Система підготовки даних до стрільби з використанням літаючої платформи як спостережного пункту
Номер патенту: 71468
Опубліковано: 10.07.2012
Автори: Корольов Володимир Миколайович, Яковенко Вадим Віталійович, Бєляков Володимир Федорович, Мількович Ігор Богданович, Корольова Ольга Володимирівна

Формула / Реферат
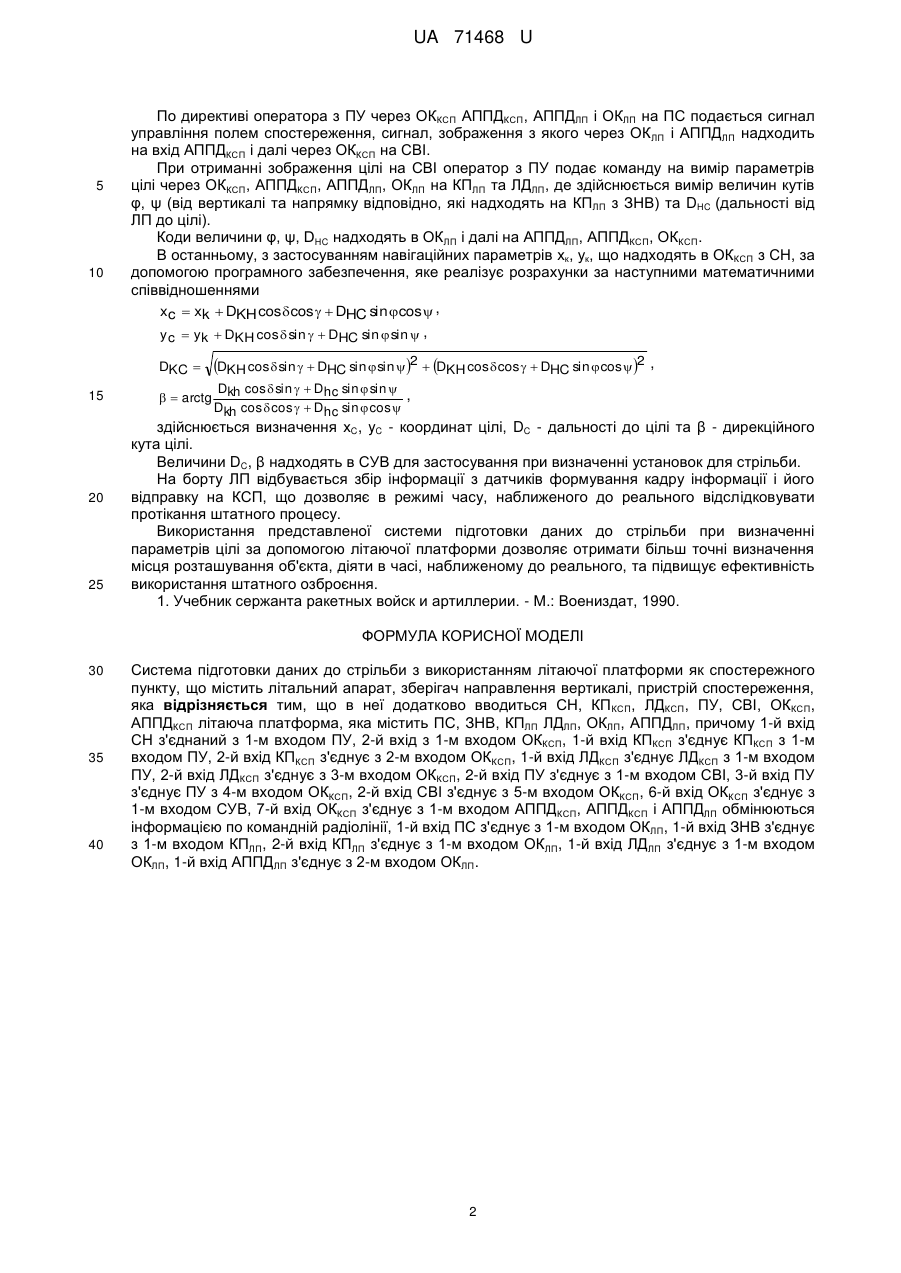
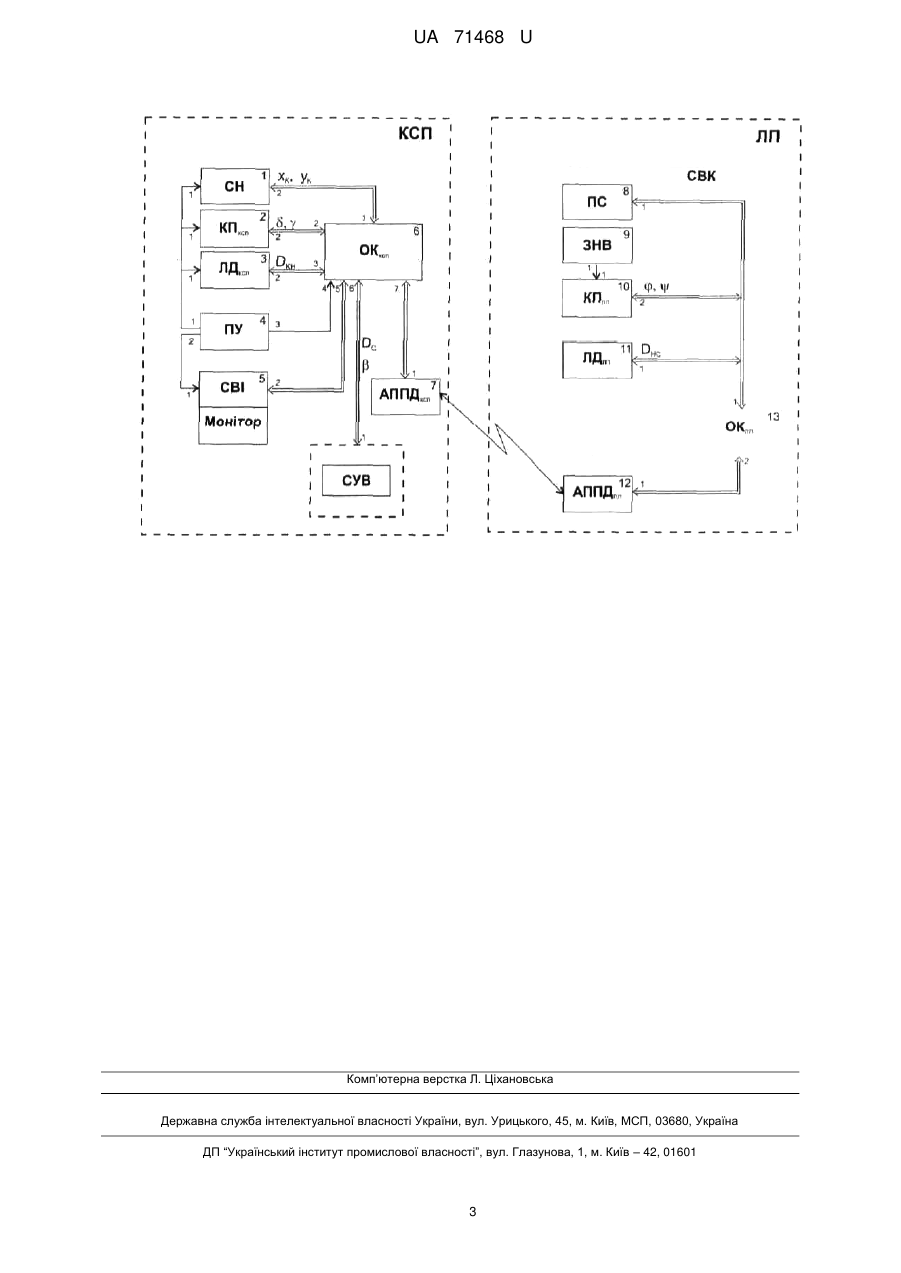
Система підготовки даних до стрільби з використанням літаючої платформи як спостережного пункту, що містить літальний апарат, зберігач направлення вертикалі, пристрій спостереження, яка відрізняється тим, що в неї додатково вводиться СН, КПКСП, ЛДКСП, ПУ, СВІ, ОККСП, АППДКСП літаюча платформа, яка містить ПС, ЗНВ, КПЛП ЛДЛП, ОКЛП, АППДЛП, причому 1-й вхід СН з'єднаний з 1-м входом ПУ, 2-й вхід з 1-м входом ОККСП, 1-й вхід КПКСП з'єднує КПКСП з 1-м входом ПУ, 2-й вхід КПКСП з'єднує з 2-м входом ОККСП, 1-й вхід ЛДКСП з'єднує ЛДКСП з 1-м входом ПУ, 2-й вхід ЛДКСП з'єднує з 3-м входом ОККСП, 2-й вхід ПУ з'єднує з 1-м входом СВІ, 3-й вхід ПУ з'єднує ПУ з 4-м входом ОККСП, 2-й вхід СВІ з'єднує з 5-м входом ОККСП, 6-й вхід ОККСП з'єднує з 1-м входом СУВ, 7-й вхід ОККСП з'єднує з 1-м входом АППДКСП, АППДКСП і АППДЛП обмінюються інформацією по командній радіолінії, 1-й вхід ПС з'єднує з 1-м входом ОКЛП, 1-й вхід ЗНВ з'єднує з 1-м входом КПЛП, 2-й вхід КПЛП з'єднує з 1-м входом ОКЛП, 1-й вхід ЛДЛП з'єднує з 1-м входом ОКЛП, 1-й вхід АППДЛП з'єднує з 2-м входом ОКЛП.
Текст
Реферат: Система підготовки даних до стрільби з використанням літаючої платформи як спостережного пункту містить літальний апарат, зберігач направлення вертикалі, пристрій спостереження. Додатково вводиться СН, КПКСП, ЛДКСП, ПУ, СВІ, ОККСП, АППДКСП літаюча платформа, яка містить ПС, ЗНВ, КПЛП ЛДЛП, ОКЛП, АППДЛП. UA 71468 U (54) СИСТЕМА ПІДГОТОВКИ ДАНИХ ДО СТРІЛЬБИ З ВИКОРИСТАННЯМ ЛІТАЮЧОЇ ПЛАТФОРМИ ЯК СПОСТЕРЕЖНОГО ПУНКТУ UA 71468 U UA 71468 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі артилерійського озброєння, зокрема до засобів дистанційного визначення місцеположення наземного об'єкта з використанням літаючої платформи (ЛП). Корисна модель може бути застосована для визначення параметрів цілі та визначення установок для здійснення вогневого