Акустичний рівнемір
Номер патенту: 61645
Опубліковано: 25.07.2011
Автори: Сєвєріна Вікторія Віталіївна, Кизима Володимир Іванович, Науменко Ігор Якович, Данилов Валерій Якович


Формула / Реферат
1. Акустичний рівнемір, що включає мірну трубку, вставлену у резервуар, подовжувач мірної трубки, оборотний перетворювач акустичного сигналу, вхід якого з'єднано з першим входом електронного комутатора, генератор сигналу зондування, вихід якого з'єднано з другим входом електронного комутатора, підсилювач сигналу, вихід якого з'єднаний зі входом смугового фільтра, а вхід - з виходом електронного комутатора, який відрізняється тим, що в нього введено конічну насадку, що з'єднує подовжувач мірної трубки з самою мірною трубкою, корпус з акустичним резонатором, що з'єднує кінець подовжувача мірної трубки з акустичним перетворювачем, мікроконтролер, перший вхід якого з'єднано з другим виходом генератора сигналу зондування, а перший вихід через узгоджувальний пристрій з'єднано зі входом генератора сигналу зондування, другий вхід мікроконтролера з'єднано з виходом смугового фільтра, а другий його вихід через систему часового автоматичного регулювання підсилення з'єднано з керуючим входом підсилювача сигналу і, крім того, перший інформаційний вихід мікроконтролера через радіомодем з'єднано з радіоантеною, другий інформаційний вихід з'єднано з оперативним запам'ятовуючим пристроєм, а третій - з індикаторним пристроєм.
2. Акустичний рівнемір за п. 1, який відрізняється тим, що за оборотний перетворювач акустичного сигналу вибрано перетворювач згинного типу, встановлений безпосередньо на верхньому кінці мірної трубки.
Текст
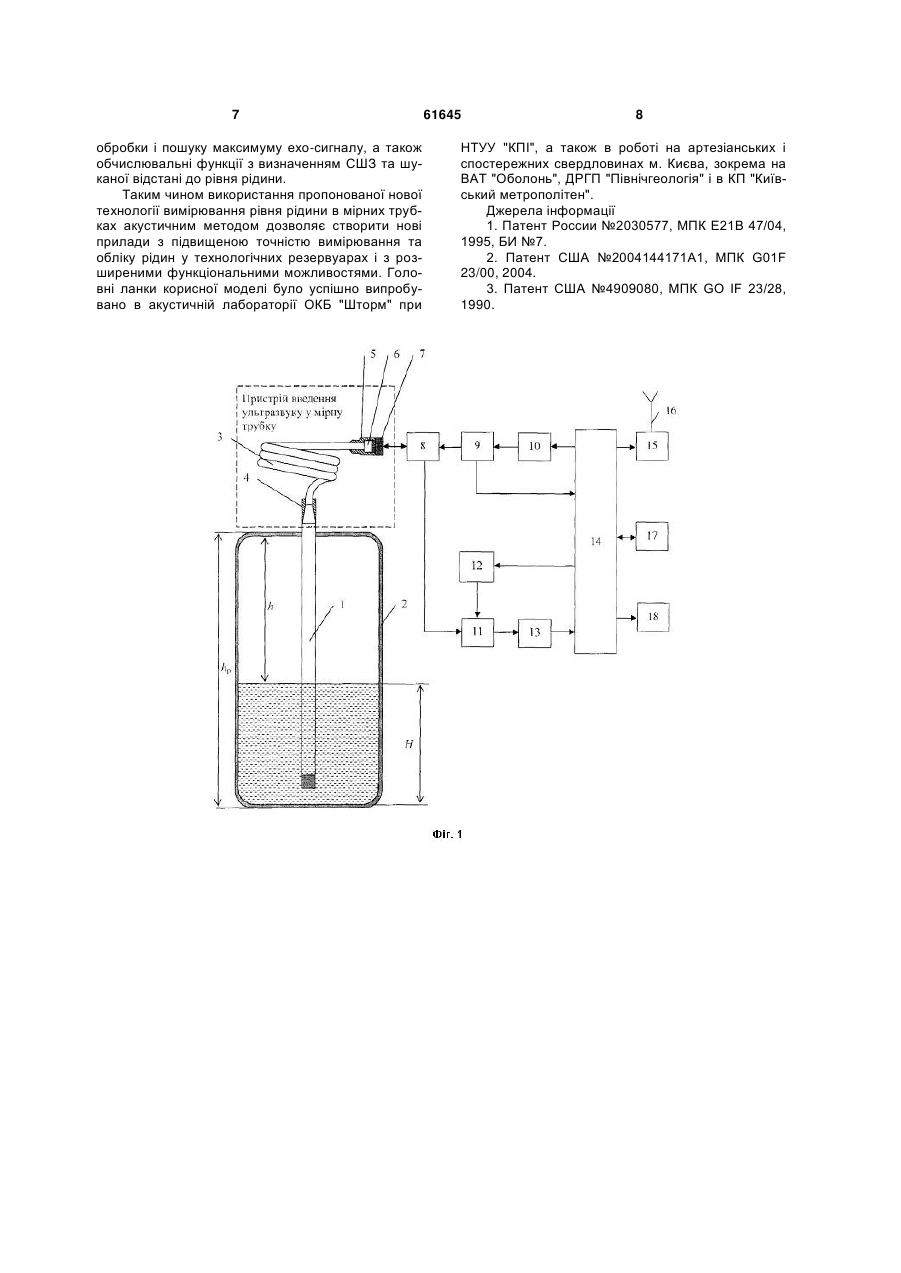
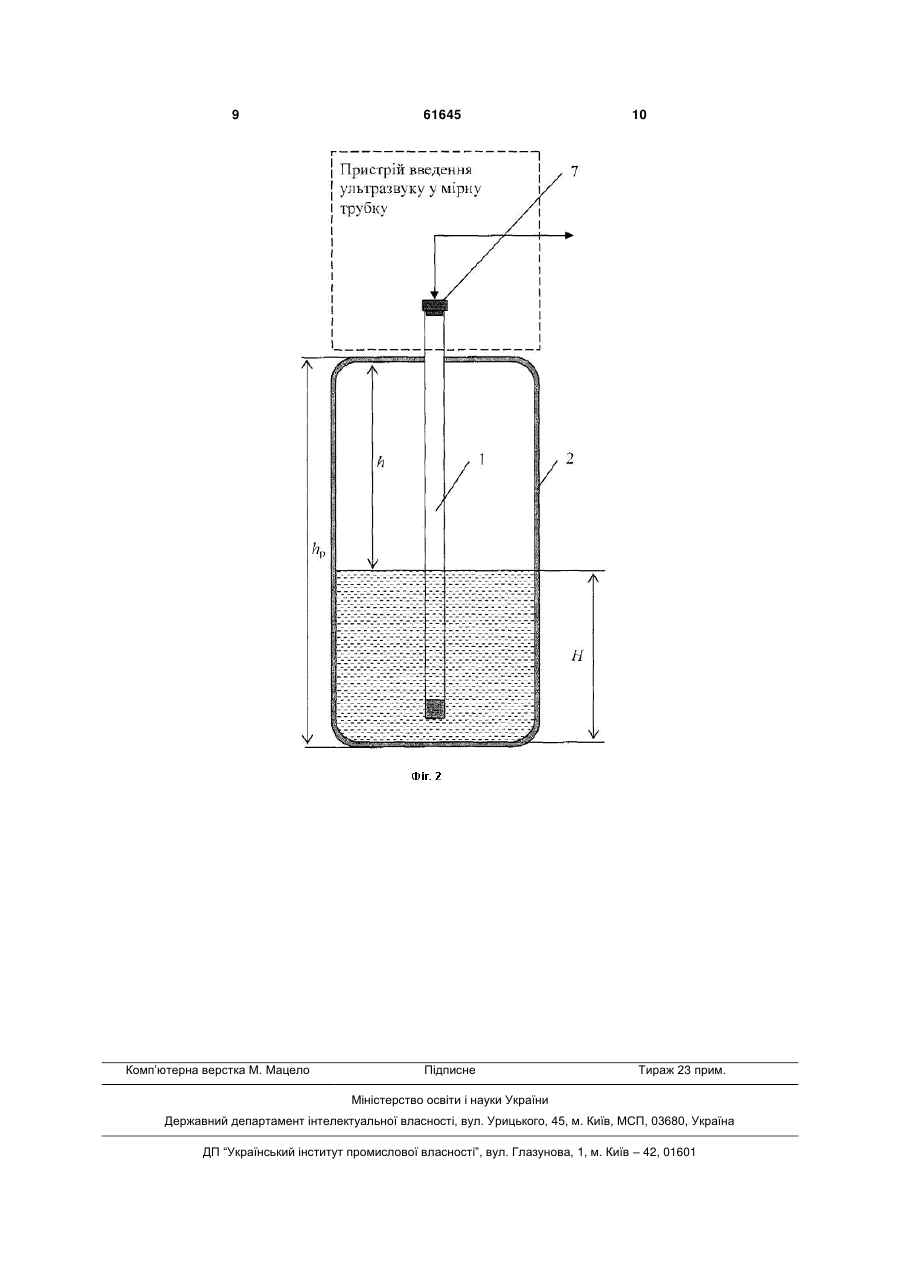
1. Акустичний рівнемір, що включає мірну трубку, вставлену у резервуар, подовжувач мірної трубки, оборотний перетворювач акустичного сигналу, вхід якого з'єднано з першим входом електронного комутатора, генератор сигналу зондування, вихід якого з'єднано з другим входом електронного комутатора, підсилювач сигналу, вихід якого з'єднаний зі входом смугового фільтра, а вхід - з виходом електронного комутатора, який відрізняється тим, що в нього введено конічну насадку, що з'єднує подовжувач мірної трубки з U 1 3 температура, статичний тиск, хімічний склад, а також від їхнього розподілу вздовж шляху поширення. Такі умови типові, наприклад, під час роботи акустичних рівнемірів в технологічних резервуарах зі світлими нафтопродуктами та іншими рідинами, а також в автомобільних баках з пальним. У відомому пристрої врахування СШЗ зовсім відсутнє, що в умовах коливань температури зовнішнього середовища та хімічного складу газу призведе до