Спосіб (варіанти) і пристрій (варіанти) для генерування повідомлення про вимірювання сили пілот-сигналу
Номер патенту: 72787
Опубліковано: 15.04.2005
Автори: Ейчаур Баазіз, Ван Джун, Чен Тао, Резайіфар Рамін, Джоу Ю-Чеун
Формула / Реферат
1. Спосіб генерування автономного повідомлення про вимірювання сили пілот-сигналу (ПВСП) мобільною станцією у багатоносійній безпровідній системі зв'язку, який включає операції:
- прийому мобільною станцією сукупності пілот-сигналів, переданих щонайменше однією базовою станцією,
- використання першого визначення сили пілот-сигналу через співвідношення
PS2 = 10 х log{[Pilot Ес/Іо)1/![]() 1 + (Pilot Ес/Іо)2/
1 + (Pilot Ес/Іо)2/![]() 2 + ... + (Pilot Ес/Iо)і/
2 + ... + (Pilot Ес/Iо)і/![]() і,]/і},
і,]/і},
де (Pilot Ec/Іo)i - пілотне відношення Ес/Іо, виміряне на і-ій частоті-носії, ![]() і -відношення потужності передачі і-го пілот-сигналу до потужності передачі первинного пілот-сигналу,
і -відношення потужності передачі і-го пілот-сигналу до потужності передачі первинного пілот-сигналу,
- перевірки набору правил для генерування ПВСП маніпулюванням першим визначенням сили пілот-сигналу і
- генерування ПВСП для передачі мобільною станцією.
2. Спосіб генерування автономного повідомлення про вимірювання сили пілот-сигналу (ПВСП) мобільною станцією у багатоносійній безпровідній системі зв'язку, який включає операції:
- прийому мобільною станцією сукупності пілот-сигналів, переданих щонайменше однією базовою станцією,
- використання першого визначення сили пілот-сигналу через співвідношення
PS3 = 10 х log{max[(Pilot Ec/Іo)1, (Pilot Ec/Іo)2, ..., (Pilot Ec/Іo)і]},
де (Pilot Ec/Іo)i - пілотне відношення Ec/lo, виміряне на і-ій частоті-носії.
- перевірки набору правил для генерування ПВСП маніпулюванням першим визначенням сили пілот-сигналу і
- генерування ПВСП для передачі мобільною станцією.
3. Спосіб генерування автономного повідомлення про вимірювання сили пілот-сигналу (ПВСП) мобільною станцією у багатоносійній безпровідній системі зв'язку, який включає операції:
- прийому мобільною станцією сукупності пілот-сигналів, переданих щонайменше однією базовою станцією,
- використання першого визначення сили пілот-сигналу через співвідношення
PS4 = 10 х log{max[(Pilot Ec/Іo)1/![]() 1, (Pilot Ec/Іо)2/
1, (Pilot Ec/Іо)2/![]() 2, ..., (Pilot Ec/Іo)і/
2, ..., (Pilot Ec/Іo)і/![]() i]},
i]},
де (Pilot Ec/Іo)i - пілотне відношення Ec/Іo, виміряне на і-ій частоті-носії, ![]() і - відношення потужності передачі і-го пілот-сигналу до потужності передачі первинного пілот-сигналу,
і - відношення потужності передачі і-го пілот-сигналу до потужності передачі первинного пілот-сигналу,
- перевірки набору правил для генерування ПВСП маніпулюванням першим
визначенням сили пілот-сигналу і
- генерування ПВСП для передачі мобільною станцією.
4. Спосіб генерування автономного повідомлення про вимірювання сили пілот-сигналу (ПВСП) мобільною станцією у багатоносійній безпровідній системі зв'язку, який включає операції:
- прийому мобільною станцією сукупності пілот-сигналів, переданих щонайменше однією базовою станцією,
- використання сукупності визначень сили пілот-сигналу, яка включає сукупність (PS51, PS52, ..., PS5i), де кожне PS5i визначено як
PS5і = 10 х log[(Pilot Ec/lo)i] для і-ої частоти-носія,
- перевірки набору правил для генерування ПВСП маніпулюванням набором визначень сили пілот-сигналу і
- генерування ПВСП для передачі мобільною станцією.
5. Спосіб за п. 4, який відрізняється тим, що операція перевірки набору правил включає операції:
- визначення чи має кожний член сукупності пілот-сигналів силу, що перевищує зумовлений поріг,
- визначення чи перевищує сила кожного з пілот-сигналів Кандидатської групи силу всіх пілот-сигналів активної групи, через порівняння з заздалегідь визначеним пороговим значенням, і
- визначення чи відпрацював таймер припинення передачі зв'язку для Активної групи.
6. Спосіб за п. 4, який відрізняється тим, що операція перевірки набору правил включає операції:
- визначення чи має кожний член сукупності пілот-сигналів силу, що перевищує зумовлений поріг,
- визначення чи перевищує сила кожного з пілот-сигналів Кандидатської групи силу будь-якого з пілот-сигналів Активної групи, через порівняння з заздалегідь визначеним пороговим значенням,і
- визначення чи відпрацював таймер припинення передачі зв'язку для Активної групи.
7. Пристрій для генерування автономного повідомлення про вимірювання сили пілот-сигналу (ПВСП) мобільною станцією у багатоносійній безпровідній системі зв'язку, який включає:
- засіб прийому мобільною станцією сукупності пілот-сигналів, переданих щонайменше однією базовою станцією,
- засіб використання першого визначення сили пілот-сигналу через співвідношення
PS2 = 10 х log{[Pilot Ес/Іо)1/![]() 1 + (Pilot Ec/Іo)2/
1 + (Pilot Ec/Іo)2/![]() 2 + ... + (Pilot Ес/Іо)і/
2 + ... + (Pilot Ес/Іо)і/![]() і]/і},
і]/і},
де (Pilot Ec/Іo)i - пілотне відношення Ес/Іо, виміряне на і-ій частоті-носії, ![]() і - відношення потужності передачі і-го пілот-сигналу до потужності передачі первинного пілот-сигналу,
і - відношення потужності передачі і-го пілот-сигналу до потужності передачі первинного пілот-сигналу,
- засіб перевірки набору правил для генерування ПВСП маніпулюванням першим визначенням сили пілот-сигналу і
- засіб генерування ПВСП для передачі мобільною станцією.