ураження. Система підготовки даних до стрільби з використанням літаючої платформи як спостережного пункту, яка містить на командно-спостережному пункті (КСП) навігаційний та обчислювальний комплекси (СН, ОККСП) кутомірний прилад (КПКСП), лазерний далекомір (ЛДКСП), систему відображення інформації (СВІ, Монітор), апаратуру прийому/передачі даних (АППД КСП), пульт управління (ПУ), система управління вогнем (СУВ); літаючу платформу, яка містить обчислювальний комплекс (ОКЛП), апаратуру прийому/передачі даних (АППДЛП) та спостережновимірювальний комплекс (СВК), до складу якого входять пристрій спостереження (ПС), зберігач направлення вертикалі (ЗНВ), кутомірний прилад (КПЛП), лазерний далекомір (ЛДЛП). Відома система "Способ дистанционного определения координат местоположения наземного объекта" RU G01S013/06, яка містить систему огляду, що встановлена на дистанційно-пілотованому літальному апараті, з можливістю повороту у вертикальній площині та стабілізованій по крену, магнітний компас, зберігач направлення вертикалі, висотомір. Отримується сигнал зображення ділянки місцевості, що знаходиться в полі зору системи огляду. Недоліками даної системи є: - визначаються лише географічні координати наземного об'єкта; - необхідна велика кількість додаткової інформації; - низька точність визначення координат наземного об'єкта. Відомий метод "Визначення установок для стрільби по даних створення (пристрілки) реперів", для застосування якого необхідно кутомірний прилад та далекомірний прилад (ДС1/ДС-2) або радіолокаційна станція (типу АРСОМ/СНАР), засіб зв'язку [1]. Недоліками даної системи є: - затрачується додатковий час на створення репера; - необхідно умови достатньої видимості встановленого репера; - низька точність визначення координат наземного об'єкта. - необхідна велика кількість додаткових обчислень, що уповільнює та ускладнює процес отримання інформації. В основу корисної моделі поставлено задачу вдосконалити процес отримання інформації про розташування наземного об'єкта, який розташовано за лінією горизонту, за допомогою використання літаючої платформи, в яку введено нові конструктивні елементи та зв'язки, які будуть забезпечувати необхідну точність при визначенні параметрів цілі, що надасть необхідний