Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів і мбд та розширеними можливостями
Номер патенту: 61884
Опубліковано: 25.07.2011
Автори: Коломійцев Олексій Володимирович, Клівець Сергій Іванович, Козіна Ольга Андріївна, Рубан Ігор Вікторович, Васильєв Дмитро Геннадійович, Дорошенко Юрій Іванович, Сачук Ігор Іванович, Шостак Анатолій Васильович, Альошин Геннадій Васильович, Пєвцов Геннадій Володимирович
Формула / Реферат
Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів і МБД та розширеними можливостями, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод з багаточастотним розділенням каналів (СПМБРК), передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми "і", реверсивні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину та ∆vм оп - введення опорних сигналів з частотами міжмодових биттів (∆vм оп, 2∆vм оп, 3∆vм оп, 6∆vм оп) від передавального лазера, який відрізняється тим, що після СПМБРК замість блока дефлекторів введено модифікований блок дефлекторів та після ШП замість багатофункціонального інформаційного блока введено інформаційний блок з розширеними можливостями із б - введенням сигналу тангенціальної складової швидкості (кутових швидкостей) літального апарата, що виміряна.
Текст
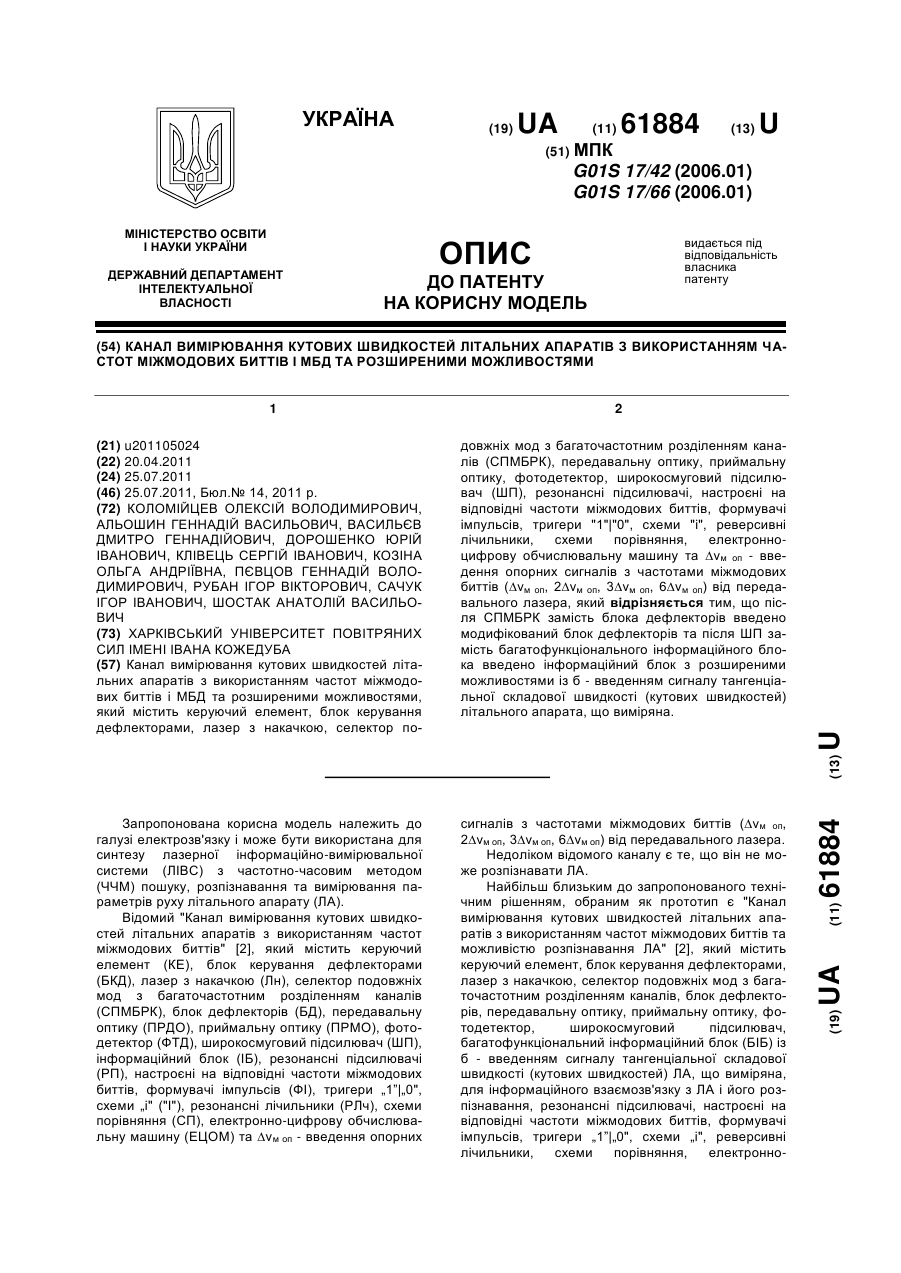
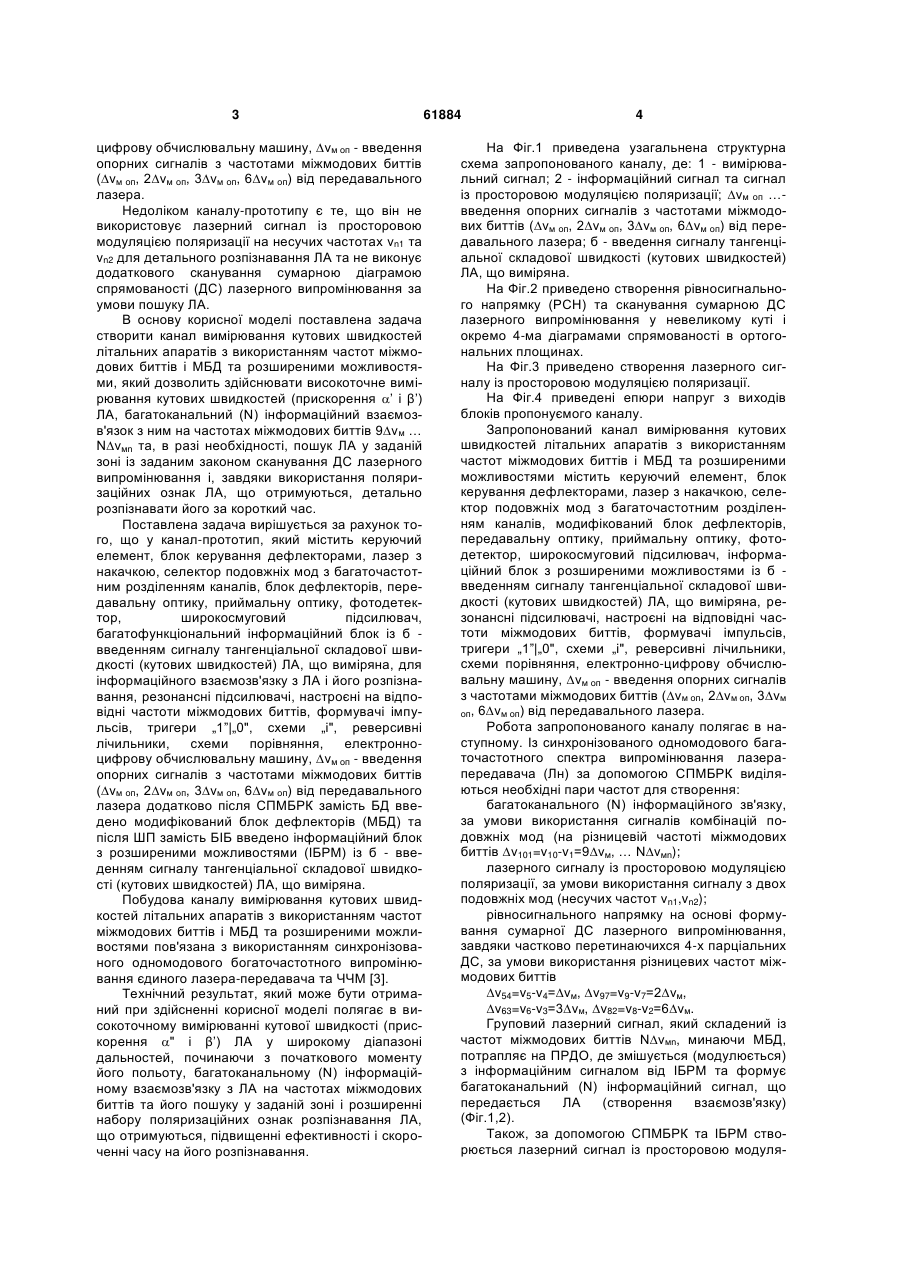
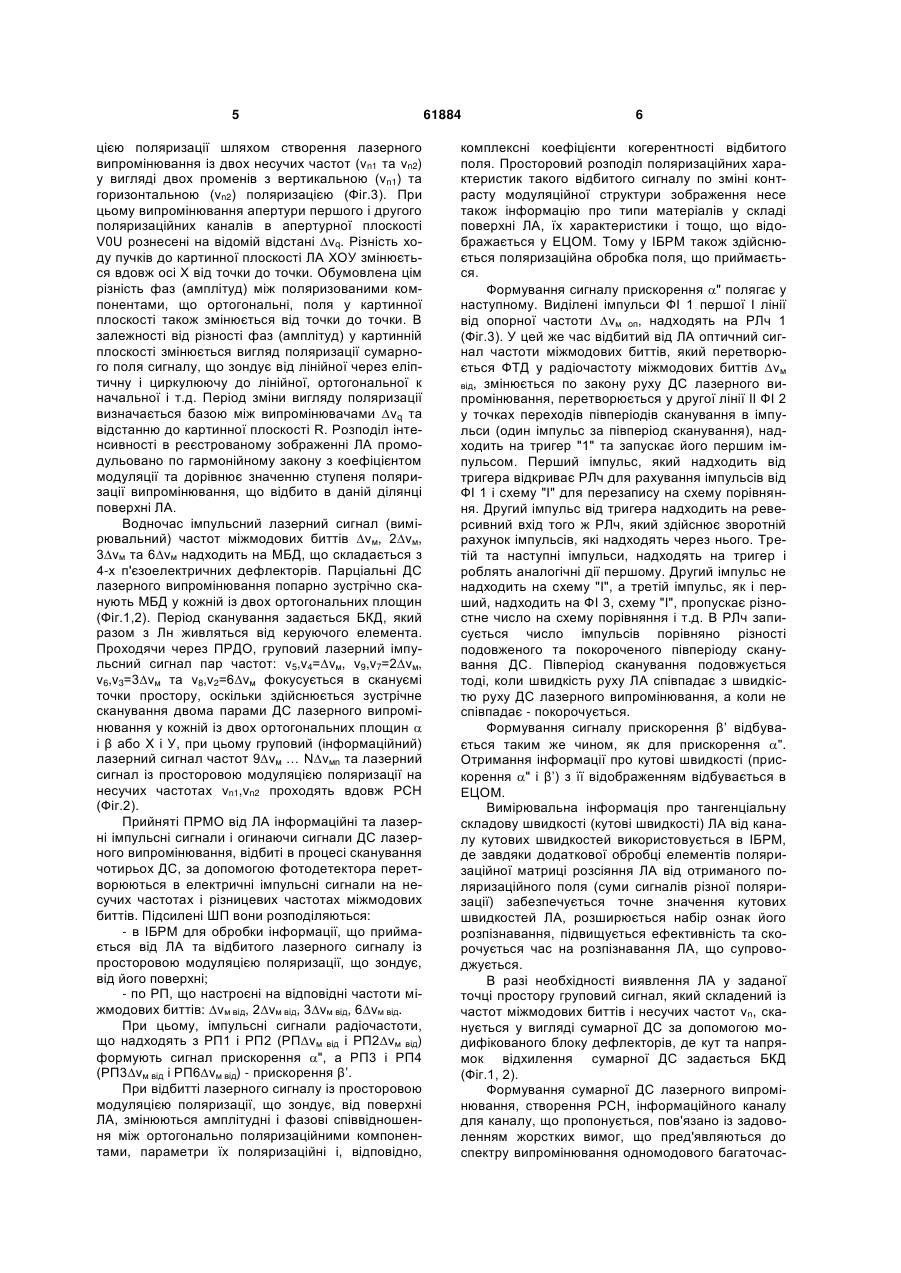
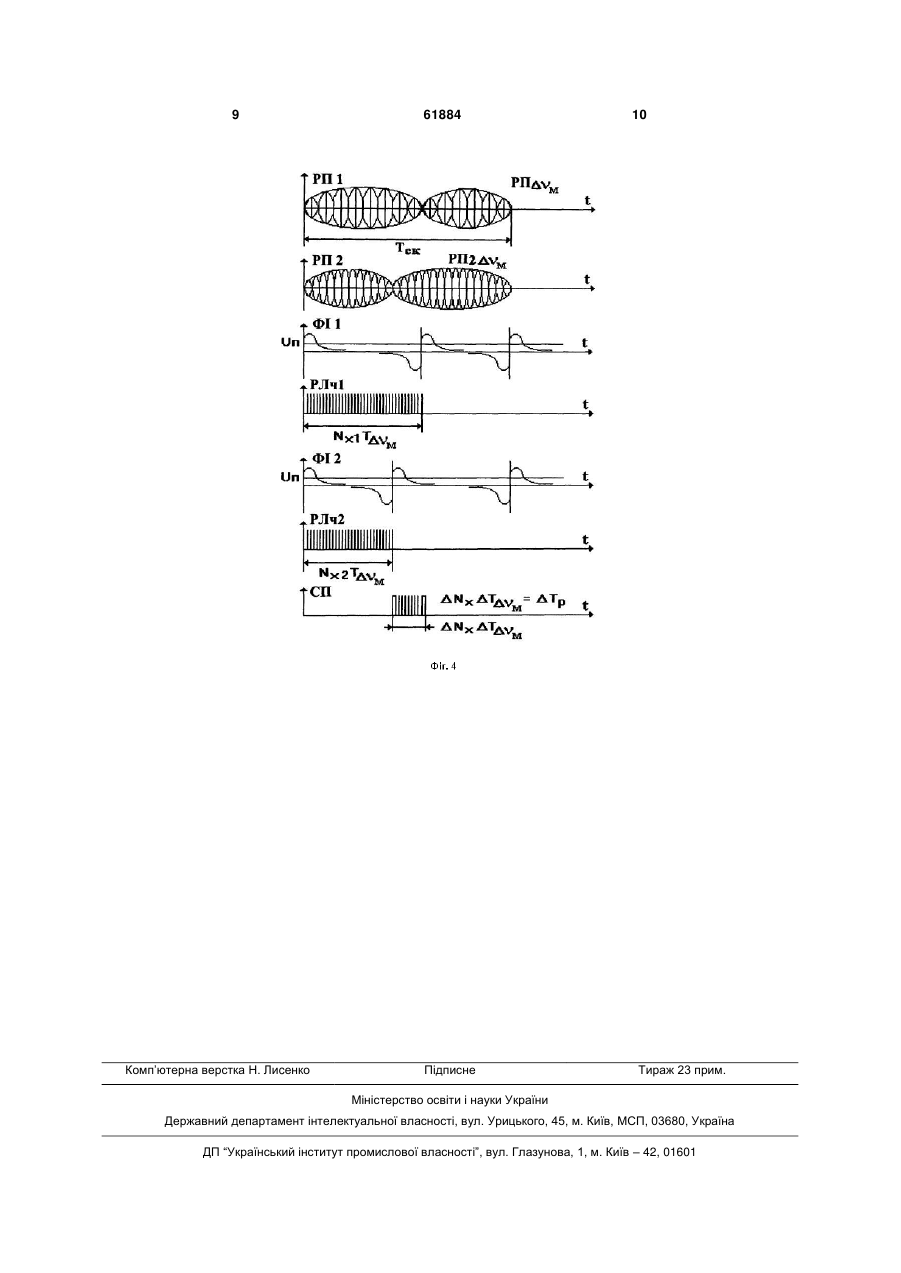
Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів і МБД та розширеними можливостями, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор по 3 цифрову обчислювальну машину, ∆vм оп - введення опорних сигналів з частотами міжмодових биттів (∆vм оп, 2∆vм оп, 3∆vм оп, 6∆vм оп) від передавального лазера. Недоліком каналу-прототипу є те, що він не використовує лазерний сигнал із просторовою модуляцією поляризації на несучих частотах vn1 та vn2 для детального розпізнавання ЛА та не виконує додаткового сканування сумарною діаграмою спрямованості (ДС) лазерного випромінювання за умови пошуку ЛА. В основу корисної моделі поставлена задача створити канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів і МБД та розширеними можливостями, який дозволить здійснювати високоточне вимірювання кутових швидкостей (прискорення ’ і β’) ЛА, багатоканальний (N) інформаційний