Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ла
Номер патенту: 51059
Опубліковано: 25.06.2010
Автори: Рисований Олександр Миколайович, Пашков Дмитро Павлович, Воробйов Руслан Володимирович, Клівець Сергій Іванович, Макаров Сергій Анатолійович, Коломійцев Олексій Володимирович, Васильєв Дмитро Геннадійович, Болюбаш Олексій Олексійович, Сідченко Сергій Олександрович, Висоцький Олег Володимирович
Формула / Реферат
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми "і", реверсивні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину та ![]() - введення опорних сигналів з частотами міжмодових биттів
- введення опорних сигналів з частотами міжмодових биттів ![]() від лазера, що передає, який відрізняється тим, що після Лн додатково введено модифікований селектор подовжніх мод, а також введено багатофункціональний інформаційний блок із б - введенням сигналу тангенціальної складової швидкості (кутових швидкостей) літального апарата (ЛА), що виміряна, для інформаційного взаємозв'язку з ЛА та, в разі необхідності, його розпізнавання.
від лазера, що передає, який відрізняється тим, що після Лн додатково введено модифікований селектор подовжніх мод, а також введено багатофункціональний інформаційний блок із б - введенням сигналу тангенціальної складової швидкості (кутових швидкостей) літального апарата (ЛА), що виміряна, для інформаційного взаємозв'язку з ЛА та, в разі необхідності, його розпізнавання.
Текст
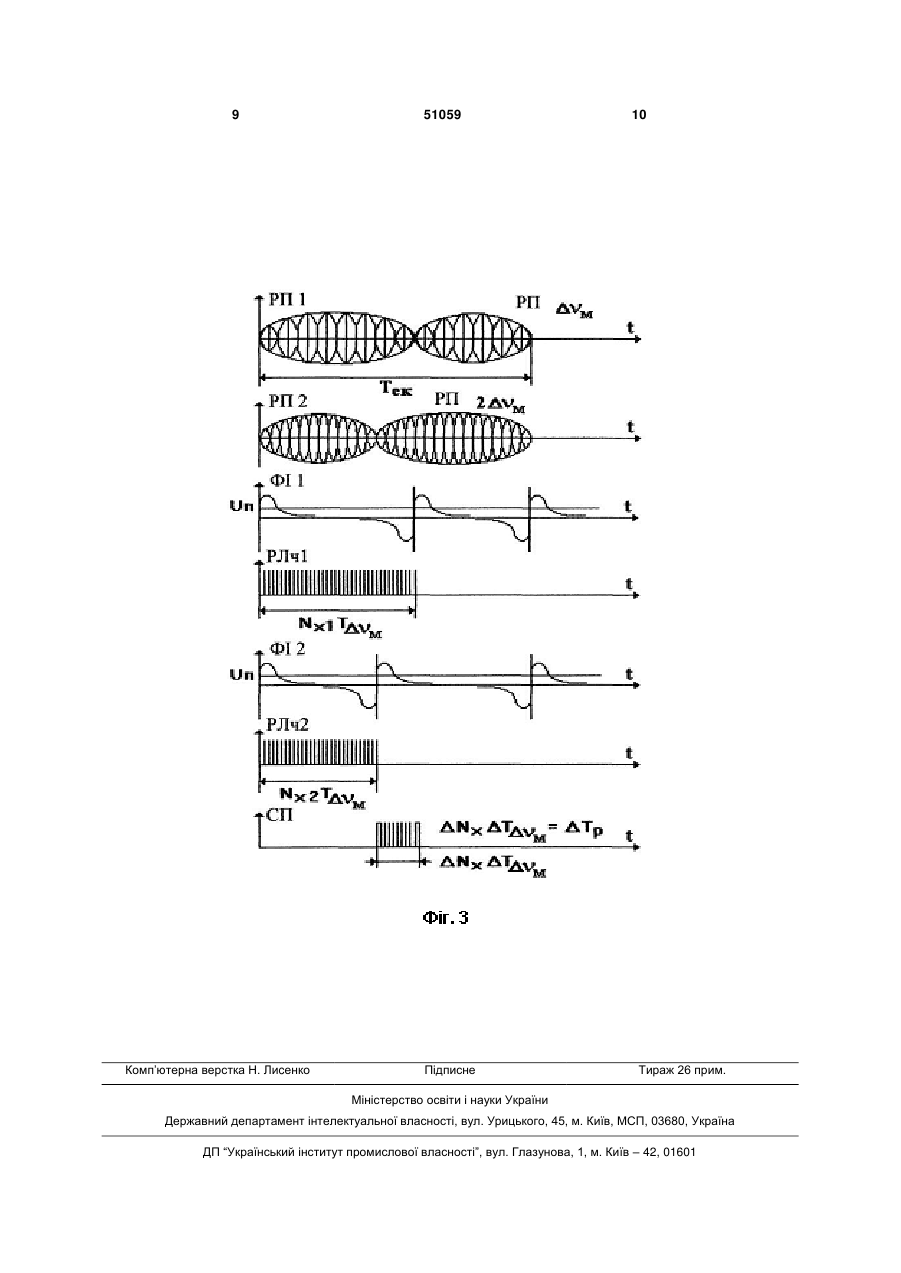
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми "і", реверсивні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину та м оп - введення опорних сигналів з Запропонована корисна модель відноситься до галузі електрозв'язку і може бути використана для синтезу лазерної інформаційно-вимірювальної системи (ЛІВС) з модернізованим частотночасовим методом вимірювання (МЧЧМВ). Відомий «Канал вимірювання кутових швидкостей літальних апаратів для лазерної інформаційно-вимірювальної системи» [1], який містить керуючий елемент (КЕ), блок керування дефлекторами (БКД), лазер з накачкою (Лн), селектор подовжніх мод (СПМ), блок дефлекторів (БД), передаючу оптику (ПРДО), приймаючу оптику (ПРМО), фотодетектор (ФТД), широкосмуговий підсилювач (ШП), інформаційний блок (ІБ), резонансні підсилювачі (РП), настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери „1"|„0", схеми „і" («І»), реверсивні лічильники (РЛч), схеми порівняння (СП), електронно-цифрову обчислювальну машину (ЕЦОМ) та - введення опорних м оп сигналів ( м оп , 2 м оп , 3 міжмодових м оп , 6 м оп ) биттів від лазера, передає. Недоліком відомого каналу є те, що він не здійснює інформаційного взаємозв'язку з ЛА на несучих частотах n та додаткового сканування сумарною діаграмою спрямованості (ДС) лазерного випромінювання. Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є «Канал вимірювання кутових швидкостей літальних апаратів з додатковим скануванням» [2], який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, багатоканальний селектор подовжніх мод (БСПМ), модифікований блок дефлекторів (МБД), передаючу оптику, приймаючу оптику, фотодетектор, широкосмуговий підсилювач, інформаційний блок, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, (11) міжмодових биттів ) від лазера, що м оп UA частотами , 3 м оп , 6 м оп (19) з 51059 (13) що передає, який відрізняється тим, що після Лн додатково введено модифікований селектор подовжніх мод, а також введено багатофункціональний інформаційний блок із б введенням сигналу тангенціальної складової швидкості (кутових швидкостей) літального апарата (ЛА), що виміряна, для інформаційного взаємозв'язку з ЛА та, в разі необхідності, його розпізнавання. U частотами ( м оп , 2 3 51059 формувачі імпульсів, тригери „1"|„0", схеми „і", реверсивні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину та м оп введення частотами» ( м оп , 2 опорних міжмодових м оп , 3 м оп , 6 сигналів з биттів м оп ) від лазера, що передає. Недоліком каналу-прототипу є те, що він не може розпізнавати ЛА. В основу корисної моделі поставлена задача створити канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА, який дозволить виявляти ЛА та одночасно при високоточному вимірюванні кутових швидкостей (прискорення ' і ') у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, здійснювати багатоканальний (N) інформаційний взаємозв'язок з ЛА тільки на несучих частотах n , та в разі необхідності, його розпізнавати. Поставлена задача вирішується за рахунок того, що у канал-прототип [2], який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, багатоканальний селектор подовжніх мод, модифікований блок дефлекторів, передаючу оптику, приймаючу оптику, фотодетектор, широкосмуговий підсилювач, інформаційний блок, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери „1"|„0", схеми „і", реверсивні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину та м оп - введення опорних сигналів з частотами міжмодових ( м оп , 2 биттів м оп , 3 м оп , 6 м оп ) від лазера, що передає, замість БСПМ введено модифікований СПМ (МСПМ) [3] та замість ІБ введено багатофункціональний ІБ (БІБ) із б введенням сигналу тангенціальної складової швидкості (кутових швидкостей) ЛА, що виміряна, для інформаційного взаємозв'язку з Л А, та в разі необхідності, його розпізнавання. Побудова каналу вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА пов'язана з використанням синхронізованого одномодового богаточастотного випромінювання єдиного лазера-передавача та МЧЧМВ [4]. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у виявленні ЛА та при одночасному високоточному вимірюванні кутової складової швидкості (прискорення ' і ') у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, створенні багатоканального (N) інформаційного взаємозв'язку з ЛА на несучих частотах n , та в разі необхідності, його розпізнавання. На Фіг.1 приведена узагальнена структурна схема запропонованого каналу, де: 1 вимірювальний сигнал; 2 - інформаційний сигнал; 4 м оп ... - введення опорних сигналів з частотами міжмодових ( м оп , 2 биттів м оп , 3 м оп , 6 м оп ) від лазера, що передає; б - введення сигналу тангенціальної складової швидкості (кутових швидкостей) ЛА, що виміряна. На Фіг.2 приведено створення рівносигнального напрямку (РСН) та сканування сумарною ДС лазерного випромінювання у невеликому куті і окремо 4-мя діаграмами спрямованості в ортогональних площинах. На Фіг.3 приведені епюри напруг з виходів блоків пропонуємого каналу. Запропонований канал вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ЛА містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, модифікований блок дефлекторів, передаючу оптику, приймаючу оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери „1"|„0", схеми „і", реверсивні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину та - введення м оп опорних сигналів з частотами міжмодових биттів ( м оп , 2 м оп , 3 м оп , 6 м оп ) від лазера, що передає і багатофункціональний інформаційний блок із б - введенням сигналу тангенціальної складової швидкості (кутових швидкостей) ЛА, що виміряна, для інформаційного взаємозв'язку з ЛА, та в разі необхідності, його розпізнавання. Робота запропонованого каналу вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ЛА полягає в наступному. Із синхронізованого одномодового багаточастотного спектра випромінювання YAG:Nd3+ - лазера (або лазера з більш кращими характеристиками) (Лн) за допомогою МСПМ виділяються необхідні пари частот і окремі частоти для створення: - багатоканального (N) інформаційного зв'язку за умовою використання сигналу з подовжніх мод (несучих частот n ); - рівносигнального напрямку на основі формування сумарної ДС