8. Пристрій для генерування автономного повідомлення про вимірювання сили пілот-сигналу (ПВСП) мобільною станцією у багатоносійній безпровідній системі зв'язку, який включає:
- засіб прийому мобільною станцією сукупності пілот-сигналів, переданих щонайменше однією базовою станцією,
- засіб використання першого визначення сили пілот-сигналу через співвідношення
PS3 = 10 х log{max[(Pilot Ec/Іo)1, (Pilot Ec/Іo)2, ..., (Pilot Ec/Іo)і]},
де (Pilot Ec/Іo)i - пілотне відношення Ec/Іo, виміряне на і-ій частоті-носії,
- засіб перевірки набору правил для генерування ПВСП маніпулюванням першим визначенням сили пілот-сигналу і
- засіб генерування ПВСП для передачі мобільною станцією.
9. Пристрій для генерування автономного повідомлення про вимірювання сили пілот-сигналу (ПВСП) мобільною станцією у багатоносійній безпровідній системі зв'язку, який включає:
- засіб прийому мобільною станцією сукупності пілот-сигналів, переданих щонайменше однією базовою станцією,
- засіб використання першого визначення сили пілот-сигналу через співвідношення
PS4 = 10 х log{max[(Pilot Ec/Іo)1/![]() 1, (Pilot Ec/Іo)2/
1, (Pilot Ec/Іo)2/![]() 2, .... (Pilot Ec/Іo)i/
2, .... (Pilot Ec/Іo)i/![]() і]},
і]},
де (Pilot Ec/Іo)i - пілотне відношення Ec/lo, виміряне на і-ій частоті-носії, ![]() і - відношення потужності передачі і-го пілот-сигналу до потужності передачі первинного пілот-сигналу,
і - відношення потужності передачі і-го пілот-сигналу до потужності передачі первинного пілот-сигналу,
- засіб перевірки набору правил для генерування ПВСП маніпулюванням першим визначенням сили пілот-сигналу і
- засіб генерування ПВСП для передачі мобільною станцією.
10. Пристрій для генерування автономного повідомлення про вимірювання сили пілот-сигналу (ПВСП) мобільною станцією у багатоносійній безпровідній системі зв'язку, який включає:
- засіб прийому мобільною станцією сукупності пілот-сигналів, переданих щонайменше однією базовою станцією,
- засіб використання сукупності визначень сили пілот-сигналу, яка включає сукупність (PS51, PS52, ..., PS5i), де кожне PS5i визначено як
PS5i = 10 х log[(Pilot Ec/Іo)i] для і-ої частоти-носія,
- засіб перевірки набору правил для генерування ПВСП маніпулюванням набором визначень сили пілот-сигналу і
- засіб генерування ПВСП для передачі мобільною станцією.
Текст
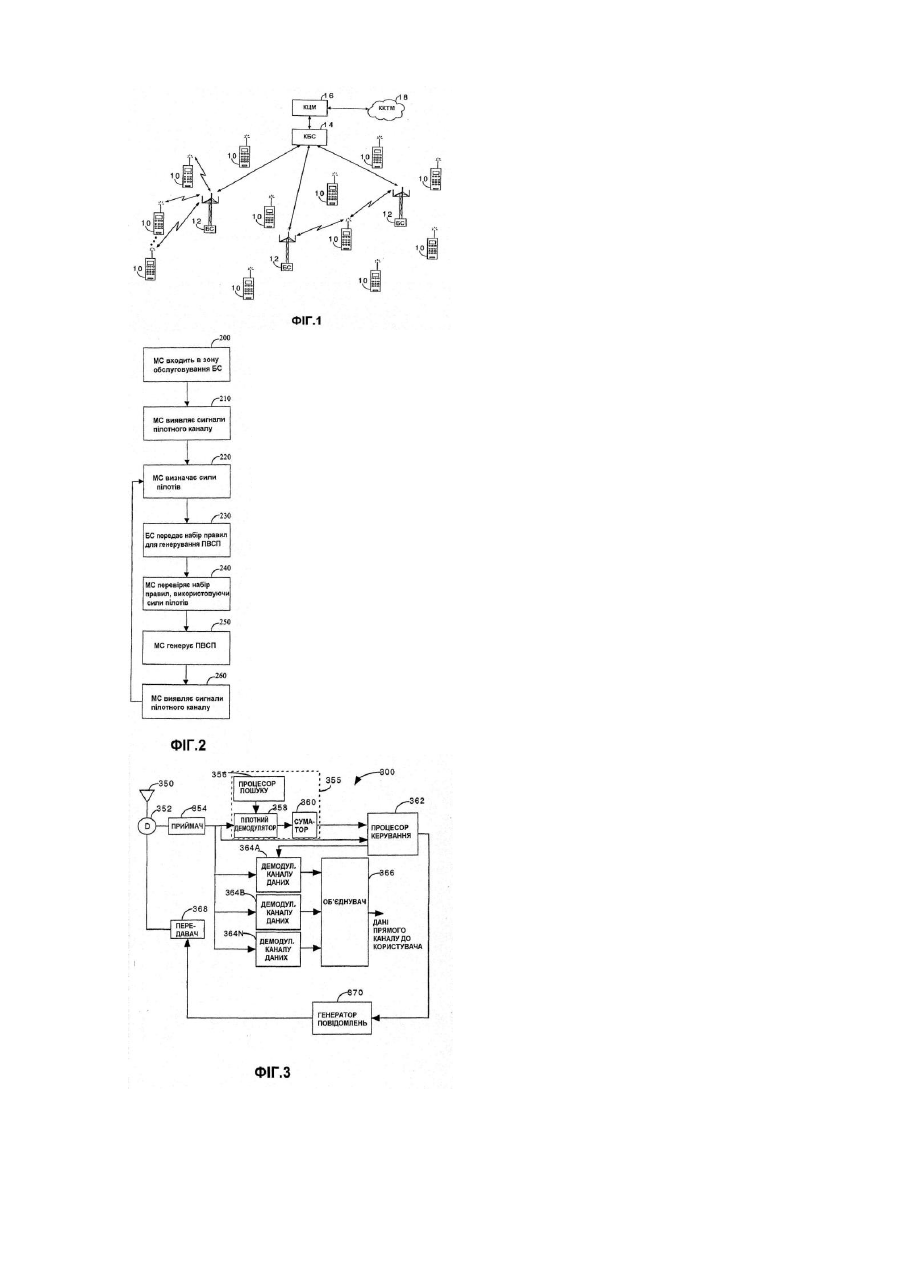
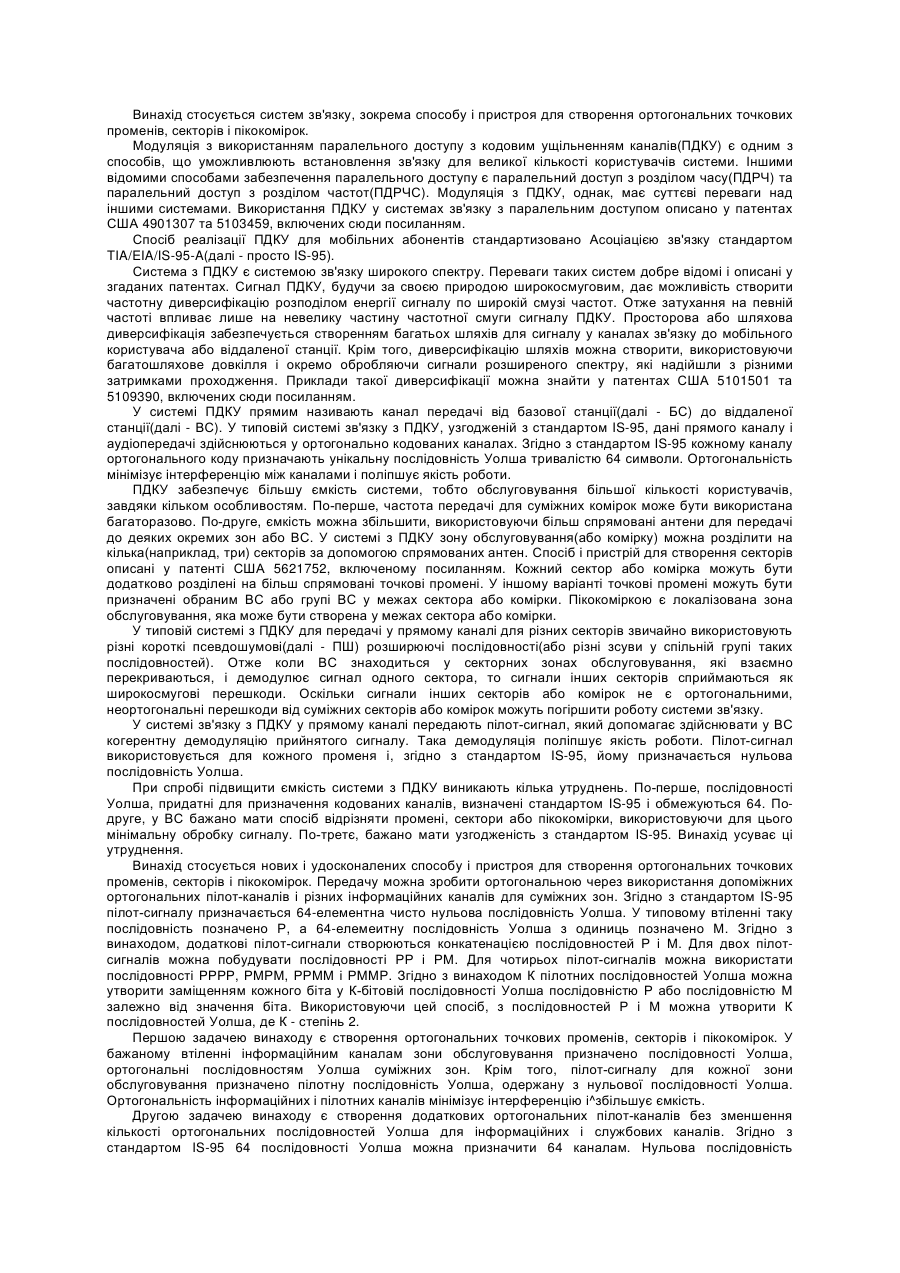
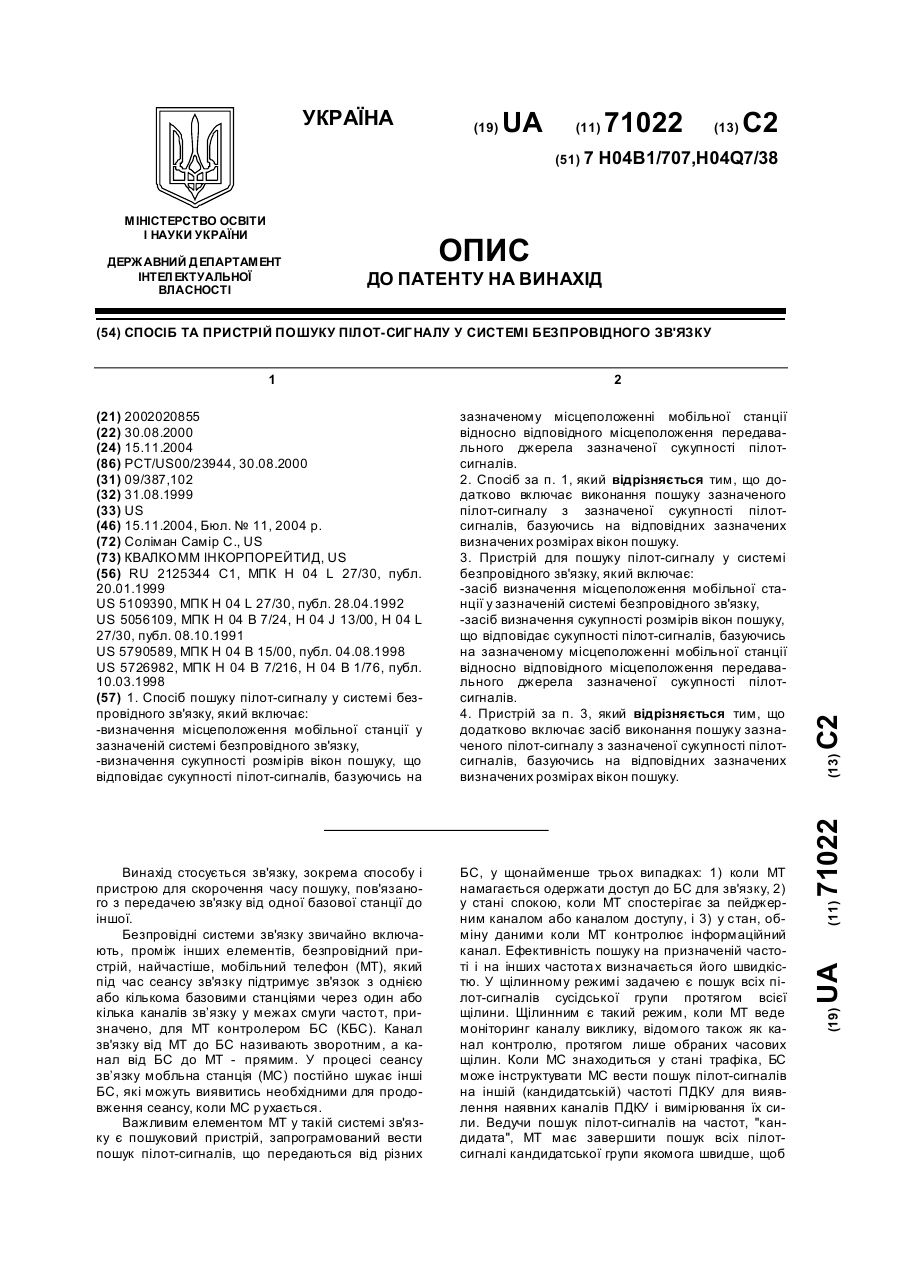
Винахід взагалі стосується зв'язку і, зокрема, генерування повідомлення вимірювань сили пілота у системі безпровідного зв'язку. Для систем зв'язку існують кілька стандартів керування зв'язком між мобільною станцією, наприклад, стільниковим телефоном, апаратом Персональної системи зв'язку (PSC) або іншим віддаленим користувацьким пристроєм і безпровідною базовою станцією. Ці стандарти стосуються як цифрового, так і аналогового зв'язку. Серед цифрових стільникових стандартів можна відзначити стандарт Асоціації зв'язку (ТІА/ЕІА) серії IS-95, що включає стандарти IS-95A і IS-95B, стандарти PSC Американського Національного Інституту Стандартів (ANSI) серії J-STD-008, і не-ПДКУ стандарти, наприклад, GSM для систем паралельного доступ у з розділенням часу (ПДРЧ) і стандарти серії ТІА/ЕІА IS-54. Модуляція з розширенням спектра, яка застосовується у системах ПДКУ, дає значні переваги над іншими типами модуляції систем паралельного доступу. Вона описана у патенті США 4901307, включеному сюди посиланням. Створення багатьох шляхів проходження сигналу дозволяє одержати просторову або шляхову диверсифікацію передач від мобільного користувача через дві або більше комірок. Така диверсифікація створюється також використанням багатошляхового довкілля з індивідуальною обробкою сигналів широкого спектра, що надійшли з різними затримками проходження. Приклади шляхової диверсифікації описані у патентах США 5101501 і 5109390, включених посиланням. Шкідливе явище завмирання може бути до деякої міри контрольоване у системах ПДКУ керуванням потужністю передачі. Система керування потужністю коміркової станції і мобільного пристрою описана у патенті США 5056109 і заявці 07/433031 на патент США від 7/11/1989, включених посиланням. Використання технологій ПДКУ у системі паралельного доступу описане у патенті США 5103459, включеному посиланням. В усіх згаданих вище патентах для встановлення зв'язку у системі ПДКУ передбачено використання пілотсигналу. Кожного разу