Двокоординатний датчик кутів нахилу
Номер патенту: 35954
Опубліковано: 16.04.2001
Автори: Худяков Борис Сергійович, Мрачковський Олег Дмитрович


Формула / Реферат
1. Двокоординатний датчик кутів нахилу, що містить рухомий електрод, жорстко зв'язаний з контрольованим об'єктом, нерухомий електрод у вигляді грушоподібного маятника і вимірювальну схему, підключену до рухомого електрода, який відрізняється тим, що рухомий електрод виконаний у вигляді порожньої півсфери, в центрі якої підвішено грушоподібний маятник, а сама півсфера поділена на чотири рівних електрично ізольованих один від одного сферичних сектори, кожний з яких підключено до входу одного з чотирьох ідентичних каналів вимірювальної схеми, виходи якої є виходами двокоординатного датчика кутів нахилу контрольованого об'єкта.
2. Двокоординатний датчик кутів нахилу по п. 1, який відрізняється тим, що кожний з чотирьох ідентичних каналів вимірювальної схеми містить вимірник електричної ємності, один з входів якого підключено до відповідного сектора півсфери, другий вхід - до генератора опорної напруги, а вихід – до інвертувального і неінвертувального входів двох суматорних підсилювачів, виходи яких є виходами двокоординатного датчика кутів нахилу.
3. Двокоординатний датчик кутів нахилу по п. 1, який відрізняється тим, що кожний з чотирьох ідентичних каналів вимірювальної схеми складається з послідовно включених фазозапізнілої ланки з підключеними до нього сектором півсфери і генератором опорної напруги, детектора нуля напруги, вхідного ланцюга, RS - тригера, 2-х входового кон’юктора і лічильника, причому другий вхід вхідного ланцюга підключено до детектора нуля опорної напруги, а другий вхід кон’юнктора - до генератора лічильних імпульсів, і при цьому лічильники всіх чотирьох каналів через інтерфейс підключені до вбудованого мікропроцесора.
Текст
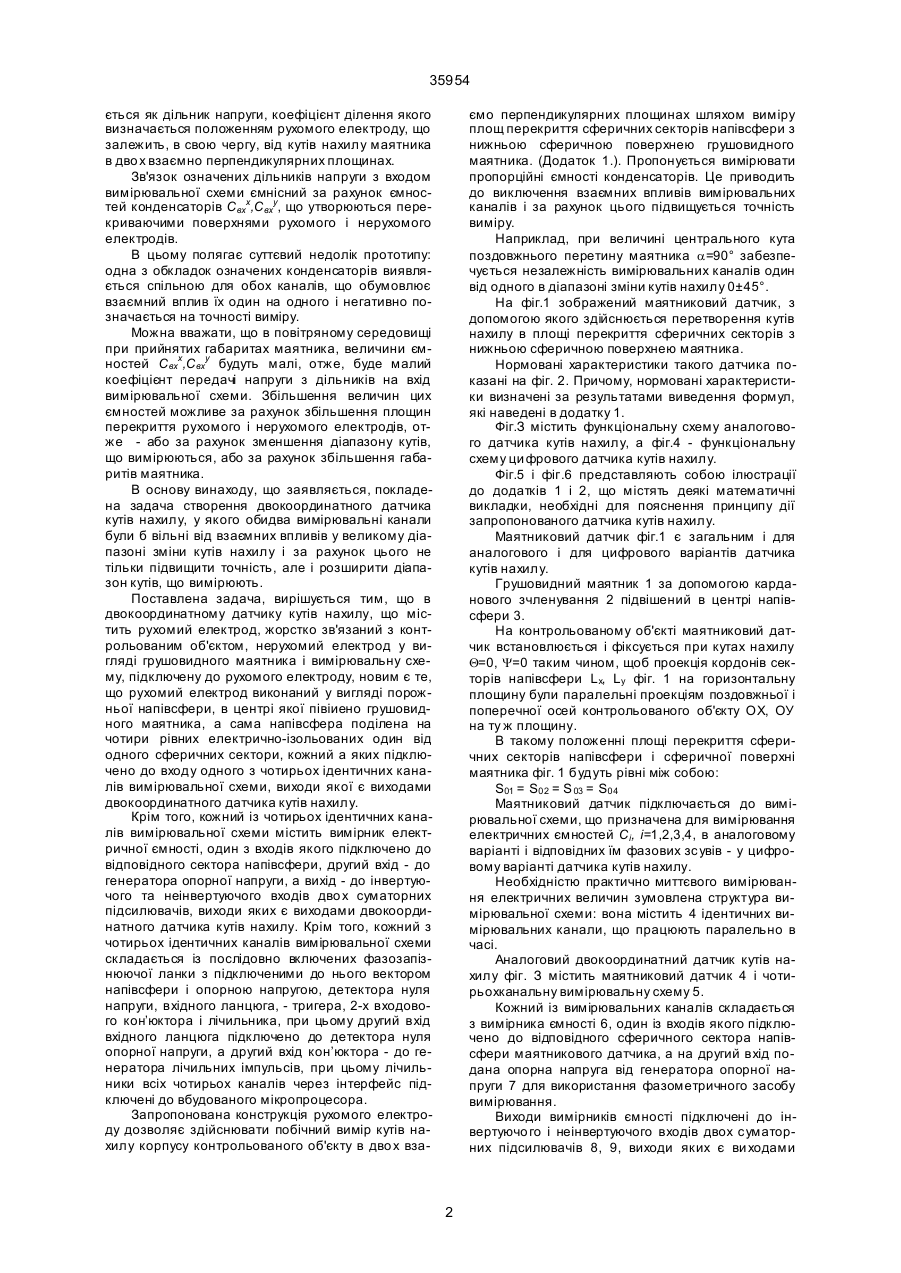
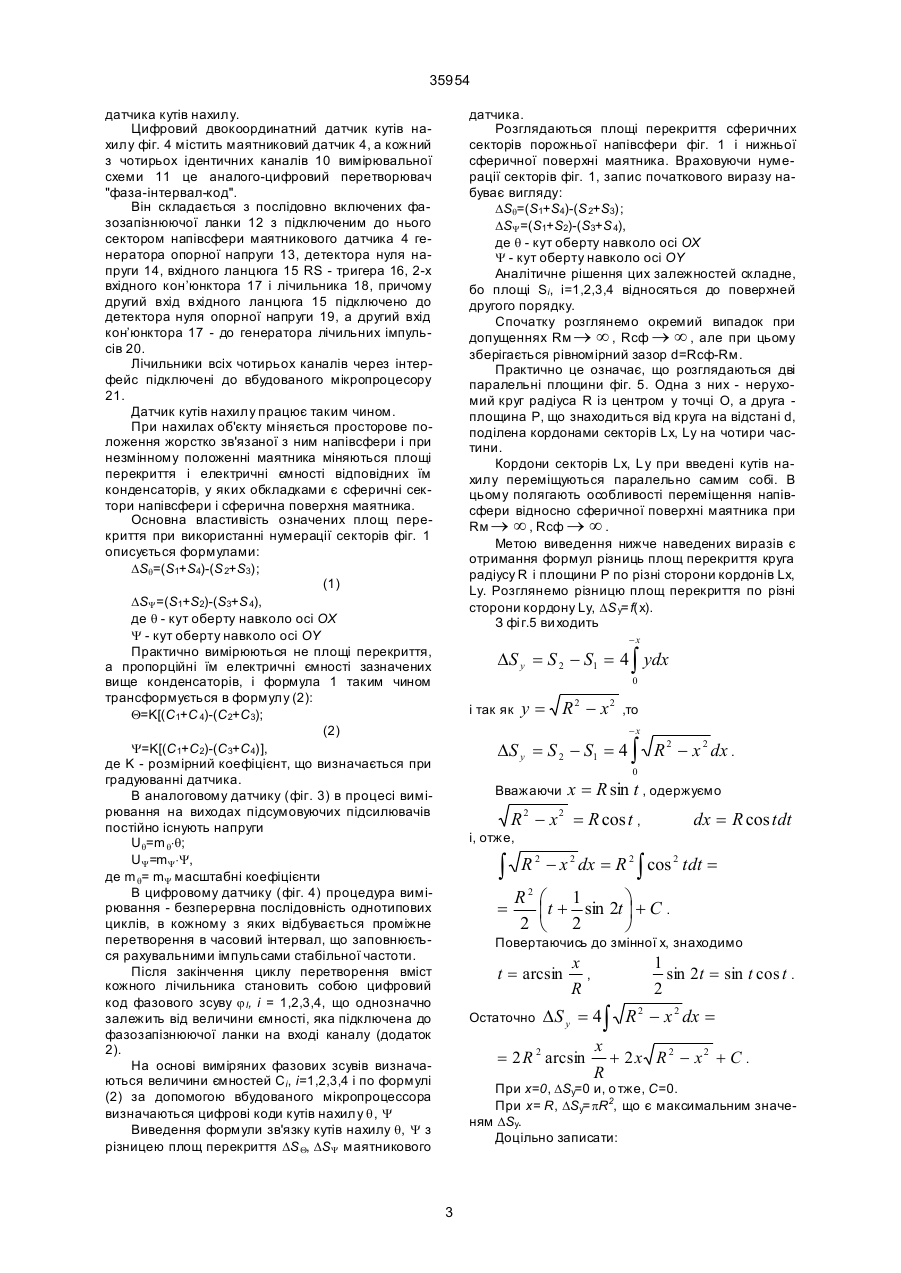
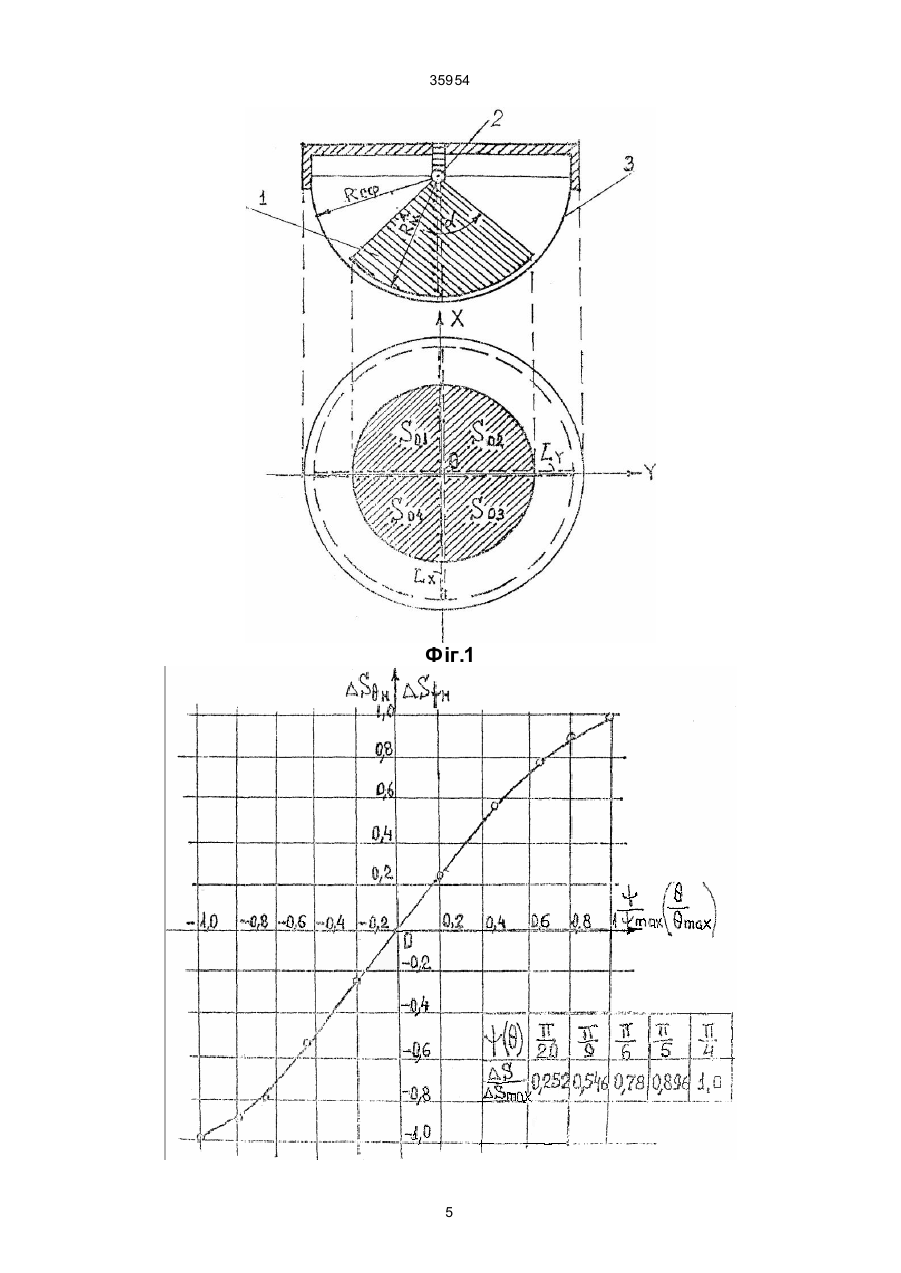
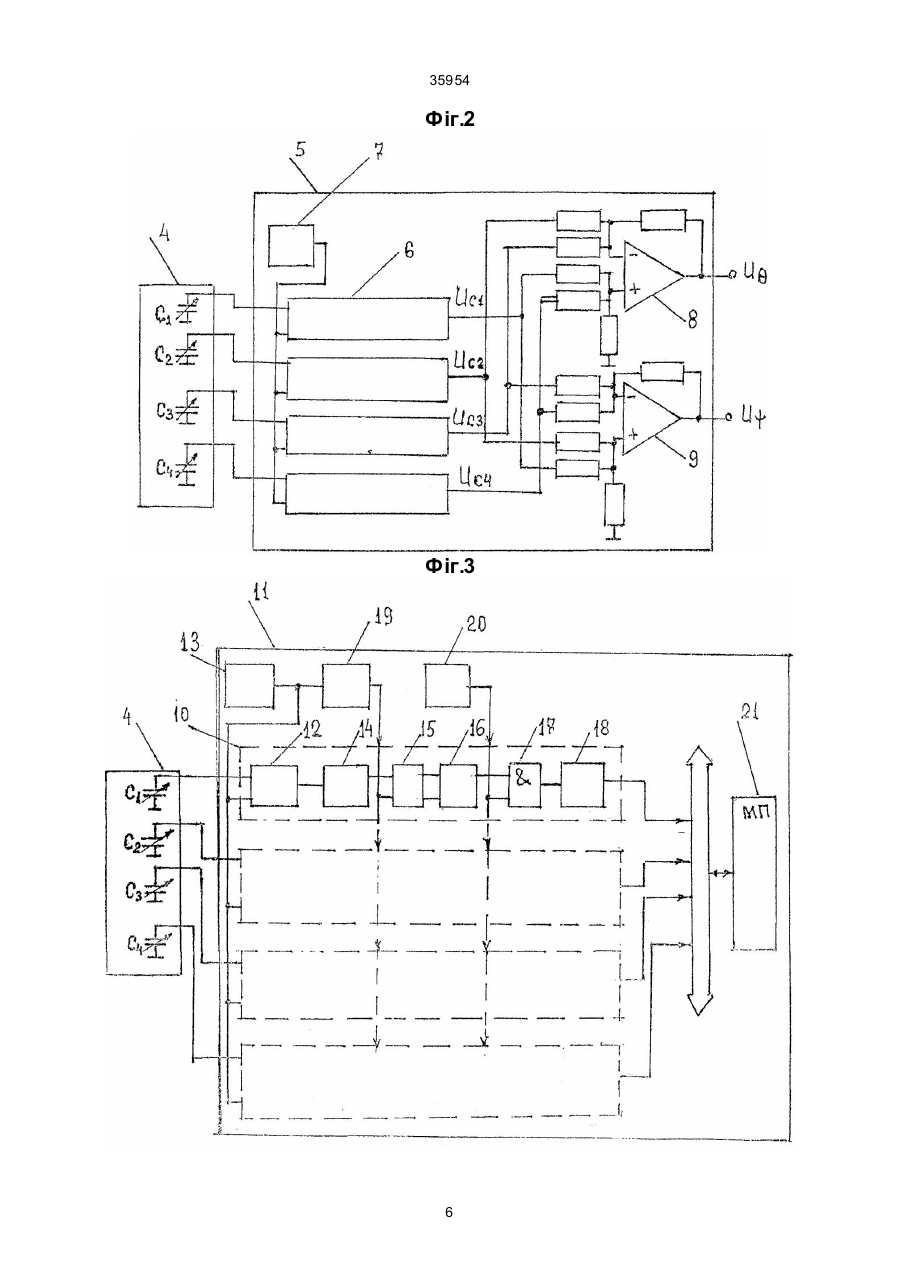
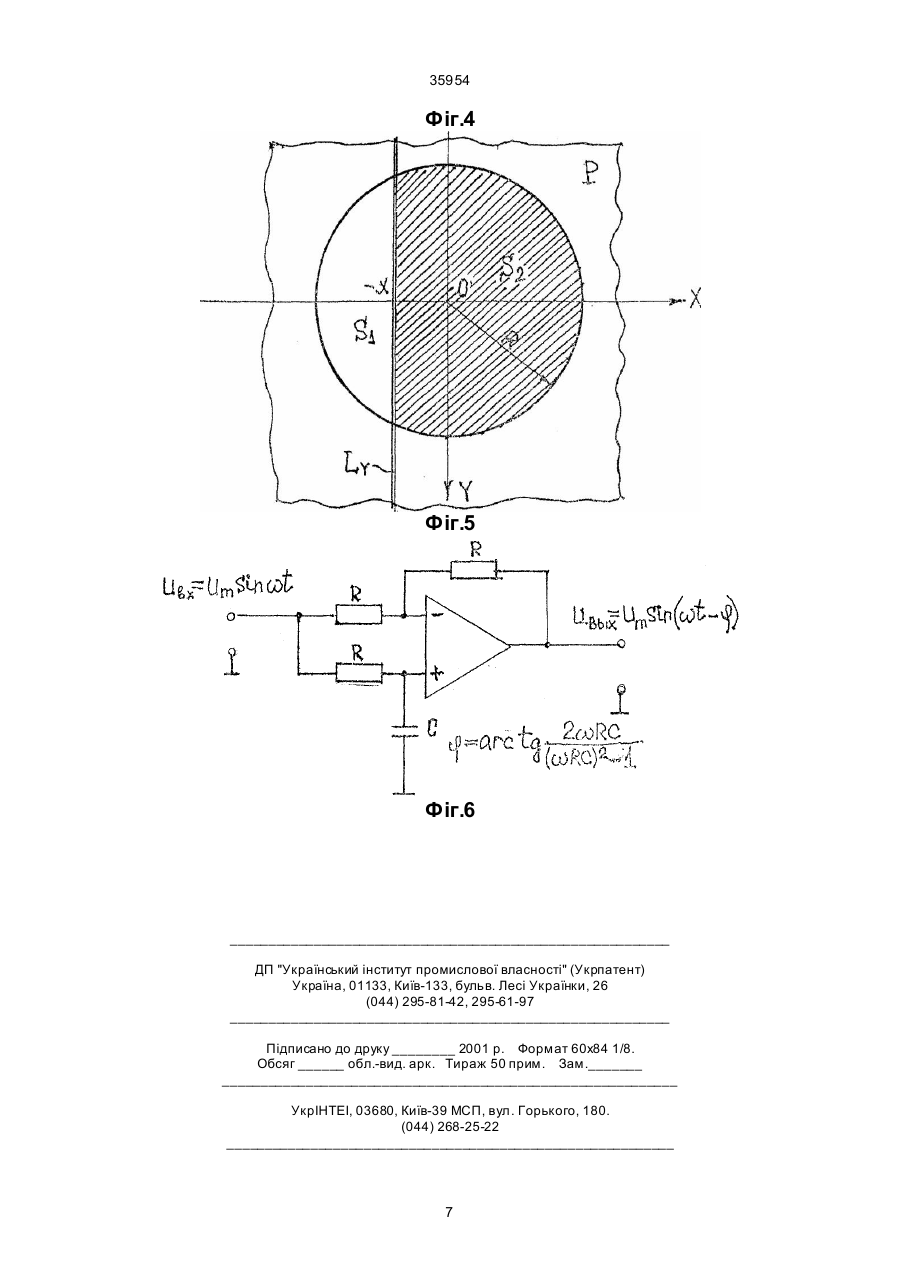
1. Двокоординатний датчик кутів нахилу, що містить рухомий електрод, жорстко зв'язаний з контрольованим об'єктом, нерухомий електрод у вигляді rpyшоподібного маятника і вимірювальну схему, підключену до рухомого електрода, який відрізняє ться тим, що рухомий електрод виконаний у вигляді порожньої.