значних похибок у вимірюванні рівня рідини. Це є головним недоліком найближчого аналога при використанні його як рівнеміра пального у баках автомобілів і технологічних резервуарах. В основу корисної моделі поставлено задачу підвищити точність вимірювання відстані до рідини навіть за умови відсутності апріорних даних зі швидкості звуку у середовищі хвилеводу, додаткових мірних трубок, реперів та інших допоміжних відбивачів звуку. Особливістю корисної моделі, є вибір хвильового розміру мірної трубки та випромінювача певним чином, а саме так, щоб у ній існували хвилі 0-го та вищих ступенів. Оскільки ці хвилі мають різні швидкості поширення, то на кожний імпульс зондування матимемо кілька ехосигналів від рівня рідини, зміщених за часом. Визначивши часові затримки кожного з отриманих ехо-сигналів відносно моменту зондування можемо розрахувати СШЗ у середовищі, що знаходиться всередині хвилеводу. Далі обчислення рівня рідини відбувається подібно найближчому аналогу - як півдобуток затримки хвилі 0-го ступеня на отриману швидкість звуку. Таким чином пропонована корисна модель не потребує будь-яких апріорних даних зі швидкості звуку, термодатчиків, реперів або інших додаткових засобів, які зазвичай використовуються у відомих пристроях. Поставлена задача вирішується тим, що в акустичному рівнемірі, що містить мірну трубку, вставлену у резервуар, подовжувач мірної трубки, оборотний перетворювач акустичного сигналу, вхід якого з'єднано з першим входом електронного комутатора, генератор сигналу зондування, вихід якого з'єднано з другим входом електронного комутатора, підсилювач сигналу, вихід якого з'єднаний зі входом смугового фільтра, а вхід - з виходом електронного комутатора, згідно з корисною моделлю, новим є те, що в нього введено конічну насадку, що з'єднує подовжувач мірної трубки з самою мірною трубкою, корпус з акустичним резонатором, що з'єднує кінець подовжувача мірної трубки з акустичним перетворювачем, мікроконтролер, перший вхід якого з'єднано з другим виходом генератора сигналу зондування, а перший вихід через узгоджувальний пристрій з'єднано зі входом генератора сигналу зондування, другий вхід мікроконтролера з'єднано з виходом смугового фільтра, а другий вихід через систему часового автоматичного регулювання підсилення з'єднано з керуючим входом підсилювача сигналу і, крім того, перший інформаційний вихід мікроконтролера через радіомодем з'єднано з радіоантеною, другий інформаційний вихід з'єднано з оперативним запам'ятовуючим пристроєм, а третій - з індикаторним пристроєм. Новим є також те, що за оборот 61645 4 ний перетворювач акустичного сигналу вибрано перетворювач згинного типу, встановлений безпосередньо