Спосіб випробування асинхронного трифазного двигуна з короткозамкненим ротором та пристрій для його реалізації
Номер патенту: 62492
Опубліковано: 15.12.2003
Автори: Чорний Олексій Петрович, Калінов Андрій Петрович, Мартиненко Віта Олександрівна, Тараненко Сергій Іванович, Родькін Дмитро Йосипович, Аміров Анатолій Мойсеєвич
Формула / Реферат
l. Спосіб випробування асинхронного трифазного двигуна з короткозамкненим ротором, який полягає в підключенні статора двигуна до трифазної симетричної мережі з регульованою напругою за допомогою симетричного трифазного регулятора напруги, зміні напруги від нуля до значення 0,1UH, при великих кутах регулювання перетворювача вимірюють струми і напруги в трьох фазах, визначають параметри схеми заміщення двигуна при ковзанні S=1,0:x1, x2, xµ, R2, rµ, зміні напруги від 0,8UH до 1,2UH, вимірюванні миттєвих значень струмів і напруг і визначенні їх гармонійного складу, який відрізняється тим, що складають систему рівнянь енергобалансу на основі розкладання залежностей струмів і напруг на косинусні і синусні складові для v гармонік, рівень яких перевищує встановлений рівень (наприклад 2,5%) від рівня першої гармоніки струму:
вирішують отриману систему щодо гармонійних складових ЕРС Eav, Ebv, гармонійних складових контуру намагнічування Iaµv, Ibµv, контуру ротора I2av, I2bv i ковзання двигуна S1, прирівнюють отриману ЕРС контуру намагнічування до складової потокозчеплення контуру намагнічування
апроксимують криву індуктивності контуру намагнічування залежністю
,
складають систему рівнянь для отриманих гармонік ЕРС контуру намагнічування
вирішують її відносно коефіцієнтів апроксимації a0, aam, abm, визначають розрахункове значення індуктивності насиченої сталі для кожної з фаз двигуна окремо
,
знаходять середнє значення індуктивності
,
визначають коефіцієнт якості процесів перетворення енергії та сумарні втрати в сталі:
;
,
порівнюють втрати двигуна з втратами в сталі при ненасиченому режимі роботи, визначають допустиму потужність випробуваного двигуна
,
шляхом зміни напруги від 0,8UH до 1,21UH визначається миттєва потужність, що споживається двигуном і її гармонійний склад, порівнюється гармонійний склад миттєвої потужності з гармонійним складом вібрацій двигуна, що випробується, визначається залежність вібрацій від змінної складової миттєвої потужності, по отриманих характеристиках рівня гармонік струму статора і нерівномірності насичення сталі статора визначають допустиме навантаження випробуваного двигуна.
2. Спосіб по п. 1, який відрізняється тим, що втрати в сталі визначаються для кожної фази окремо, вибирається більше значення потужності з трьох можливих, розраховується допустима потужність
.
3. Пристрій для реалізації способу за п.1, що включає асинхронний двигун з короткозамкненим ротором, підключений до мережі через тиристорний регулятор напруги, систему датчиків напруги і струмів фаз статора, датчик швидкості асинхронного двигуна, блок зв'язку з об'єктом, обчислювальний блок із пристроєм відображення інформації, який відрізняється тим, що він додатково обладнаний потенціал-регулятором з електромеханічним блоком керування, системою датчиків вібрацій двигуна по трьох ортогональних осях, тиристорним регулятором, обладнаним системою керування з пофазним керуванням напругою фаз, причому перший-дванадцятий входи блоку зв'язку з об'єктом зв'язані з трьома датчиками струму, трьома датчиками напруги, трьома датчиками вібрацій, датчиком швидкості обертання ротора двигуна, керуючі виходи блоку зв'язку з об'єктом, зв'язані відповідно з входом електромеханічного блоку керування потенціал-регулятора і входом блоку керування тиристорним регулятором з пофазним керуванням тиристорами, причому показник вібрацій двигуна визначається як середньоквадратичне вібрацій Вx, Вy, Вz по трьох взаємно перпендикулярних осях:
,
порівнюють рівень вібрацій В з допустимим Вд та роблять висновок про працездатність двигуна.
