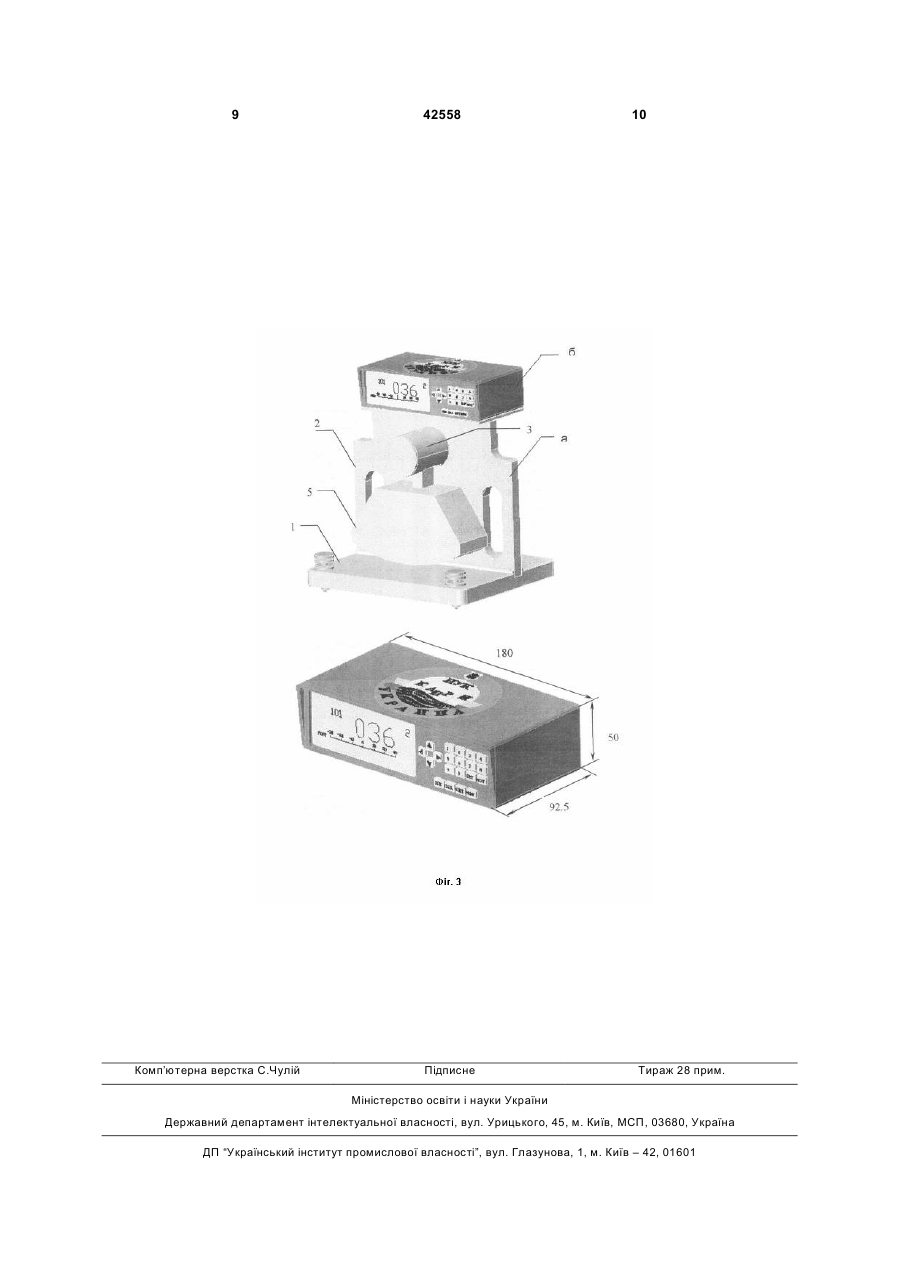
1. Судновий інклінограф, який містить маятник у вигляді вантажу, підвішеного на осі і розміщеного на стійці, який відрізняється тим, що на осі встановлені датчики кутового відхилення, підключені до електронно-обчислювального блока, який містить перетворювачі, обчислювачі. 3 42558 обчислювального блоку, використовується дисплей. Перетворення показників, які були визначені за допомогою датчиків кутового відхилення для проведення подальших обчислень, виконується аналогово-цифровим перетворювачем (АЦП). Вісь, на якій підвішений вантаж маятника, виконано у вигляді циліндру, встановленого в підшипниках. Судновий інклінограф забезпечує істотне спрощення вимірювальних операцій, значно підвищує точність, надійність і вірогідність вимірів. Завдяки досить високій чутливості приладу й здатності його фіксувати зміни кутів крену, диференту в часі, а також кутової швидкості й прискорень, увесь дослід кренування істотно спрощується. Виконується безперервний запис вимірюваних параметрів у реальному масштабі часу при строгій тимчасовій синхронізації на електронному носії інформації з можливістю одночасного контролю будь-якого параметру на рідкокристалічному дисплеї. Відпадає необхідність спостереження за процесом реєстрації на паперовому носії характеристик коливання судна. Значно зменшуються інструментальні й методичні похибки. Усуваються суб'єктивні похибки, викликані впливом людського фактора. Час обробки результатів дослідів кренування й оформлення протоколів скорочується більш ніж на порядок. У приладі значно спрощено кінематичну систему, що дало можливість виключити тертя в шарнірах і уникнути складних регулювань. Запис інформації і її обробка ведеться спеціальним електронно-обчислювальним блоком. На першому етапі вирішення задачі - створення інклінографу - розглянуто поведінку механічного маятника при хитавиці судна, якщо він установлений у площині мідиль-шпангоуту на вертикалі, по якій зазначена площина перетинається з діаметральною площиною у точці А, та відстоїть від центру ваги судна (Т.О.), прийнятого за центр хитання на величину ОА=r. При хитавиці судна механічний маятник, якщо він підвішений у точці, що не збігається із центром хитання корпуса судна, дає кут нахилу судна, не рівний дійсному. Зробивши відлік за інклінографом, встановленим в точці А, одержують кут J, який не рівний q. При цьому зв'язок між поточними значеннями цих кутів можна представити як: at cos q - an sin q tg = (J - q) = ; g + at sin q + an cos q де J,q - вимірюваний за допомогою інклінографа, й дійсний кут нахилу судна; a t = r dw - танdt генціальне