рівень оперативності під час виявлення цілі літаючою платформою. Поставлена задача вирішується наступним шляхом (див. кресл.). В систему "Способ дистанционного определения координат местоположения наземного объекта" вводяться наступні зміни СН, КПКСП, ЛДКСП ПУ, СВІ, ОККСП, АППДКСП, літаюча платформа, яка містить ПС, ЗНВ, КПЛП, ЛДЛП ОКЛП, АППДЛП, причому 1-й вхід СН з'єднаний з 1-м входом ПУ, 2-й вхід з 1-м входом ОККСП, 1-й вхід КПКСП з'єднує КПКСП з 1-м входом ПУ, 2-й вхід КПКСП з'єднує з 2-м входом ОККСП, 1-й вхід ЛДКСП з'єднує ЛДКСП з 1-м входом ПУ, 2-й вхід ЛДКСП з'єднує з 3-м входом ОККСП, 2-й вхід ПУ з'єднує з 1-м входом СВІ, 3-й вхід ПУ з'єднує ПУ з 4-м входом ОККСП 2-й вхід СВІ з'єднує з 5-м входом ОККСП 6-й вхід ОККСП з'єднує з 1-м входом СУ В, 7-й вхід ОККСП з'єднує з 1-м входом АППДКСП, АППДКСП і АППДЛП обмінюються інформацією по командній радіолінії, 1-й вхід ПС з'єднує з 1-м входом ОКЛП, 1-й вхід ЗНВ з'єднує з 1-м входом КПЛП, 2-й вхід КПЛП з'єднує з 1м входом ОКЛП 1-й вхід ЛДЛП з'єднує з 1-м входом ОКЛП, 1-й вхід АППДЛП з'єднує з 2-м входом ОКЛП, що дає змогу: 1. Визначити координати цілі, яка розташована за лінією горизонту. 2. Визначити дирекційний кут цілі. 3. Визначити дальність від командно-спостережного пункту до цілі. 4. Зменшити похибки при визначенні координат цілі, відстані до неї, дирекційного кута повздовжньої осі, за рахунок навігаційного комплексу, який розташовано на літаючій платформі і підвищити оперативність і ефективність виконання поставленого завдання. 5. Не встановлювати додаткові обчислювальні пристрої на літаючій платформі, що спрощує його конструкцію та зменшує кошторис. 6. Не затрачувати час на обробку інформації безпосередньо на літаючій платформі, що наближує процес отримання інформації до реального. Принцип роботи запропонованої корисної моделі пояснений на кресленні. Система підготовки даних до стрільби працює таким чином. 1 UA 71468 U 5 10 По директиві оператора з ПУ через ОККСП АППДКСП, АППДЛП і ОКЛП на ПС подається сигнал управління полем спостереження, сигнал, зображення з якого через ОК ЛП і АППДЛП надходить на вхід АППДКСП і далі через ОККСП на СВІ. При отриманні зображення цілі на СВІ оператор з ПУ подає команду на вимір параметрів цілі через