Спосіб та пристрій пошуку пілот-сигналу у системі безпровідного зв’язку
Формула / Реферат
1. Спосіб пошуку пілот-сигналу у системі безпровідного зв'язку, який включає:
-визначення місцеположення мобільної станції у зазначеній системі безпровідного зв'язку,
-визначення сукупності розмірів вікон пошуку, що відповідає сукупності пілот-сигналів, базуючись на зазначеному місцеположенні мобільної станції відносно відповідного місцеположення передавального джерела зазначеної сукупності пілот-сигналів.
2. Спосіб за п. 1, який відрізняється тим, що додатково включає виконання пошуку зазначеного пілот-сигналу з зазначеної сукупності пілот-сигналів, базуючись на відповідних зазначених визначених розмірах вікон пошуку.
3. Пристрій для пошуку пілот-сигналу у системі безпровідного зв'язку, який включає:
-засіб визначення місцеположення мобільної станції у зазначеній системі безпровідного зв'язку,
-засіб визначення сукупності розмірів вікон пошуку, що відповідає сукупності пілот-сигналів, базуючись на зазначеному місцеположенні мобільної станції відносно відповідного місцеположення передавального джерела зазначеної сукупності пілот-сигналів.
4. Пристрій за п. 3, який відрізняється тим, що додатково включає засіб виконання пошуку зазначеного пілот-сигналу з зазначеної сукупності пілот-сигналів, базуючись на відповідних зазначених визначених розмірах вікон пошуку.
Текст
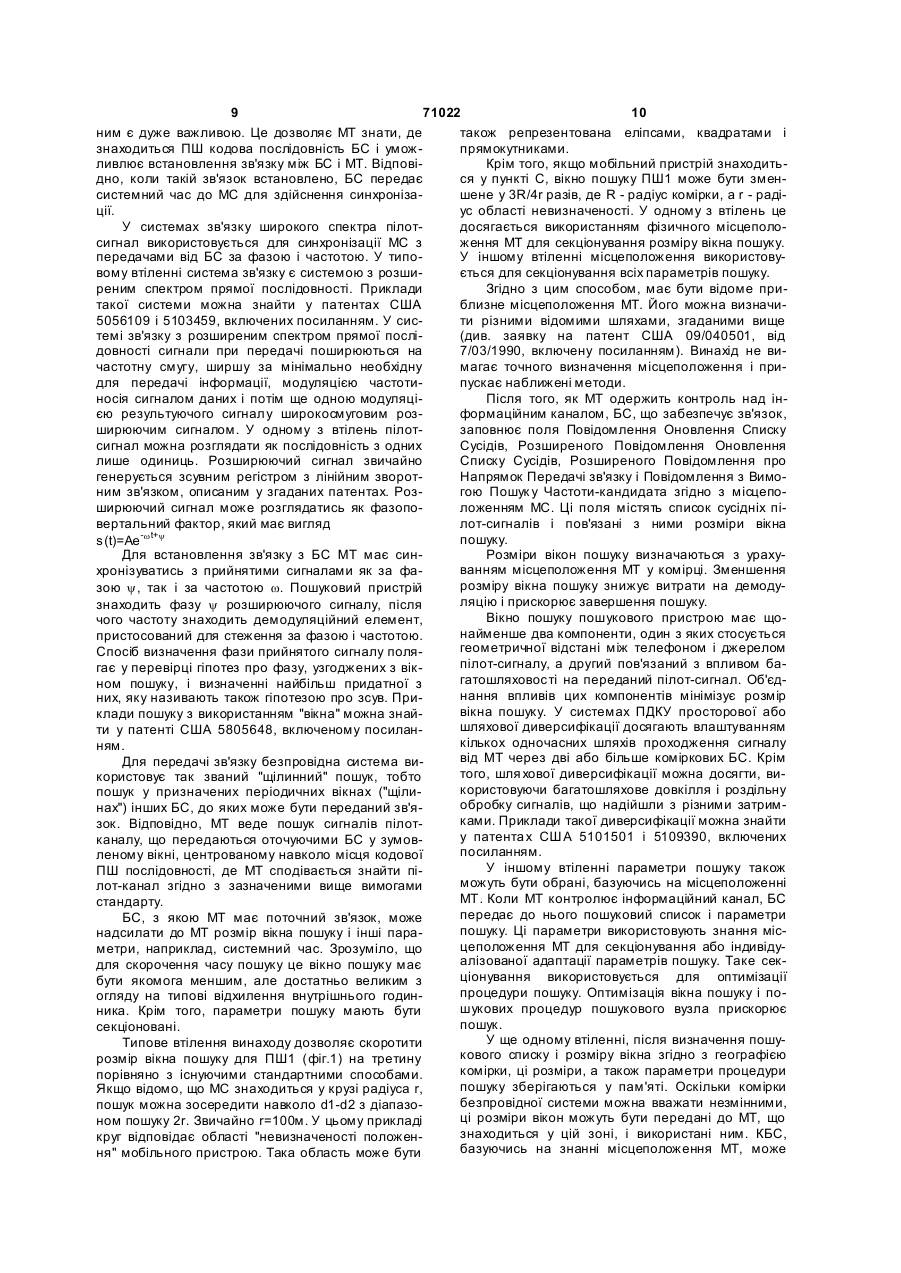
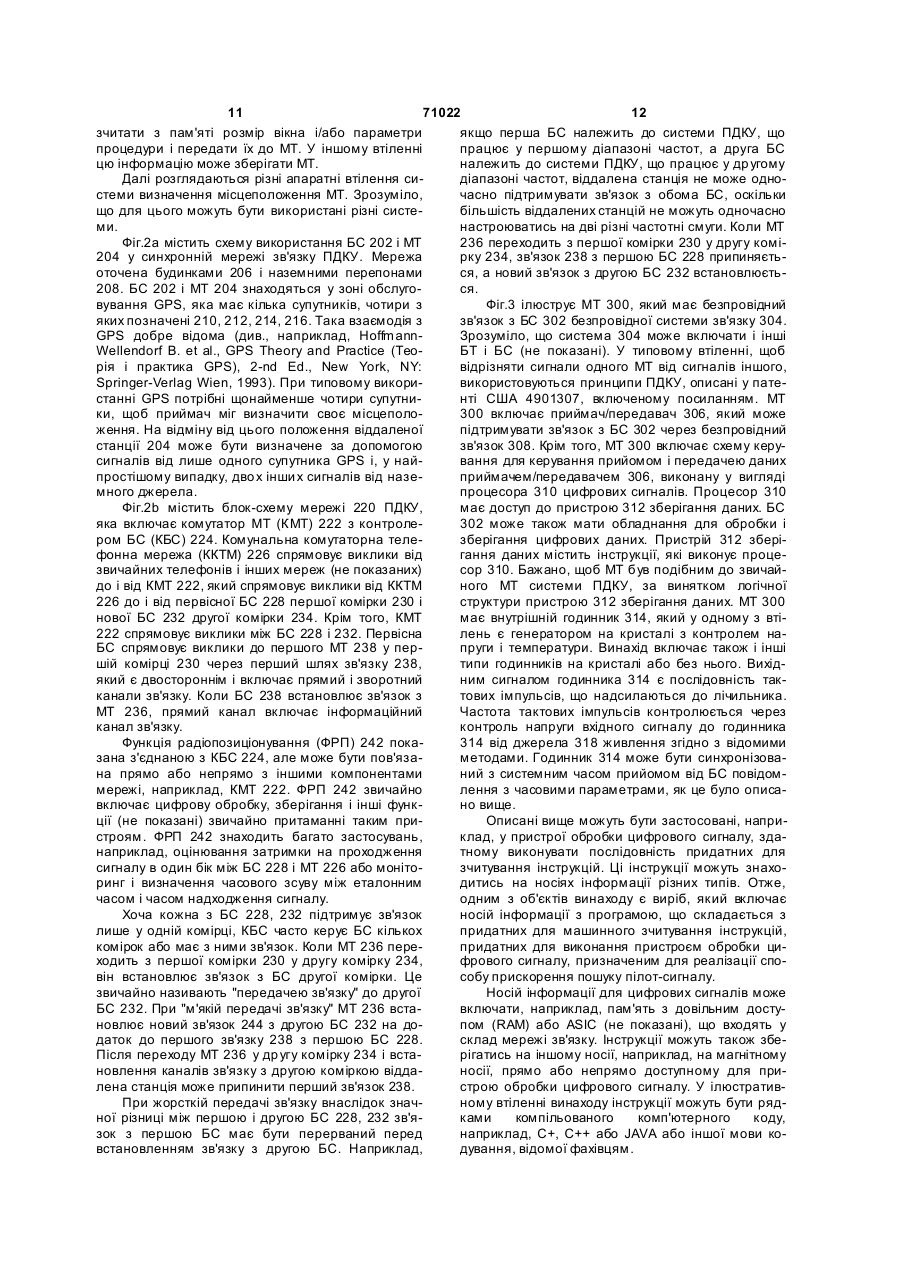
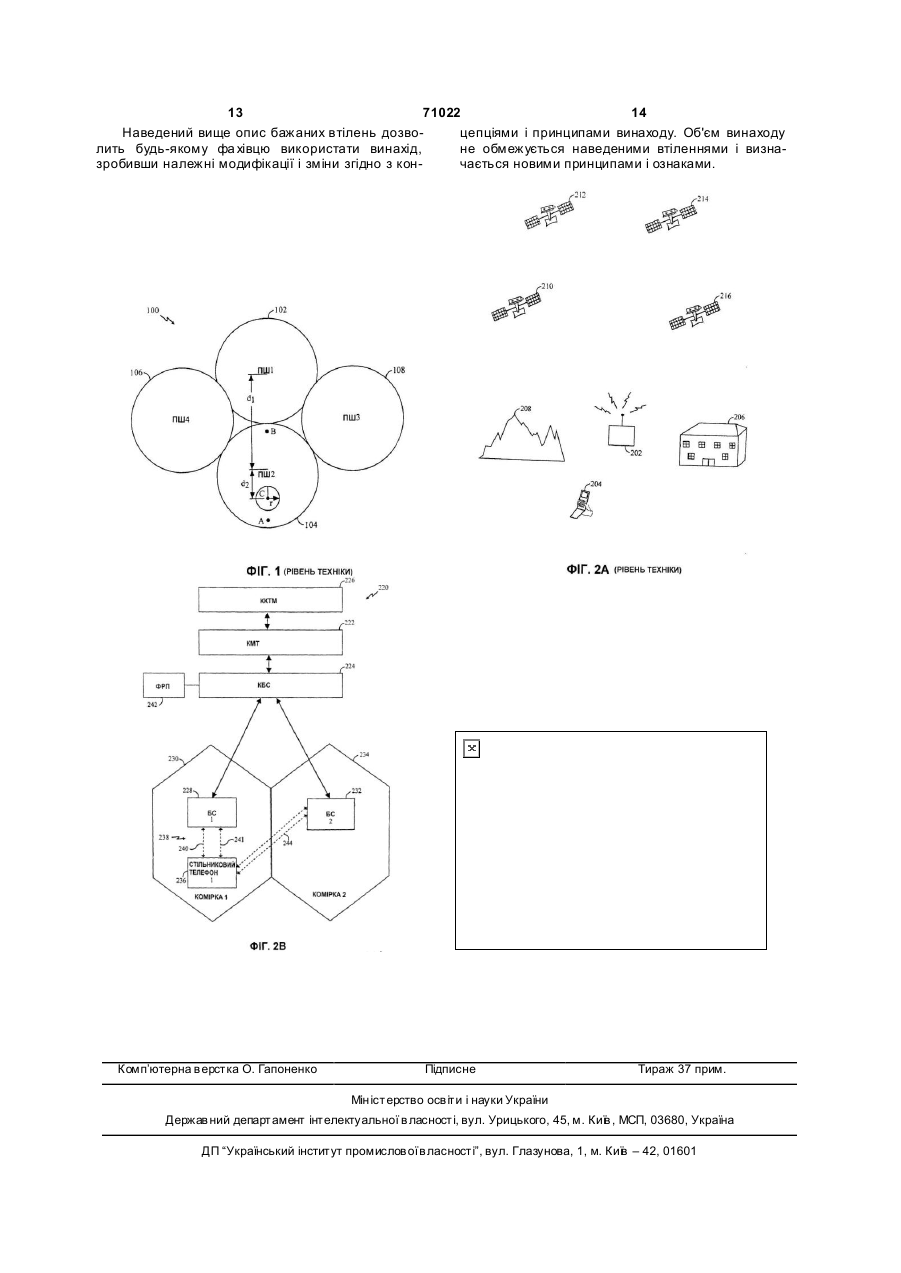
1. Спосіб пошуку пілот-сигналу у системі безпровідного зв'язку, який включає: -визначення місцеположення мобільної станції у зазначеній системі безпровідного зв'язку, -визначення сукупності розмірів вікон пошуку, що відповідає сукупності пілот-сигналів, базуючись на C2 2 (19) 1 3 71022 4 перестроюсь назад на робочу частоту і мінімізувапішної демодуляції Інформаційних Прямих Каналів ти спотворення голосу, викликане пошуком частоЗв'язку. ти кандидата. Як показано нижче, частота канди- Сусідська група: Пілот-сигнали, що не входата є потенційною частотою передачі зв'язку і дять ні Активну, ні в Кандидатську групу, але є такий пошук слугує для координації передач зв'язможливими кандидатами для передачі зв'язку. ку у системі. - Залишкова група: Всі пілот-сигнали признаА. Передачі зв'язку ченої частоти за винятком пілот-сигналів Активної, МТ у безпровідній системі зв'язку з паралельКандидатської і Сусідської груп. Ця група складаним доступом і кодовим ущільненням каналів ється з пілот-сигналів, чиї зсуви пілотної псевдо(ПДКУ) може виконувати три типи процедур перешумової (ПШ) послідовності дорівнюють цілій кільдачі зв'язку, коли він контролює інформаційний кості певних інкрементних пілотних значень. канал. Використання ПДКУ описане у патенті США БС може інструктувати МТ почати пошук пілот4901307, включеному сюди посиланням. Цими сигналів на іншій частоті ПДКУ для виявлення катрьома типами є: налів ПДКУ і вимірювання їх сили. МС залишає 1. М'яка передача зв'язку, при якій МТ встаноактивний канал ПДКУ і веде пошук пілот-сигналів у влює зв'язок з новою БС, не перериваючи зв'язку з групі пошуку частоти-кандидата. Після закінчення старою БС. Таку передачу зв'язку можна виконупошуку МТ сповіщає БС про результати вимірювати лише між каналами ПДКУ однакової частоти. вань. Залежно від цих результатів БС може інстру2. Жорстка передача зв'язку від ПДКУ до ктувати МТ виконати міжчастотну жорстку передаПДКУ, яка виконується, коли МТ переходить між чу зв'язку. ізольованими групами БС, що працюють на різних Параметри пошуку пілот-сигналів визначаютьчастотах і з різними кадровими зсувами. ся такими групами пілот-сигналів: 3. Передача зв'язку від ПДКУ до аналогової - Сусідська група Частсти-кандидата: список системи, яка відбувається, коли МТ спрямовується пілот-сигналів на частоті-кандидаті. від прямого каналу зв'язку ПДКУ до аналогового - Пошукова гр упа Частоти-кандидата: підгрупа голосового каналу. Сусідської групи Частоти-кандидата, на пошук у Щоб виконати м'яку передачу зв'язку, МТ безякій може інструктувати БС. перервно веде пошук призначеної групи пілотВ. Пошук пілот-сигналу сигналів, тобто пілот-каналів, що характеризуютьУ сучасних системах БС