Текст
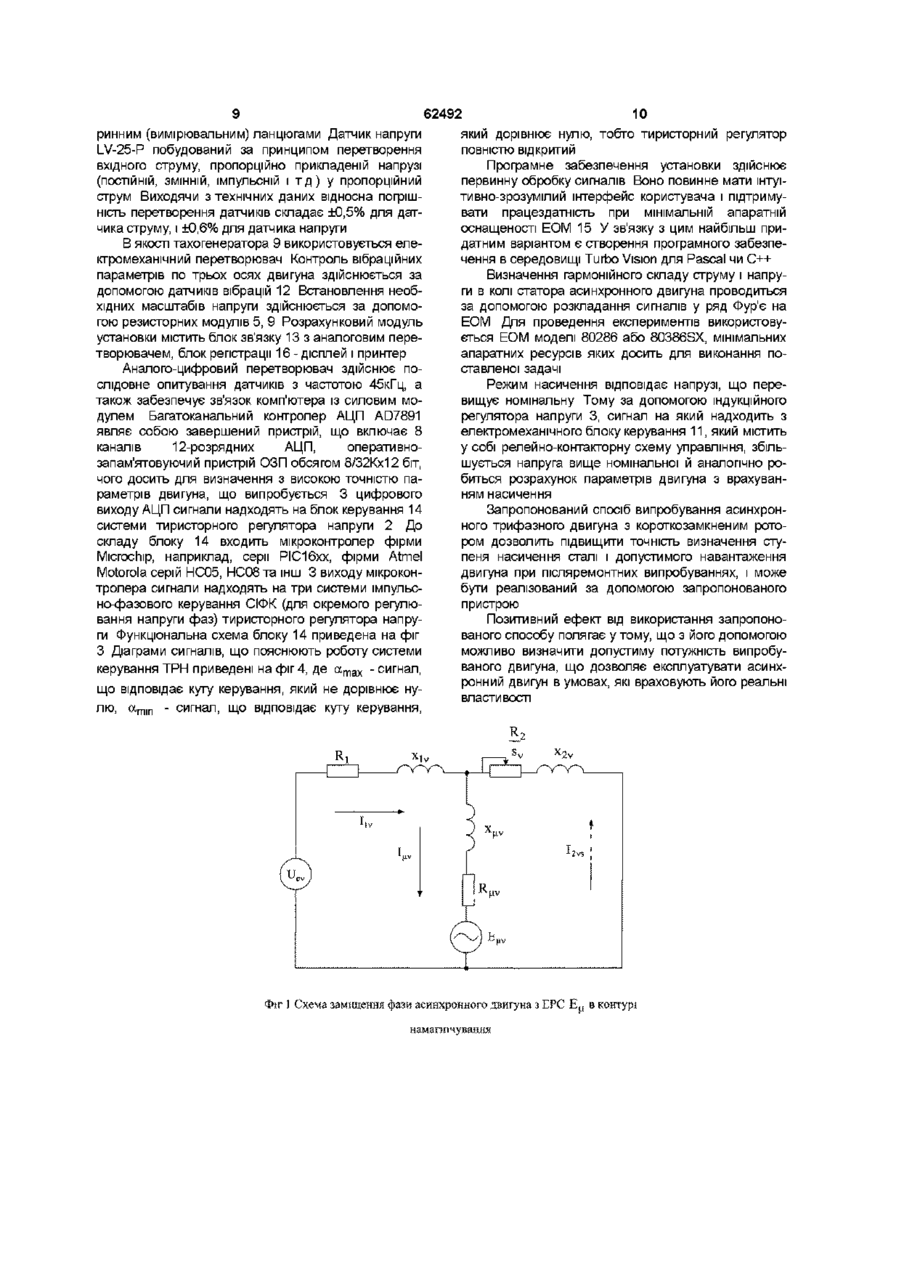
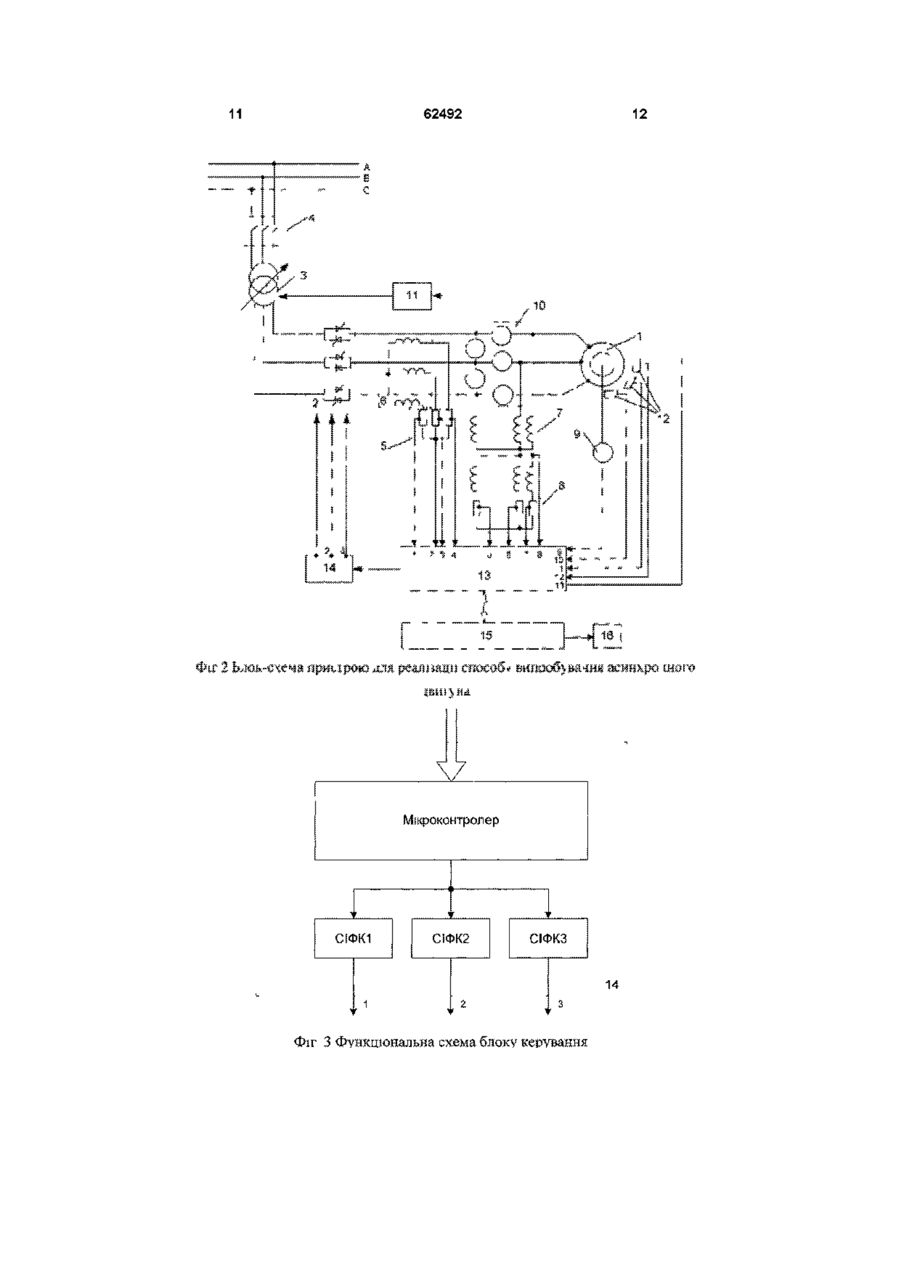
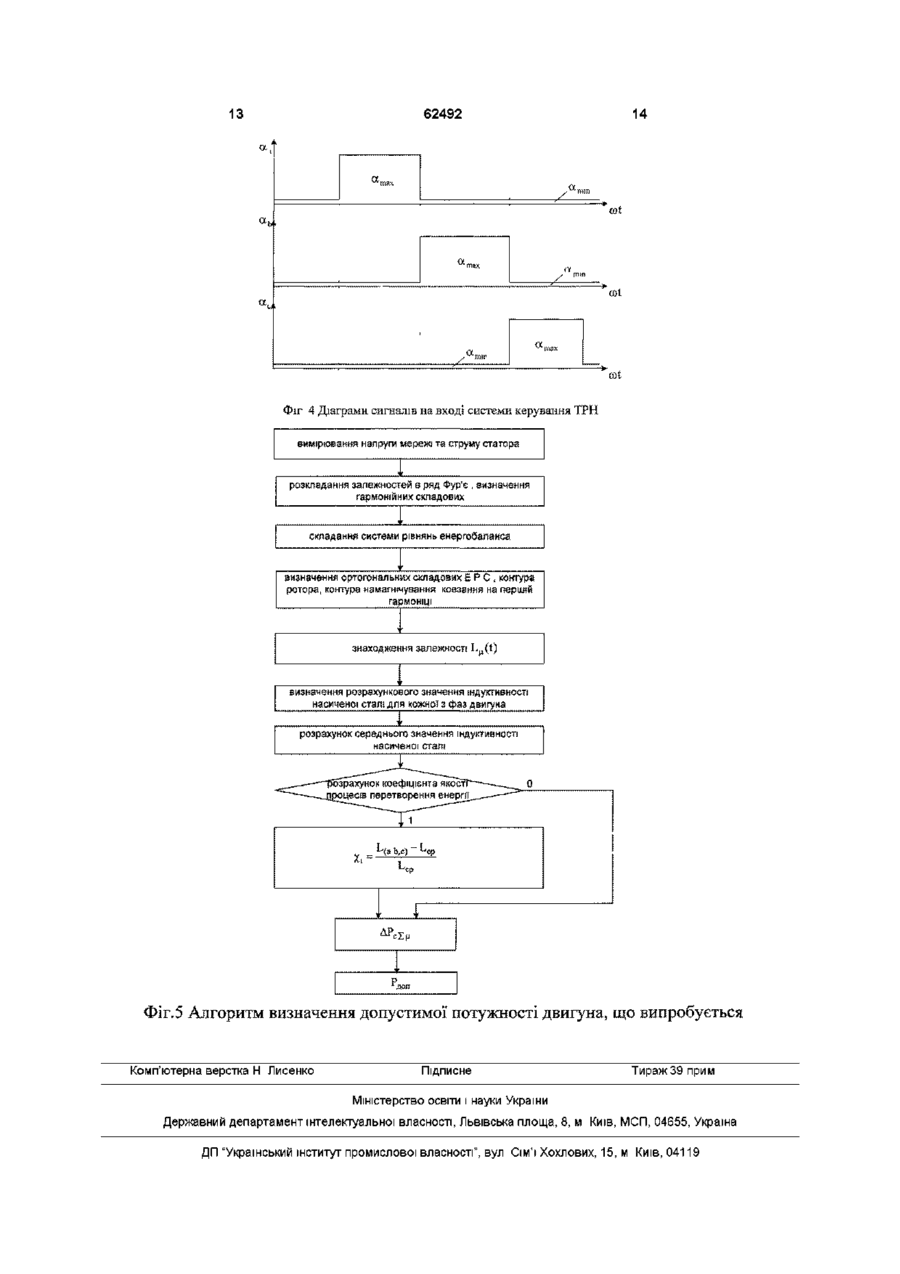
І Спосіб випробування асинхронного трифазного двигуна з короткозамкненим ротором, який полягає в підключенні статора двигуна до трифазної симетричної мережі з регульованою напругою за допомогою симетричного трифазного регулятора напруги, ЗМІНІ напруги від нуля до значення 0,1 UH, при великих кутах регулювання перетворювача вимірюють струми і напруги в трьох фазах, визначають параметри схеми заміщення двигуна при ковзанні вирішують отриману систему щодо гармонійних складових ЕРС Eav, Et,v, гармонійних складових контуру намагнічування laMv, lb|jv, контуру ротора bav, bbv і ковзання двигуна Si, прирівнюють отриману ЕРС контуру намагнічування до складової потокозчеплення контуру намагнічування апроксимують криву індуктивності контуру намагнічування залежністю L (t) = а cos2mQt + аЬп1 sin2mQt) складають систему рівнянь для отриманих гармонік ЕРС контуру намагнічування к - а ^ І ^ (соь[2т~ v ] D t cas[2m + vjQt) + і ? а в 3 ^ ( c o s [ 2 m - vJHt 4- cosJ2m + vj£3t)j + S=1,0 хі, Х2, хм, R2, гм, ЗМІНІ напруги від 0,8UH ДО 1,2UH, вимірюванні миттєвих значень струмів і напруг і визначенні їх гармонійного складу, який відрізняється тим, що складають систему рівнянь енергобалансу на основі розкладання залежностей струмів і напруг на косинусні і синусні складові для v гармонік, рівень яких перевищує встановлений рівень (наприклад 2,5%) від рівня першої гармоніки струму + mfi { ї.- admlhfiv (cos[v - 2m]Qt - cos[v + 2m]fit) + £ + 1 1 а Ь г а 1 а | Д Ч (cos[v -f 2m]Ot + cos.[v - 2m])Qt), ]vil f + sinf v + 2т]Пі) + - І і a ta I b l l v (sm[2m - v]ut + sin[2m + v]f Й}} + + zia b m l b (sin[v - 2m]nt + sm[v •> 2m])Qt}, - R , вирішують \'\ відносно коефіцієнтів апроксимації ао, aam, аьт, визначають розрахункове значення індуктивності насиченої сталі для кожної з фаз двигуна окремо І-цс = LjiH ~ a a m > знаходять середнє значення індуктивності визначають коефіцієнт якості процесів перетворення енергії та сумарні втрати в сталі 4a,b,c)-Lc P - 1 -ер АР, +'bp.v (О 62492 порівнюють втрати двигуна АРС_ 3 втратами в ста лі АР С _ Н при ненасиченому режимі роботи, визначають допустиму потужність випробуваного двигуна АР, СЕН Рдоп=Рншляхом зміни напруги від 0,81Ін до 1,21 UH визначається миттєва потужність, що споживається двигуном і її гармонійний склад, порівнюється гармонійний склад миттєвої потужності з гармонійним складом вібрацій двигуна, що випробується, визначається залежність вібрацій від змінної складової миттєвої потужності, по отриманих характеристиках рівня гармонік струму статора і нерівномірності насичення сталі статора визначають допустиме навантаження випробуваного двигуна 2 Спосіб по п 1, який відрізняється тим, що втрати в сталі визначаються для кожної фази окремо, вибирається більше значення потужності з трьох можливих, розраховується допустима потужність Рдоп=Рн-^ Д Р СЕН З Пристрій для реалізації способу за п 1, що включає асинхронний двигун з короткозамкненим ротором, підключений до мережі через тиристорний ре Винахід відноситься до електротехніки, а саме до систем випробування та діагностики електричних двигунів змінного струму, переважно асинхронних Дослідженнями встановлено, що через зниження якісних характеристик електротехнічної сталі і ЗМІНІ даних обмоток асинхронних двигунів, що пройшли ремонт, істотно зростають втрати в сталі, що приводять до зниження навантажувальної здатності електричних машин Збільшення втрат багато в чому пов'язано з ростом ступеня насичення сталі При насиченні, струм в обмотках стає несинусоїдальним із