ОККСП, АППДКСП, АППДЛП, ОКЛП на КПЛП та ЛДЛП, де здійснюється вимір величин кутів φ, ψ (від вертикалі та напрямку відповідно, які надходять на КПЛП з ЗНВ) та DHC (дальності від ЛП до цілі). Коди величини φ, ψ, DHC надходять в ОКЛП і далі на АППДЛП, АППДКСП, ОККСП. В останньому, з застосуванням навігаційних параметрів хк, ук, що надходять в ОККСП з СН, за допомогою програмного забезпечення, яке реалізує розрахунки за наступними математичними співвідношеннями xc xk DKH cos cos DHC sin cos , yc yk DKH cos sin DHC sin sin , DKC 15 20 25 DKH cos sin DHC sin sin 2 DKH cos cos DHC sin cos 2 , arctg Dkh cos sin Dhc sin sin , Dkh cos cos Dhc sin cos здійснюється визначення хC, yC - координат цілі, DC - дальності до цілі та β - дирекційного кута цілі. Величини DC, β надходять в СУВ для застосування при визначенні установок для стрільби. На борту ЛП відбувається збір інформації з датчиків формування кадру інформації і його відправку на КСП, що дозволяє в режимі часу, наближеного до реального відслідковувати протікання штатного процесу. Використання представленої системи підготовки даних до стрільби при визначенні параметрів цілі за допомогою літаючої платформи дозволяє отримати більш точні визначення місця розташування об'єкта, діяти в часі, наближеному до реального, та підвищує ефективність використання штатного озброєння. 1. Учебник сержанта ракетных войск и артиллерии. - М.: Воениздат, 1990. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Система підготовки даних до стрільби з використанням літаючої платформи як спостережного пункту, що містить літальний апарат, зберігач направлення вертикалі, пристрій спостереження, яка відрізняється тим, що в неї додатково вводиться СН, КП КСП, ЛДКСП, ПУ, СВІ, ОККСП, АППДКСП літаюча платформа, яка містить ПС, ЗНВ, КПЛП ЛДЛП, ОКЛП, АППДЛП, причому 1-й вхід СН з'єднаний з 1-м входом ПУ, 2-й вхід з 1-м входом ОККСП, 1-й вхід КПКСП з'єднує КПКСП з 1-м входом ПУ, 2-й вхід КПКСП з'єднує з 2-м входом ОККСП, 1-й вхід ЛДКСП з'єднує ЛДКСП з 1-м входом ПУ, 2-й вхід ЛДКСП з'єднує з 3-м входом ОККСП, 2-й вхід ПУ з'єднує з 1-м входом СВІ, 3-й вхід ПУ з'єднує ПУ з 4-м входом ОККСП, 2-й вхід СВІ з'єднує з 5-м входом ОККСП, 6-й вхід ОККСП з'єднує з 1-м входом СУВ, 7-й вхід ОККСП з'єднує