взаємозв'язок з ним на частотах міжмодових биттів 9∆vм … N∆vмn та, в разі необхідності, пошук ЛА у заданій зоні із заданим законом сканування ДС лазерного випромінювання і, завдяки використання поляризаційних ознак ЛА, що отримуються, детально розпізнавати його за короткий час. Поставлена задача вирішується за рахунок того, що у канал-прототип, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод з багаточастотним розділенням каналів, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, багатофункціональний інформаційний блок із б введенням сигналу тангенціальної складової швидкості (кутових швидкостей) ЛА, що виміряна, для інформаційного взаємозв'язку з ЛА і його розпізнавання, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери „1”|„0", схеми „і", реверсивні лічильники, схеми порівняння, електронноцифрову обчислювальну машину, ∆vм оп - введення опорних сигналів з частотами міжмодових биттів (∆vм оп, 2∆vм оп, 3∆vм оп, 6∆vм оп) від передавального лазера додатково після СПМБРК замість БД введено модифікований блок дефлекторів (МБД) та після ШП замість БІБ введено інформаційний блок з розширеними можливостями (ІБРМ) із б - введенням сигналу тангенціальної складової швидкості (кутових швидкостей) ЛА, що виміряна. Побудова каналу вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів і МБД та розширеними можливостями пов'язана з використанням синхронізованого одномодового богаточастотного випромінювання єдиного лазера-передавача та ЧЧМ [3]. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає в високоточному вимірюванні кутової швидкості (прискорення " і β’) ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, багатоканальному (N) інформаційному взаємозв'язку з ЛА на частотах міжмодових биттів та його пошуку у заданій зоні і розширенні набору поляризаційних ознак розпізнавання ЛА, що отримуються, підвищенні ефективності і скороченні часу на його розпізнавання. 61884 4 На Фіг.1 приведена узагальнена структурна схема запропонованого каналу, де: 1 - вимірювальний сигнал; 2 - інформаційний сигнал та сигнал із просторовою модуляцією поляризації; ∆vм оп …введення опорних сигналів з частотами міжмодових биттів (∆vм оп, 2∆vм оп, 3∆vм оп, 6∆vм оп) від передавального лазера; б - введення сигналу тангенціальної складової швидкості (кутових швидкостей) ЛА, що виміряна. На Фіг.2 приведено створення рівносигнального напрямку (РСН) та сканування сумарною ДС лазерного випромінювання у невеликому куті і окремо 4-ма діаграмами спрямованості в ортогональних площинах. На Фіг.3 приведено створення лазерного сигналу із просторовою модуляцією поляризації. На Фіг.4 приведені епюри напруг з виходів блоків пропонуємого каналу. Запропонований канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів і МБД та розширеними можливостями містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод з багаточастотним розділенням каналів, модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, інформаційний блок з розширеними можливостями із б введенням сигналу тангенціальної складової швидкості (кутових швидкостей) ЛА, що виміряна, резонансні підсилювачі,настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери „1”|„0", схеми „і", реверсивні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину, ∆vм оп - введення опорних сигналів з частотами міжмодових биттів (∆vм оп, 2∆vм оп, 3∆vм оп, 6∆vм оп) від передавального лазера. Робота запропонованого каналу полягає в наступному. Із синхронізованого одномодового багаточастотного спектра випромінювання лазерапередавача (Лн) за допомогою СПМБРК виділяються необхідні пари частот для створення: багатоканального (N) інформаційного зв'язку, за умови використання сигналів комбінацій подовжніх мод (на різницевій частоті міжмодових биттів ∆v101=v10-v1=9∆vм, … N∆vмn); лазерного сигналу із просторовою модуляцією поляризації, за умови використання сигналу з двох подовжніх мод (несучих частот vn1,vn2); рівносигнального напрямку на основі формування сумарної ДС лазерного випромінювання, завдяки частково перетинаючихся 4-х парціальних ДС, за умови використання різницевих частот міжмодових биттів ∆v54=v5-v4=∆vм, ∆v97=v9-v7=2∆vм, ∆v63=v6-v3=3∆vм, ∆v82=v8-v2=6∆vм. Груповий лазерний сигнал, який складений із частот міжмодових биттів N∆vмn, минаючи МБД, потрапляє на ПРДО, де змішується (модулюється) з інформаційним сигналом від ІБРМ та формує багатоканальний (N) інформаційний сигнал, що передається ЛА (створення взаємозв'язку) (Фіг.1,2). Також, за допомогою СПМБРК та ІБРМ створюється лазерний сигнал із просторовою модуля 5 цією поляризації шляхом створення