Спосіб формування бажаних статорних струмів асинхронного електродвигуна з короткозамкненим ротором
Номер патенту: 53315
Опубліковано: 11.10.2010
Автори: Потапенко Євгеній Михайлович, Потапенко Євген Євгенович
Формула / Реферат
1. Спосіб формування бажаних статорних струмів асинхронного трифазного електродвигуна з короткозамкненим ротором, який полягає в тому, що складові бажаного статорного струму у синхронному базисі формують у блоці формування бажаного струму окремо, а саме бажаний струм намагнічування задають, бажаний моментний струм формують наступним чином: за допомогою датчика кута повороту ротора вимірюють кут, у блоці обчислення швидкості обчислюють швидкість ротора, на підставі яких, а також бажаних значень кута та швидкості у блоці формування бажаного струму формують бажане значення моментного струму, за допомогою датчиків струму вимірюють дві або три фази струму двигуна, за допомогою блока перетворення (три фази - дві фази) трифазні сигнали перетворюють у двофазні сигнали струмів у статорному базисі, які у свою чергу, за допомогою блока перетворення базисів (статорний - синхронний) перетворюють у сигнали моментного та намагнічуючого струмів у синхронному базисі, котрі відіймають від однойменних сигналів бажаних струмів, різницю подають на регулятори струмів, на виході яких одержують бажані значення керуючих напруг у синхронному базисі, які за допомогою перетворювача базисів (синхронний - статорний) перетворюють у бажані сигнали напруг статорного базису, ці отримані двофазні сигнали за допомогою блока перетворення (дві фази - три фази) перетворюють у трифазні бажані сигнали напруг, за якими у перетворювачі частоти формують трифазну живильну напругу для двигуна, яка формує статорний струм, який відрізняється тим, що бажані моментний струм та струм намагнічування формуються наступним чином: за різницями кута та його бажаного значення, а також швидкості ротора та її бажаного значення, у блоці формування бажаного струму формують закон керування, оцінюють невизначеність, на підставі яких формують бажане значення електромагнітного моменту, обмежують його значення, добувають корінь квадратний, результат підсилюють, внаслідок чого отримують бажаний струм намагнічування, а для формування бажаного моментного струму результат отримання кореня квадратного знову підсилюють з іншим коефіцієнтом підсилення, внаслідок чого отримують модуль бажаного моментного струму, якому надають знак бажаного обмеженого електромагнітного моменту.