півсфери, в центрі якої підвішено грушоподібний маятник, а сама півсфера поділена на чотири рівних електрично ізольованих один від одного сферичних сектори, кожний з яких підключено до входу одного з чотирьох ідентичних каналів вимірювальної схеми, виходи якої є виходами двокоординатного датчика кутів нахилу контрольованого об'єкт'а. A (54) ДВОКООРДИНАТНИЙ Д АТЧИК КУТІВ НАХИЛУ 35954 ється як дільник напруги, коефіцієнт ділення якого визначається положенням рухомого електроду, що залежить, в свою чергу, від кутів нахилу маятника в дво х взаємно перпендикулярних площинах. Зв'язок означених дільників напруги з входом вимірювальної схеми ємнісний за рахунок ємностей конденсаторів Свхx,Свхy, що утворюються перекриваючими поверхнями рухомого і нерухомого електродів. В цьому полягає суттєвий недолік прототипу: одна з обкладок означених конденсаторів виявляється спільною для обох каналів, що обумовлює взаємний вплив їх один на одного і негативно позначається на точності виміру. Можна вважати, що в повітряному середовищі при прийнятих габаритах маятника, величини ємностей Свхx,Свхy будуть малі, отже, буде малий коефіцієнт передачі напруги з дільників на вхід вимірювальної схеми. Збільшення величин цих ємностей можливе за рахунок збільшення площин перекриття рухомого і нерухомого електродів, отже - або за рахунок зменшення діапазону кутів, що вимірюються, або за рахунок збільшення габаритів маятника. В основу винаходу, що заявляється, покладена задача створення двокоординатного датчика кутів нахилу, у якого обидва вимірювальні канали були б вільні від взаємних впливів у великому діапазоні зміни кутів нахилу і за рахунок цього не тільки підвищити точність, але і розширити діапазон кутів, що вимірюють. Поставлена задача, вирішується тим, що в двокоординатному датчику кутів нахилу, що містить рухомий електрод, жорстко зв'язаний з контрольованим об'єктом, нерухомий електрод у вигляді грушовидного маятника і вимірювальну схему, підключену до рухомого електроду, новим є те, що рухомий електрод виконаний у вигляді порожньої напівсфери, в центрі якої півіиено грушовидного маятника, а сама напівсфера поділена на чотири рівних електрично-ізольованих один від одного сферичних сектори, кожний а яких підключено до входу одного з чотирьох ідентичних каналів вимірювальної схеми, виходи якої є виходами двокоординатного датчика кутів нахилу. Крім того, кожний із чотирьох ідентичних каналів вимірювальної схеми містить вимірник електричної ємності, один з входів якого підключено до відповідного сектора напівсфери, другий вхід - до генератора