лазерного випромінювання із двох несучих частот (vn1 та vn2) у вигляді двох променів з вертикальною (vn1) та горизонтальною (vn2) поляризацією (Фіг.3). При цьому випромінювання апертури першого і другого поляризаційних каналів в апертурної плоскості V0U рознесені на відомій відстані ∆vq. Різність ходу пучків до картинної плоскості ЛА ХОУ змінюється вдовж осі X від точки до точки. Обумовлена цім різність фаз (амплітуд) між поляризованими компонентами, що ортогональні, поля у картинної плоскості також змінюється від точки до точки. В залежності від різності фаз (амплітуд) у картинній плоскості змінюється вигляд поляризації сумарного поля сигналу, що зондує від лінійної через еліптичну і циркулюючу до лінійної, ортогональної к начальної і т.д. Період зміни вигляду поляризації визначається базою між випромінювачами ∆vq та відстанню до картинної плоскості R. Розподіл інтенсивності в реєстрованому зображенні ЛА промодульовано по гармонійному закону з коефіцієнтом модуляції та дорівнює значенню ступеня поляризації випромінювання, що відбито в даній ділянці поверхні ЛА. Водночас імпульсний лазерний сигнал (вимірювальний) частот міжмодових биттів ∆vм, 2∆vм, 3∆vм та 6∆vм надходить на МБД, що складається з 4-х п'єзоелектричних дефлекторів. Парціальні ДС лазерного випромінювання попарно зустрічно сканують МБД у кожній із двох ортогональних площин (Фіг.1,2). Період сканування задається БКД, який разом з Лн живляться від керуючого елемента. Проходячи через ПРДО, груповий лазерний імпульсний сигнал пар частот: v5,v4=∆vм, v9,v7=2∆vм, v6,v3=3∆vм та v8,v2=6∆vм фокусується в скануємі точки простору, оскільки здійснюється зустрічне сканування двома парами ДС лазерного випромінювання у кожній із двох ортогональних площин і β або X і У, при цьому груповий (інформаційний) лазерний сигнал частот 9∆vм … N∆vмn та лазерний сигнал із просторовою модуляцією поляризації на несучих частотах vn1,vn2 проходять вдовж РСН (Фіг.2). Прийняті ПРМО від ЛА інформаційні та лазерні імпульсні сигнали і огинаючи сигнали ДС лазерного випромінювання, відбиті в процесі сканування чотирьох ДС, за допомогою фотодетектора перетворюються в електричні імпульсні сигнали на несучих частотах і різницевих частотах міжмодових биттів. Підсилені ШП вони розподіляються: - в ІБРМ для обробки