лазерного випромінювання, завдяки частково перетинаючих 4-х парціальних діаграм спрямованості, за умовою використання комбінацій подовжніх мод («підфарбованих» різницевими частотами міжмодових биттів) 54 5 63 6 3 м, 4 3 м, 97 82 9 2 7 8 2 м, 6 . м Груповий сигнал, який складений із несучих частот n , минаючи МБД, потрапляє на ПРДО де змішується (модулюється) з інформаційним сигналом від БІБ та формує багатоканальний (N) 5 51059 інформаційний сигнал, що передається на ЛА (взаємозв'язок) (Фіг.1, 2). Водночас сигнал частот міжмодових биттів та 6 м потрапляє на МБД, м ,2 м ,3 м який створений з 4-х п'єзоелектричних дефлекторів. Парціальні ДС лазерного випромінювання попарно зустрічно сканують МБД у кожній із двох ортогональних площин (Фіг.1, 2). Період сканування задається блоком керування дефлекторів, який разом з Лн живляться від керуючого елемента. Проходячи через передаючу оптику, груповий лазерний імпульсний сигнал пар 2 м , 6, 3 3 м частот: 5, 4 м , 9, 7 та 8, 2 6 м фокусується в скануємі точки простору, оскільки здійснюється зустрічне сканування двома парами ДС лазерного випромінювання у кожній із двох ортогональних площин і або X і У, при цьому несучі частоти n (інформаційний сигнал) - проходять вдовж РСН (Фіг.2). Прийняті прийомною оптикою від ЛА інформаційні та відбиті в процесі сканування чотирьох ДС, лазерні імпульсні сигнали і огинаючи сигнали ДС лазерного випромінювання за допомогою фотодетектора перетворюються в електричні імпульсні сигнали на несучій частоті і різницевих частотах міжмодових биттів. Посилювані ШП, вони розподіляються: - в багатофункціональний інформаційний блок для обробки інформації, що приймається від ЛА; - по РП, які настроєні на відповідні частоти: м ,2 м ,3 м ,6 м . Одночасно імпульсні сигнали радіочастоти, що надходять з РП1 і РП2 (PП м в ід і PП2 м в ід ) формують сигнал прискорення ', а РП3 і РП 4 (PП3 м в ід і РП6 м в ід ) - прискорення '. Формування сигналу прискорення ', полягає в наступному. Виділені імпульси ФІ 1 першої І лінії від опорної частоти надходять на м оп , реверсивний лічильник (РЛч 1) (Фіг.3). У цей же час відбитий від ЛА оптичний сигнал частоти міжмодових биттів, який перетворюється ФТД у радіочастоту міжмодових биттів м в ід , змінюється по закону руху ДС лазерного випромінювання, перетворюється у другої лінії II ФІ 2 у точках переходів півперіодів сканування в імпульси (один імпульс за півперіод сканування), надходить на тригер «1» та запускає його першим імпульсом. Перший імпульс, який надходить від тригера відкриває РЛч для рахування імпульсів від ФІ 1 і схему «І» для перезапису на схему порівняння. Другий імпульс від тригера надходить на реверсивний вхід того ж РЛч, який здійснює зворотній рахунок імпульсів, які надходять через нього. Третій і т.д. імпульси, надходять на тригер та роблять аналогічні дії першому. Другий імпульс не надходить на схему «І», а третій імпульс надходить, як і перший, на ФІ 3, схему «І», пропускає різностне число на схему порівняння і 6 т.д. Таким чином, в РЛч записується число імпульсів, порівняно різності подовженого та покороченого (руху ДС) півперіоду сканування. Півперіод сканування подовжується тоді, коли швидкість руху ЛА співпадає з швидкістю руху ДС лазерного випромінювання, а коли не співпадає покорочується (Фіг.4). Формування сигналу прискорення ', відбувається таким же чином, як для прискорення '. Отримання інформації про кутові швидкості (прискорення ' і ') з її відображенням відбувається в ЕЦОМ. В разі необхідності виявлення ЛА у заданої точці простору груповий сигнал, який складений із частот міжмодових биттів і несучих частот n , сканується у заданій зоні із заданим законом сканування у вигляді сумарної ДС лазерного випромінювання за допомогою модифікованого блоку дефлекторів, де кут та напрямок відхилення сумарної ДС задається БКД (Фіг.1, 