при ввімкненні живлення безпровідний пристрій, наприклад, стільниковий телефон, виконує процедуру встановлення зв'язку, яка включає, проміж іншим, пошук і виявлення сигналу пілотного каналу від базової станції (далі - БС) безпровідної системи зв'язку. Приклади демодуляції і одержання пілотного каналу у системі ПДКУ описані у заявці 08/509 721 на патент США, включеній посиланням. Якщо пристрій зв'язку виявляє кілька пілотних каналів, він обирає той, сигнал якого є найсильнішим. Після одержання пілотного каналу цей пристрій вважається здатним одержати від БС додаткові канали, потрібні для підтримання зв'язку. Структура і функції цих каналів описані у вже згаданому патенті США 5103459 і у подальшому не розглядаються. Метою процедури пошуку і одержання сигналів пілот-каналу від БС є виявлення БС, що є потенціальними кандидатами на передачу зв'язку. Придатні для цього БС можна розділити на чотири групи для встановлення пріоритетності пілотів і підвищення ефективності пошуку. Перша група, яку називають Активною, включає БС, що мають поточний зв'язок з мобільною станцією (МС). Др уга група, яку називають Кандидатською, включає БС, які, як було виявлено, мають силу сигналу, достатню для використання мобільною станцією. БС додаються до Кандидатської групи, коли виміряна сила їх пілотів перевищує поріг TADD. Третьою є Сусідська група, в яку входять БС, що знаходяться поблизу МС і не входять в Активну або Кандидатську груп у. Решта БС утворюють четверту, Залишкову гр упу. У системі зв'язку IS-95A МС надсилає автономне Повідомлення Вимірювання Сили Пілот-сигналу (ПВСП), коли знаходить достатньо сильний пілот-сигнал, не пов'язаний з будь-яким з Прямих Інформаційних Каналів, що у поточний час піддаються демодуляції, або коли сила пілот-сигналу, пов'язаного з одним з Прямих Інформаційних Каналів, є нижчою за поріг протягом зумовленого періоду. Термін "пілот" стосується пілотканалу, що ідентифікується зсувом пілотної послідовності і призначеною частотою. МС надсилає автономне ПВСП після виявлення зміни сили пілота, якщо існують такі умови: 1. Сила пілота Сусідської або Залишкової групи перевищує поріг TADD. 2. Сила пілота Кандидатської групи перевищує силу пілота Активної гр упи більш, ніж на порогове значення (ТСOMP х 0,5 дБ), і ПВСП з цією інформацією не було надіслане з часу прийому останнього Повідомлення Напрямку Передачі зв'язку (ПНП) або Розширеного Повідомлення Напрямку Передачі зв'язку (РПНП). 3. Сила пілота Активної або Кандидатської групи залишається нижчою за поріг TDROP протягом часу, що перевищує з умовлений період TDROP, і ПВСП з цією інформацією не було надіслане з часу прийому останнього ПНП або РПНП. TADD є порогом, вище якого сила прийнятого сигналу є достатньою для надійного зв'язку з МС. TDROP є порогом, нижче якого сила прийнятого сигналу є недостатньою для забезпечення такого зв'язку. У системі зв'язку IS-95B МС надсилає автономне ПВСП згідно з двома наборами правил, що обираються у БС. Перший з цих наборів збігається з правилами, визначеними IS-95A. Другий набір правил передбачає використання динамічного порогу, який визначається як TDYN = (SOFT_SLOPE/8)´10´log å (Pilot Ec / lo)i + (ADD_lNTERCEPT/2), iÎA де SOFT_SLOPE і ADD_lNTERCEPT визначаються у БС, а підсумовування виконується для всіх пілотів Активної групи. Ес/Іо є відношенням енергії елемента коду пілота до повної спектральної щільності прийнятих шуму і сигналу. Згідно з другим набором правил IS-95B, МС надсилає автономне ПВСП після виявлення зміни сили пілота, якщо існують такі умови: 1. Сила пілота Кандидатської групи перевищує TDYN і ПВСП з цією інформацією не було надіслане з часу прийому останнього РПНП або Загального Повідомлення Напрямку Передачі зв'язку (ЗПНП). 2. Сила пілота Сусідської або Залишкової перевищує max(TDYN,T ADD/2), 3. Сила пілота Кандидатської групи перевищує TDYN і є вищою за силу пілота Активної групи на ТCOMP х 0,5 дБ, причому ПВСП з цією інформацією не було надіслане з часу прийому останнього РПНП або ЗПНП. 4. Таймер припинення передачі зв'язку пілота Активної групи відпрацював і ПВСП з цією інформацією не було надіслане з часу прийому останнього РПНП або ЗПНП. Правила, визначені IS-95A і IS-95B, призначаються для одноносійних систем, які використовують канал 1,25МГц у прямому і зворотному каналах. Однак, у багатоносійних системах МС приймає пілот-канал БС на багатьох частотах-носіях одночасно. Наприклад, багатоносійна