інформації, що приймається від ЛА та відбитого лазерного сигналу із просторовою модуляцією поляризації, що зондує, від його поверхні; - по РП, що настроєні на відповідні частоти міжмодових биттів: ∆vм від, 2∆vм від, 3∆vм від, 6∆vм від. При цьому, імпульсні сигнали радіочастоти, що надходять з РП1 і РП2 (РП∆vм від і РП2∆vм від) формують сигнал прискорення ", а РП3 і РП4 (РП3∆vм від і РП6∆vм від) - прискорення β’. При відбитті лазерного сигналу із просторовою модуляцією поляризації, що зондує, від поверхні ЛА, змінюються амплітудні і фазові співвідношення між ортогонально поляризаційними компонентами, параметри їх поляризаційні і, відповідно, 61884 6 комплексні коефіцієнти когерентності відбитого поля. Просторовий розподіл поляризаційних характеристик такого відбитого сигналу по зміні контрасту модуляційної структури зображення несе також інформацію про типи матеріалів у складі поверхні ЛА, їх характеристики і тощо, що відображається у ЕЦОМ. Тому у ІБРМ також здійснюється поляризаційна обробка поля, що приймається. Формування сигналу прискорення " полягає у наступному. Виділені імпульси ФІ 1 першої І лінії від опорної частоти ∆vм оп, надходять на РЛч 1 (Фіг.3). У цей же час відбитий від ЛА оптичний сигнал частоти міжмодових биттів, який перетворюється ФТД у радіочастоту міжмодових биттів ∆vм від, змінюється по закону руху ДС лазерного випромінювання, перетворюється у другої лінії II ФІ 2 у точках переходів півперіодів сканування в імпульси (один імпульс за півперіод сканування), надходить на тригер "1" та запускає його першим імпульсом. Перший імпульс, який надходить від тригера відкриває РЛч для рахування імпульсів від ФІ 1 і схему "І" для перезапису на схему порівняння. Другий імпульс від тригера надходить на реверсивний вхід того ж РЛч, який здійснює зворотній рахунок імпульсів, які надходять через нього. Третій та наступні імпульси, надходять на тригер і роблять аналогічні дії першому. Другий імпульс не надходить на схему "І", а третій імпульс, як і перший, надходить на ФІ 3, схему "І", пропускає різностне число на схему порівняння і т.