опорної напруги, а вихід - до інвертуючого та неінвертуючого входів дво х суматорних підсилювачів, виходи яких є виходами двокоординатного датчика кутів нахилу. Крім того, кожний з чотирьох ідентичних каналів вимірювальної схеми складається із послідовно включених фазозапізнюючої ланки з підключеними до нього вектором напівсфери і опорною напругою, детектора нуля напруги, вхідного ланцюга, - тригера, 2-х входового кон’юктора і лічильника, при цьому другий вхід вхідного ланцюга підключено до детектора нуля опорної напруги, а другий вхід кон’юктора - до генератора лічильних імпульсів, при цьому лічильники всіх чотирьох каналів через інтерфейс підключені до вбудованого мікропроцесора. Запропонована конструкція рухомого електроду дозволяє здійснювати побічний вимір кутів нахилу корпусу контрольованого об'єкту в дво х вза ємо перпендикулярних площинах шляхом виміру площ перекриття сферичних секторів напівсфери з нижньою сферичною поверхнею грушовидного маятника. (Додаток 1.). Пропонується вимірювати пропорційні ємності конденсаторів. Це приводить до виключення взаємних впливів вимірювальних каналів і за рахунок цього підвищується точність виміру. Наприклад, при величині центрального кута поздовжнього перетину маятника a=90° забезпечується незалежність вимірювальних каналів один від одного в діапазоні зміни кутів нахилу 0±45°. На фіг.1 зображений маятниковий датчик, з допомогою якого здійснюється перетворення кутів нахилу в площі перекриття сферичних секторів з нижньою сферичною поверхнею маятника. Нормовані характеристики такого датчика показані на фіг. 2. Причому, нормовані характеристики визначені за результатами виведення формул, які наведені в додатку 1. Фіг.З містить функціональну схему аналогового датчика кутів нахилу, а фіг.4 - функціональну схему ци фрового датчика кутів нахилу. Фіг.5 і фіг.6 представляють собою ілюстрації до додатків 1 і 2, що містять деякі математичні викладки, необхідні для пояснення принципу дії запропонованого датчика кутів нахилу. Маятниковий датчик фіг.1 є загальним і для аналогового і для цифрового варіантів датчика кутів нахилу. Грушовидний маятник 1 за допомогою карданового зчленування 2 підвішений в центрі напівсфери 3. На контрольованому об'єкті маятниковий датчик встановлюється і фіксується при кутах нахилу Q=0, Y=0 таким чином, щоб проекція кордонів секторів напівсфери Lx, Ly фіг. 1 на горизонтальну площину були паралельні проекціям поздовжньої і поперечної осей контрольованого