система 3Х/1Х може використовувати три канали 1,25МГц у прямому каналі і один канал 1,25МГц у зворотному каналі. Іншим прикладом є багатоносійна система 3Х/3Х, яка використовує три канали 1,25МГц у прямому каналі і канал 3,75МГц у зворотному каналі. У цих випадках можна спостерігати короткочасове завмирання, що змінюється від однієї частоти носія іншої. У такій ситуації правила IS-95, що визначають автономне надсилання ПВСП є неадекватними, коли присутні пілоти у кількох пілот-каналах. Отже, виникає потреба визначати, коли МС передає автономне ПВСП згідно з прийомом багатьох пілот-сигналів від БС у багатоносійній системі. Задачею винаходу є створення способу і пристрою для генерування автономного ПВСП у МС багатоносійної безпровідної системи зв'язку з виконанням операцій прийому у МС сукупності пілотів, переданих щонайменше однією БС; першого визначення сили пілота з групи визначень сили пілота для визначення сили щонайменше одного з цієї сукупності пілотів; перевірки набору правил для генерування ПВСП маніпулюванням першим визначенням сили пілота; і генерування ПВСП для передачі від МС. У одному з варіантів винаходу у наборі правил різні визначення сили пілота використовуються застосуванням одного визначення сили пілота згідно з одним правилом з одночасним застосуванням іншого визначення сили пілота згідно з іншим правилом. У іншому втіленні винаходу ПВСП, генероване у МС, несе інформацію про силу пілота, яка не була використана для генерування ПВСП. У кресленнях: Фіг.1 - схема типової безпровідної системи зв'язку, Фіг.2 - схема алгоритма втілення винаходу і Фіг.3 - блок-схема МС, придатної для застосування винаходу. Фіг.1 містить схему типової безпровідної системи зв'язку, придатної для втілення системи. У бажаному втіленні цією системою є безпровідна система ПДКУ, але винахід може бути застосований також у системах зв'язку інших типів, з іншими схемами модуляції, наприклад, ПДРЧ, і у системах з частотним ущільненням каналів (ПДЧУ). Безпровідна телефонна система ПДКУ включає певну кількість мобільних абонентських пристроїв (станцій) 10, сукупність БС 12, контролери 14 БС (КБС) і комутаторний центр 16 мобільних пристроїв (КЦМ). КЦМ 16 може мати зв'язок з комунальною комутаторною телефонною мережею (ККТМ) 18 і з КБС 14. КБС 14 має зв'язки з БС через окремі лінії, які можуть бути пристосовані для роботи з будь-яким з відомих інтерфейсів, включаючи, наприклад, Е1/Т1, ATM, IP, PPP, Frame Delay, HDSL, ADSL або xDSL. Система може мати більше двох КБС 14. Кожна БС, бажано, включає щонайменше один сектор з всеспрямованою антеною або антеною, спрямованою у певному напрямку радіально від БС 12. У іншому варіанті кожний сектор може мати дві антени для диверсифікації прийому. Кожна БС 12 може бути побудована підтримувати кілька призначень частоти. Сектор і призначення частоти сумісно визначають канал ПДКУ. БС 12 також називають трансіверною підсистемою БС (ТБС) 12. Іноді терміном "базова станція" колективно позначають КБС 14 і один або більше ТБС 12. ТБС 12 також називають "комірками" 12. У іншому варіанті комірками називають окремі сектори ТБС 12. Мобільними абонентськими пристроями 10 звичайно є стільникові телефони або телефони PCS. При роботі типової стільникової телефонної системи БС 12 приймає сукупність сигналів зворотного каналу від сукупності МС 10, які проводять сеанси телефонного або іншого зв'язку. Кожний сигнал зворотного каналу, прийнятий певною БС 12, обробляється у БС. Одержані дані спрямовуються до КБС 14, який забезпечує призначення ресурсів для сеансів зв'язку і розпорядження функціями, пов'язаними з мобільністю, включаючи керування м'яких передач зв'язку між БС 12. КБС 14 також надсилає прийняті дані до КЦМ 16, який, крім того, обслуговує інтерфейс з ККТМ 18. Подібним чином ККТМ має зв'язок з КЦМ 16, а КЦМ 16-3 КБС 14, який, у свою чергу, інстр уктує БС 12 передавати сигнали прямого каналу до сукупності МС 10. Якщо МС переходить з зони обслуговування першої БС одноносійної системи до другої БС цієї системи, виконуються правила IS-95. Якщо МС переходить з зони обслуговування багатоносійної системи до другої багатоносійної системи, то для автономної передачі ПВСП від МС можуть бути використані різні втілення винаходу. Фіг.2 містить блок-схему втілення винаходу, у якому МС у багатоносійній системі автономно генерує ПВСП. Операцією 200 МС входить в зону обслуговування кількох сусідніх БС. Для