встановлює вікно пося зсувом пілотної послідовності і призначеною шуку, тобто діапазон зсувів ПШ, у якому МТ має частотою. Пілот-канал пов'язаний з інформаційним вести пошук придатних багатошля хових компонепрямим каналом у одному прямому каналі зв'язку. нтів активних пілот-сигналів. Ці компоненти викоПодібним чином, у системі, де використовуються ристовуються у МТ для демодуляції пов'язаного з зворотні пілот-канали, вони пов'язані з зворотним ними інформаційного прямого каналу. Критерії каналом. Усім пілот-сигналам призначається одна пошуку і загальні критерії для безпровідної систеі та ж частота ПДКУ. Далі розглядатимуться лише ми зв'язку визначені стандартами ТІА/ЕІА 95х і пілот-сигнали прямого каналу зв'язку. ТІА/ЕІА-98-В Асоціації Зв'язку і стандартом ANSI JМТ веде пошук пілот-сигналів на поточній приSTD-018 Американського Інституту Стандартів, значеній частоті ПДКУ для виявлення каналів включеними посиланням, і надсилаються як часПДКУ і вимірювання сили їх сигналів. Коли МТ тина Повідомлення про Параметри Трафіка Сисзнаходить пілот-сигнал достатньої сили, не пов'ятеми, Розширеного Повідомлення про Напрямок заний з жодним з вже призначених інформаційних Передачі зв'язку і Повідомлення з Вимогою Пошупрямих каналів, він надсилає до БС, з якою має ку Частоти-кандидата. Пошук визначається такими поточний зв'язок, повідомлення з результатом вимогами. вимірювання сили пілот-сигналу. У відповідь БС - Активна і Кандидатська групи: Процедури призначає МТ інформаційний прямий канал, пов'япошуку пілот-сигналів цих гр уп є однаковими. Роззаний з цим пілот-сигналом, і інструктує МТ викомір вікна пошуку (SRCH_WIN_A) для кожного пінати передачу зв'язку. лот-сигналу цих гр уп визначається кількістю елеПараметри пошуку пілот-сигналів і правила ментів ПШ коду (табл.). Наприклад, вимірювання їх сили визначаються для таких гр уп (SRCH_WIN_AS=6 відповідає вікну пошуку з 28 пілот-сигналів. елементів коду (±14 елементів ПШ коду навколо - Активна група: Пілот-сигнали, пов'язані з Інцентра вікна пошуку). МС центрує вікно пошуку формаційними Прямими Каналами Зв'язку, придля кожного пілот-сигналу Активної і Кандидатсьзначеними МТ. кої груп навколо найранішнього з прийнятих бага- Кандидатська група: Пілот-сигнали, що не тошляхови х компонентів пілот-сигналу. входять в Активну гр упу, але були прийняті МТ і мали достатню силу, що вказує на можливість ус 5 71022 6 Таблиця SRCH_WIN_A SRCH_WIN_N SRCH_WIN_NGHB RSRCH_WIN_R CF_SRCH_WIN_N 0 1 2 3 4 5 6 7 Розмір вікна (елементів ПШ коду) 4 6 8 10 14 20 28 40 - Сусідська група: якщо встановлено флаг іншого вікна пошуку сусідів, вікно пошуку для кожного пілот-сигналу Сусідської групи визначається кількістю елементів ПШ коду з табл., яка відповідає параметру цього вікна, пов'язаному з цим пілот-сигналом. Якщо цей флаг не встановлено, вікно пошуку для кожного пілот-сигналу Сусідської групи є однаковим і визначається кількістю елементів ПШ коду з табл., яка відповідає SRCH_WIN_NS. MC центрує вікно пошуку для кожного пілот-сигналу цієї групи навколо зсуву пілотної ПШ послідовності, використовуючи часові параметри, визначені часовим еталоном МТ. - Залишкова група: вікно пошуку для кожного пілот-сигналу цієї гр упи визначається кількістю елементів ПШ коду з табл., яка відповідає SRCH_WIN_RS. MC центрує вікно пошуку для кожного пілот-сигналу Залишкової групи навколо зсуву пілотної ПШ послідовності, використовуючи часові параметри, визначені часовим еталоном МТ. МТ веде пошук пілот-сигналів, чиї зсуви пілотної псевдошумової (ПШ) послідовності дорівнюють цілій кількості інкрементних пілотних значень. - Група пошуку Частоти-кандидата: якщо встановлено флаг частоти-кандидата, вікно пошуку для кожного пілот-сигналу Сусідської групи визначається кількістю елементів ПШ коду з табл., яка відповідає SRCH_WIN_NGHBR, пов'язаному з цим пілот-сигналом. Якщо цей флаг не встановлено, вікно пошуку для кожного пілот-сигналу Сусідської групи визначається кількістю елементів ПШ коду з табл., яка відповідає CF_SRCH_WIN_N. MC центрує вікно пошуку для кожного пілот-сигналу цієї групи навколо зсуву пілотної ПШ послідовності, використовуючи часові параметри, визначені часовим еталоном МТ. С. Час пошуку Кожний виробник