об'єкту ОХ, ОУ на ту ж площину. В такому положенні площі перекриття сферичних секторів напівсфери і сферичної поверхні маятника фіг. 1 будуть рівні між собою: S01 = S02 = S 03 = S04 Маятниковий датчик підключається до вимірювальної схеми, що призначена для вимірювання електричних ємностей Ci, i=1,2,3,4, в аналоговому варіанті і відповідних їм фазових зсувів - у цифровому варіанті датчика кутів нахилу. Необхідністю практично миттєвого вимірювання електричних величин зумовлена структура вимірювальної схеми: вона містить 4 ідентичних вимірювальних канали, що працюють паралельно в часі. Аналоговий двокоординатний датчик кутів нахилу фіг. З містить маятниковий датчик 4 і чотирьохканальну вимірювальну схему 5. Кожний із вимірювальних каналів складається з вимірника ємності 6, один із входів якого підключено до відповідного сферичного сектора напівсфери маятникового датчика, а на другий вхід подана опорна напруга від генератора опорної напруги 7 для використання фазометричного засобу вимірювання. Виходи вимірників ємності підключені до інвертуючо го і неінвертуючого входів двох суматорних підсилювачів 8, 9, виходи яких є ви ходами 2 35954 датчика кутів нахилу. Цифровий двокоординатний датчик кутів нахилу фіг. 4 містить маятниковий датчик 4, а кожний з чотирьох ідентичних каналів 10 вимірювальної схеми 11 це аналого-цифровий перетворювач "фаза-інтервал-код". Він складається з послідовно включених фазозапізнюючої ланки 12 з підключеним до нього сектором напівсфери маятникового датчика 4 генератора опорної напруги 13, детектора нуля напруги 14, вхідного ланцюга 15 RS - тригера 16, 2-х вхідного кон’юнктора 17 і лічильника 18, причому другий вхід вхідного ланцюга 15 підключено до детектора нуля опорної напруги 19, а другий вхід кон’юнктора 17 - до генератора лічильних імпульсів 20. Лічильники всіх чотирьох каналів через інтерфейс підключені до вбудованого мікропроцесору 21. Датчик кутів нахилу працює таким чином. При нахилах об'єкту міняється просторове положення жорстко зв'язаної з ним напівсфери і при незмінному положенні маятника міняються площі перекриття і електричні ємності відповідних їм конденсаторів, у яких обкладками є сферичні сектори напівсфери і сферична поверхня маятника. Основна властивість означених площ перекриття при використанні нумерації секторів фіг. 1 описується формулами: DSq=(S1+S4)-(S 2+S3); (1) DSY =(S1+S2)-(S3+S 4), де q - кут оберту навколо осі OX Y - кут оберту навколо осі OY