спрощення розглядаються дії лише однієї БС, хоча зрозуміло, що всі сусідні БС виконують такі ж дії. Операцією 210 МС виконує безперервний пошук і прийом сигналів пілот-каналу на багатьох носіях. Операція 220 визначає силу пілотсигналу згідно з описаними тут визначеннями. Операцією 230 БС передає набір правил для МС, який містить умови, що визначають генерування у МС автономного ПВСП. Слід відзначити, що операція 230 повторюється протягом усього процесу, що розглядається, і тому може виконуватись у будь-який момент виконання цього втілення. Операцією 240 МС порівнює силу сигналів пілот-каналу з умовами, встановленими правилами набору, переданого БС операцією 230. Операцією 250 МС генерує ПВСП, якщо порівняння (опер. 240) задовольняє щонайменше одному з умов для генерування ПВСП. Операцією 260 МС відновлює виявлення сигналів пілот-каналу на багатьох носіях і повторює описані операції. У одному з втілень винаходу сила пілота може бути визначена відносно відношення енергії Ес елемента коду до повної спектральної щільності Іо прийнятих сигналу і шуму, і тоді МС ще може використовувати правила IS-95. Сили пілотів для багатоносійної системи 3Х визначаються таким чином: (1) PS1 = 10´Іоg(первинне пілотне Ес/Іо), де первинний пілот визначається БС (звичайно це пілот з найвищою потужністю передачі). (2) PS2 = 10´log{[Pilot Ес/Іо)1/D1+(Pilot Ec/lo)2 /D2+(Pilot Ес/Іо)3/D 3]/3} де Pilot Ес/Іо - пілотне відношення Ес/Іо, виміряне на і-ій частоті-носії, а Di - відношення потужності передачі і-го пілота до потужності передачі первинного пілота (і = 1, 2, 3). (3) PS3 = 10´log{max[(Pilot Ec/lo)1, (Pilot Ec/lo)2, (Pilot Ec/lo)3 ]} (4) PS4 = 10´log{max[(Pilot Ec/lo)1/D1 , (Pilot Ec/lo)2/D2, (Pilot Ес/Іо)3/D3 ]/3} Хоча наведеними співвідношеннями визначаються сили пілотів багатоносійної системи 3Х, це втілення може бути використане у більших або менших багатоносійних системах з маніпулюванням показниками Ес/Іо сигналів пілот-каналів для інших частот. Згідно з рівнянням (1) сила пілота визначається лише показником Ес/Іо первинного пілота. У рівнянні (2) сила пілота є зваженою сумою всіх трьох пілотів. У рівнянні (3) використане максимальне значення серед трьох пілотів. У рівнянні (4) використовується максимум серед пілотів з корекцією потужності. Бажано використовува ти правила IS-95, яким відповідає рівняння (2). Іншим бажаним рішенням є використання правил IS-95 і визначення сили пілота через рівняння (1), що обмежує для МС пошук пілота первинним каналом. Інший варіант передбачає комбінування визначень сили пілота згідно з окремими правилами набору правил. Наприклад, для визначення сили пілота може бути використане рівняння (3), якщо система застосовує правило 1 або правило 2 IS-95A, а рівняння (2) може бути використане, якщо система застосовує правило 3. Використовуючи таку комбінацію визначень сили пілота, МС сповіщатиме про зростання пілотів Сусідської групи більш агресивно, а скорочення пілотів Активної гр упи більш консервативно. У іншому втіленні винаходу сили пілотів можуть бути визначені згідно з рівняннями: (5-1) PS51 = 10´log[(Pilot Ec/lo)1], (5-2) PS52 = 10´log[(Pilot Ec/lo)2], (5-3) PS53 = 10´log[(Pilot Ec/lo)3], де Ес/Іо для кожного пілота використовується індивідуально. У одному з втілень винаходу визначення сили пілота за рівняннями (5-1), (5-2), (5-3) можуть використовува тись у поєднанні з привилами IS-95, де пілоти на кожному носії піддаються порівнянню згідно з правилами IS-95. У іншому втіленні окремі сили пілота PS51, PS52, PS53 використовуються у новому наборі правил, описаних нижче. 1. Сили пілотів Сусідської і Залишкової груп задовольняють співвідношенням: PS51 > TADD, PS52 > TADD - [10xlog(D2)], PS53 > TADD - [10xlog(D3)]. 2. Всі сили PS51, PS52 , PS53 пілотів Кандидатської групи перевищують відповідну силу будь-якого пілота Активної групи на (ТCOMP х 0,5 дБ), а ПВСП, яке несе цю інформацію, не надсилалось з часу прийому останнього ПНП або РПНП. 3. Таймер припинення передачі зв'язку пілота Активної гр упи відпрацював, тобто PS51 < TDROP , PS52 < TDROP - [10 xlog(D2)], PS53 < TDROP – [10xlog(D3)] протягу щонайменше інтервалу TTDROP, а ПВСП, яке несе цю інформацію, не надсилалось з часу прийому останнього ПНП або РПНП. Коли сили пілотів PS51, PS52, PS53 використовуються у наведеному наборі правил, і задовольняється щонайменше одна з наведеної групи умов, МС автономно передає ПВСП до обслуговуючої БС. Слід