на верхньому кінці мірної трубки. Таке функціональне вирішення акустичного рівнеміра за рахунок використання хвиль 0-го та вищих ступенів, для яких, згідно з корисною моделлю, створюються умови для поширення у середовищі мірної трубки, дозволяє врахувати СШЗ у мірній трубці безпосередньо під час вимірювання без використання будь-яких додаткових засобів (додаткових мірних трубок, реперів, термодатчиків) і обчислити точну відстань до рідини. Поряд з підвищенням точності це значно спрощує конструкцію приладу. Введення конічної насадки створює умови для поширення хвиль вищих ступенів, а акустичний резонатор підвищує завадостійкість корисної моделі. За допомогою мікроконтролера виконується не тільки обчислення шуканої відстані до рідини, а й керування процесом зондування, приймання ехо-сигналів та оптимальна їхня обробка. Отримувані в процесі вимірювань дані по бездротовому зв'язку (через радіомодем) можуть передаватися до системи вищого рівня. Таке функціональне вирішення корисної моделі поряд з підвищенням точності дозволяє створити компактний автономний пристрій, який можна використовувати не тільки в стаціонарних умовах, а й на автомобілях та інших транспортних засобах. На фіг. 1 зображено структурну схему акустичного рівнеміра, на фіг.2 наведено інший варіант пристрою введення ультразвуку у мірну трубку. Пристрій складається з мірної трубки 1 (фіг. 1, фіг.2), вставленої в резервуар 2, подовжувача мірної трубки 3, один кінець якого через рупорну насадку 4, з'єднано з мірною трубкою 1, а інший кінець - з корпусом 5, що містить акустичний резонатор 6. З іншого боку в корпусі 5 встановлено оборотний перетворювач акустичного сигналу 7, вихід якого з'єднано з першим входом електронного комутатора 8 (фіг.1). Пристрій містить також генератор сигналу зондування 9, перший вихід якого з'єднано з другим входом електронного комутатора 8, а вхід - з виходом узгоджувального пристрою 10, підсилювач сигналу 11, перший вхід якого з'єднано з виходом електронного комутатора 8, другий вхід з'єднано з виходом системи часового автоматичного регулювання підсилення 12, а вихід - з входом смугового фільтра 13. Крім того, пристрій містить також мікроконтролер 14, перший вхід якого з'єднано з другим виходом генератора сигналу зондування 9, а другий вхід - з виходом узгоджувального пристрою 10; перший вихід мікроконтролера 14 з'єднано з входом узгоджувального пристрою 10, а другий вихід - з входом системи часового автоматичного регулювання підсилення 12. З іншого боку перший інформаційний вихід мікроконтролера 14 через радіомодем 15 з'єднано з радіоантеною 16, другий його інформаційний вихід - з оперативним запам'ятовуючим пристроєм 17, а третій - з індикаторним пристроєм 18. В даному разі за оборотний перетворювач акустичного сигналу 7 вибрано перетворювач згинного типу, встановлений безпосередньо на верхньому кінці мірної трубки 1. 