д. В РЛч записується число імпульсів порівняно різності подовженого та покороченого півперіоду сканування ДС. Півперіод сканування подовжується тоді, коли швидкість руху ЛА співпадає з швидкістю руху ДС лазерного випромінювання, а коли не співпадає - покорочується. Формування сигналу прискорення β’ відбувається таким же чином, як для прискорення ". Отримання інформації про кутові швидкості (прискорення " і β’) з її відображенням відбувається в ЕЦОМ. Вимірювальна інформація про тангенціальну складову швидкості (кутові швидкості) ЛА від каналу кутових швидкостей використовується в ІБРМ, де завдяки додаткової обробці елементів поляризаційної матриці розсіяння ЛА від отриманого поляризаційного поля (суми сигналів різної поляризації) забезпечується точне значення кутових швидкостей ЛА, розширюється набір ознак його розпізнавання, підвищується ефективність та скорочується час на розпізнавання ЛА, що супроводжується. В разі необхідності виявлення ЛА у заданої точці простору груповий сигнал, який складений із частот міжмодових биттів і несучих частот vn, сканується у вигляді сумарної ДС за допомогою модифікованого блоку дефлекторів, де кут та напрямок відхилення сумарної ДС задається БКД (Фіг.1, 2). Формування сумарної ДС лазерного випромінювання, створення РСН, інформаційного каналу для каналу, що пропонується, пов'язано із задоволенням жорстких вимог, що пред'являються до спектру випромінювання одномодового багаточас 7 тотного лазера-передавача, тобто високоточної синхронізації подовжніх мод і стабілізації частот міжмодових биттів. Кількість інформаційних каналів (N) залежить від кількості комбінацій парних мод (несучих частот vn), які мають необхідні вихідні характеристики для використання. ДЖЕРЕЛА ІНФОРМАЦІЇ: 1. Патент на корисну модель №48402, Україна, МПК G01S17/42, G01S17/66. Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів. /О.В.Коломійцев, В.В.Бєлімов, Д. Г. Васильєв та ін. - №U200911402; заяв. 09.11.2009; опубл. 10.03.2010; Бюл. №5-8с. 61884 8 2. Патент на корисну модель №55508, Україна, МПК G01S17/42, G01S17/66. Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів та можливістю розпізнавання ЛА. /О.В.Коломійцев, Г.В.Альошин, Д.Г.Васильєв та ін. - №u201008922; заяв. 16.07.2010; опубл. 10.12.2010; Бюл. №23.-8с. 3. Патент на корисну модель №55645, Україна, МПК G01S17/42, G01S17/66. Частотно-часовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарату. /О.В.Коломійцев №u201005225; заяв. 29.04.2010; опубл. 27.12.2010; Бюл. №24.-14с. 9 Комп’ютерна верстка Н. Лиcенко 61884 Підписне 10 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюChannel for measurement of angular rates of aircrafts with use of frequencies of inter-mode beats and advanced topics