відзначити, що винахід включає модифікації наведених вище правил згідно з рівняннями (5-1), (5-2), (5-3). Наприклад, Правило 2 наведеного набору правил може бути замінене таким правилом: Варіант 2. Будь-яка з сил PS51, PS52, PS53 пілотів Кандидатської групи перевищують відповідну силу будьякого пілота Активної групи на (ТCOMP х 0,5 дБ), а ПВСП, яке несе цю інформацію, не надсилалось з часу прийому останнього ПНП або РПНП. Комбінування сил PS51, PS52, PS5 3 пілотів з іншими їх визначеннями, наприклад, PS1, PS2, PS3 і PS4, дає інші втілення винаходу. Можуть бути застосовані такі комбінації цих сил, у яких одна умова набору правил використовує одне визначення сили пілота, а інше визначення сили пілота використовується у поєднанні з іншою умовою. Розглянуті втілення винаходу призначаються для застосування у МС, що переходить з однієї багатоносійної системи у іншу. Проте ці втілення можуть бути модифіковані для випадку переходу МС з багатоносійної системи в одноносійну і навпаки. У одному з втілень, пов'язаному з переходом МС з багатоносійної системи в одноносійну, ця одноносійна система використовує один з каналів багатоносійної системи. У іншому випадку ситуація перетворюється на жорстку передачу зв'язку, тобто таку, коли МС переходить між роз'єднаними групами БС з різними класами діапазонів частот, різними призначеннями частот або різними тривалостями кадрів. Процедура жорсткої передачі зв'язку далі не розглядається. У випадку, коли дві БС не входять одночасно в Активну гр упу, Активна група багатоносійних пілотів заміщується новою Активною групою одноносійних пілотів. Слід відзначити теоретичну можливість м'якої передачі зв'язку між БС 3Х/1Х (тобто БС, що використовує трьох носіїв у прямому каналі і одного носія у зворотному каналі) і між БС 1Х/1Х (тобто БС, що використовує одного носія у прямому каналі і одного носія у зворотному каналі), якщо у прямому каналі використовується одна і та ж швидкість кодування, а у зворотному каналі використовуються однакові РЧ канали і радіоконфігурації. У бажаному втіленні такого типу передачі зв'язку використовується сигнал пілот-каналу багатоносійної системи, який відповідає сигналу пілот-каналу одноносійної системи. Якщо канал не є первинним каналом багатоносійної системи, то пілот, пов'язаний з цим каналом має потужність передачі, знижену масштабуванням коефіцієнтом D. Тому цей коефіцієнт для ТСОМР і TDROP має бути відкинутий перед порівнянням. Інше втілення включає використання рівняння (2) для визначення зваженої суми всіх пілотів багатоносійної системи і використання цієї зваженої суми у правилах IS-95. У іншому варіанті система може уникнути передачі зв'язку між багатьма БС шляхом переходу від багатьох носіїв до одного носія у обслуговуючій БС і виконання передачі зв'язку від одного носія до іншого згідно з IS 95. Коли МС переходить з одноносійної системи у багатоносійну, ця одноносійна система використовує один з каналів багатоносійної системи. У іншому разі виникає ситуація жорсткої передачі зв'язку і виконується відповідна процедура. У випадку, коли дві БС не входять одночасно в Активну гр упу, Активна група багатоносійних пілотів заміщується новою Активною групою одноносійних пілотів. Слід відзначити теоретичну можливість м'якої передачі зв'язку між БС, що використовує одного носія у прямому каналі і одного носія у зворотному каналі, і між БС, що використовує кілька носіїв у прямому каналі і одного носія у зворотному каналі, якщо у прямому каналі використовується одна і та ж швидкість кодування, а у зворотному каналі використовуються однакові РЧ канали і радіоконфігурації. У одному з бажаних втілень такого типу передачі зв'язку застосовуються правила IS-95 з використанням пілота одноносійної системи. Якщо канал не є первинним каналом багатоносійної системи, то пілот, пов'язаний з цим каналом, має потужність передачі, знижену масштабуванням коефіцієнтом D. Тому цей коефіцієнт для ТСОМР і TDROP має бути відкинутий перед порівнянням. Як уже відзначалось, інше втілення передбачає використання рівнянь (1) і (2) для обчислення сил пілотів багатоносійної системи і використання результату згідно з правилами IS-95. У іншому варіанті система може уникнути переходу від одноносійної системи до багатоносійної шляхом переходу від одного до кількох носіїв в обслуговуючій БС з подальшою передачею зв'язку від багатоносійної системи до багатоносійної подібно до переходу між