Датчик зенітного і візирного кутів
Номер патенту: 68884
Опубліковано: 10.04.2012
Автори: Рижков Ігор Вікторович, Ковшов Геннадій Миколайович, Живцова Людмила Іванівна
Формула / Реферат
Датчик зенітного і візирного кутів, що містить циліндричний корпус, усередині якого жорстко закріплені три циліндричні спіральні трубки, заповнені рідинами, що не змішуються, який відрізняється тим, що дві трубки розташовані в площині осі чутливості перпендикулярно одна до одної, а третя - під кутом 90° до осі чутливості, при цьому всі вони мають однаковий розмір, укладені біфілярно в декілька шарів перпендикулярно осі чутливості та з'єднані з герметичними порожнинами нижньої частини корпусу, оснащеними мембранами із закріпленими на них безконтактними перетворювачами сили і безконтактними датчиками переміщення, підсилювачем зворотного зв'язку і опором зворотного зв'язку.
Текст
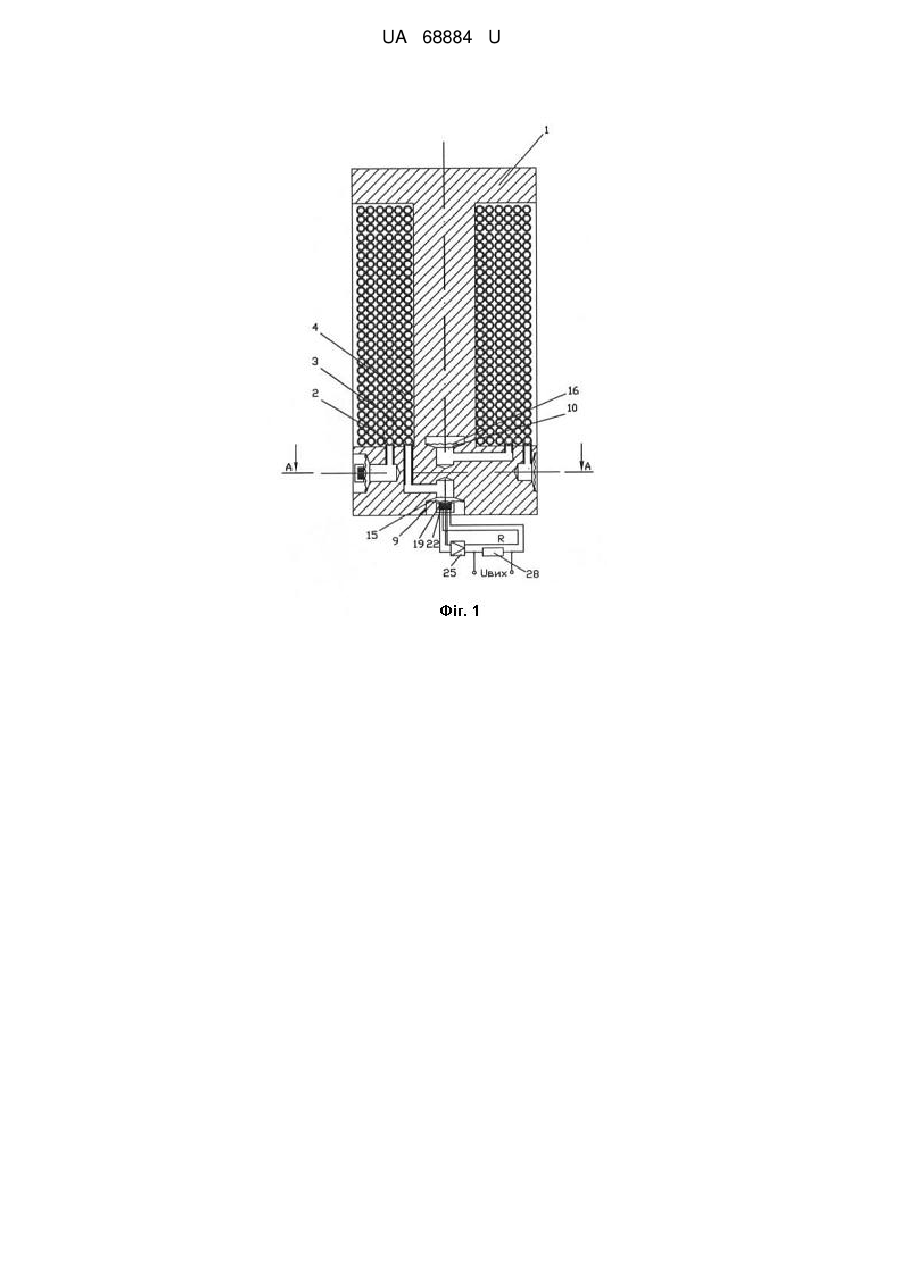
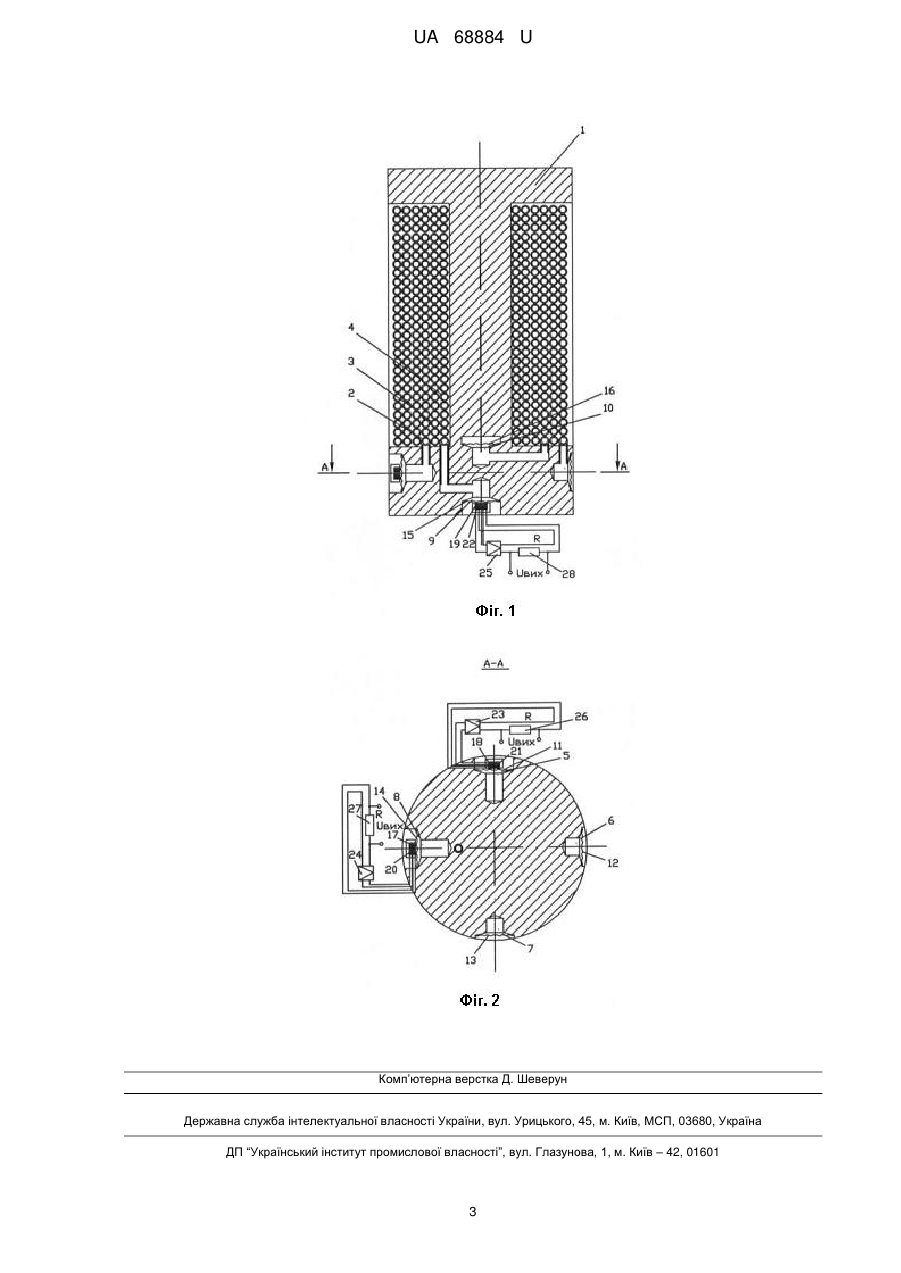
Реферат: Датчик зенітного і візирного кутів містить циліндричний корпус, усередині якого жорстко закріплені три циліндричні спіральні трубки, заповнені рідинами, що не змішуються. Дві трубки розташовані в площині осі чутливості перпендикулярно одна до одної, а третя - під кутом 90° до осі чутливості. Трубки мають однаковий розмір, укладені біфілярно в декілька шарів перпендикулярно осі чутливості та з'єднані з герметичними порожнинами нижньої частини корпусу, оснащеними мембранами із закріпленими на них безконтактними перетворювачами сили і безконтактними датчиками переміщення, підсилювачем зворотного зв'язку і опором зворотного зв'язку. UA 68884 U (54) ДАТЧИК ЗЕНІТНОГО І ВІЗИРНОГО КУТІВ UA 68884 U UA 68884 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до галузі промислової геофізики і може бути використана для контролю просторового положення стовбура свердловини в процесі буріння нафтових і газових свердловин. Відомий перетворювач зенітного кута, який містить заповнений рідиною корпус, рамку, в якій закріплений чутливий елемент забезпечений набором сполучених між собою трубок, встановлених ексцентрично, які заповнені двома рідинами, що не змішуються і включає кільцевий рівень з перегородкою [1]. Недоліком такого перетворювача зенітного кута є нераціональне використання чутливого елементу у вигляді кільцевого рівня, оскільки діаметр перетворювача обмежений діаметром бурильного знаряддя. Найбільш близьким технічним рішенням до даного