прискорення; аn=rw2 – радіальне прискорення; g - прискорення сили ваги; w - кутова швидкість нахилу судна; r - відстань від точки А підвісу маятника до центра О хитання судна. При динамічному крені судна на кожну одиницю маси в точці А діє прискорення сили ваги g і прискорення а, обумовлені дією тангенціального аt й радіального аn прискорень при коливальному русі точки А на хитавиці. Тому положення маятника, в кожний даний момент, відповідає не напрямку дії прискорення сили ваги g (не по стрімкій лінії), а рівнодіючій R 4 (миттєвій вертикалі), тобто маятник відхиляється від стрімкої лінії на деякий кут. Величина цього відхилення залежить від значення прискорень на хитавиці, кута нахилу й відстані до центру хитання судна. Значення різницевого кута збільшується в міру віддалення точки підвісу маятника від центра хитання судна. Якщо використовувати два інклінографи, розташованих на вертикальній осі судна на різних відстанях від його центра хитання, то значення вимірюваних кутів нахилу судна, отриманих одночасно від них, відрізняються за величиною. При підстановці замість аt і аn їхніх виражень одержуємо: tg = (J - q ) = dw cos q - rw2 sin q dt dw sin q + rw2 cos q g+r dt r У цьому рівнянні невідомими являються q,w й r. Тому, якщо в обчислювач інклінографа вводити значення r і w, то він дозволяє визначити й динамічні нахилення судна. На Фіг.1 - Схема сил, які діють на маятник при бортових коливаннях судна. Пряма ОА зображує слід діаметральної площини судна, що нахилилося при бортовій хитавиці на кут q до вертикалі. Точка О - центр хитання судна, А - точка підвісу маятника інклінографу, яка відстоїть від центра хитання на відстань r; а -прискорення, обумовлене дією радіального й тангенціального прискорень; R - рівнодіюча прискорень. На Фіг.2 - Переріз інкліногрвфу. На Фіг.3 - Загальний вигляд інклінографу. Прилад складається з двох основних частин: а) електромеханічна частина; б) електроннообчислювальний блок. Електромеханічна частина містить у собі: - основу; - стійку; - стакан; - маятник; - вал; - два підшипники; - дві втулки; - дві кришки; - багатополюсний обертовий трансформатор. Основа 1, стійка 2 і стакан 3 утворюють корпус, який використовується для кріплення всіх вузлів приладів. В основі 1 установлені регулювальні гвинти з контргайкою. Стійка 2 перпендикулярно закріплена до основи. У верхній частині стійки 2 висвердлений отвір, у якому встановлений стакан 3, закріплений гвинтами до стійки. Вал монтується в склянці. На вал 4 із правої сторони через проріз у склянці встановлений маятник 5, а з лівої - втулка. На втулку насаджений ротор 6 багатополюсного обертового