5 Пристрій, що пропонується, працює наступним чином. Мікроконтролер 14 генерує сигнали керування ультразвуковим рівнеміром, а також сигнали періодичного збудження генератора зондувального сигналу 9, що потрапляють на його вхід через узгоджувальний пристрій 10. Часові діаграми основних сигналів керування та ехо-сигналів, що надходять з мірної трубки 1, наведено на фіг.3. Як бачимо, на виході узгоджувального пристрою 10 генеруються відеоімпульси з періодом повторення Т3, що відповідає періоду зондування мірної трубки 1. На виході генератора зондувального сигналу 9 маємо радіоімпульси заданої частоти ω, які, крім того, вводяться у мікроконтролер як копія зондувального сигналу. Далі через електронний комутатор 8 сигнали зондування потрапляють на оборотний акустичний перетворювач 7, перетворюються на акустичний сигнал, який через подовжувач мірної трубки 3 і рупорну насадку 4 вводиться у мірну трубку. Оборотний акустичний перетворювач 7, подовжувач мірної трубки 3 і рупорна насадка 4 складають пристрій введення ультразвуку у мірну трубку. Хвильові розміри мірної трубки вибираються таким чином, щоб в ній існувало як мінімум дві хвилі - хвиля 0-го ступеня і хвиля 1-го ступеня. Поширюючись у мірній трубці з різними груповими швидкостями, ці хвилі досягають рівня рідини, відбиваються від нього і тим же шляхом почергово потрапляють на оборотний акустичний перетворювач 7, а потім через електронний комутатор 8 на підсилювач сигналу 11. Таким чином на виході смугового фільтра 13 або на другому вході мікроконтролера 14 з'являється як мінімум пара ехосигналів, рознесена в часі. Вигляд отриманої таким чином ехограми ілюструється на фіг. 3 часовою діаграмою 1.3. В процесі приймання кожної ехограми задля раціонального використання розрядної сітки мікроконтролера 14 в структуру корисної моделі введено систему часового автоматичного регулювання підсилення 12. Дія цієї системи в період між двома найближчими зондуваннями ілюструється відповідною часовою діаграмою 12 на фіг.3. Таким чином на другий вхід мікроконтролера 14 подаються ехо-сигнали з різними затримками відносно моменту зондування - 0 та 1 . Мікроконтролер 14 виконує функції оптимальної обробки отриманих ехо-сигналів з використанням їхньої копії, визначення їхніх затримок 0 , 1 та обчислення СШЗ у мірній трубці і відстані до рідини h. Отримані таким чином дані накопичуються в оперативному запам'ятовуючому пристрої 17, відображаються на індикаторному пристрої 18 і через радіомодем 