телефонів передбачає власну стратегію пошуку, але у всі х випадках тривалість пошуку залежить від розміру вікна і обладнання пошукового пристрою. На певному обладнанні тривалість пошуку є лінійно пропорційною розміру вікна і кількості пілот-сигналів, що підлягають пошуку. Зменшенням розміру вікна пошуку можна досягти суттєвого зниження тривалості пошуку. Якщо МС не може своєчасно знайти "більший" пілот-сигнал, цей пілот-сигнал може стати джерелом перешкод і викликати деградацію SRCH_WIN_A SRCH_WIN_N SRCH_WIN_NGHB RSRCH_WIN_R CF_SRCH_WIN_N 8 9 10 11 12 13 14 15 Розмір вікна (елементів ПШ коду) 60 80 100 130 160 226 320 452 голосу або припинення сеансу зв'язку, якщо МС знаходиться у стані трафіка. Швидкість пошуку є вирішальним фактором при виконанні у МС вимірювання, а оптимізація кількості пілот-сигналів у списку пошуку є ключовим компонентом стратегії пошуку. У існуючих процедурах розміри вікна визначаються, головним чином, розміром зони обслуговування комірки. Коміркою є географічний регіон, який обслуговується БС, що забезпечує зв'язок для МТ. Звичайно список пошуку містить всі можливі сусідні пілот-сигнали незалежно від місцезнаходження телефону. На фіг.1 зображені чотири такі комірки. Незалежно від місцеположення МТ у зоні обслуговування поточному вікну пошуку надається розмір, що відповідає найгіршим умовам, тобто випадку, коли МТ знаходиться на максимальному віддаленні від БС у межах комірки. У пейджерному або інформаційному каналі МТ центрує його вікно пошуку для кожного пілотсигналу Сусідської групи навколо зсуву пілотної ПШ послідовності, використовуючи власний часовий еталон, який визначається найранішнім з прийнятих багатошляхови х сигналів. Розмір вікна пошуку визначається найгіршим випадком. На фіг.1 зображені чотири суміжні комірки 102, 104, 106, 108 системи 100, кожна з яких має пілот-сигнали ПШ1, ПШ2, ПШ3, ПШ4. Розмір вікна пошуку пілот-сигналу ПШ1 визначається для випадку, коли МТ знаходиться у пункті А. Однак, для пошуку використовується те ж вікно і тоді, коли МТ знаходиться у п ункті В. Це призводить до невиправданих витрат ресурсів пошукового пристрою, оскільки не враховується місцезнаходження МТ у комірці. Якщо МТ знаходиться у пункті В, вікно пошуку має бути меншим, ніж у випадку знаходження МТ у п ункті А. D. Способи визначення місцезнаходження Існують багато процедур автоматичного визначення місцеположення МТ. Один з способів передбачає вимірювання різниць часів надходження сигналів від кількох БС. Ці сигнали "тріангулюються" для одержання даних про місцеположення. Ця техніка потребує високої концентрації комірок і/або підвищеної потужності передачі у комірках, оскільки звичайні системи ПДКУ передбачають для МТ потужність передачі, достатню лише для зв'язку з найближчою БС. Тріангуляція вимагає підтримання зв'язку з щонайменше трьо 7 71022 8 ма БС і тому концентрація комірок має бути висомісцезнаходження також може бути використане кою або потужність передачі МТ має бути підвидля визначення розмірів вікон пошуку і параметрів щена. Інший спосіб передбачає додаткове викорипошуку для всі х пілот-сигналів, ідентифікованих у стання GPS (Global Positioning System (Глобальна групі пілот-сигналів. Розмір вікна пошуку також система визначення місцеположення)) і вимагає визначається з використанням місцеположення наявності у межах прямої видимості чотирьох суМТ і іншого компонента, пов'язаного з багатошляпутників (трьох для двомірного рішення). Цей споховістю переданого пілот-сигналу. сіб є дещо повільним, але забезпечує найвищу Інше втілення винаходу передбачає виріб, точність. який містить цифрову інформацію, що може бути Третій спосіб передбачає передачу до МТ дооброблена вузлом цифрової обробки і використапоміжної інформації, яка вказує, на якій частоті МТ на для проведення пошуку пілот-сигналу у мережі має вести пошук носія GPS. Більшість приймачів безпровідного зв'язку. У іншому втіленні винахід GPS використовують так званий альманах супутдає пристрій для виконання пошуку пілот-сигналу. ників GPS, призначений мінімізувати для приймаУ одному з втілень цей пристрій включає щонайча пошук у частотній і просторовій областях від менше одну БС, причому кожна БС передає пілотвидимого