з 1-м входом АППДКСП, АППДКСП і АППДЛП обмінюються інформацією по командній радіолінії, 1-й вхід ПС з'єднує з 1-м входом ОКЛП, 1-й вхід ЗНВ з'єднує з 1-м входом КПЛП, 2-й вхід КПЛП з'єднує з 1-м входом ОКЛП, 1-й вхід ЛДЛП з'єднує з 1-м входом ОКЛП, 1-й вхід АППДЛП з'єднує з 2-м входом ОКЛП. 2 UA 71468 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for preparation of data for shooting with use of flying platform as an observation post
Автори англійськоюKoroliova Olha Volodymyrivna, Yakovenko Vadym Vitaliiovych, Koroliov Volodymyr Mykolaiovych, Bieliakov Volodymyr Fedorovych, Milkovych Ihor Bohdanovych
Назва патенту російськоюСистема подготовки данных к стрельбе с использованием летающей платформы в качестве наблюдательного пункта
Автори російськоюКоролева Ольга Владимировна, Яковенко Вадим Витальевич, Королев Владимир Николаевич, Беляков Владимир Федорович, Милькович Игорь Богданович
МПК / Мітки
МПК: F41G 3/16
Мітки: пункту, платформи, даних, спостережного, система, літаючої, підготовки, використанням, стрільби
Код посилання
<a href="https://ua.patents.su/5-71468-sistema-pidgotovki-danikh-do-strilbi-z-vikoristannyam-litayucho-platformi-yak-sposterezhnogo-punktu.html" target="_blank" rel="follow" title="База патентів України">Система підготовки даних до стрільби з використанням літаючої платформи як спостережного пункту</a>
Спосіб і пристрій для реалізації сеансу зв`язку з використанням протоколу передачі від пункту до пункту між мобільною станцією і мережею обслуговування пакетних даних
Номер патенту: 72782
Опубліковано: 15.04.2005
Автори: Гс'ю Реймонд Таг-Шен, Резайіфар Рамін
МПК: H04Q 7/00
Мітки: станцією, пристрій, сеансу, даних, зв'язку, передачі, протоколу, мережею, мобільною, реалізації, пункту, використанням, спосіб, пакетних, обслуговування
Формула / Реферат:
1. Спосіб інформування вузла обслуговування пакетних даних про пасивні зв'язки мережі, пов'язані з мобільною станцією, коли ця мобільна станція переходить від елемента інфраструктури мережі обслуговування пакетних даних до вузла обслуговування пакетних даних,який включає операції:передачі від мобільної станції повідомлення, яке включає кількість пасивних зв'язків мережі, пов'язаних з мобільною станцією, і список ідентифікаторів...