складним гармонічним складом, причому рівень гармонік пов'язаний зі ступенем насичення Відомий спосіб випробування асинхронного двигуна [Вольдек А И Электрические машины Учебник для студентов высш техн учебн заведений Изд 2е, перераб и до п - Л Энергия, 1974], що полягає у подачі на статор напруги промислової частоти із змінною амплітудою При цьому шляхом зміни напруги на замискачах статора визначають рівень струму, споживаного з мережі За рівнем цього струму роблять висновок щодо ступеня насичення сталі двигуна та його працездатності Спосіб має недолік, який полягає у наступному При намагнічуванні сталі по обмотках проходить несинусоїдальний струм При цьому вищі гармоніки струму замикаються як через контур статора, так і через ротор Для вищих гармонік ковзання ротора наближається до одиниці Отже відомий метод не дає точних результатів у відношенні ступеня насичення сталі Відоме технічне рішення по патенту України №50116, кл G01R31/34 «Спосіб випробування асинхронного трифазного електродвигуна і пристрій для його здійснення» Суть цього способу і пристрою полягає в тому, що електричний двигун підключаєть гулятор напруги, систему датчиків напруги і струмів фаз статора, датчик швидкості асинхронного двигуна, блок зв'язку з об'єктом, обчислювальний блок із пристроєм відображення інформації, який відрізняється тим, що він додатково обладнаний потенціалрегулятором з електромеханічним блоком керування, системою датчиків вібрацій двигуна по трьох ортогональних осях, тиристорним регулятором, обладнаним системою керування з пофазним керуванням напругою фаз, причому перший-дванадцятий входи блоку зв'язку з об'єктом зв'язані з трьома датчиками струму, трьома датчиками напруги, трьома датчиками вібрацій, датчиком швидкості обертання ротора двигуна, керуючі виходи блоку зв'язку з об'єктом, зв'язані ВІДПОВІДНО з входом електромеханічного блоку керування потенціал-регулятора і входом блоку керування тиристорним регулятором з пофазним керуванням тиристорами, причому показник вібрацій двигуна визначається як середньоквадратичне вібрацій Вх, Ву, Bz по трьох взаємно перпендикулярних осях В=ЛВ порівнюють рівень вібрацій В з допустимим Вд та ророблять висновок про працездатність двигуна ся до джерела трифазної змінної напруги, амплітуда якої може встановлюватися на необхідному рівні (від номінальної до величини, що перевищує номінальний рівень) У колі статора асинхронного двигуна, що працює в режимі холостого ходу, вимірюють пофазно напруги і струми, роблять гармонійний аналіз струмів і напруг, виділяють амплітуди і фази першої гармоніки, при відомих параметрах ненасиченого двигуна визначають ДІЮЧІ значення і фази першої гармоніки ЕРС контуру намагнічування, викликаною процесами в контурі при нелінійній кривій намагнічування електротехнічної сталі (насичення відбувається при напругах, близьких до номінальної чи більше неї) За результатами розрахунку параметрів ЕРС намагнічування визначається значення індуктивності контуру намагнічування, яке порівнюється зі значенням її в ненасиченому стані, і роблять висновок про ступінь насичення сталі Недоліки характерні для відомого способу полягають у наступному - працездатність двигуна при підвищеній напрузі в кінцевому результаті визначається зростаючими втратами в сталі, ростом загальних втрат, перегрівом ізоляції Загальні втрати в сталі залежать від опору контуру намагнічування і частоти струму, причому в ступені досить близькому до 2,0, - не врахування вищих гармонійних струму намагнічування приводить до помилок у визначенні зниження працездатності електричної машини, - при виконанні досліджень без механічного навантаження на валу