супутника. Альманах містить 15000сигнал і використовується для визначення місцебітовий блок приблизних ефемерид і дані часової положення МТ у мережі зв'язку. Пристрій може моделі для всього сузір'я супутників. Дані альматакож включати щонайменше один МТ, який піднаха, що стосуються положення супутників і пототримує зв'язок з щонайменше однією БС і викоричного часу, є приблизними. Без альманаха для стовує передані до нього розміри вікна пошуку і знаходження сигналу супутника приймач GPS має інші параметри пошуку для мінімізації тривалості виконувати найширший можливий частотний попошуку всі х пілот-сигналів, пов'язаних з обраною шук. Для знаходження інших суп утників необхідно групою пілот-сигналів. виконувати додаткову обробку допоміжної інфорВинахід надає ряд переваг. Однією з них є те, мації. Такий пошук може тривати кілька хвилин, що тривалість пошуку групи пілот-сигналів знижуоскільки кількість частотних смуг є дуже великою. ється з використанням вже відомих способів. ІнКожна частотна смуга характеризується центральшою перевагою є відсутність невиправданих виною частотою і шириною. Наявність альманаха трат ресурсів пошукового пристрою, що знижує невизначеність доплерівського зсуву супузумовлюється більш високою ефективністю пошутника і, отже, кількість частотних смуг, що мають ку. Винахід надає і інші переваги, наведені у подабути проглянуті. С упутниковий альманах можна льшому описі. одержати з навігаційного повідомлення GPS або з Особливості, об'єкти і переваги винаходу можінформаційного або службового повідомлення, на краще уяснити з наведеного далі детального надісланого від супутника до МТ. Прийнявши цю опису з посиланнями на креслення, у яких: інформацію, МТ обробляє сигнал GPS для визнафіг.1 - суміжні комірки безпровідної системи чення власного місцеположення. зв'язку згідно з винаходом, Існує потреба у способі і пристрої для викорифіг.2а - пристрій безпровідного зв'язку, який стання інформації про місцеположення разом з використовує супутникову систему визначення процедурою пошуку пілот-сигналу для прискоренмісцеположення згідно з винаходом, ня у МТ пошуку всі х пілот-сигналів на призначеній фіг.2b - безпровідна система зв'язку згідно з частоті, коли МТ контролює інформаційний канал. винаходом, Винахід передбачає використання інформації про фіг.3 - блок-схема МТ згідно з винаходом і фізичне місцеположення МТ для визначення розФіг.2а-4 ілюструють різні втілення способу і міру вікна пошуку кожного з пілот-сигналів Сусідпристрою згідно з винаходом. Для спрощення поської і Кандидатської груп. Бажано не покладатись яснень (але без обмежень винаходу) вважається, на знання не лише точного місцеположення мобіщо ці втілення реалізуються у пристроях цифрової льного пристрою, але використовувати приблизне обробки сигналів, здатних виконувати послідовзнання місцеположення. ність інструкцій, придатних для машинного зчитуВзагалі винахід стосується мереж зв'язку, зоквання і виконання взаємозв'язаними компонентарема, способу і пристрою, які дозволяють викорисми згаданого обладнання. Наведений далі опис тати інформацію про місцеположення МТ для видасть змогу фахівцю реалізувати різні варіанти значення розміру вікна пошуку пілот-сигналів цих цифрови х пристроїв обробки. Сусідської, Активної і Кандидатської груп. Для фоЗгадані вище патенти і документи містять опис рмування Повідомлення Оновлення Списку Сусіпілот-сигналу, що використовується для одержандів, Розширеного Повідомлення Оновлення Списня доступу до системи, зокрема, для забезпечення ку Сусідів, Розширеного Повідомлення про швидкого доступ у МТ до локальної БС. МТ одерНапрямок Передачі зв'язку і Повідомлення з Виможує синхронізаційну інформацію, включаючи фагою Пошуку Частоти-кандидата може бути викоризовий зсув ПШ коду і інформацію про відносну стане місцеположення мобільного пристрою. потужність сигналу, від носія пілот-сигналу у пілоОдне з втілень винаходу дає спосіб виконання тному каналі. Після отримання пілот-сигналу МТ пошуку пілот-сигналу у мережі без-провідного зв'яможе одержати доступ до синхроканалу, пов'язазку. Спочатку визначається місцеположення МТ у ного з пілот-каналом, який використовується для мережі, після чого воно використовується для