2). Вимірювальна інформація про тангенціальну складову швидкості (кутові швидкості) ЛА через б введення поступає на БІБ, де обробляється для здійснення розпізнавання літального апарату, за яким ведеться стеження. Випромінювання, яке знаходиться біля рівня втрат синхронізованого одномодового багаточастотного спектру лазера-передавача та є невелике за потужністю - не використовується. Формування сумарної ДС лазерного випромінювання, створення РСН, інформаційного каналу для каналу, що пропонується, пов'язано із задоволенням жорстких вимог, що пред'являються до спектру випромінювання одномодового багаточастотного лазера-передавача, тобто високоточної синхронізації подовжніх мод і стабілізації частот міжмодових биттів. Кількість інформаційних каналів (N), що формуються, залежить від кількості мод (несучих частот які мають необхідні вихідні n ), характеристики для використання. Джерела інформації: 1. Патент України на винахід №25804, Україна, МПК G01S17/42, G01S17/66. Канал вимірювання кутових швидкостей літальних апаратів для лазерної інформаційно-вимірювальної системи. /О.В.Коломійцев, Г.В.Альошин, В.В.Баранник та ін. - №u200703227; Заяв. 26.03.2007; Опубл. 27.08.2007; Бюл. № 13. - 8с. 2. Патент України на корисну модель №43788, Україна, МПК G01S17/42, G01S17/66. Канал вимірювання кутових швидкостей літальних апаратів з додатковим скануванням. /О.В. оломійцев, Г.В.Альошин, В.В.Бєлімов та ін. №u200904602; Заяв. 08.05.2009; Опубл. 25.08.2009; Бюл. №16. - 8 . 3. Патент України на корисну модель №43725, Україна, МПК Н04Q1/453. Модифікований селектор подовжніх мод. /О.В.Коломшцев, Г.В.Альошин, В.В.Бєлімов та ін. - №u200903693; Заяв. 15.04.2009; Опубл. 25.08.2009; Бюл. №16. 6с. 4. Деклараційний патент України на винахід №65099А, Україна, MПК G01S17/42, G01S17/66. 7 Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів. 51059 8 /О.В.Коломійцев - №2003054908; Заяв. 29.05.2003; Опубл. 15.03.2004; Бюл. № 3 - 8с. 9 Комп’ютерна верстка Н. Лиcенко 51059 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюChannel for measurement of angular velocities of aircrafts with possibility of identification of a
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Boliubash Oleksii Oleksiiovych, Vasyliev Dmytro Hennadiiovych, Vysotskyi Oleh Volodymyrovych, Vorobiov Ruslan Volodymyrovych, Klivets Serhii Ivanovych, Makarov Serhii Anatoliiovych, Pashkov Dmytro Pavlovych, Rysovanyi Oleksandr Mykolaiovych, Sidchenko Serhii Oleksandrovych
Назва патенту російськоюКанал измерения угловых скоростей летательных аппаратов с возможностью распознавания ла
Автори російськоюКоломийцев Алексей Владимирович, Болюбаш Алексей Алексеевич, Васильев Дмитрий Геннадьевич, Высоцкий Олег Владимирович, Воробьев Руслан Владимирович, Кливец Сергей Иванович, Макаров Сергей Анатольевич, Пашков Дмитрий Павлович, Рисованый Александр Николаевич, Сидченко Сергей Александрович
МПК / Мітки
МПК: G01S 17/66, G01S 17/42
Мітки: можливістю, кутових, швидкостей, канал, апаратів, розпізнавання, літальних, вимірювання
Код посилання
<a href="https://ua.patents.su/5-51059-kanal-vimiryuvannya-kutovikh-shvidkostejj-litalnikh-aparativ-z-mozhlivistyu-rozpiznavannya-la.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ла</a>
Канал вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ла
Номер патенту: 51040
Опубліковано: 25.06.2010
Автори: Воробйов Руслан Володимирович, Рисований Олександр Миколайович, Челпанов Артем Володимирович, Клівець Сергій Іванович, Васильєв Дмитро Геннадійович, Альошин Геннадій Васильович, Сідченко Сергій Олександрович, Закіров Замір Забірович, Костенко Ігор Леонідович, Коломійцев Олексій Володимирович
МПК: G01S 17/66, G01S 17/42
Мітки: швидкостей, вимірювання, кутових, літальних, канал, можливістю, формування, обробки, зображення, апаратів
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми...