Пристрій підготовки даних апаратури стрільби і управління вогнем реактивних систем залпового вогню
Номер патенту: 61919
Опубліковано: 10.08.2011
Автори: Корольов Володимир Миколайович, Беляков Володимир Федорович, Полоз Олександр Антонович, Руденко Кирило Вікторович, Корольова Ольга Володимирівна
МПК: F41C 3/00
Мітки: даних, підготовки, управління, вогню, пристрій, залпового, стрільби, апаратури, систем, реактивних, вогнем
Формула / Реферат:
Пристрій підготовки даних апаратури стрільби і управління вогнем реактивних систем залпового вогню, який містить оптичні та механічні прилади прицілювання для повороту пакета напрямних в вертикальній та горизонтальній площині, яка відрізняється тим, що додатково містить апаратуру стрільби та управління вогнем і, як її складові - навігаційний та обчислювальний комплекси, систему відображення інформації, навігаційний комплекс, пульт...
Спосіб передачі даних, система з використанням такої передачі, передавач і приймач для передачі/прийому цифрових даних
Номер патенту: 72441
Опубліковано: 15.03.2005
Автори: Томсік Джеймз Д., Резайіфар Рамін, Бендер Пол І., Тідеманн Едвард Г., мол.
МПК: H04L 1/16
Мітки: цифрових, спосіб, передавач, приймач, використанням, такої, система, передачі, даних
Формула / Реферат:
1. Спосіб передачі даних від передавача до приймача з використанням кадру, який має порядковий номер і прапор повторної передачі, який включає:а) передачу кадру у перший раз із зазначеним прапором повторної передачі, установленим у значення "хибність", і порядкового номера, установленого в частину довгого порядкового номера,б) збільшення зазначеного довгого порядкового номера ів) повторну передачу кадру у...
Спосіб та система для здійснення різних процесів ідентифікації з використанням одного й того ж носія даних
Номер патенту: 42756
Опубліковано: 15.11.2001
Автор: Хекстра Андріс Пітер
МПК: G07F 7/08, G07F 7/10, G07F 7/12
Мітки: одного, система, носія, використанням, спосіб, того, різних, процесів, даних, ідентифікації, здійснення
Формула / Реферат:
1. Способ для осуществления различных процессов идентификации с использованием одного и того же носителя данных, на котором хранится по меньшей мере один код, причем при осуществлении первого процесса опознавания указанный способ включает стадии:- прием первого кода, хранимого на носителе информации, и второго кода, исходящего от пользователя,- осуществление по меньшей мере одного из следующих преобразований:- первого...
Спосіб визначення поправок для підготовки стрільби артилерії
Номер патенту: 34134
Опубліковано: 25.07.2008
Автор: Колобилін Сергій Миколайович
МПК: F41G 3/08
Мітки: визначення, підготовки, артилерії, стрільби, спосіб, поправок
Формула / Реферат:
Спосіб визначення поправок для підготовки стрільби артилерії шляхом ведення пристрілки з наступним визначенням точки розриву снаряда відносно цілі і обчисленням поправки на напрямок і дальність, який відрізняється тим, що пристрілку здійснюють снарядом, в якому замість вибухової речовини встановлюють GPS трекер, при цьому балістичні характеристики такого снаряда підтримують на рівні бойового снаряда, а для визначення точки розриву снаряда...
Попередній патент: Пристрій локалізації і гасіння полум’я
Наступний патент: Спосіб прогнозування рецидиву виразкових кровотеч пілородуоденальної зони
Випадковий патент: Спосіб замовлення квитків