фоуточнення пов'язаних з часом інструкцій і забезпермування Повідомлення з Списком Сусідів, Розчує тимчасову синхронізацію внутрішніх схем МТ з ширеного Повідомлення з Списком Сусідів і Загасистемним часом. З викладеного вище зрозуміло, льного Повідомлення з Списком Сусідів. Це що синхронізація внутрішнього часу МТ з систем 9 71022 10 ним є дуже важливою. Це дозволяє МТ знати, де також репрезентована еліпсами, квадратами і знаходиться ПШ кодова послідовність БС і уможпрямокутниками. ливлює встановлення зв'язку між БС і МТ. ВідповіКрім того, якщо мобільний пристрій знаходитьдно, коли такій зв'язок встановлено, БС передає ся у пункті С, вікно пошуку ПШ1 може бути зменсистемний час до МС для здійснення синхронізашене у 3R/4r разів, де R - радіус комірки, а r - радіції. ус області невизначеності. У одному з втілень це У системах зв'язку широкого спектра пілотдосягається використанням фізичного місцеполосигнал використовується для синхронізації МС з ження МТ для секціонування розміру вікна пошуку. передачами від БС за фазою і частотою. У типоУ іншому втіленні місцеположення використовувому втіленні система зв'язку є системою з розшиється для секціонування всіх параметрів пошуку. реним спектром прямої послідовності. Приклади Згідно з цим способом, має бути відоме притакої системи можна знайти у патентах США близне місцеположення МТ. Його можна визначи5056109 і 5103459, включених посиланням. У систи різними відомими шляхами, згаданими вище темі зв'язку з розширеним спектром прямої послі(див. заявку на патент США 09/040501, від довності сигнали при передачі поширюються на 7/03/1990, включену посиланням). Винахід не вичастотну смугу, ширшу за мінімально необхідну магає точного визначення місцеположення і придля передачі інформації, модуляцією частотипускає наближені методи. носія сигналом даних і потім ще одною модуляціПісля того, як МТ одержить контроль над інєю результуючого сигналу широкосмуговим розформаційним каналом, БС, що забезпечує зв'язок, ширюючим сигналом. У одному з втілень пілотзаповнює поля Повідомлення Оновлення Списку сигнал можна розглядати як послідовність з одних Сусідів, Розширеного Повідомлення Оновлення лише одиниць. Розширюючий сигнал звичайно Списку Сусідів, Розширеного Повідомлення про генерується зсувним регістром з лінійним зворотНапрямок Передачі зв'язку і Повідомлення з Вимоним зв'язком, описаним у згаданих патентах. Розгою Пошук у Частоти-кандидата згідно з місцепоширюючий сигнал може розглядатись як фазоположенням МС. Ці поля містять список сусідніх півертальний фактор, який має вигляд лот-сигналів і пов'язані з ними розміри вікна пошуку. s(t)=Αe-w t+y Для встановлення зв'язку з БС МТ має синРозміри вікон пошуку визначаються з урахуванням місцеположення МТ у комірці. Зменшення хронізуватись з прийнятими сигналами як за фарозміру вікна пошуку знижує витрати на демодузою y, так і за частотою w. Пошуковий пристрій ляцію і прискорює завершення пошуку. знаходить фазу y розширюючого сигналу, після Вікно пошуку пошукового пристрою має щочого частоту знаходить демодуляційний елемент, найменше два компоненти, один з яких стосується пристосований для стеження за фазою і частотою. геометричної відстані між телефоном і джерелом Спосіб визначення фази прийнятого сигналу поляпілот-сигналу, а другий пов'язаний з впливом багає у перевірці гіпотез про фазу, узгоджених з вікгатошляховості на переданий пілот-сигнал. Об'єдном пошуку, і визначенні найбільш придатної з нання впливів цих компонентів мінімізує розмір них, яку називають також гіпотезою про зсув. Привікна пошуку. У системах ПДКУ просторової або клади пошуку з використанням "вікна" можна знайшляхової диверсифікації досягають влаштуванням ти у патенті США 5805648, включеному посиланкількох одночасних шляхів проходження сигналу ням. від МТ через дві або більше коміркових БС. Крім Для передачі зв'язку безпровідна система витого, шля хової диверсифікації можна досягти, використовує так званий "щілинний" пошук, тобто користовуючи багатошляхове довкілля і роздільну пошук у призначених періодичних вікнах ("щілиобробку сигналів, що надійшли з різними затримнах") інших БС, до яких може бути переданий зв'яками. Приклади такої диверсифікації можна знайти