системами 3Х. Як тільки у МС приймається рішення виконати автономну передачу ПВСП до БС безпровідної системи зв'язку, виникає необхідність визначити вміст ПВСП, У деяких втіленнях винаходу бажано передавати силу PS2 кожного пілота, внесеного у ПВСП, Відповідно, було б бажано також передавати сили PS2, PS3 і PS4 пілотів і/або сили PS51, PS52, PS53 для кожного пілота, внесеного у ПВСП. Отже, МС може генерувати ПВСП, яке несе інформацію про силу пілота, визначену через співвідношення, які не використовуються при порівнянні сил пілотів з пороговими значеннями. Якщо передаються PS51, PS52, PS53, поле сили пілота у ПВСП має бути втричі більшим. Іншим важливим полем ПВСП є поле фази пілотного псевдошуму (ПШ). Ця фаза використовується для визначення зсуву ПШ, яким ідентифікується пілот-канал, і для оцінювання затримки на проходження сигналу між МС і БС. Один з варіантів передбачає передачу значення фази першого прийнятого багатошляхового пілота з тих, що надійшли на всіх трьох носіях і були внесені у ПВСП. У іншому варіанті передається передачу значення фази першого (за часом) прийнятого багатошляхового первинного пілота. Ще один варіант передбачає передачу значення фази першого прийнятого багатошляхового пілота з тих, що мають найвищу силу (найвище Ес/Іо). Ін ший варіант передбачає запровадження кількох полів фази ПШ для ПШ кожного пілота. Фіг.3 містить блок-схему МС, пристосованої для реалізації способу Фіг.2. МС 300 безперервно або з інтервалами виміряє сили пілот-сигналів сусідніх БС. Пілот-сигнали можуть передаватись на кількох частотахносіях. Сигнали, прийняті антеною 350 МС 300 через антенний перемикач 352 надходять до приймача 354, який підсилює сигнал, знижує його частоту, фільтрує і надсилає до пілотного демодулятора 358 підсистеми 355 пошуку. Крім того, прийняті сигнали надходять до демодуляторів 364A-354N даних. Демодулятори 364A-354N або їх підгрупа окремо демодулюють сигнали, прийняті МС 300. Демодульовані сигнали надходять до об'єднувача 366, який об'єднує демодульовані дані і цим формує поліпшену оцінку переданих даних. МС 300 виміряє силу пілот-каналів. Процесор 362 керування надає параметри доступу, визначені базовими станціями для процесора 356 пошуку. Процесор 362 керування надає параметри доступу, необхідні для реалізації способу, ілюстрованого Фіг.2. Процесор 362 зберігає у пам'яті 372 параметри пілот-сигналів, включаючи (у типовій системі ПДКУ) значення сил пілотів, зсуви ПШ і частоту, і звертається до пам'я ті 372 для визначення розкладу пошуків пілотів підсистемою 355 пошуку. Процесор 362 керування може бути звичайним мікропроцесором. У типовому втіленні системи ПДКУ процесор 362 надає зсув ПШ для процесора 356 пошуку для пошуку наступного пілот-сигналу. Процесор 356 пошуку генерує ПШ послідовність, яку використовує пілотний демодулятор 358 для демодулювання прийнятого сигналу. Демодульований пілот-сигнал надходить до накопичувача 360 енергії, який виміряє енергію демодульованого пілот-сигналу, акумулюючи енергію на зумовленому інтервалі часу і надсилаючи зразки накопиченої енергії до процесора 362 керування. У типовому втіленні процесор 362 виконує цифрове фільтрування цих зразків згідно з визначеннями сили пілота, розглянутими вище, і формує значення сили пілота, після чого порівнює одержані значення з порогами TADD і TDROP. Процесор 362 керування надсилає ідентифікатори пілотів і значення їх сили до генератора 370 повідомлень, який формує ПВСП, що містить цю інформацію. ПВСП надходить до передавача 368, який кодує, модулює, підвищує частоту і підсилює це повідомлення, після чого ПВСП надходить через антенний перемикач 352 до антени 350 для передачі. Отже були описані спосіб і пристрій для генерування повідомлень про вимірювання сили пілотів. Наведений опис бажаних втілень дозволяє фахівцю застосувати винахід, за необхідності зробивши необхідні модифікації з використанням принципів винаходу і, отже, створюючи цим інші втілення винаходу. Винахід не обмежується наведеними втіленнями і має значно ширший об'єм, визначений принципами і новими ознаками.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod (variants) and device (variants) for generating pilot signal strength measurement messages
Автори англійськоюRezajifar Ramin, Chen Tao
Назва патенту російськоюСпособ (варианты) и устройство (варианты) для формирования сообщений об измерении мощности контрольных сигналов
Автори російськоюРезайифар Рамин, Чен Тао