двигуна втрати в сталі, МІДІ, втрати на подолання моменту холостого ходу (потужність механічних втрат) приблизно однакові 3 цієї причини не враховувати потужність механічних втрат 62492 неприпустимо У відомому способі момент холостого ходу не враховується, - ступінь насичення сталі залежить не тільки від першої гармоніки струму, але і від вищих гармонік Не врахування цього факту також приводить до зниження оцінки якості ремонту електричної машини Розглянуте технічне рішення приймається прототипом, бо має СПІЛЬНІ суттєві ознаки з технічним рішенням, що пропонується Метою передбачуваного винаходу є підвищення точності визначення ступеня насичення сталі і допустимого навантаження двигуна при його експлуатації Винахід пояснюється кресленнями фіг1 Схема заміщення фази асинхронного двигуна з ЕРС Е в контурі намагнічування, фіг 2 Блок-схема пристрою для реалізації способу випробування асинхронного двигуна, фіг 3 Функціональна схема блоку керування, фіг 4 Діаграми сигналів на вході системи керування ТРН, фіг 5 Алгоритм визначення допустимої потужності двигуна, що випробується З метою підвищення точності визначення ступеня насичення сталі і можливого навантаження двигуна розглянемо Т-подібну схему заміщення (фіг 1) На відміну від контуру статора і ротора до складу контуру намагнічування входить ЕРС намагнічування Виходячи з того що в процесі аналізу контуру намагнічування приймається, що активний і реактивний опори є величинами ЛІНІЙНИМИ, ТО необхідно ввести додаткову ЕРС намагнічування, яка б реально відображала фізичний процес намагнічування Індекси, які приведені на фіг 1 індекс 1 - для ланцюга статора, тобто h - струм статора, Ri - активний опір статора і т інш , індекс 2 - для ланцюга ротора, індекс ц для ланцюга намагнічування, v - номер гармоніки Визначення втрат передбачає використання даних експерименту - знання залежностей напруги живлення Uc(t) і струму статора h(t), а також параметрів схеми заміщення з ненасиченою сталлю Ненасичені параметри х-і, Х2, х „ , Ri, R2, г„ можуть бути отримані при нерухомому роторі з напругою живлення 0,1 U H Опір х „ контуру намагнічування еквалентизовано за допомогою ЕРС змінного струму, склад якої невідомий Для визначення ортогональних складових ЕРС Е на кожній з гармонік (амплггудних значень), а також ортогональних складових струму ротора І2 У (амплітудних значень) і ковзання si складемо систему рівнянь енергобалансу на основі розкладання залежностей струмів і напруг на косинусні і синусні складові для v гармонік, рівень яких перевищує встановлений рівень (наприклад 2,5%) від рівня першої гармоніки струму • l a v ^ a v r v V ^ A U cavhav + U cbvhbv " h a v R 1 " h b v R 1 4av x v + V Jibv ~ ' 2 a v ?• c a v U i a v " ^ a v . ' + ^ b v l ' i b v " '2bv ) + R + |2 2 , і ,_ R 2 '2av ~ ~ + '2bv "T . ^v v + 1 1 1 1 2 K I I I I I2 K + 7Г uIcavHav ~ ТГ uIcbvHbv ~ 7Г HavR1 + т : IHbvR1 avhbv \ ~ ^ ( h b v - b b v ^ - v ^ + x . v - i hav x (hbv ~ hbv) + -j E a v ' (hav 1 ! /. . \ ~^tbvUibv 1 i2 Vbv)+-^Vav + X 2 vl2av l 2bv. ^ u cavhav + ~= ucbvHbv " 'iavhbv K 1 h a v - l 2 a v НІ h b v ~ ' 2 b v ) " v r M . ~ - 2 \2 1 ) + Jibv-l2bvJ+^Ebv(l1av-l2av, ' 2 a v ' 2 b v Відзначимо, що x = v -х ц - еквівалентний індуктивний опір ма гнітного контуру на v - й гармоніці, г = v a -г - опір, еквівалентний втратам в сталі на v-й гармоніці, а = 2 - коефіцієнт, втрат від частоти V - 1 + SH що враховує залежність Струм намагнічування (його амплітудне значення) знаходиться за наступними залежностями '(iav ~~ Mav ~~ '2аV і jibv _ і 1bv _ і 2bv • Отриману ЕРС контуру намагнічування дорівнюють до складової потокозчеплення контуру намагнічування