зок. Відповідно, МТ веде пошук сигналів пілоту патента х США 5101501 і 5109390, включених каналу, що передаються оточуючими БС у зумовпосиланням. леному вікні, центрованому навколо місця кодової У іншому втіленні параметри пошуку також ПШ послідовності, де МТ сподівається знайти піможуть бути обрані, базуючись на місцеположенні лот-канал згідно з зазначеними вище вимогами МТ. Коли МТ контролює інформаційний канал, БС стандарту. передає до нього пошуковий список і параметри БС, з якою МТ має поточний зв'язок, може пошуку. Ці параметри використовують знання міснадсилати до МТ розмір вікна пошуку і інші парацеположення МТ для секціонування або індивідуметри, наприклад, системний час. Зрозуміло, що алізованої адаптації параметрів пошуку. Таке секдля скорочення часу пошуку це вікно пошуку має ціонування використовується для оптимізації бути якомога меншим, але достатньо великим з процедури пошуку. Оптимізація вікна пошуку і поогляду на типові відхилення внутрішнього годиншукових процедур пошукового вузла прискорює ника. Крім того, параметри пошуку мають бути пошук. секціоновані. У ще одному втіленні, після визначення пошуТипове втілення винаходу дозволяє скоротити кового списку і розміру вікна згідно з географією розмір вікна пошуку для ПШ1 (фіг.1) на третину комірки, ці розміри, а також параметри процедури порівняно з існуючими стандартними способами. пошуку зберігаються у пам'яті. Оскільки комірки Якщо відомо, що МС знаходиться у крузі радіуса r, безпровідної системи можна вважати незмінними, пошук можна зосередити навколо d1-d2 з діапазоці розміри вікон можуть бути передані до МТ, що ном пошуку 2r. Звичайно r=100м. У цьому прикладі знаходиться у цій зоні, і використані ним. КБС, круг відповідає області "невизначеності положенбазуючись на знанні місцеположення МТ, може ня" мобільного пристрою. Така область може бути 11 71022 12 зчитати з пам'яті розмір вікна і/або параметри якщо перша БС належить до системи ПДКУ, що процедури і передати їх до МТ. У іншому втіленні працює у першому діапазоні частот, а друга БС цю інформацію може зберігати МТ. належить до системи ПДКУ, що працює у др угому Далі розглядаються різні апаратні втілення сидіапазоні частот, віддалена станція не може одностеми визначення місцеположення МТ. Зрозуміло, часно підтримувати зв'язок з обома БС, оскільки що для цього можуть бути використані різні систебільшість віддалених станцій не можуть одночасно ми. настроюватись на дві різні частотні смуги. Коли МТ Фіг.2а містить схему використання БС 202 і МТ 236 переходить з першої комірки 230 у другу комі204 у синхронній мережі зв'язку ПДКУ. Мережа рку 234, зв'язок 238 з першою БС 228 припиняєтьоточена будинками 206 і наземними перепонами ся, а новий зв'язок з другою БС 232 встановлюєть208. БС 202 і МТ 204 знаходяться у зоні обслугося. вування GPS, яка має кілька супутників, чотири з Фіг.3 ілюструє МТ 300, який має безпровідний яких позначені 210, 212, 214, 216. Така взаємодія з зв'язок з БС 302 безпровідної системи зв'язку 304. GPS добре відома (див., наприклад, HoffmannЗрозуміло, що система 304 може включати і інші Wellendorf В. et al., GPS Theory and Practice (ТеоБТ і БС (не показані). У типовому втіленні, щоб рія і практика GPS), 2-nd Ed., New York, NY: відрізняти сигнали одного МТ від сигналів іншого, Springer-Verlag Wien, 1993). При типовому викоривикористовуються принципи ПДКУ, описані у патестанні GPS потрібні щонайменше чотири супутнинті США 4901307, включеному посиланням. МТ ки, щоб приймач міг визначити своє місцеполо300 включає приймач/передавач 306, який може ження. На відміну від цього положення віддаленої підтримувати зв'язок з БС 302 через безпровідний станції 204 може бути визначене за допомогою зв'язок 308. Крім того, МТ 300 включає схему керусигналів від лише одного супутника GPS і, у найвання для керування прийомом і передачею даних простішому випадку, дво х інши х сигналів від назеприймачем/передавачем 306, виконану у вигляді много джерела. процесора 310 цифрових сигналів. Процесор 310 Фіг.2b містить блок-схему мережі 220 ПДКУ, має доступ до пристрою 312 зберігання даних. БС яка включає комутатор МТ (КМТ) 222 з контроле302 може також мати обладнання для обробки і ром БС (КБС) 