трансформатора, а в склянку з лівої сторони встановлений, відповідно міткам, статор багатополюсного обертового трансформатора. З лівої й правої сторін стакан закритий, відповідно, лівою 7 й правою 8 кришками, які закріплені гвинтами. Електронно-обчислювальний блок 9 являє собою закінчений конструктив (модуль), закріплений на спеціальній планці 10 зверху основи. На передній панелі блоку розміщені: - пристрій відображення інформації у вигляді рідкокристалічного дисплея; - кнопки уведення інформації й керування. На протилежній стороні розміщені два спеціальних рознімача для з'єднання з блоком живлення, персональним комп'ютером. Усередині блоку розташований мікроконтролер марки C8051F064, до складу якого входять: Два 16-розрядних АЦП послідовного наближення, три аналогових компара 5 тори, джерело опорної напруги, прецизійна схема слідкування за напругою живлення/детектор зниження напруги живлення, процесорне ядро СІР-51, пам'ять, цифрові периферійні модулі (16 розрядні таймери - лічильники), джерела тактових імпульсів; - аналоговий фільтр який може бути побудований на прецизійних операційних підсилювачах фірми AD марки ОР727 або звукового кодека фірми Silsbs C3000, з вихідним фільтром 5-го порядку, рівнем живлення 3,3В. Габаритні розміри електронно-обчислювального блоку 180´92,5´50мм (див. Фіг.3). Принцип роботи інклінографу полягає в тому, що при відхиленні судна на певний кут крену, короткоперіодичний маятник інклінографу виявиться відхиленим на те ж значення кута відносно основи, тому, що маятник жорстко пов'язаний з валом, а той у свою чергу - з ротором багатополюсного обертового трансформатора (ОТ), то кут обертання ротора, відносно його статора, буде рівнозначний куту крену судна. Сигнал із ОТ надходить в електронно-обчислювальний блок. Особливістю роботи електронно-обчислювального блоку є те, що сигнали виходів обмоток грубого й точного відліку подаються на два 16 розрядних АЦП послідовного наближення. АЦП мають нелінійність перетворення ±0,75 молодшого значущого розряду та програмовану швидкість перетворення до 1млн. перетворень у секунду. Оцифровка стану кожної інформаційної обмотки (синусної й косинусної) проводиться із частотою 8кГц (згідно теореми Котельникова). Обмотка компенсації квадратичної похибки (квадратурна обмотка) замикається сама на себе для компенсації квадратичної похибки. Зміна обгинаючої амплітуди вихідної модульованої напруги на обмотках грубого відліку, при повороті на кут 360 градусів, відбувається один раз (за період повороту ротора). Зміна обгинаючої амплітуди модульованої напруги на обмотках точного відліку виробляється 16 разів за одне