Jibv ~'2bv. 2(EakcoskQt+EbksinkQt)=^(LJ1(t)-lJ1(t)) " ' 2 a v & — + X v 2 l 2 b v . v \ Jibv~l2bvi" v R _ і 2 - ' 2 b v — ~x2 s,, 2 Г v l ц~Х і 2av. 4Hav '2av. -bv Індуктивність контуру намагнічування є гармонійною функцією з періодом, який дорівнює тт, тому м апроксимаційна залежність має вигляд m І_ц(і:)= а 0 + 2 ( a a m c o s 2 m Q t + a b m s m 2 m Q t ) , 1 де ао а а т , аьт - коефіцієнти апроксимації 62492 З врахуванням сказаного вище, визначення апроксимаційних коефіцієнтів індуктивності ВІДПОВІДНИХ порядків можливо при вирішенні системи рівнянь, яка в загальному вигляді наведена нижче Е=ь coskQt = a0Elb|lvcosvnt + 1 -1 V ГП = vQ (cos[2m - v]Qt - cos[2m + v]ot) 2 і і v m 1 / г і -ZZa a m l b | l v (cos2m-v]a 2 і і V ГП + mQ С Е- a a m l b f l v (cos[v - 2m]Qt - cos[v + 2m]Qt) v rn • 2 Z abml 11 cos v mav E b k sinkQt = b ' ^ ( [ 2п cos + Ф* + v 2т [ " ])° 1 a0Ela sinvftt1 ^ •v m i - - Z Z - a am'ajxv (sin[v-2m]ot+sin[v + 2m]at)2 1 1 v •І m Z Z a vm ZZ-a, 11 v m Z Z 1 a b a m b m l m ' a l b ^ j J v ( W ( s ( b s m s i i [ n [ n [ 2 2 m v m v v 2 m p ] p o t + + t t S + s s i i n [ i n [ n 2 v [ 2 m m + + + v ] a v 2 ] O t ] ) Q ) ) m t t 1 З врахуванням того, що середні значення гармонійних функцій дорівнюють нулю, то розрахункове значення індуктивності насиченої сталі, обчислюється у ВІДПОВІДНОСТІ з наступним виразом і -1 -я •-цс "-цн а а т > де L ^ - індуктивність в ненасиченому стані Визначивши розрахункове значення індуктивності для кожної з фаз окремо, знаходимо середнє значення індуктивності L І +|. ер +| 3 е Д LaMc.LbMc.LcMc - розрахункове значення індуктивності для фази А, фази В, фази С ВІДПОВІДНО Коефіцієнт якості процесів перетворення енергії визначимо за наступним співвідношенням для кожної з фаз двигуна І / u \-\ L ^•100% ср де L(abc) - розрахункове значення індуктивності для фази А, В, С ВІДПОВІДНО Сумарні втрати в сталі двигуна визначають за формулою i=v ДР, ,v Порівнюють отримані втрати двигуна з втратами в сталі ЛРС£н П Р И ненасиченому режимі роботи і визначають допустиму потужність двигуна, що випроб усться Р - н доп — гР • г сЕн АР, 8 За алгоритмом (фіг 5) визначається допустима потужність двигуна Для визначення допустимого навантаження двигуна, який випробується на холостому ході, шляхом зміни декількох значень напруги від 0,8UH до 1,2UH визначається миттєва потужність, що споживається двигуном і її гармонійний склад Гармонійний склад миттєвої потужності порівнюється з гармонійним складом вібрацій двигуна, що випробується, причому показник вібрацій двигуна визначається як середньоквадратичне вібрацій Вх, Ву, Bz, по трьох взаємо перпендикулярних осях порівнюється рівень вібрацій В з допустимим рівнем Вд, визначається залежність вібрацій від змінної складової миттєвої потужності, по отриманим характеристикам рівня гармонік струму статора і нерівномірності насичення сталі статора визначають допустиме навантаження двигуна, який випробується Запропонований спосіб випробування асинхронного трифазного двигуна з короткозамкненим ротором реалізований за допомогою пристрою, приведеного на фіг 2, таким чином Асинхронний двигун 1 підключається через індукційний регулятор напруги 3 і силовий контактор 4 до мережі змінного струму Вимір напруги мережі і струму статора роблять за допомогою датчиків струму 6 і датчиків напруги 7 Для візуального контролю використовується комплект вимірювальної апаратури 10 два вольтметри і три амперметри Швидкість машини, яка випробується, контролюється тахогенератором 9 За допомогою резисторних модулів 5 і 8 проводиться установка необхідних масштабів напруги і струму Електромеханічний блок керування 11 містить