15 і радіоантену 16 передаються у систему вищого рівня. В загальному випадку на виході смугового фільтра 13 матимемо короткі відбиття кожної з хвиль, що існують у мірній трубці 1, з відповідними затримками відносно моменту зондування n, значення яких визначають за допомогою оптимального тракту приймання з використанням відомих процедур пошуку максимуму обвідної взаємнокореляційної функції. Головна функція корисної моделі полягає у визначенні СШЗ у середовищі мірної трубки за формулою: 61645 6 r 1 0 , n n де - кругова частота, на якій відбувається зондування; r - радіус мірної трубки; n - нулі функції Бесселя 1-го порядку. Далі шукана відстань до рідини h обчислюється як півдобуток отриманої середньої швидкості звуку на часову затримку хвилі 0-го ступеня: c h 0 0 , 2 Підвищення точності вимірювання відстані при використанні пропонованої корисної моделі відбувається за рахунок того, що в умовах відсутності апріорних даних зі швидкості звуку за рахунок використання ехо-сигналів хвиль вищих порядків і врахування параметрів хвилеводу вдається не тільки обчислити СШЗ у мірній трубці, а й точну відстань до рідини. Це здійснюється введенням в корисну модель оборотного перетворювача 7 згинного типу, корпуса 5 з резонатором 6 та рупорної насадки 4, завдяки чому у мірній трубці утворюються хвилі вищих ступенів, а також введенням мікроконтролера 14, що здійснює оптимальну обробку ехо-сигналу та розрізнення хвиль різних ступенів. Досягнення такого результату неможливе за відомим методом, оскільки в ньому необхідно встановлювати додатковий хвилевід, в якому СШЗ може значно відрізнятися від фактичного її значення в основному. Крім того, в багатьох випадках встановлення додаткових хвилеводів, датчиків температури або реперів недоцільне або неможливе з технологічних причин (артезіанські видобувні та спостережні свердловини, технологічні резервуари, паливні баки автомобілів). Це значно розширює функціональні можливості корисної моделі і сферу її застосування. В разі, якщо вимоги до величини мертвої зони невеликі, що буває, наприклад, у великих резервуарах з пальним, від використання подовжувача мірної трубки 3, рупорної насадки 4 та корпусу 5 можна відмовитись, встановивши оборотний акустичний перетворювач 7 безпосередньо на верхньому кінці мірної трубки 1 (див. фіг.2). В такому разі оборотний акустичний перетворювач 7 має бути згинного типу, щоб у мірній трубці 1 могли збуджуватись хвилі вищих ступенів. Поєднання в корисній моделі, що пропонується, зазначених нововведень, що дозволяють одночасно підвищити точність вимірювань і розширити її функціональні можливості, значно підвищує ефективність створених за нею пристроїв і