обгинання ротора ОТ. Завдяки цьому кінцеве значення кута, з точністю до 18 кутових секунд, можливо одержати в результаті аналізу відразу двох відліків: грубого й точного. Використання тільки обмоток грубого відліку дає точність 30 кутових хвилин. Для одержання значення кута повороту застосовуємо два алгоритми: - табличний метод одержання кута й значення тангенса; - ітераційний алгоритм Волдера (або Меджетта). Відношення значення напруги на синусній обмотці до косинусної дає значення тангенса кута повороту. Якщо заздалегідь обчислити значення кута для різних значень тангенса й створити таблицю, де порядковим номером буде значення тангенса кута, а відповідним елементом таблиці (масиву) буде саме значення кута, то це буде дуже швидкий табличний алгоритм із мінімальними обчислювальними витратами. Але при значеннях кута, близьких до 90 градусів (асимптоті тангенса) і близьких до нуля, значення кута буде отримано з більшими похибками (це пов'язано з кінцевим поданням числа в розрядній сітці). Тому цей алгоритм не зручний для рішення поставленого завдання. Алгоритм Волдера - ітераційний та більш прогресивний. Цей алгоритм належить до методів обчислення значень "цифра за цифрою". 42558 6 Точність отриманого значення визначається кількістю ітерацій (на одну ітерацію доводиться один двійковий розряд). Метод "цифра за цифрою" у геометричному змісті є послідовність перетворень вектора на стандартні кути, тобто послідовність поворотів радіус-вектора на стандартні кути навколо початку координат з одночасною зміною довжини вектора. Для обчислення функції æy ö arctgç 0 ÷ вихідний вектор R0(x0,y0) повертається çx ÷ è 0ø на стандартні кути таким чином, щоб "покласти" підсумковий вектор Rn на вісь абсцис. Коли це досягнуто, то накопичена до кінця алгоритму алгеæ ö браїчна сума кутів поворотів дорівнює arctgç y0 ÷ . çx ÷ è 0ø Обчислення проводять за формулами: yi +1 = yi - xixi 2-i; ü ï xi +1 = xi + xiyi 2- i; ï ý ji +1 = ji + xiarctg2- i;ï ï signxi = signyi þ æ ö У підсумку одержуємо кут jn = arctgç y0 ÷ . Для çx ÷ è 0ø того, щоб вектор у процесі таких поворотів наближався до необхідного положення, обумовленого j, необхідно повертати його на кожному кроці по (або проти) годинниковій стрілці, залежно від того, чи є поточний кут нахилом вектора до осі абсцис більше або менше аргументу j, тобто xi=±1 чергового кута повороту, вибирається з умови signxi=signyi Для точного визначення значень кута проводиться цифрова обробка оцифрованих сигналів за допомогою віконної фільтрації й нормалізації (використання заздалегідь відомих табличних значень синуса й косинуса, отриманих при обробці). Обчислені