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Alioshyn Hennadii Vasyliovych, Vasyliev Dmytro Hennadiiovych, Doroshenko Yurii Ivanovych, Klivets Serhii Ivanovych, Kozina Olha andriivna, Pevtsov Hennadii Volodymyrovych, Ruban Ihor Viktorovych, Sachuk Ihor Ivanovych, Shostak Anatolii Vasyliovych
Назва патенту російськоюКанал измерения угловых скоростей летательных аппаратов с использованием частот мижмодових биений и мбд и расширенными возможностями
Автори російськоюКоломийцев Алексей Владимирович, Алешин Геннадий Васильевич, Васильев Дмитрий Геннадьевич, Дорошенко Юрий Иванович, Кливец Сергей Иванович, Козина Ольга Андреевна, Певцов Геннадий Владимирович, Рубан Игорь Викторович, Сачук Игорь Иванович, Шостак Анатолий Васильевич
МПК / Мітки
МПК: G01S 17/66, G01S 17/42
Мітки: використанням, частот, літальних, канал, вимірювання, апаратів, кутових, міжмодових, мбд, швидкостей, можливостями, биттів, розширеними
Код посилання
<a href="https://ua.patents.su/5-61884-kanal-vimiryuvannya-kutovikh-shvidkostejj-litalnikh-aparativ-z-vikoristannyam-chastot-mizhmodovikh-bittiv-i-mbd-ta-rozshirenimi-mozhlivostyami.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів і мбд та розширеними можливостями</a>
Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів та розширеними можливостями
Номер патенту: 60331
Опубліковано: 10.06.2011
Автори: Козіна Ольга Андріївна, Шостак Анатолій Васильович, Приходько Володимир Мусійович, Сачук Ігор Іванович, Толстолузька Олена Геннадіївна, Приходько Дмитро Петрович, Макаров Сергій Анатолійович, Васильєв Дмитро Геннадійович, Лосєв Михайло Юрійович, Коломійцев Олексій Володимирович
МПК: G01S 17/66, G01S 17/42
Мітки: міжмодових, швидкостей, розширеними, літальних, канал, можливостями, вимірювання, апаратів, кутових, частот, биттів, використанням
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів та розширеними можливостями, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод з багаточастотним розділенням каналів, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів,...