запропонованого датчика зенітного і візирного кутів, є датчик зенітного і візирного кутів, що містить циліндричний корпус, усередині якого жорстко закріплені три циліндричні спіральні трубки, заповнені рідинами, що не змішуються. Нижня частина трубок виконана у вигляді паралельної співвісної з корпусом спіралі, а верхні кінці - у вигляді прямолінійних ділянок трубок, причому кути між площинами, що проходять крізь подовжню вісь корпусу і осі прямолінійних ділянок трубок, складають 120 [2]. Недоліком датчика є, те, що діапазон вимірювання зенітного кута лежить в межах від 0-90°. Завдання корисної моделі полягає в зменшенні габаритів, підвищенні точності і вібростійкості датчика зенітного і візирного кутів за рахунок зменшення частоти власних коливань чутливого елементу. Поставлена задача вирішується тим, що в датчику зенітного і візирного кутів, який містить циліндричний корпус, усередині якого жорстко закріплені три циліндричні спіральні трубки, заповнені рідинами, що не змішуються, відповідно до корисної моделі, дві трубки розташовані в площині осі чутливості перпендикулярно одна до одної, а третя - під кутом 90° до осі чутливості, при цьому всі вони мають однаковий розмір, укладені біфілярно в декілька шарів перпендикулярно осі чутливості та з'єднані з герметичними порожнинами нижньої частини корпусу, оснащеними мембранами із закріпленими на них безконтактними перетворювачами сили і безконтактними датчиками переміщення, підсилювачем зворотного зв'язку і опором зворотного зв'язку. Суть пропонуємої корисної моделі пояснюється графічними матеріалами, де на фіг.1 зображено загальний вигляд датчика зенітного і візирного кутів - вертикальний розріз, на фіг. 2 розріз А-А з фіг. 1. Датчик зенітного і візирного кутів містить циліндричний корпус 1, всередині якого перпендикулярно осі чутливості в декілька шарів біфілярно укладені три циліндричні спіральні трубки 2, 3, 4, які мають однаковий розмір та заповнені рідинами, що не змішуються, при цьому дві з них знаходяться в площині осі чутливості і повернуті одна до одної на 90°, а третя перпендикулярно осі чутливості. Усі циліндричні трубки з'єднані з герметичними порожнинами 5-10 нижньої частини корпусу 1 оснащеними мембранами 11-16, на мембранах 11, 14, 15 закріплені безконтактні перетворювачі сили 17, 18, 19 і безконтактні датчики переміщення 20, 21, 22, підсилювач зворотного зв'язку 23, 24, 25 і опір зворотного зв'язку 26, 27, 