релейно-контакторну схему керування реверсивним приводом індукційного регулятора напруги Сигнали, зняті з датчиків 6 і 7 та датчиків вібрацій 12, тахогенератора 9, подаються на блок зв'язку 13, що містить у собі аналого-цифровий перетворювач Виходи блоку керування 14 з'єднані з ВІДПОВІДНИМИ керуючими електродами тиристорів блоку 2 ЕОМ 15, за допомогою програмного забезпечення виконує обробку сигналів і видає результати на блок реєстрації 16 На першому етапі випробувань визначаються параметри двигуна в ненасиченому стані сталі при напрузі живлення 0,1 UH і нерухомому роторі На другому етапі розраховуються параметри двигуна, що змінюються через насичення сталі, для відомих параметрів ненасиченої машини Для реалізації способу використовують обладнання, що дозволяє представити напругу і струм статора в цифровій формі, а також визначає гармонійний склад струмів і напруг у колі статора асинхронних двигунів При U=0,1UH здійснюють вимір струму статора h(t) і напруги мережі Uc(t), за допомогою датчиків напруги 7 і струму 6, у якості яких використовуються трансформатори струму і напруги (Umax=10B) В якості датчиків струму і напруги в пристрої можуть бути використані також універсальні датчики типу LT-100Р і LV-25-P (виробник фірма LEM, Швейцарія) компенсаційного типу, які базуються на ефекті Холу Датчик струму LT-100-P призначений для електронного перетворення струмів постійного, змінного, імпульсного і т д - у пропорційний вихідний струм, з гальванічною розв'язкою між первинним (силовим) і вто 62492 10 який дорівнює нулю, тобто тиристорний регулятор повністю відкритий Програмне забезпечення установки здійснює первинну обробку сигналів Воно повинне мати інтуї(ПОСТІЙНІЙ, ЗМІННІЙ, імпульсній і т д ) у пропорційний тивно-зрозумілий інтерфейс користувача і підтримуструм Виходячи з технічних даних відносна погрішвати працездатність при мінімальній апаратній ність перетворення датчиків складає ±0,5% для датоснащеності ЕОМ 15 У зв'язку з цим найбільш причика струму, і ±0,6% для датчика напруги датним варіантом є створення програмного забезпеВ якості тахогенератора 9 використовується елечення в середовищі Turbo Vision для Pascal чи C++ ктромеханічний перетворювач Контроль вібраційних Визначення гармонійного складу струму і напрупараметрів по трьох осях двигуна здійснюється за ги в колі статора асинхронного двигуна проводиться допомогою датчиків вібрацій 12 Встановлення необза допомогою розкладання сигналів у ряд Фур'є на хідних масштабів напруги здійснюється за допомоЕОМ Для проведення експериментів використовугою резисторних модулів 5, 9 Розрахунковий модуль ється ЕОМ моделі 80286 або 80386SX, мінімальних установки містить блок зв'язку 13 з аналоговим переапаратних ресурсів яких досить для виконання потворювачем, блок репстрацм 16 - дісплей і принтер ставленої задачі Аналого-цифровий перетворювач здійснює поРежим насичення відповідає напрузі, що переслідовне опитування датчиків з частотою 45кГц, а вищує номінальну Тому за допомогою індукційного також забезпечує зв'язок комп'ютера із силовим морегулятора напруги 3, сигнал на який надходить з дулем Багатоканальний контролер АЦП AD7891 електромеханічного блоку керування 11, який містить являє собою завершений пристрій, що включає 8 у собі релейно-контакторну схему управління, збільканалів 12-розрядних АЦП, оперативношується напруга вище номінальної й аналогічно розапам'ятовуючий пристрій ОЗП обсягом 8/32Кх12 біт, биться розрахунок параметрів двигуна з врахуванчого досить для визначення з високою точністю паням насичення раметрів двигуна, що випробується 3 цифрового Запропонований спосіб випробування асинхронвиходу АЦП сигнали