Канал вимірювання кутових швидкостей літальних апаратів для лвс
Номер патенту: 45542
Опубліковано: 10.11.2009
Автори: Бєлімов Володимир Васильович, Хударковський Костянтин Ігорович, Рисований Олександр Миколайович, Васильєв Дмитро Геннадійович, Коломійцев Олексій Володимирович, Сідченко Сергій Олександрович, Альошин Геннадій Васильович, Кадубенко Станіслав Валентінович, Клівець Сергій Іванович, Катунін Альберт Миколайович
МПК: G01S 17/42, G01S 11/00
Мітки: лвс, кутових, канал, вимірювання, апаратів, швидкостей, літальних
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових бітів, формувачі імпульсів, тригери, схеми "і", резонансні лічильники, схеми порівняння, електронно-цифрові обчислювальні...
Канал вимірювання кутових швидкостей літальних апаратів
Номер патенту: 43724
Опубліковано: 25.08.2009
Автори: Бєлімов Володимир Васильович, Копилов Олександр Олексійович, Рисований Олександр Миколайович, Висоцький Олег Володимирович, Катунін Альберт Миколайович, Хударковський Костянтин Ігорович, Васильєв Дмитро Геннадійович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Макаров Сергій Анатолійович
МПК: G01S 17/42, G01S 17/66
Мітки: апаратів, кутових, вимірювання, канал, швидкостей, літальних
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, інформаційний блок, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми "І", реверсивні лічильники, схеми...
Канал вимірювання кутових швидкостей літальних апаратів з додатковими можливостями
Номер патенту: 44334
Опубліковано: 25.09.2009
Автори: Васильєв Дмитро Геннадійович, Альошин Геннадій Васильович, Руденко Дмитро Васильович, Сідченко Сергій Олександрович, Коломійцев Олексій Володимирович, Копилов Олександр Олексійович, Хударковський Костянтин Ігорович, Бєлімов Володимир Васильович, Клівець Сергій Іванович, Рисований Олександр Миколайович
МПК: G01S 17/42, G01S 17/66
Мітки: апаратів, додатковими, канал, можливостями, вимірювання, швидкостей, літальних, кутових
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з додатковими можливостями, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, інформаційний блок, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми...
Канал вимірювання кутових швидкостей літальних апаратів з додатковим скануванням для лвс
Номер патенту: 47088
Опубліковано: 11.01.2010
Автори: Висоцький Олег Володимирович, Бєлімов Володимир Васильович, Макаров Сергій Анатолійович, Коломійцев Олексій Володимирович, Рисований Олександр Миколайович, Гоготов Валерій Васильович, Сідченко Сергій Олександрович, Васильєв Дмитро Геннадійович, Хударковський Костянтин Ігорович, Копилов Олександр Олексійович
МПК: G01S 17/42, G01S 11/00
Мітки: додатковим, швидкостей, канал, лвс, вимірювання, літальних, скануванням, кутових, апаратів
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з додатковим скануванням для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми "і", резонансні лічильники, схеми порівняння,...
Попередній патент: Спосіб прогнозування розвитку хронічного захворювання нирок у дітей
Наступний патент: Канал вимірювання радіальної швидкості літальних апаратів з можливістю розпізнавання ла
Випадковий патент: Пристрій для лікування "аромобароіплікатор"