224. Комунальна комутаторна телезберігання цифрових даних. Пристрій 312 зберіфонна мережа (ККТМ) 226 спрямовує виклики від гання даних містить інструкції, які виконує процезвичайних телефонів і інших мереж (не показаних) сор 310. Бажано, щоб МТ був подібним до звичайдо і від КМТ 222, який спрямовує виклики від ККТМ ного МТ системи ПДКУ, за винятком логічної 226 до і від первісної БС 228 першої комірки 230 і структури пристрою 312 зберігання даних. МТ 300 нової БС 232 другої комірки 234. Крім того, КМТ має внутрішній годинник 314, який у одному з вті222 спрямовує виклики між БС 228 і 232. Первісна лень є генератором на кристалі з контролем наБС спрямовує виклики до першого МТ 238 у перпруги і температури. Винахід включає також і інші шій комірці 230 через перший шлях зв'язку 238, типи годинників на кристалі або без нього. Вихідякий є двостороннім і включає прямий і зворотний ним сигналом годинника 314 є послідовність такканали зв'язку. Коли БС 238 встановлює зв'язок з тових імпульсів, що надсилаються до лічильника. МТ 236, прямий канал включає інформаційний Частота тактових імпульсів контролюється через канал зв'язку. контроль напруги вхідного сигналу до годинника Функція радіопозиціонування (ФРП) 242 пока314 від джерела 318 живлення згідно з відомими зана з'єднаною з КБС 224, але може бути пов'язаметодами. Годинник 314 може бути синхронізована прямо або непрямо з іншими компонентами ний з системним часом прийомом від БС повідоммережі, наприклад, КМТ 222. ФРП 242 звичайно лення з часовими параметрами, як це було описавключає цифрову обробку, зберігання і інші функно вище. ції (не показані) звичайно притаманні таким приОписані вище можуть бути застосовані, напристроям. ФРП 242 знаходить багато застосувань, клад, у пристрої обробки цифрового сигналу, зданаприклад, оцінювання затримки на проходження тному виконувати послідовність придатних для сигналу в один бік між БС 228 і МТ 226 або монітозчитування інструкцій. Ці інструкції можуть знахоринг і визначення часового зсуву між еталонним дитись на носіях інформації різних типів. Отже, часом і часом надходження сигналу. одним з об'єктів винаходу є виріб, який включає Хоча кожна з БС 228, 232 підтримує зв'язок носій інформації з програмою, що складається з лише у одній комірці, КБС часто керує БС кількох придатних для машинного зчитування інструкцій, комірок або має з ними зв'язок. Коли МТ 236 перепридатних для виконання пристроєм обробки циходить з першої комірки 230 у другу комірку 234, фрового сигналу, призначеним для реалізації сповін встановлює зв'язок з БС другої комірки. Це собу прискорення пошуку пілот-сигналу. звичайно називають "передачею зв'язку" до другої Носій інформації для цифрових сигналів може БС 232. При "м'якій передачі зв'язку" МТ 236 вставключати, наприклад, пам'ять з довільним достуновлює новий зв'язок 244 з другою БС 232 на допом (RAM) або ASIC (не показані), що входять у даток до першого зв'язку 238 з першою БС 228. склад мережі зв'язку. Інструкції можуть також збеПісля переходу МТ 236 у др угу комірку 234 і встарігатись на іншому носії, наприклад, на магнітному новлення каналів зв'язку з другою коміркою відданосії, прямо або непрямо доступному для прилена станція може припинити перший зв'язок 238. строю обробки цифрового сигналу. У ілюстративПри жорсткій передачі зв'язку внаслідок значному втіленні винаходу інструкції можуть бути рядної різниці між першою і другою БС 228, 232 зв'яками компільованого комп'ютерного коду, зок з першою БС має бути перерваний перед наприклад, С+, C++ або JAVA або іншої мови ковстановленням зв'язку з другою БС. Наприклад, дування, відомої фахівцям. 13 71022 14 Наведений вище опис бажаних втілень дозвоцепціями і принципами винаходу. Об'єм винаходу лить будь-якому фа хівцю використати винахід, не обмежується наведеними втіленнями і визназробивши належні модифікації і зміни згідно з кончається новими принципами і ознаками. Комп’ютерна в ерстка О. Гапоненко Підписне Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for searching pilot signals in a wireless communication system
Назва патенту російськоюСпособ и устройство для поиска управляющих сигналов в системе беспроводной связи
Автори російськоюSoliman, Samir, S.