28. Датчик зенітного і візирного кутів працює таким чином. У початковому положенні зенітний і візирний кути дорівнюють нулю, із перетворювачів переміщення 20, 21, 22 знімається нульовий сигнал. При відхилені свердловини від вертикалі та повороті пристрою навколо подовжньої осі відбувається зсув рівня рідини в трубках 2, 3, 4 відносно площини нахилу датчика. В залежності від переміщення рідини мембрани 11-16 деформуються. З безконтактних датчиків переміщення 20, 21, 22 розташованих на мембранах 11, 14, 15 знімається електричний сигнал, який після посилення і перетворення поступає на перетворювачі сили 17, 18, 19, які повертають мембрани в початковий стан. Напруга Ui ( 1, 2, 3) на резисторі зворотного зв'язку 26, 27, 28 є вихідним сигналом з датчика зенітного і візирного кутів, яка пропорційна вимірюваній проекції вектора прискорення вільного падіння g на його вісь чутливості xx. Ui U0i Umi cos( g, xx) i 1 2,3 , , (1) U0i де Umi 55 i 1 2,3 , - нульовий сигнал датчика зенітного і візирного кутів. - найбільше значення вихідного сигналу з датчика зенітного і візирного кутів 1 Umi k i G , UA 68884 U U1 U01 Um1 b1 U2 U02 Um2 b2 U U U b 03 m3 3 3 (2) , де , i 1 2,3 - вихідні сигнали датчика зенітного і візирного кутів, приведені до безрозмірного вигляду. bi b1 cos( ) sin( ) b2 cos( ) sin( ) b cos( ) 3 (3) 5 Відповідно зенітний і візирний кути визначаються із співвідношення: arctg( arctg( 10 20 25 30 2 b1 (4) b2 2 b3 ) (5) Конструкція пропонованого датчика зенітного і візирного кутів значно збільшує довжину чутливого елементу, не збільшуючи при цьому габаритних розмірів корпусу і отже, дозволить зменшити частоту власних коливань. Для перетворювачів з рідинним чутливим елементом частота власних коливань визначається за формулою [3]: 0 15 b2 ) b1 2g l , (1/c) (6) де g - прискорення вільного падіння l - довжина чутливого елементу. Із співвідношення видно, що частота власних коливань 0 зворотно пропорційна довжині трубки і зменшується з її збільшенням. Таким чином, можна досягти значного зменшення со0, не збільшуючи при цьому діаметр датчика. Додаткова похибка від вібрації залежить від відстані між кінцями біфілярно укладених в декілька шарів циліндричних трубок, яка не обмежується діаметром бурильного знаряддя. Зменшення габаритів датчика зенітного і візирного кутів, при збереженні вібростійкості і точності датчика, дозволяє застосувати його в свердловинах малого діаметра. Окрім цього датчик зенітного і візирного кутів можна застосувати в процесі як турбінного, так і роторного буріння. Джерела інформації: 1. Авторское свидетельство СССР №992734, кл. Е 21 В 47/022, Публикация 30.01.1983, Бюллетень №4. 