Канал вимірювання радіальної швидкості літальних апаратів з використанням частот міжмодових биттів і мбд та розширеними можливостями
Номер патенту: 61879
Опубліковано: 25.07.2011
Автори: Рубан Ігор Вікторович, Шостак Анатолій Васильович, Дорошенко Юрій Іванович, Клівець Сергій Іванович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Сачук Ігор Іванович, Васильєв Дмитро Геннадійович, Пєвцов Геннадій Володимирович, Козіна Ольга Андріївна
МПК: G01S 17/66, G01S 17/42
Мітки: розширеними, частот, мбд, літальних, радіальної, міжмодових, биттів, вимірювання, можливостями, канал, швидкості, апаратів, використанням
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів з використанням частот міжмодових биттів і МБД та розширеними можливостями, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), селектор подовжніх мод з багаточастотним розділенням каналів (СПМБРК), передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових...
Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів та можливістю розпізнавання ла
Номер патенту: 55508
Опубліковано: 10.12.2010
Автори: Васильєв Дмитро Геннадійович, Хударковський Костянтин Ігорович, Приходько Володимир Мусійович, Копилов Олександр Олексійович, Злотніков Андрій Львович, Можаєв Олександр Олександрович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Сачук Ігор Іванович, Приходько Дмитро Петрович
МПК: G01S 17/66, G01S 17/42
Мітки: биттів, кутових, міжмодових, розпізнавання, частот, вимірювання, апаратів, швидкостей, використанням, канал, можливістю, літальних
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів та можливістю розпізнавання ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод з багаточастотним розділенням каналів, блок дефлекторів, передавальну оптику, приймаючу оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових...
Канал вимірювання похилої дальності до літальних апаратів з використанням частот міжмодових биттів і мбд та розширеними можливостями
Номер патенту: 61883
Опубліковано: 25.07.2011
Автори: Сачук Ігор Іванович, Альошин Геннадій Васильович, Пєвцов Геннадій Володимирович, Коломійцев Олексій Володимирович, Клівець Сергій Іванович, Рубан Ігор Вікторович, Васильєв Дмитро Геннадійович, Дорошенко Юрій Іванович, Шостак Анатолій Васильович, Козіна Ольга Андріївна
МПК: G01S 17/42, G01S 17/66
Мітки: апаратів, мбд, використанням, частот, розширеними, літальних, вимірювання, дальності, биттів, похило, можливостями, міжмодових, канал
Формула / Реферат:
Канал вимірювання похилої дальності до літальних апаратів з використанням частот міжмодових биттів і МБД та розширеними можливостями, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод з багаточастотним розділенням каналів (СПМБРК), призми для частоти міжмодових биттів , перемикач для частот міжмодових биттів
Канал вимірювання радіальної швидкості літальних апаратів з використанням частот міжмодових биттів та розширеними можливостями
Номер патенту: 60330
Опубліковано: 10.06.2011
Автори: Сачук Ігор Іванович, Коломійцев Олексій Володимирович, Лосєв Михайло Юрійович, Васильєв Дмитро Геннадійович, Козіна Ольга Андріївна, Толстолузька Олена Геннадіївна, Макаров Сергій Анатолійович, Шостак Анатолій Васильович, Приходько Володимир Мусійович, Приходько Дмитро Петрович
МПК: G01S 17/42, G01S 17/66
Мітки: апаратів, міжмодових, канал, швидкості, частот, биттів, можливостями, вимірювання, радіальної, використанням, розширеними, літальних
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів з використанням частот міжмодових биттів та розширеними можливостями, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), селектор подовжніх мод з багаточастотним розділенням каналів (СПМБРК), блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти...
Попередній патент: Канал вимірювання похилої дальності до літальних апаратів з використанням частот міжмодових биттів і мбд та розширеними можливостями
Наступний патент: Спосіб оцінки якості системи керування навчальним процесом
Випадковий патент: Спосіб регенерації відпрацьованих аніонообмінних смол аес з дезактивацією витісненням