миттєві значення кутів передаються по інтерфейсу RS - 232 у персональний комп'ютер для наступної обробки, збереження й видачі результату досліду. Виходячи з аналізу поводження маятника, встановленого в будь-якій точці судна, отримано залежності, що дозволяють визначити дійсний кут нахилу судна, як на тихій воді так і при хитавиці. Розроблений зовсім новий прилад, у якому на порядок підвищена чутливість, що дає можливість проводити дослід кренування при малих нахиленнях судна. У порівнянні з прототипом автоматизується процес вимірювання операцій, значно підвищується точність, надійність і вірогідність вимірів. Завдяки досить високій чутливості приладу і здатності його фіксувати зміни кута крену, диференту в часі, а так само кутової швидкості і прискорень, весь дослід кренування істотно спрощується. Вага переміщуваного вантажу може бути істотно зменшена. Виробляється безупинний запис вимірювальних параметрів у реальному масштабі часу, при строгій тимчасовій синхронізації на електронному носії інформації з можливістю одночасного контролю будь-якого параметру - на рідкокристалічному дисплеї, відпадає необхідність спостереження за процесом реєстрації на паперовому носії характеристик коливання судна. Значно зменшуються 7 інструментальні і методичні похибки. Усуваються суб'єктивні похибки, викликані впливом людського фактора. Час обробки результатів дослідів кренування й оформлення протоколів скорочується більш чим на порядок. У приладі значно спрощена 42558 8 кінематична система, що дало можливість виключити тертя в шарнірах і уникнути складних регулювань. Запис інформації і її обробка ведеться спеціальним електронно-обчислювальним блоком. 9 Комп’ютерна верстка C.Чулій 42558 Підписне 10 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюShip inclinograph
Автори англійськоюSnihur Anatolii Kyrylovych
Назва патенту російськоюСудовой инклинограф
Автори російськоюСнигур Анатолий Кириллович
МПК / Мітки
МПК: G01C 1/00
Мітки: судновий, інклінограф
Код посилання
<a href="https://ua.patents.su/5-42558-sudnovijj-inklinograf.html" target="_blank" rel="follow" title="База патентів України">Судновий інклінограф</a>
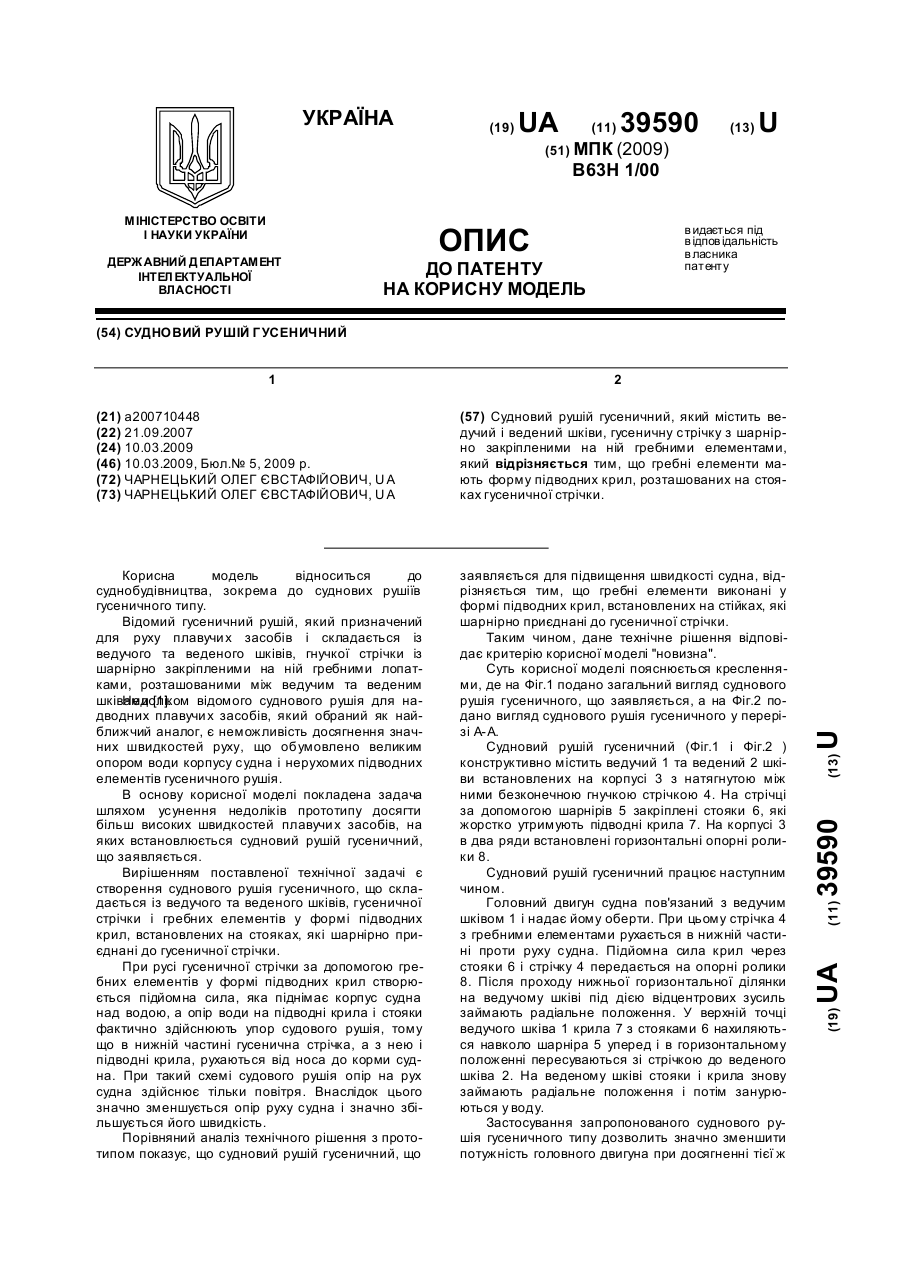
Судновий рушій гусеничний
Номер патенту: 39590
Опубліковано: 10.03.2009
Автор: Чарнецький Олег Євстафійович
МПК: B63H 1/00
Мітки: гусеничний, рушій, судновий
Формула / Реферат:
Судновий рушій гусеничний, який містить ведучий і ведений шківи, гусеничну стрічку з шарнірно закріпленими на ній гребними елементами, який відрізняється тим, що гребні елементи мають форму підводних крил, розташованих на стояках гусеничної стрічки.