2. Спосіб за п. 1, який відрізняється тим, що бажаний моментний струм формують шляхом підсилення бажаного обмеженого електромагнітного моменту, результат чого змінюють обернено пропорційно бажаному струму намагнічування.
Текст
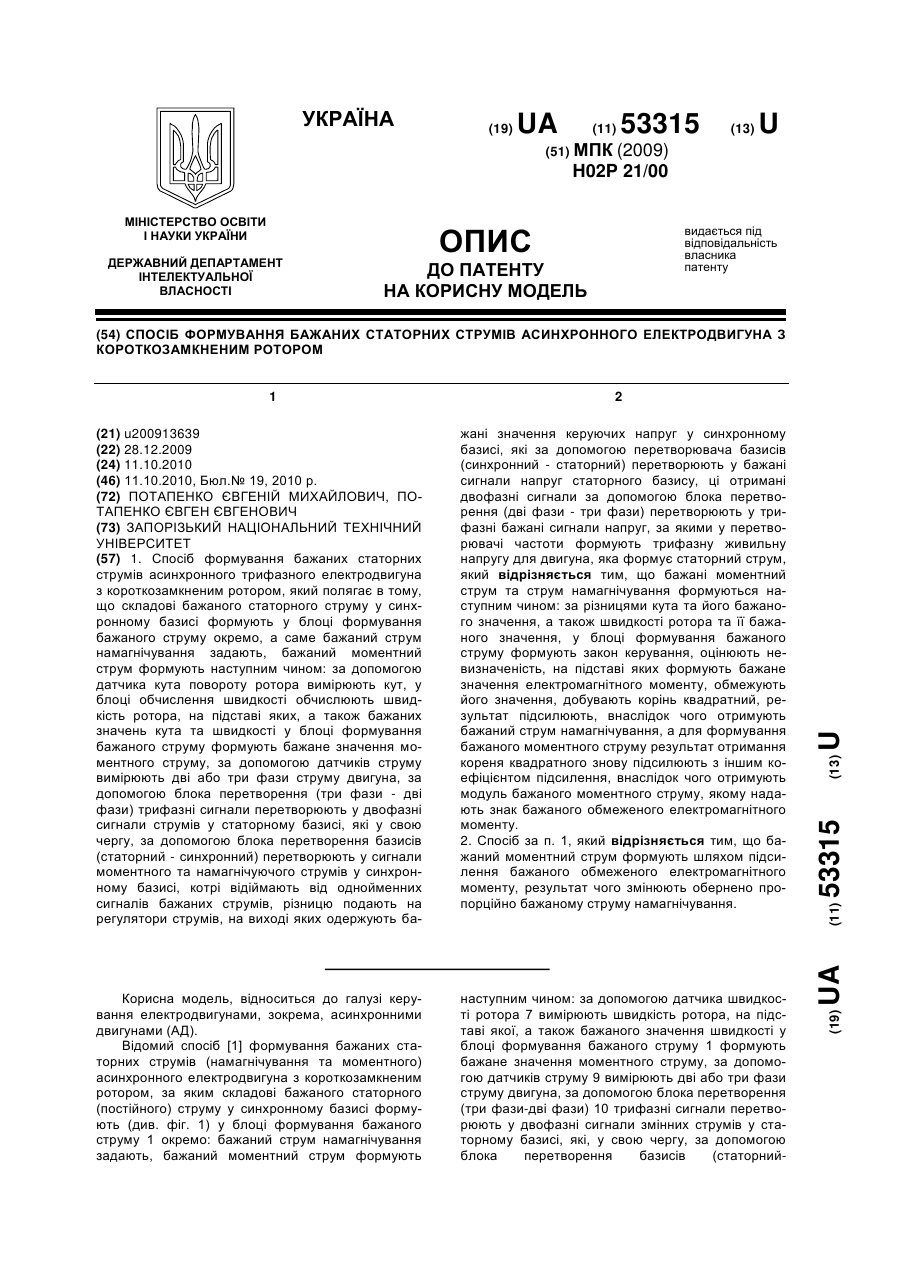
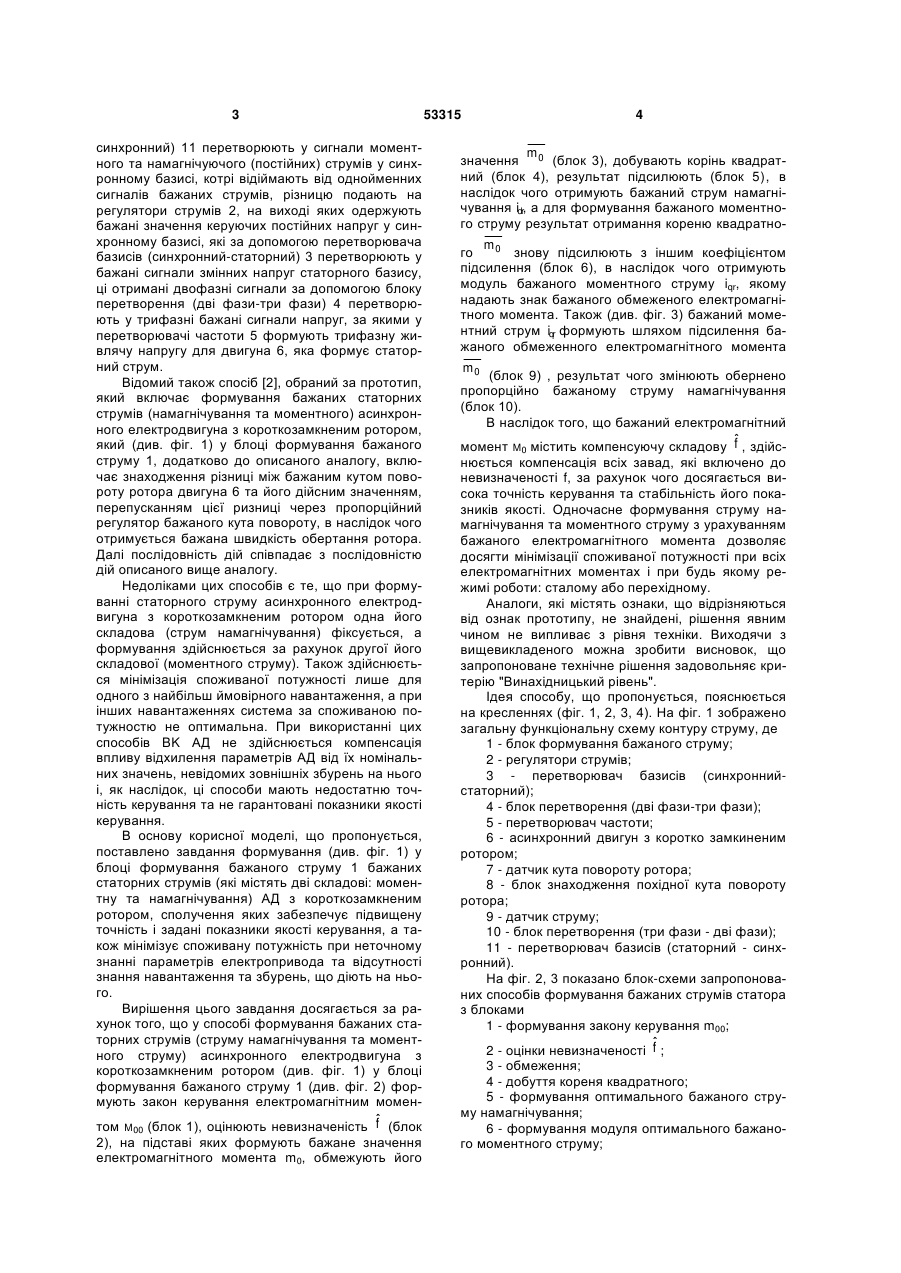
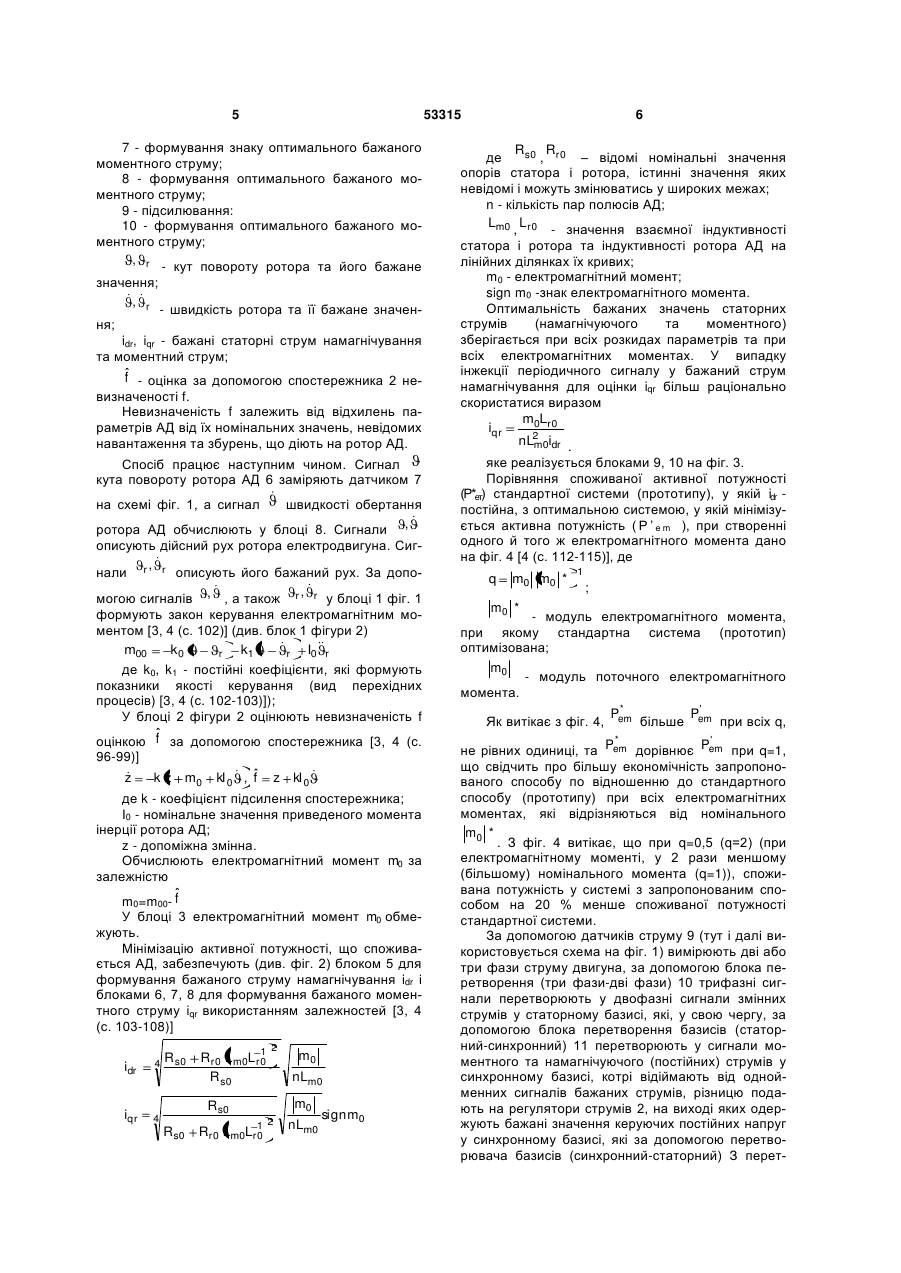
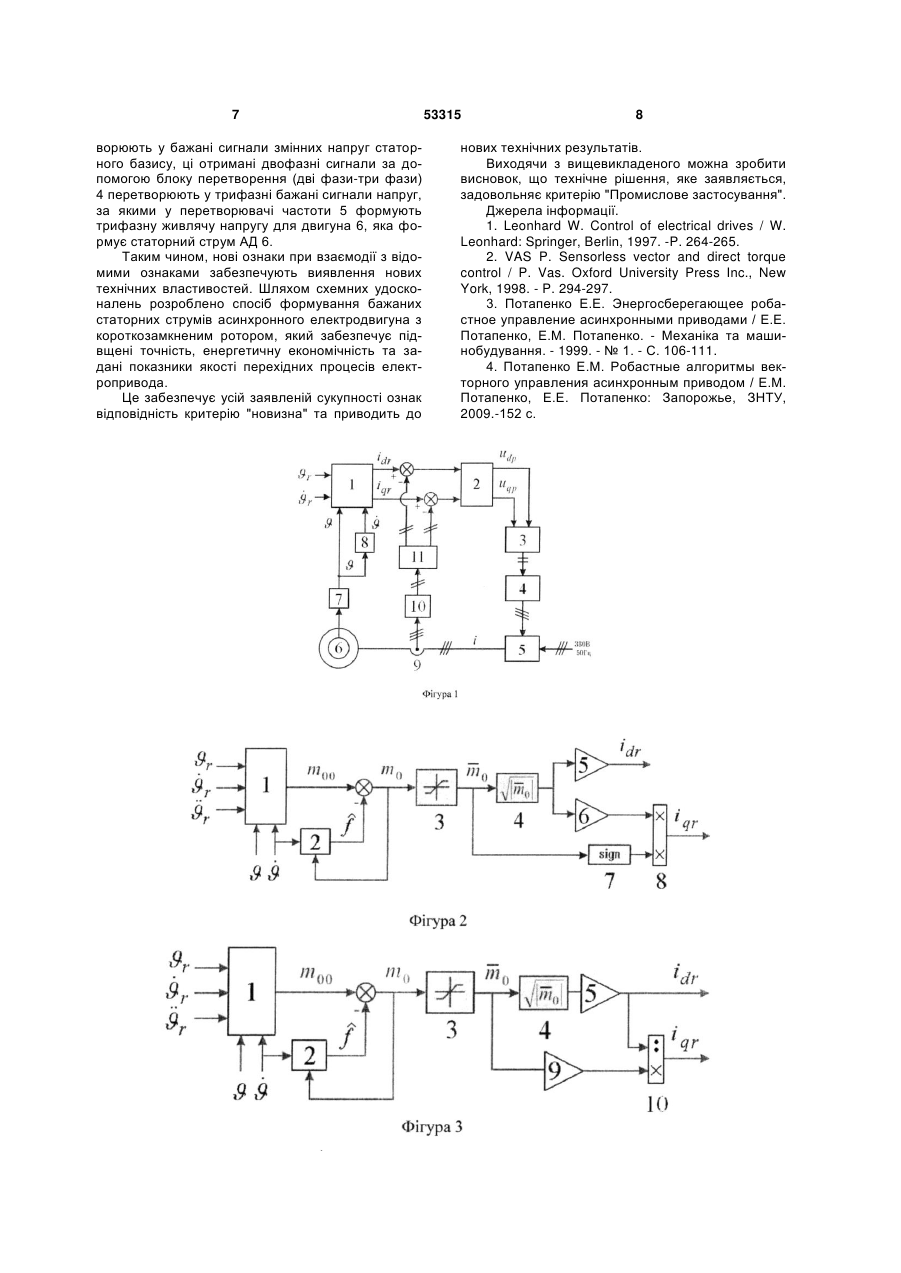
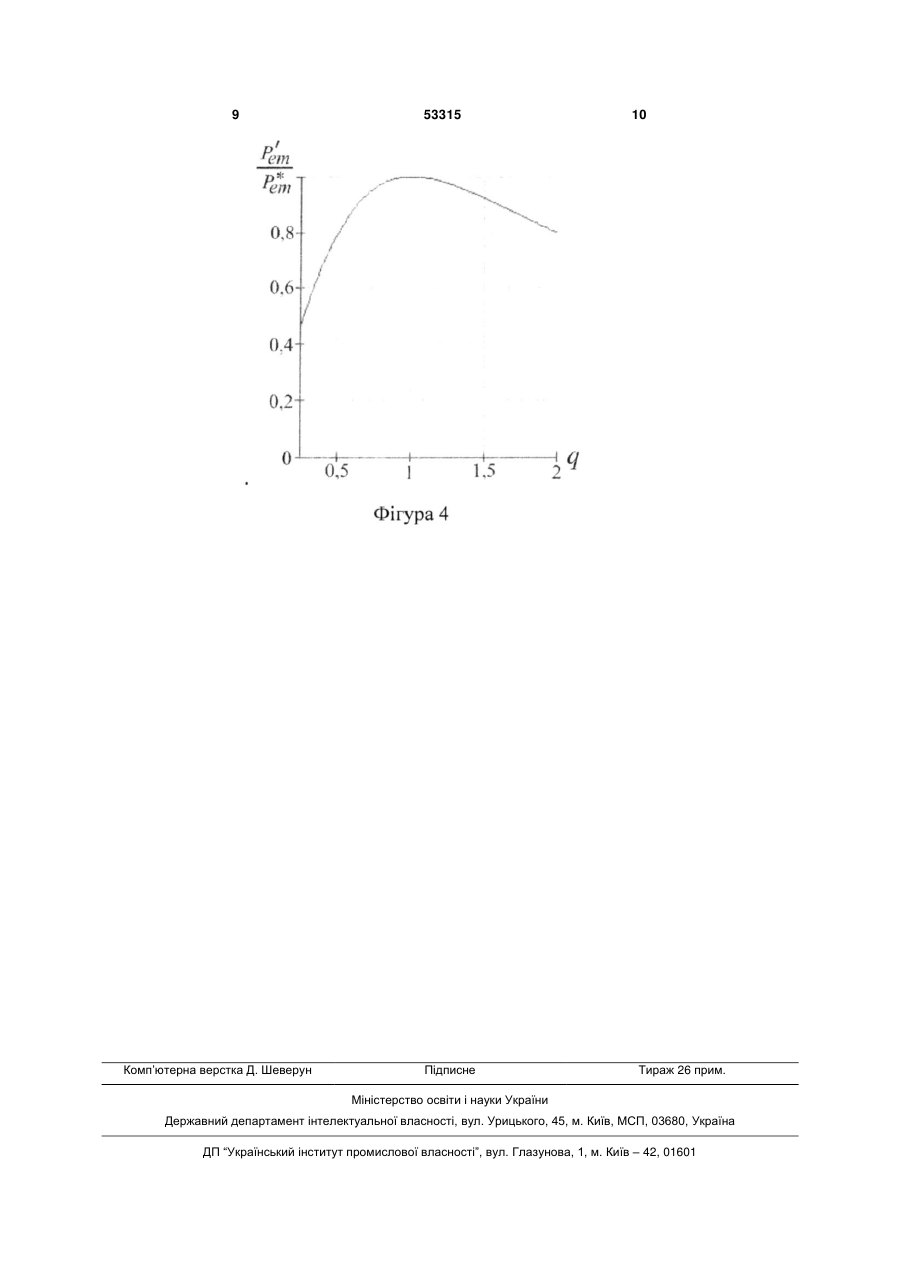
1. Спосіб формування бажаних статорних струмів асинхронного трифазного електродвигуна з короткозамкненим ротором, який полягає в тому, що складові бажаного статорного струму у синхронному базисі формують у блоці формування бажаного струму окремо, а саме бажаний струм намагнічування задають, бажаний моментний струм формують наступним чином: за допомогою датчика кута повороту ротора вимірюють кут, у блоці обчислення швидкості обчислюють швидкість ротора, на підставі яких, а також бажаних значень кута та швидкості у блоці формування бажаного струму формують бажане значення моментного струму, за допомогою датчиків струму вимірюють дві або три фази струму двигуна, за допомогою блока перетворення (три фази - дві фази) трифазні сигнали перетворюють у двофазні сигнали струмів у статорному базисі, які у свою чергу, за допомогою блока перетворення базисів (статорний - синхронний) перетворюють у сигнали моментного та намагнічуючого струмів у синхронному базисі, котрі відіймають від однойменних сигналів бажаних струмів, різницю подають на регулятори струмів, на виході яких одержують ба U 2 (19) 1 3 синхронний) 11 перетворюють у сигнали моментного та намагнічуючого (постійних) струмів у синхронному базисі, котрі відіймають від однойменних сигналів бажаних струмів, різницю подають на регулятори струмів 2, на виході яких одержують бажані значення керуючих постійних напруг у синхронному базисі, які за допомогою перетворювача базисів (синхронний-статорний) 3 перетворюють у бажані сигнали змінних напруг статорного базису, ці отримані двофазні сигнали за допомогою блоку перетворення (дві фази-три фази) 4 перетворюють у трифазні бажані сигнали напруг, за якими у перетворювачі частоти 5 формують трифазну живлячу напругу для двигуна 6, яка формує статорний струм. Відомий також спосіб [2], обраний за прототип, який включає формування бажаних статорних