Практично вимірюються не площі перекриття, а пропорційні їм електричні ємності зазначених вище конденсаторів, і формула 1 таким чином трансформується в формулу (2): Q=K[(C1+C 4)-(C2+C3); (2) Y=K[(C1+C2)-(C3+C4)], де K - розмірний коефіцієнт, що визначається при градуюванні датчика. В аналоговому датчику (фіг. 3) в процесі вимірювання на виходах підсумовуючих підсилювачів постійно існують напруги Uq=m q×q; UY =mY ×Y, де m q= mY масштабні коефіцієнти В цифровому датчику (фіг. 4) процедура вимірювання - безперервна послідовність однотипових циклів, в кожному з яких відбувається проміжне перетворення в часовий інтервал, що заповнюється рахувальними імпульсами стабільної частоти. Після закінчення циклу перетворення вміст кожного лічильника становить собою цифровий код фазового зсуву j I, i = 1,2,3,4, що однозначно залежить від величини ємності, яка підключена до фазозапізнюючої ланки на вході каналу (додаток 2). На основі виміряних фазових зсувів визначаються величини ємностей С i, i=1,2,3,4 і по формулі (2) за допомогою вбудованого мікропроцессора визначаються цифрові коди кутів нахилу q, Y Виведення формули зв'язку кутів нахилу q, Y з різницею площ перекриття DS Q, DSY маятникового датчика. Розглядаються площі перекриття сферичних секторів порожньої напівсфери фіг. 1 і нижньої сферичної поверхні маятника. Враховуючи нумерації секторів фіг. 1, запис початкового виразу набуває вигляду: DSq=(S1+S4)-(S 2+S3); DSY =(S1+S2)-(S3+S 4), де q - кут оберту навколо осі OX Y - кут оберту навколо осі OY Аналітичне рішення цих залежностей складне, бо площі Si, і=1,2,3,4 відносяться до поверхней другого порядку. Спочатку розглянемо окремий випадок при допущеннях Rм ® ¥ , Rсф ® ¥ , але при цьому зберігається рівномірний зазор d=Rсф-Rм. Практично це означає, що розглядаються дві паралельні площини фіг. 5. Одна з них - нерухомий круг радіуса R із центром у точці О, а друга площина Р, що знаходиться від круга на відстані d, поділена кордонами секторів Lx, Ly на чотири частини. Кордони секторів Lx, L y при введені кутів нахилу переміщуються паралельно самим собі. В цьому полягають особливості переміщення напівсфери відносно сферичної поверхні маятника при Rм ® ¥ , Rсф ® ¥ . Метою виведення нижче наведених виразів є отримання формул різниць площ перекриття круга радіусу R і площини Р по різні сторони кордонів Lx, Ly. Розглянемо різницю площ перекриття по різні сторони кордону Ly, DS y=f(x). З фі г.5 ви ходить -x DS y = S 2 - S1 = 4 ò ydx 0 y= R -x 2 і так як 2 ,то -x DS y = S 2 - S1 = 4 ò R 2 - x 2 dx . 