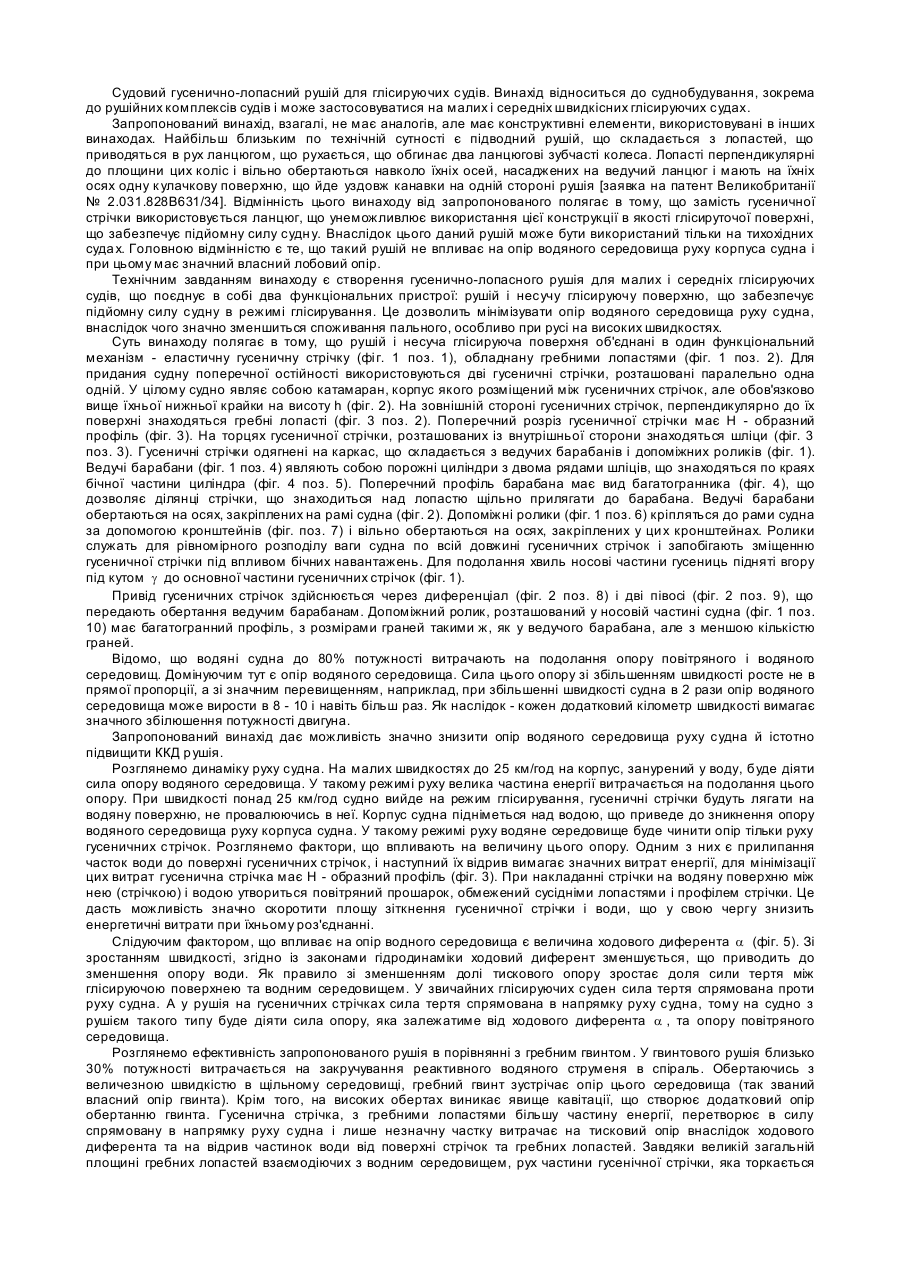
Судновий гусенично-лопатевий рушій
Номер патенту: 74030
Опубліковано: 17.10.2005
Автори: Белінський Едуард Валерійович, Агризько Володимир Валерійович
МПК: B63H 1/34
Мітки: рушій, гусенично-лопатевий, судновий
Формула / Реферат:
Судновий гусенично-лопатевий рушій, що складається з двох суцільно розташованих, паралельних одна до одної, гусеничних стрічок, кожна з яких насаджена на допоміжні ролики та ведучі барабани, які з’єднані півосями з диференціалом, який відрізняється тим, що кожна з гусеничних стрічок має Н – подібний профіль та обладнана гребними лопатями, розташованими на її зовнішній поверхні перпендикулярно до неї.
Судновий гусенично-лопатевий рушій
Номер патенту: 12300
Опубліковано: 16.01.2006
Автори: Агризько Володимир Валерійович, Белінський Едуард Валерійович, Стемпень Віктор
МПК: B63H 1/34
Мітки: судновий, гусенично-лопатевий, рушій
Формула / Реферат:
1. Судновий гусенично-лопатевий рушій, що складається з двох суцільних розташованих паралельно одна до одної гусеничних стрічок, кожна з яких насаджена на барабани, один з яких ведучий - призначений для з'єднання півосями з диференціалом, який кінематично з'єднаний з двигуном, а кожна із згаданих стрічок обладнана розташованими на її зовнішній поверхні гребними лопатями, який відрізняється тим, що гребні лопаті на зовнішній поверхні кожної із...
Судновий напівзанурений рушій
Номер патенту: 19663
Опубліковано: 25.12.1997