струмів (намагнічування та моментного) асинхронного електродвигуна з короткозамкненим ротором, який (див. фіг. 1) у блоці формування бажаного струму 1, додатково до описаного аналогу, включає знаходження різниці між бажаним кутом повороту ротора двигуна 6 та його дійсним значенням, перепусканням цієї ризниці через пропорційний регулятор бажаного кута повороту, в наслідок чого отримується бажана швидкість обертання ротора. Далі послідовність дій співпадає з послідовністю дій описаного вище аналогу. Недоліками цих способів є те, що при формуванні статорного струму асинхронного електродвигуна з короткозамкненим ротором одна його складова (струм намагнічування) фіксується, а формування здійснюється за рахунок другої його складової (моментного струму). Також здійснюється мінімізація споживаної потужності лише для одного з найбільш ймовірного навантаження, а при інших навантаженнях система за споживаною потужностю не оптимальна. При використанні цих способів BK АД не здійснюється компенсація впливу відхилення параметрів АД від їх номінальних значень, невідомих зовнішніх збурень на нього і, як наслідок, ці способи мають недостатню точність керування та не гарантовані показники якості керування. В основу корисної моделі, що пропонується, поставлено завдання формування (див. фіг. 1) у блоці формування бажаного струму 1 бажаних статорних струмів (які містять дві складові: моментну та намагнічування) АД з короткозамкненим ротором, сполучення яких забезпечує підвищену точність і задані показники якості керування, а також мінімізує споживану потужність при неточному знанні параметрів електропривода та відсутності знання навантаження та збурень, що діють на нього. Вирішення цього завдання досягається за рахунок того, що у способі формування бажаних статорних струмів (струму намагнічування та моментного струму) асинхронного електродвигуна з короткозамкненим ротором (див. фіг. 1) у блоці формування бажаного струму 1 (див. фіг. 2) формують закон керування електромагнітним моменˆ том M00 (блок 1), оцінюють невизначеність f (блок 2), на підставі яких формують бажане значення електромагнітного момента m0, обмежують його 53315 4 m значення 0 (блок 3), добувають корінь квадратний (блок 4), результат підсилюють (блок 5), в наслідок чого отримують бажаний струм намагнічування idr, а для формування бажаного моментного струму результат отримання кореню квадратноm0 