0 Вважаючи x = R sin t , одержуємо R 2 - x 2 = R cos t , dx = R cos tdt і, отже, ò = R 2 - x 2 dx = R 2 ò cos 2 tdt = R2 æ 1 ö ç t + sin 2t ÷ + C . 2 è 2 ø Повертаючись до змінної х, знаходимо t = arcsin Остаточно x , R 1 sin 2t = sin t cos t . 2 DS y = 4 ò R 2 - x 2 dx = = 2 R 2 arcsin x + 2x R 2 - x2 + C . R При x=0, DSy=0 и, о тже, С=0. При x= R, DSy=pR2, що є максимальним значеням DSy. Доцільно записати: 3 35954 величини кутів q, Y; - кожна з різниць DSq, DSY є функцією однієї змінної і, отже, можна побудувати датчик крену і дифферента з двома незалежними один від одного каналами. Вивід формули для визначення величини підключеної ємності по виміряному фазовому зсуву. Розглядається схема фазозапізнюючої ланки фіг.6, для якої величина фазового зсуву ви хідної напруги описується виразом, наведеним в [1]: 2 x æ xö DS y = 2 R arcsin + 2 xR 1 - ç ÷ . R èRø x Отже, звідси отримуємо обмеження £ 1 , що R 2 означає неприпустимість виходу точки пересічення границь Lx, Ly за межі круга. Нормована характеристика має вигляд: DS yн DS y 2 x 2 x æxö = = arcsin + 1- ç ÷ 2 pR p R p R è Rø 2 j = - arctg y æyö DS x = 2R arcsin + 2 yR 1 - ç ÷ R èRø tgj = 2 . l x = Rм × q ; a p R = Rм = R м . 2 4 . c1, 2 = C= 1 cos j w Rtgw -1+ = 1 - cos j 1 j = tg wR sin j wR 2 Вимірювальна схема містить чотири вимірювальних канали і, отже, після закінчення кожного циклу вимірів будуть отримані чотири цифрові коди фазових зсувів j1 ,j2 ,j3 ,j4 , яким відповідають чотири значення ємностей підключених конденсаторів: DS xн , DS yн нормовані характеристики мають вигляд: j j 1 1 tg 1 ; C3 = tg 3 ; wR 2 wR 2 j j 1 1 C2 = tg 2 ; C4 = tg 4 ; wR 2 wR 2 2 ö 2æ ç arcsin 4 q + 4 q 1 - æ 4 q ö ÷ ç ÷ pç p p èp ø ÷ è ø 2 ö 2æ 4 4 æ4 ö = ç arcsin y + y 1 - ç y ÷ ÷ ç p p p èp ø ÷ è ø C1 = D Sq н = D Sy н - 2wR ± 4w 2 R 2 + 4w 2 R 2 tg 2j 4w 2 R 2tgj знак тільки плюс l y = Rм ×y ; Після підстановки в формули для (wRC ) 2 - 1 По відомому правилу 2 Розповсюдимо отриманий результат на випадок кінцевого значення радіуса Rм. Замінимо лінійні величини x,y в формулах відповідними їм дугами 2wRC (wR )2 tgjC 2 + 2wRC - tgj = 0 . зом DS xн , і квадратне рівняння відносно С: Нормована характеристика описується вира 2 y 2 y æyö = arcsin + 1- ç ÷ p R p R èRø (wRC )2 - 1 де С - ємність підключеного конденсатора; w - кругова частота опорної напруги; R - опір вхідного резистора. Звідси Аналогічно, в