Автор: Слинько Петро Петрович
Мітки: судновий, рушій, напівзанурений
Формула / Реферат:
1. Судовой полупогружной движитель, содержащий гребной вал, размещенный под углом к продольной вертикальной плоскости судна, с полупогружными гребными лопастями, размещенными с возможностью изменения положения по отношению к продольной вертикальной плоскости и/или к основной плоскости судна, отличающийся тем, что при входе в воду нагнетающая сторона каждой лопасти расположена по существу перпендикулярно продольной вертикальной плоскости...
Гідрореактивний судновий двигун
Номер патенту: 18438
Опубліковано: 15.11.2006
Автори: Багненко Михайло Юрійович, Маханько Олександр Васильович, Ткаченко Станіслав Григорович, Самохвалов Віктор Сергійович, Цвікліс Володимир Станіславович
МПК: B63H 11/00
Мітки: двигун, гідрореактивний, судновий
Формула / Реферат:
1. Гідрореактивний судновий двигун, що містить послідовно розташовані водогін з водозабірником та дифузором, систему підготовки стиснутого газу, яка виконана у вигляді генератора стиснутого газу, оснащеного впускним керованим імпульсним клапаном, що з'єднує його з водогоном, і який також містить впускний відсічний клапан, встановлений на водозабірнику, який відрізняється тим, що в системі підготовки стиснутого газу встановлено кулісні...
Попередній патент: Гаситель морських хвиль
Наступний патент: Термоелектричний датчик теплового потоку
Випадковий патент: Апарат для очищення стічних вод з насадкою