го знову підсилюють з іншим коефіцієнтом підсилення (блок 6), в наслідок чого отримують модуль бажаного моментного струму iqr, якому надають знак бажаного обмеженого електромагнітного момента. Також (див. фіг. 3) бажаний моментний струм iqr формують шляхом підсилення бажаного обмеженного електромагнітного момента m0 (блок 9) , результат чого змінюють обернено пропорційно бажаному струму намагнічування (блок 10). В наслідок того, що бажаний електромагнітний ˆ момент M0 містить компенсуючу складову f , здійснюється компенсація всіх завад, які включено до невизначеності f, за рахунок чого досягається висока точність керування та стабільність його показників якості. Одночасне формування струму намагнічування та моментного струму з урахуванням бажаного електромагнітного момента дозволяє досягти мінімізації споживаної потужності при всіх електромагнітних моментах і при будь якому режимі роботи: сталому або перехідному. Аналоги, які містять ознаки, що відрізняються від ознак прототипу, не знайдені, рішення явним чином не випливає з рівня техніки. Виходячи з вищевикладеного можна зробити висновок, що запропоноване технічне рішення задовольняє критерію "Винахідницький рівень". Ідея способу, що пропонується, пояснюється на кресленнях (фіг. 1, 2, 3, 4). На фіг. 1 зображено загальну функціональну схему контуру струму, де 1 - блок формування бажаного струму; 2 - регулятори струмів; 3 - перетворювач базисів (синхроннийстаторний); 4 - блок перетворення (дві фази-три фази); 5 - перетворювач частоти; 6 - асинхронний двигун з коротко замкиненим ротором; 7 - датчик кута повороту ротора; 8 - блок знаходження похідної кута повороту ротора; 9 - датчик струму; 10 - блок перетворення (три фази - дві фази); 11 - перетворювач базисів (статорний - синхронний). На фіг. 2, 3 показано блок-схеми запропонованих способів формування бажаних струмів статора з блоками 1 - формування закону керування m00; ˆ 2 - оцінки невизначеності f ; 3 - обмеження; 4 - добуття кореня квадратного; 5 - формування оптимального бажаного струму намагнічування; 6 - формування модуля оптимального бажаного моментного струму; 5 53315 7 - формування знаку оптимального бажаного моментного струму; 8 - формування оптимального бажаного моментного струму; 9 - підсилювання: 10 - формування оптимального бажаного моментного струму; , r - кут повороту ротора та його бажане значення; , r - швидкість ротора