випадку переміщення площини P вздовж осі YY (переміщається границя Lx паралельно самій собі): 2 2wRC Визначені таким чином величини C1,C2,C3,C4 підставляються в основну формулу (2) для обчислення цифрових кодів кутів на хилу q,Y. Графіки нормованих характеристик представлені на фіг. 2. З розгляду цих графіків можна зробити наступні висновки: - між різницями парних сум площ перекриття по різні сторони кордонів Lx, Ly і кутами q, Y існує взаємо однозначна відповідність і, отже, можна за результатами виміру величин DSq, DSY визначати 1. Щербаков В.І., Грездов Г.І. Електронні схеми на операційних підсилювачах: Довідник-Київ: Техніка, 1983. 4 35954 Фіг.1 5 35954 Фіг.2 Фіг.3 6 35954 Фіг.4 Фіг.5 Фіг.6 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Назва патенту англійськоюTwo-coordinate indicator of angles of inclination
Автори англійськоюMrachkovskyi Oleh Dmytrovych, Khudiakov Borys Serhiiovych
Назва патенту російськоюДвухкоординатный датчик углов наклона
Автори російськоюМрачковский Олег Дмитриевич, Худяков Борис Сергеевич
МПК / Мітки
МПК: G01C 9/00
Мітки: кутів, нахилу, датчик, двокоординатний
Код посилання
<a href="https://ua.patents.su/7-35954-dvokoordinatnijj-datchik-kutiv-nakhilu.html" target="_blank" rel="follow" title="База патентів України">Двокоординатний датчик кутів нахилу</a>
Датчик магнітного поля
Номер патенту: 33149
Опубліковано: 15.02.2001
Автори: Пелех Любов Миколаївна, Варшава Славомир Степанович, Прохорович Анатолій Вікторович, Венгер Евген Федорович
МПК: H01L 43/06
Мітки: магнітного, поля, датчик
Текст:
...витягнуті HP з 2-а контактами кожен, дозволяв підвищити багатократно чутливість датчика» оскільки практично не Існує обмежень на їх КІЛЬКІСТЬ , те хнологія їх виготовлення в набагато простіша, ніж елементів лолла, оскільки не Існує проблеми холдЕвських контактів, що особливо важливо для мікрокристалів, якими в ниткопо діб ні кристали. Окрім цього, встановлення МР на кільцевому фериті дозволяє сумістити функції підкладки І концентратора...
Тензометричний датчик тиску
Номер патенту: 3059
Опубліковано: 26.12.1994
Автори: Панков Юрій Михайлович, Мар'ямова Інна Йосипівна
МПК: G01L 9/04
Мітки: тиску, датчик, тензометричний
Формула / Реферат:
Тензометрический датчик давления, содержащий корпус, мембрану, связанную посредством штока с жесткозащемленной с двух концов балкой, на одной из сторон которой размещены центральные и периферийные тензорезисторы, соединенные в мостовую измерительную схему, при этом каждый периферийный и центральный тензорезисторы включены в смежные плечи мостовой схемы, отличающийся тем, что тензорезисторы, входящие в смежные плечи мостовой схемы, расположены...