систем, відкриваючи низку нових можливостей, а саме, можливість вимірювання в умовах значних коливань рівня рідини у ємностях, температури та наявності періодичних змін вертикального температурного градієнта. Такі умови бувають під час вимірювання рівня пального у баках автомобілів. Корисна модель може бути реалізована на сучасній елементній базі, наявній на ринку України. Ядром її може бути мікроконтролер MSP430 фірми Texas Instruments, що може виконувати функції формування зондуючого сигналу, оптимальної c0 7 обробки і пошуку максимуму ехо-сигналу, а також обчислювальні функції з визначенням СШЗ та шуканої відстані до рівня рідини. Таким чином використання пропонованої нової технології вимірювання рівня рідини в мірних трубках акустичним методом дозволяє створити нові прилади з підвищеною точністю вимірювання та обліку рідин у технологічних резервуарах і з розширеними функціональними можливостями. Головні ланки корисної моделі було успішно випробувано в акустичній лабораторії ОКБ "Шторм" при 61645 8 НТУУ "КПІ", а також в роботі на артезіанських і спостережних свердловинах м. Києва, зокрема на ВАТ "Оболонь", ДРГП "Північгеологія" і в КП "Київський метрополітен". Джерела інформації 1. Патент России №2030577, МПК Е21В 47/04, 1995, БИ №7. 2. Патент США №2004144171А1, МПК G01F 23/00, 2004. 3. Патент США №4909080, МПК GO IF 23/28, 1990. 9 Комп’ютерна верстка М. Мацело 61645 Підписне 10 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAcoustic level meter
Автори англійськоюNaumenko Ihor Yakovych, Kyzyma Volodymyr Ivanovych, Danylov Valerii Yakovych, Severina Viktoria Vitaliivna
Назва патенту російськоюАкустический уровнемер
Автори російськоюНауменко Игорь Яковлевич, Кизима Владимир Иванович, Данилов Валерий Яковлевич, Северина Виктория Витальевна
МПК / Мітки
МПК: G01F 23/00
Мітки: рівнемір, акустичний
Код посилання
<a href="https://ua.patents.su/5-61645-akustichnijj-rivnemir.html" target="_blank" rel="follow" title="База патентів України">Акустичний рівнемір</a>
Акустичний детектор
Номер патенту: 66899
Опубліковано: 15.06.2004
Автори: Перепада Борис Антонович, Чернега Віктор Степанович, Федоров Вадим Валерійович
МПК: G01M 3/24
Мітки: акустичний, детектор
Формула / Реферат:
Акустичний детектор протікання трубопроводів, що містить послідовно з'єднані мікрофон, блок обробки сигналів, підсилювач потужності, регулятор гучності, головні телефони, який відрізняється тим, що в нього введені послідовно з'єднані аналізатор спектра, вхід якого з'єднаний з виходом підсилювача блока обробки сигналу, блок керування дисплейним індикатором і дисплейний індикатор, блок керування, з'єднаний з керуючим входом смугового фільтра,...