та її бажане значення; idr, iqr - бажані статорні струм намагнічування та моментний струм; ˆ f - оцінка за допомогою спостережника 2 невизначеності f. Невизначеність f залежить від відхилень параметрів АД від їх номінальних значень, невідомих навантаження та збурень, що діють на ротор АД. Спосіб працює наступним чином. Сигнал кута повороту ротора АД 6 заміряють датчиком 7 на схемі фіг. 1, а сигнал швидкості обертання ротора АД обчислюють у блоці 8. Сигнали , описують дійсний рух ротора електродвигуна. Сиг, нали r r описують його бажаний рух. За допо , могою сигналів , , а також r r у блоці 1 фіг. 1 формують закон керування електромагнітним моментом [3, 4 (с. 102)] (див. блок 1 фігури 2) m00 k0 k1 r I0r r де k0, k1 - постійні коефіцієнти, які формують показники якості керування (вид перехідних процесів) [3, 4 (с. 102-103)]); У блоці 2 фігури 2 оцінюють невизначеність f ˆ оцінкою f за допомогою спостережника [3, 4 (с. 96-99)] ˆ z k z m0 kI 0 , f z kI 0 де k - коефіцієнт підсилення спостережника; I0 - номінальне значення приведеного момента інерції ротора АД; z - допоміжна змінна. Обчислюють електромагнітний момент m0 за залежністю ˆ m0=m00- f У блоці 3 електромагнітний момент m0 обмежують. Мінімізацію активної потужності, що споживається АД, забезпечують (див. фіг. 2) блоком 5 для формування бажаного струму намагнічування idr і блоками 6, 7, 8 для формування бажаного моментного струму iqr використанням залежностей [3, 4 (с. 103-108)] idr 4 iqr Rs0 4 1 Rr 0 Lm0Lr 0 Rs0 2 Rs0 Rs0 1 2 Rr 0 Lm0Lr 0 m0 nLm0 m0 nLm0 sign m0 6 Rs0 Rr 0 де , – відомі номінальні значення опорів статора і ротора, істинні значення яких невідомі і можуть змінюватись у широких межах; n - кількість пар полюсів АД; Lm0 Lr 0 , - значення взаємної індуктивності статора і ротора та індуктивності ротора АД на лінійних ділянках їх кривих; m0 - електромагнітний момент; sign m0 -знак електромагнітного момента. Оптимальність бажаних значень статорних струмів (намагнічуючого та моментного) зберігається при всіх розкидах параметрів та при всіх електромагнітних моментах. У випадку інжекції періодичного сигналу у бажаний струм намагнічування для оцінки iqr більш раціонально скористатися виразом m0Lr 0 iqr nL2 0idr . m яке реалізується блоками 9, 10 на фіг. 3. Порівняння споживаної активної потужності (Р*ет) стандартної системи (прототипу), у якій idr постійна, з оптимальною системою, у