Багатофункціональний датчик
Номер патенту: 28394
Опубліковано: 16.10.2000
Автори: Байцар Роман Іванович, Варшава Славомир Степанович, Венгер Євген Федорович, Прохорович Анатолій Вікторович
МПК: G01K 7/16, G01B 7/00, H01L 43/00
Мітки: багатофункціональний, датчик
Формула / Реферат:
1. Багатофункціональний датчик, що містить чутливий елемент з ниткоподібного напівпровідникового монокристала, точкові контакти, який відрізняється тим, що чутливий елемент виготовлено з голчастого монокристала твердого розчину Si1-хGex складу х=0,05, легованого Zn, з питомим опором 0,5 Ом.см, чутливий елемент складається з 3-х частин, утворених 4-а точковими контактами так, що частина з сторони більшого поперечного перерізу використана як...
Датчик рівня
Номер патенту: 36135
Опубліковано: 16.04.2001
Автори: Панченко Володимир Іванович, Панченко Тарас Володимирович, Панченко Іван Володимирович
МПК: G01F 23/00
Текст:
...роботи датчика рівня. Для повернення датчика у вихідний стан служить механізм вихідного положення 3. Оскільки датчик може знаходитися у важкодоступних місцях, для забезпечення візуального контролю роботи датчика служить пристрій контролю 6, для чого вихід безконтактного датчика 4 сполучений також із блоком контролю 6, що складається з комутатора 7 для перемикання перевірки трактів проходження корисного сигналу по всьому ланцюгу і ланцюгу без...
Датчик вологості
Номер патенту: 32321
Опубліковано: 15.12.2000
Автори: Ревук Олексій Григорович, Яблуновська Наталія Анатоліївна, Дмитриченко Микола Федорович
МПК: G01N 22/00
Текст:
...якої намотаний в один шар, діаметр провода 0.1 мм, діелектричною вставкою З, яка має форму клину і разташована між широкими сторонами котушок 2. На фіг.2 показаний поперечний переріз датчика (вид спереду), що складається з двох феритових стержнів які мають трикутну форму, площа їх змінюється, на них розташовується дротяна обмотка. На фіг. З представлений вигляд датчика збоку. На фіг.4, 5, 6 показана діелектрична вставка, відповідно, вигляд...
Попередній патент: Пристрій для діагностики внутрішніх органів живих істот
Наступний патент: Спосіб виготовлення безметалевої незнімної зубної коронки
Випадковий патент: Спосіб гемостазу та відновлення міхурово-уретрального сегмента при залобковій простатектомії