2. Авторское свидетельство СССР №1425311, кл. Е 21 В 47/02, Публикация 23.09.1988, Бюллетень №35, (прототип). 3. Вибрация в технике, под ред. Болотина В.В., М. - Машиностроение.-1973-386с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Датчик зенітного і візирного кутів, що містить циліндричний корпус, усередині якого жорстко закріплені три циліндричні спіральні трубки, заповнені рідинами, що не змішуються, який відрізняється тим, що дві трубки розташовані в площині осі чутливості перпендикулярно одна до одної, а третя - під кутом 90° до осі чутливості, при цьому всі вони мають однаковий розмір, укладені біфілярно в декілька шарів перпендикулярно осі чутливості та з'єднані з герметичними порожнинами нижньої частини корпусу, оснащеними мембранами із закріпленими на них безконтактними перетворювачами сили і безконтактними датчиками переміщення, підсилювачем зворотного зв'язку і опором зворотного зв'язку. 2 UA 68884 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDetector of zenith and sight angles
Автори англійськоюKovshov Hennadii Mykolaiovych, Ryzhkov Ihor Viktorovych, Zhyvtsova Liudmyla Ivanivna
Назва патенту російськоюДатчик зенитного и визирного углов
Автори російськоюКовшов Геннадий Николаевич, Рыжков Игорь Викторович, Живцова Людмила Ивановна
МПК / Мітки
МПК: E21B 47/02
Мітки: зенітного, кутів, візирного, датчик
Код посилання
<a href="https://ua.patents.su/5-68884-datchik-zenitnogo-i-vizirnogo-kutiv.html" target="_blank" rel="follow" title="База патентів України">Датчик зенітного і візирного кутів</a>
Компенсаційний датчик зенітного кута

Номер патенту: 26202
Опубліковано: 10.09.2007
Автори: Садовникова Олександра Володимирівна, Пономарьова Олена Анатоліївна, Ковшов Генадій Миколайович
МПК: E21B 47/02
Мітки: датчик, кута, компенсаційний, зенітного
Формула / Реферат:
Компенсаційний датчик зенітного кута, що містить корпус, котушку індуктивності, осердя, яке являє собою чутливий елемент датчика у вигляді тонкої берилієвої струни з пермалоєвим покриттям, закріпленої з одного кінця, який відрізняється тим, що датчик додатково обладнаний ланцюгом зворотного зв'язку з електромагнітом, а на вільному кінці чутливого елемента закріплений постійний магніт.