якій мінімізується активна потужність ( Р ’ е m ), при створенні одного й того ж електромагнітного момента дано на фіг. 4 [4 (с. 112-115)], де q m0 m0 * 1 ; m0 * - модуль електромагнітного момента, при якому стандартна система (прототип) оптимізована; m0 - модуль поточного електромагнітного момента. Як витікає з фіг. 4, * Pem більше ' Pem при всіх q, * ' не рівних одиниці, та Pem дорівнює Pem при q=1, що свідчить про більшу економічність запропонованого способу по відношенню до стандартного способу (прототипу) при всіх електромагнітних моментах, які відрізняються від номінального m0 * . З фіг. 4 витікає, що при q=0,5 (q=2) (при електромагнітному моменті, у 2 рази меншому (більшому) номінального момента (q=1)), споживана потужність у системі з запропонованим способом на 20 % менше споживаної потужності стандартної системи. За допомогою датчиків струму 9 (тут і далі використовується схема на фіг. 1) вимірюють дві або три фази струму двигуна, за допомогою блока перетворення (три фази-дві фази) 10 трифазні сигнали перетворюють у двофазні сигнали змінних струмів у статорному базисі, які, у свою чергу, за допомогою блока перетворення базисів (статорний-синхронний) 11 перетворюють у сигнали моментного та намагнічуючого (постійних) струмів у синхронному базисі, котрі відіймають від однойменних сигналів бажаних струмів, різницю подають на регулятори струмів 2, на виході яких одержують бажані значення керуючих постійних напруг у синхронному базисі, які за допомогою перетворювача базисів (синхронний-статорний) З перет 7 ворюють у бажані сигнали змінних напруг статорного базису, ці отримані двофазні сигнали за допомогою блоку перетворення (дві фази-три фази) 4 перетворюють у трифазні бажані сигнали напруг, за якими у перетворювачі частоти 5 формують трифазну живлячу напругу для двигуна 6, яка формує статорний струм АД 6. Таким чином, нові ознаки при взаємодії з відомими ознаками забезпечують виявлення нових технічних властивостей. Шляхом схемних удосконалень розроблено спосіб формування бажаних статорних струмів асинхронного електродвигуна з короткозамкненим ротором, який забезпечує підвщені точність, енергетичну економічність та задані показники якості перехідних процесів електропривода. Це забезпечує усій заявленій сукупності ознак відповідність критерію "новизна" та приводить до 53315 8 нових технічних результатів. Виходячи з вищевикладеного можна зробити висновок, що технічне рішення, яке заявляється, задовольняє критерію "Промислове застосування". Джерела інформації. 