МПК / Мітки
МПК: H04B 1/707, H04Q 7/38
Мітки: зв'язку, пристрій, безпровідного, пілот-сигналу, пошуку, системі, спосіб
Код посилання
<a href="https://ua.patents.su/7-71022-sposib-ta-pristrijj-poshuku-pilot-signalu-u-sistemi-bezprovidnogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій пошуку пілот-сигналу у системі безпровідного зв’язку</a>
Спосіб створення допоміжного пілот-сигналу, спосіб його прийому і пристрій для його здійснення та спосіб індивідуальної передачі
Номер патенту: 63963
Опубліковано: 16.02.2004
Автори: Оденвалдер Джозеф П., Тідеманн Едвард Г., мол., Ландбі Стайн А.
МПК: H04J 11/00, H04B 7/26, H04B 1/707
Мітки: допоміжного, індивідуальної, здійснення, спосіб, пристрій, передачі, створення, пілот-сигналу, прийому
Формула / Реферат:
1. Спосіб створення допоміжного пілот-сигналу, який передбачає операції: прийому пілотних даних і покриття зазначених пілотних даних пілотною послідовністю Уолша, яку утворюють конкатенацією основної послідовності Уолша і її комплементарної послідовності.2. Спосіб за п. 1, який відрізняється тим, що зазначена основна послідовність Уолша є послідовністю нулів.3. Спосіб за п. 1, який відрізняється тим, що зазначена основна...
Спосіб і пристрій визначення робочої сітки частот системи звязку із стрибкоподібною зміною частоти
Номер патенту: 63931
Опубліковано: 16.02.2004
Автор: Сорочан Анатолій Григорович
МПК: G01R 23/00
Мітки: пристрій, робочої, частоти, зміною, частот, стрибкоподібною, спосіб, зв'язку, визначення, системі, сітки
Формула / Реферат:
1.Спосіб визначення робочої сітки частот системи зв’язку із стрибкоподібною зміною частоти, який ґрунтується на тому, що вхідний сигнал із стрибкоподібно змінюваною робочою частотою Wс, яка знаходиться в діапазоні частот DW, розгалужують на три частини, в першій частині сигнал зміщують по частоті на частоту гетеродину Wг1 і затримують на сталу часу t01, одержаний сигнал перемножують з другою частиною сигналу, після чого на частоті Wг1...
Пристрій для пошуку екстремумів сигналу
Номер патенту: 14413
Опубліковано: 25.04.1997
Автор: Багацький Валентин Олексійович
МПК: G05B 13/02
Мітки: пошуку, пристрій, екстремумів, сигналу
Формула / Реферат:
Устройство для поиска экстремумов сигнала, содержащее блок сравнения, регистр максимума, регистр минимума, блок памяти, генератор импульсов и двухразрядный сдвиговый регистр, причем к второму входу блока сравнения подсоединен уравновешивающий выход блока памяти, выходы блока сравнения соединены с первыми входами блока памяти и с входами сдвигового регистра, выход генератора импульсов соединен с вторым входом блока памяти, отличающееся...
Спосіб відновлення кольорорізницевого сигналу при декодуванні у системі секам та пристрій для його здійснення
Номер патенту: 24053
Опубліковано: 31.08.1998
Автори: Крюкова Тетяна Дмитрівна, Медвєдев Юрій Андрійович, Матвеєв Олександр Олександрович, Басій Валерій Тимофійович, Сташків Юрій Володимирович, Солоп Микола Опанасович, Горьєв Сергій Адольфович, Плотников Валерій Михайлович, Гофайзен Олег Вікторович
МПК: H04N 9/66
Мітки: відновлення, кольорорізницевого, системі, сигналу, пристрій, здійснення, спосіб, секам, декодуванні
Формула / Реферат:
1. Способ восстановления цветоразностного сигнала при декодировании в системе СЕКАМ, по которому из полного цветового телевизионного сигнала выделяют цветовую поднесущую, осуществляют демодуляцию и коррекцию низкочастотных (НЧ) предыскажений цветоразностного сигнала, отличающийся тем, что перед коррекцией НЧ предыскажений генерируют зависящие от полярности цветоразностного сигнала сигналы So и S*, по абсолютной величине занимающие...
Пристрій та спосіб приймання цифрового сигналу в системі багаторазового доступу з часовим розділенням
Номер патенту: 27769
Опубліковано: 16.10.2000
Автори: Бейкер Джеймс Д., Казекі Генрі Л.
Мітки: розділенням, пристрій, сигналу, доступу, часовим, системі, приймання, спосіб, багаторазового, цифрового
Текст:
...символ на линии 216, формируется когерентным детектором 215 путем комбинирования скорректированного сигнала на линии 212 и фазового эталонного сигнала на линии 218 от комплексного коррелятора 235. Когерентные детекторы обычно используются в цифровой связи для восстановления символов. Процесс когерентного детектирования описан в публикации Бернарда Скляра "Цифровая связь, фундаментальные основы и применения", глава 3,1988. Микро-ЭВМ 217...