Датчик зенітного кута для вимірювання скривлення свердловин
Номер патенту: 7780
Опубліковано: 15.07.2005
Автори: Садовникова Олександра Володимирівна, Ковшов Генадій Миколайович
МПК: E21B 47/02
Мітки: датчик, скривлення, свердловин, вимірювання, зенітного, кута
Формула / Реферат:
Датчик зенітного кута для вимірювання скривлення свердловин, що містить корпус, спірально укладену трубку, заповнену рідиною, який відрізняється тим, що виходи трубки розвернуті в протилежні сторони і з'єднані з порожнинами, оснащеними мембранами, на яких закріплені рухомі елементи безконтактних датчиків сили і переміщення.
Двокоординатний датчик кутів нахилу

Номер патенту: 35954
Опубліковано: 16.04.2001
Автори: Худяков Борис Сергійович, Мрачковський Олег Дмитрович
МПК: G01C 9/00
Мітки: нахилу, двокоординатний, датчик, кутів
Формула / Реферат:
1. Двокоординатний датчик кутів нахилу, що містить рухомий електрод, жорстко зв'язаний з контрольованим об'єктом, нерухомий електрод у вигляді грушоподібного маятника і вимірювальну схему, підключену до рухомого електрода, який відрізняється тим, що рухомий електрод виконаний у вигляді порожньої півсфери, в центрі якої підвішено грушоподібний маятник, а сама півсфера поділена на чотири рівних електрично ізольованих один від одного сферичних...
Спосіб визначення кутів зеніту і візира
Номер патенту: 63188
Опубліковано: 26.09.2011
Автори: Рижков Ігор Вікторович, Ковшов Геннадій Миколайович, Живцова Людмила Іванівна
МПК: E21B 47/00
Мітки: зеніту, кутів, спосіб, визначення, візира
Формула / Реферат:
Спосіб визначення кутів зеніту і візиру, що включає встановлення в корпус перетворювача трьох ортогональних маятників з датчиками кутових переміщень з орієнтацією осі обертання третього маятника уздовж осі корпусу, вимірювання сигналів з датчиків, селективний відбір цих сигналів з подальшим розрахунком кутів зеніту і візира, який відрізняється тим, що кути зеніту і візира...
Пристрій контролю зенітного кута стовбура свердловини
Номер патенту: 39399
Опубліковано: 15.06.2001
Автор: Істомін Ростислав Сергійович
МПК: E21B 19/00
Мітки: свердловини, пристрій, кута, зенітного, контролю, стовбура
Формула / Реферат:
1. Пристрій контролю зенітного кута стовбура свердловини, який включає дебаланс, який відрізняється тим, що додатково містить втулку і відхилюючий елемент, розташований в нижній частині втулки, верхня частина якої цупко з'єднана з дебалансом, який в апсидальній площині, в межах стовбура свердловини, встановлюється таким чином, що знаходиться тільки в нижній, а відхилювач у верхній його частинах, при чому дебаланс, відхилювач і втулка...
Попередній патент: Напівпровідниковий сенсор вологості
Наступний патент: Датчик візирного кута
Випадковий патент: Сталебетонний елемент