1. Leonhard W. Control of electrical drives / W. Leonhard: Springer, Berlin, 1997. -P. 264-265. 2. VAS P. Sensorless vector and direct torque control / P. Vas. Oxford University Press Inc., New York, 1998. - P. 294-297. 3. Потапенко Е.Е. Энергосберегающее робастное управление асинхронными приводами / Е.Е. Потапенко, Е.М. Потапенко. - Механіка та машинобудування. - 1999. - № 1. - С. 106-111. 4. Потапенко Е.М. Робастные алгоритмы векторного управления асинхронным приводом / Е.М. Потапенко, Е.Е. Потапенко: Запорожье, ЗНТУ, 2009.-152 с. 9 Комп’ютерна верстка Д. Шеверун 53315 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for forming required current of an asynchronous motor with a short-circuited rotor
Автори англійськоюPotapenko Yevhenii Mykhailovych, Potapenko Yevhen Yevhenovych
Назва патенту російськоюСпособ формирования необходимых статорных токов асинхронного электродвигателя с короткозамкнутым ротором
Автори російськоюПотапенко Евгений Михайлович, Потапенко Евгений Евгеньевич
МПК / Мітки
МПК: H02P 21/00
Мітки: короткозамкненим, струмів, бажаних, електродвигуна, ротором, формування, асинхронного, спосіб, статорних
Код посилання
<a href="https://ua.patents.su/5-53315-sposib-formuvannya-bazhanikh-statornikh-strumiv-asinkhronnogo-elektrodviguna-z-korotkozamknenim-rotorom.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування бажаних статорних струмів асинхронного електродвигуна з короткозамкненим ротором</a>
Спосіб захисту асинхронного електродвигуна з короткозамкненим ротором від теплового перевантаження
Номер патенту: 27710
Опубліковано: 12.11.2007
Автори: Сивокобиленко Віталій Федорович, Ткаченко Сергій Миколайович
МПК: H02K 15/00, G01R 31/34
Мітки: електродвигуна, захисту, короткозамкненим, перевантаження, спосіб, асинхронного, теплового, ротором
Формула / Реферат:
Спосіб захисту асинхронного електродвигуна з короткозамкненим ротором від теплового перевантаження, що включає безперервне вимірювання миттєвих значень фазних струмів і напруг, розрахунок температури нагріву обмоток статора і ротора, при перевищенні допустимих значень яких проводять відключення двигуна від живильної мережі, який відрізняється тим, що перед введенням в експлуатацію короткозамкненого асинхронного двигуна заздалегідь вимірюють...