Оптичний рівнемір
Номер патенту: 44707
Опубліковано: 12.10.2009
Автори: Борщова Ірина Петрівна, Довгалець Сергій Михайлович
МПК: G01F 23/00
Формула / Реферат:
Оптичний рівнемір, що містить джерело випромінювання, оптичний хвилевід, який відрізняється тим, що в нього введено спектроаналізатор, вихід якого пов'язаний з входом блока обробки, вхід спектроаналізатора пов'язаний з виходом оптичного хвилеводу, вхід якого пов'язаний з виходом джерела випромінювання, причому джерело випромінювання є немонохромним, а оптичний хвилевід являє собою діелектричний стержень з серцевиною, що має від'ємний показник...
Ультразвуковий рівнемір

Номер патенту: 33879
Опубліковано: 15.02.2001
Автори: Лазебний Віктор Степанович, Тертишний Євген Віталійович
МПК: G01F 23/28
Мітки: рівнемір, ультразвуковий
Текст:
...входом тригера 9, об'єднаним із входами обнуління першого 10 і другого 11 лічильників пристрою керування настроюванням 6. Вихід тригера 9 пристрою керування настроюванням 6 з'єднаний з другим керуючим входом приймача 16 пристрою прийому-передачи 2 та з другим входом логічного елемента І 8 пристрою керування настроюванням 6. Вихід логічного елемента І 8 з'єднаний з лічильним входом першого лічильника 10, інформаційний вихід якого з'єднаний з...
Акустичний пристрій для вимірювання рівня рідини в свердловинах
Номер патенту: 68307
Опубліковано: 15.07.2004
Автори: Кизима Володимир Іванович, Науменко Ігор Якович
МПК: E21B 47/04
Мітки: рідини, пристрій, рівня, акустичний, свердловинах, вимірювання
Формула / Реферат:
Акустичний пристрій для вимірювання рівня рідини в свердловинах, що містить акустичний приймач, підсилювач сигналу, генератор тактових імпульсів, генератор відеоімпульсів та індикаторний пристрій, який відрізняється тим, що в нього введено генератор частотно-модульованого сигналу, вихід якого через підсилювач потужності з'єднано з широкосмуговим випромінювачем, узгоджувальний пристрій, вхід якого з'єднано з виходом акустичного приймача та...
Дискретний рівнемір
Номер патенту: 13857
Опубліковано: 25.04.1997
Автори: Політучий Олександр Іванович, Миргородський Михайло Мефодієвич
МПК: G01F 23/24
Мітки: рівнемір, дискретний
Формула / Реферат:
Дискретний рівнемір рідини, вміщуючий поплавок. немагнітну вимірювальну трубу, реверсивний електронний лічильник з електронним комутатором на вході та блоком індикації рівня на виході, який відрізняється тим, що в середині рухомої немагнітності вимірювальної труби, з'єднаної з поплавком, по всій її висоті разміщені пасивні металеві елементи з кроком, рівним дискретності вимірювання, а зовні на неї надіті з зазором нерухомо тороїдальні...
Попередній патент: Спосіб оперативного визначення октанового числа бензинів
Наступний патент: Спосіб неінвазивних досліджень функціонального стану організму “оксітерм”
Випадковий патент: Спосіб отримання плівки кубічного gan на підкладці з поруватого шару gaas