надходять на блок керування 14 ного трифазного двигуна з короткозамкненим ротосистеми тиристорного регулятора напруги 2 До ром дозволить підвищити точність визначення стускладу блоку 14 входить мікроконтролер фірми пеня насичення сталі і допустимого навантаження Microchip, наприклад, серії РІСІбхх, фірми Atmel двигуна при після ремонти их випробуваннях, і може Motorola серій НС05, НС08 та інш 3 виходу мікроконбути реалізований за допомогою запропонованого тролера сигнали надходять на три системи імпульспристрою но-фазового керування СІФК (для окремого регулюПозитивний ефект від використання запропоновання напруги фаз) тиристорного регулятора напруваного способу полягає у тому, що з його допомогою ги Функціональна схема блоку 14 приведена на фіг можливо визначити допустиму потужність випробуЗ Діаграми сигналів, що пояснюють роботу системи ваного двигуна, що дозволяє експлуатувати асинхкерування ТРН приведені на фіг 4, де а т а х - сигнал, ронний двигун в умовах, які враховують його реальні що відповідає кугу керування, який не дорівнює нувластивості лю, а т , п - сигнал, що відповідає кугу керування, ринним (вимірювальним) ланцюгами Датчик напруги LV-25-P побудований за принципом перетворення вхідного струму, пропорційно прикладеній напрузі ФЇГ 1 Схема заміщення фази асинхронного двигуна з ЕРС Е„ в контурі намагнічування 11 12 62492 1 г СІФК1 СІФК2 СІФКЗ 2 3 14 1 • г Фіг З Функціональна схема блоку керування 13 62492 14 Фіг 4 Діаграми сигналів ша вході системи керування ТРН вимірювання напруги мережі та струму статора розкладання залежностей в ряд Фур'є , визначення гармонійних складових складання системи рівнянь енергобапанса визначення ортогональних складових Е Р С , контура ротора, контура намагнічування ковзання на першій гармоніці знаходження залежності визначення розрахункового значення індуктивності насиченої етапі для кожної з фаз двигуна розрахунок середнього значення індуктивності насиченої сталі озрахунок коефіцієнта ЯКОСТІ процесів перетворення енергії Фіг.5 Алгоритм визначення допустимої потужності двигуна, що випробується Комп'ютерна верстка Н Лисенко Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for testing an asynchronous three-phase cage motor and the device for the realization of the method
Автори англійськоюRodkin Dmytro Yosypovych, Chornyi Oleksii Petrovych, Kalinov Andrii Petrovych
Назва патенту російськоюСпособ испытаний асинхронного трехфазного электродвигателя с короткозамкнутым ротором и устройство для осуществления способа
Автори російськоюРодькин Дмитрий Иосифович, Черный Алексей Петрович, Калинов Андрей Петрович
МПК / Мітки
МПК: G01R 31/34
Мітки: двигуна, короткозамкненим, спосіб, трифазного, випробування, реалізації, ротором, асинхронного, пристрій
Код посилання
<a href="https://ua.patents.su/7-62492-sposib-viprobuvannya-asinkhronnogo-trifaznogo-dviguna-z-korotkozamknenim-rotorom-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб випробування асинхронного трифазного двигуна з короткозамкненим ротором та пристрій для його реалізації</a>
Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення
Номер патенту: 36060
Опубліковано: 16.04.2001
Автори: Чорний Олексій Петрович, Сисюк Геннадій Юрійович, Долженко Віктор Володимирович, Пасмурских Олександр Олексійович, Вошун Олексій Миколайович, Луговой Анатолій Васильович, Родькін Дмитро Йосипович, Добрецов Володимир Валентинович
МПК: G01R 31/34
Мітки: спосіб, пристрій, ротором, діагностики, асинхронного, здійснення, двигуна, параметрів, короткозамкненим
Формула / Реферат:
1. Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, в відключенні статорних обмоток від мережі в момент переходу струму через нуль, вимірюванні залишкової напруги після відключення, який відрізняється тим, що в момент відключення вимірюють стрибок напруги на затискачах статора...
Спосіб випробування асинхронного трифазного електродвигуна та пристрій для його здійснення
Номер патенту: 50116
Опубліковано: 15.10.2002
Автори: Здор Ігор Євгенович, Артамонов Володимир Володимирович, Гераскін Олександр Сергійович, Барвінок Дмитро Володимирович, Бурлаченко Анатолій Васильович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: випробування, трифазного, спосіб, асинхронного, електродвигуна, пристрій, здійснення
Формула / Реферат:
1. Спосіб випробування асинхронного трифазного електродвигуна з короткозамкненим ротором, який полягає у під'єднанні статора двигуна до трифазної симетричної мережі через симетричний трифазний регулятор напруги, у зміні кутів управління перетворювача, який відрізняється тим, що при напрузі, зниженій до 0,25Uн, і великих кутах регулювання перетворювача вимірюють токи та напругу у трьох фазах, визначають параметри схеми заміщення двигуна при S...
Спосіб гальмування асинхронного двигуна та пристрій для його реалізації
Номер патенту: 62098
Опубліковано: 15.12.2003
Автори: Чорний Олексій Петрович, Гладир Андрій Іванович, Огарь Олександр Сергійович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: двигуна, реалізації, пристрій, асинхронного, гальмування, спосіб
Формула / Реферат:
1. Спосіб гальмування асинхронного двигуна, що включає підключення асинхронного двигуна через тиристорний регулятор напруги із системою імпульсно-фазового керування до джерела промислової частоти, який відрізняється тим, що розраховують різницю між завданням і фактичною швидкістю обертання, сигнал похибки подають на генератор і формують вихідний сигнал на систему імпульсно-фазового керування у вигляді періодичного сигналу з частотою близько...
Пристрій для пуску асинхронного електродвигуна з короткозамкненим ротором
Номер патенту: 39987
Опубліковано: 16.07.2001
Автор: Слободянюк Віктор Костянтинович
МПК: H02P 1/16
Мітки: ротором, асинхронного, короткозамкненим, пуску, пристрій, електродвигуна
Формула / Реферат:
Пристрій для пуску асинхронного електродвигуна з короткозамкненим ротором, який містить кінематично з'єднані розгінний електродвигун, пружну передачу, асинхронний електродвигун з датчиком швидкості, під'єднаний до джерела живлення, блок управління, що містить пускач з контактами, кнопку "Пуск", кнопку "Стоп" і проміжне реле з контактами, під'єднане до датчика швидкості, який відрізняється тим, що блок управління...
Спосіб регулювання напруги асинхронного вентільного генератора з короткозамкненим ротором
Номер патенту: 7773
Опубліковано: 26.12.1995
Автори: Колесніченко Олександр Владимірович, Вишневський Леонід Вікторович, Пасс Анатолій Єгорович
МПК: H02P 9/00
Мітки: напруги, генератора, регулювання, спосіб, ротором, вентільного, асинхронного, короткозамкненим
Формула / Реферат:
Способ регулирования напряжения асинхронного вентильного генератора с короткозамкнутым ротором, заключающийся в том, что измеряют напряжение на выходе генератора, сравнивают его с заданным и формируют сигнал рассогласования, коммутируют вентили тиристорного источника реактивной мощности, отличающийся тем, что, с целью повышения динамической точности и устойчивости процесса регулирования, выделяют основную гармонику фазного напряжения на...
Попередній патент: Спосіб діагностики зубцевої зони пакетів електротехнічної сталі електричних машин
Наступний патент: Спосіб визначення соціально-психологічного стану людини
Випадковий патент: Установка для піролізу вуглеводневої сировини