Спосіб захисту асинхронного електродвигуна з короткозамкненим ротором від теплового перевантаження
Номер патенту: 45151
Опубліковано: 26.10.2009
Автори: Сивокобиленко Віталій Федорович, Ткаченко Сергій Миколайович
МПК: G01R 31/34, H02K 15/00
Мітки: асинхронного, захисту, перевантаження, спосіб, короткозамкненим, електродвигуна, ротором, теплового
Формула / Реферат:
Спосіб захисту асинхронного електродвигуна з короткозамкненим ротором від теплового перевантаження, що включає попереднє визначення перед введенням в експлуатацію короткозамкненого асинхронного двигуна при відомій початковій температурі холодного стану машини опору обмоток статора, гілки намагнічування з досліду неробочого ходу і функціональних залежностей опору ротора від ковзання з дослідів подачі на статор трифазної напруги різної частоти...
Пристрій для пуску асинхронного електродвигуна з короткозамкненим ротором
Номер патенту: 39987
Опубліковано: 16.07.2001
Автор: Слободянюк Віктор Костянтинович
МПК: H02P 1/16
Мітки: пристрій, електродвигуна, асинхронного, ротором, короткозамкненим, пуску
Формула / Реферат:
Пристрій для пуску асинхронного електродвигуна з короткозамкненим ротором, який містить кінематично з'єднані розгінний електродвигун, пружну передачу, асинхронний електродвигун з датчиком швидкості, під'єднаний до джерела живлення, блок управління, що містить пускач з контактами, кнопку "Пуск", кнопку "Стоп" і проміжне реле з контактами, під'єднане до датчика швидкості, який відрізняється тим, що блок управління...
Спосіб випробування асинхронного трифазного двигуна з короткозамкненим ротором та пристрій для його реалізації
Номер патенту: 62492
Опубліковано: 15.12.2003
Автори: Чорний Олексій Петрович, Родькін Дмитро Йосипович, Мартиненко Віта Олександрівна, Калінов Андрій Петрович, Тараненко Сергій Іванович, Аміров Анатолій Мойсеєвич
МПК: G01R 31/34
Мітки: ротором, випробування, пристрій, спосіб, реалізації, двигуна, асинхронного, короткозамкненим, трифазного
Формула / Реферат:
l. Спосіб випробування асинхронного трифазного двигуна з короткозамкненим ротором, який полягає в підключенні статора двигуна до трифазної симетричної мережі з регульованою напругою за допомогою симетричного трифазного регулятора напруги, зміні напруги від нуля до значення 0,1UH, при великих кутах регулювання перетворювача вимірюють струми і напруги в трьох фазах, визначають параметри схеми заміщення двигуна при ковзанні S=1,0:x1, x2, xµ,...
Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення
Номер патенту: 36060
Опубліковано: 16.04.2001
Автори: Вошун Олексій Миколайович, Луговой Анатолій Васильович, Добрецов Володимир Валентинович, Родькін Дмитро Йосипович, Чорний Олексій Петрович, Сисюк Геннадій Юрійович, Долженко Віктор Володимирович, Пасмурских Олександр Олексійович
МПК: G01R 31/34
Мітки: діагностики, спосіб, асинхронного, двигуна, здійснення, ротором, пристрій, короткозамкненим, параметрів
Формула / Реферат:
1. Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, в відключенні статорних обмоток від мережі в момент переходу струму через нуль, вимірюванні залишкової напруги після відключення, який відрізняється тим, що в момент відключення вимірюють стрибок напруги на затискачах статора...
Попередній патент: Соєвий харчовий продукт з протипухлинною активністю
Наступний патент: Спосіб відновлення безперервності шлунково-кишкового тракту
Випадковий патент: Токарний верстат