МПК / Мітки
Мітки: сили, пілот-сигналу, генерування, вимірювання, спосіб, варіанти, повідомлення, пристрій
Код посилання
<a href="https://ua.patents.su/5-72787-sposib-varianti-i-pristrijj-varianti-dlya-generuvannya-povidomlennya-pro-vimiryuvannya-sili-pilot-signalu.html" target="_blank" rel="follow" title="База патентів України">Спосіб (варіанти) і пристрій (варіанти) для генерування повідомлення про вимірювання сили пілот-сигналу</a>
Спосіб створення допоміжного пілот-сигналу, спосіб його прийому і пристрій для його здійснення та спосіб індивідуальної передачі
Номер патенту: 63963
Опубліковано: 16.02.2004
Автори: Оденвалдер Джозеф П., Ландбі Стайн А., Тідеманн Едвард Г., мол.
МПК: H04B 1/707, H04J 11/00, H04B 7/26
Мітки: допоміжного, пілот-сигналу, прийому, спосіб, індивідуальної, передачі, здійснення, створення, пристрій
Формула / Реферат:
1. Спосіб створення допоміжного пілот-сигналу, який передбачає операції: прийому пілотних даних і покриття зазначених пілотних даних пілотною послідовністю Уолша, яку утворюють конкатенацією основної послідовності Уолша і її комплементарної послідовності.2. Спосіб за п. 1, який відрізняється тим, що зазначена основна послідовність Уолша є послідовністю нулів.3. Спосіб за п. 1, який відрізняється тим, що зазначена основна...
Спосіб та пристрій пошуку пілот-сигналу у системі безпровідного зв’язку
Номер патенту: 71022
Опубліковано: 15.11.2004
Автор: Соліман Самір С.
МПК: H04Q 7/38, H04B 1/707
Мітки: безпровідного, пристрій, пілот-сигналу, системі, зв'язку, пошуку, спосіб
Формула / Реферат:
1. Спосіб пошуку пілот-сигналу у системі безпровідного зв'язку, який включає: -визначення місцеположення мобільної станції у зазначеній системі безпровідного зв'язку, -визначення сукупності розмірів вікон пошуку, що відповідає сукупності пілот-сигналів, базуючись на зазначеному місцеположенні мобільної станції відносно відповідного місцеположення передавального джерела зазначеної сукупності пілот-сигналів.2. Спосіб за п....
Безпроводовий передавач (варіанти), канал зв’язку (варіанти) і спосіб модулювання інформаційного сигналу (варіанти)
Номер патенту: 62980
Опубліковано: 15.01.2004
Автор: Джоу Ю-Чен
МПК: H04J 13/02, H04L 25/03, H04L 5/02, H04L 27/26, H04J 11/00
Мітки: зв'язку, безпроводовій, передавач, варіанти, сигналу, спосіб, канал, модулювання, інформаційного
Формула / Реферат:
1. Безпроводовий передавач, який має: кодер для кодування набору інформаційних біт для створення сукупності кодових символів з швидкістю передачі даних; демультиплексор для створення зазначеної сукупності кодових символів у першій і другій підгрупах кодових символів, які мають різні швидкості кодових символів, для першого і другого модуляторів, причому зазначена швидкість передачі даних дорівнює комбінованим зазначеним різним швидкостям...
Пристрій для передачі інформаційного сигналу (варіанти) та пристрій для прийому інформаційного сигналу (варіанти)
Номер патенту: 66408
Опубліковано: 17.05.2004
Автори: Сейнтс Кіт, Ландбі Стайн С.
МПК: H04L 1/02, H04B 7/06, H04B 1/707
Мітки: пристрій, варіанти, інформаційного, сигналу, передачі, прийому
Формула / Реферат:
1. Пристрій для передачі інформаційного сигналу, який включає:- перший засіб перемежування для прийому першої частини зазначеної інформації і переупорядкування символів зазначеної першої частини згідно з першим форматом перемежування для одержання першого переміжного сигналу,- першу передавальну підсистему для прийому першого переміжного сигналу і передачі зазначеного першого переміжного сигналу у першому каналі...
Спосіб генерування пари і парогенеруючий пристрій (варіанти)
Номер патенту: 51321
Опубліковано: 15.11.2002
Автори: Мартинов Сергій Олександрович, Борисов Анатолій Аркадійович
МПК: F22B 29/00
Мітки: генерування, пари, варіанти, пристрій, парогенеруючий, спосіб
Формула / Реферат:
1. Спосіб генерування пари, що передбачає закручування потоку робочого середовища, який відрізняється тим, що потік робочого середовища розривають, шляхом надання йому форми спіралі, що сходиться.2. Парогенеруючий пристрій, що містить циліндричний корпус з центральним паровідвідним патрубком, вхідну і вихідну вихрові камери, які забезпечені відповідно вхідним тангенціальним і вихідним патрубками, а також розміщений у вхідній вихровій...
Попередній патент: Вимірювальний перетворювач магнітного поля
Випадковий патент: Модифікована лігатурна голка дешана