Пристрій для заглиблення гвинтових паль
Формула / Реферат
Пристрій для заглиблення гвинтових паль, що містить електрокабестан, у шпинделі якого закріплена паля з гвинтовою лопаттю, яка має можливість осьового переміщення відносно стовбура палі, механізм осьових коливань шпинделя разом зі стовбуром, який відрізняється тим, що механізм осьових коливань шпинделя разом зі стовбуром являє собою конічний зубчастий диференціал, центральні колеса якого розташовано співвісно зі шпинделем, з яких ведуче колесо обертається незалежно від нього, отримуючи рух від коробки швидкостей електрокабестана, ведене колесо закріплено на шпинделі і рухається разом з ним, причому їх зубці нарізані на хвилястих конічних початкових поверхнях, а осі сателітів закріплені на водилі з можливістю поступального переміщення паралельно осі шпинделя, причому постійний контакт зубцевих поверхонь в зачепленнях забезпечено пружиною стиснення, а водило встановлено з можливістю повороту відносно шпинделя і фіксації.
Текст
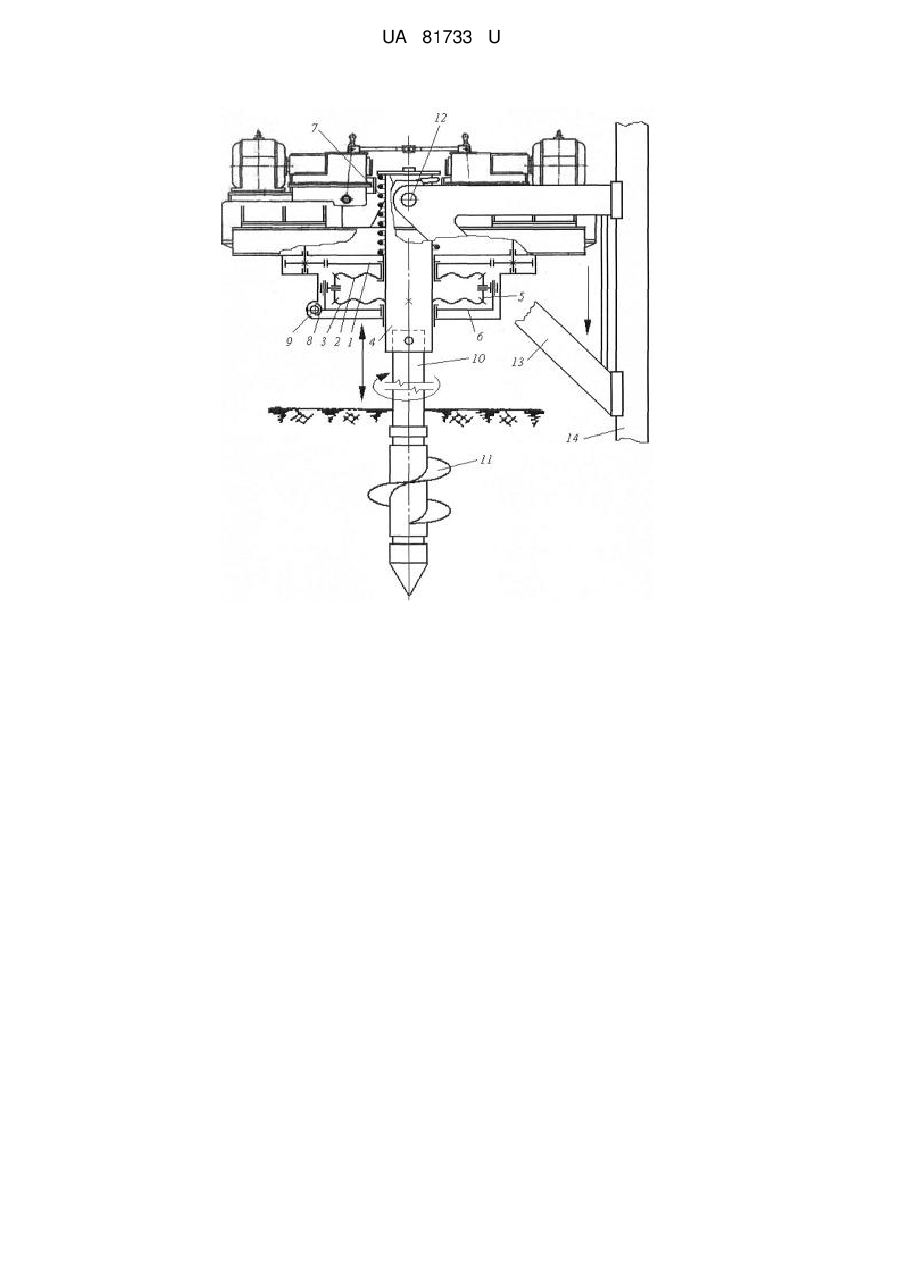
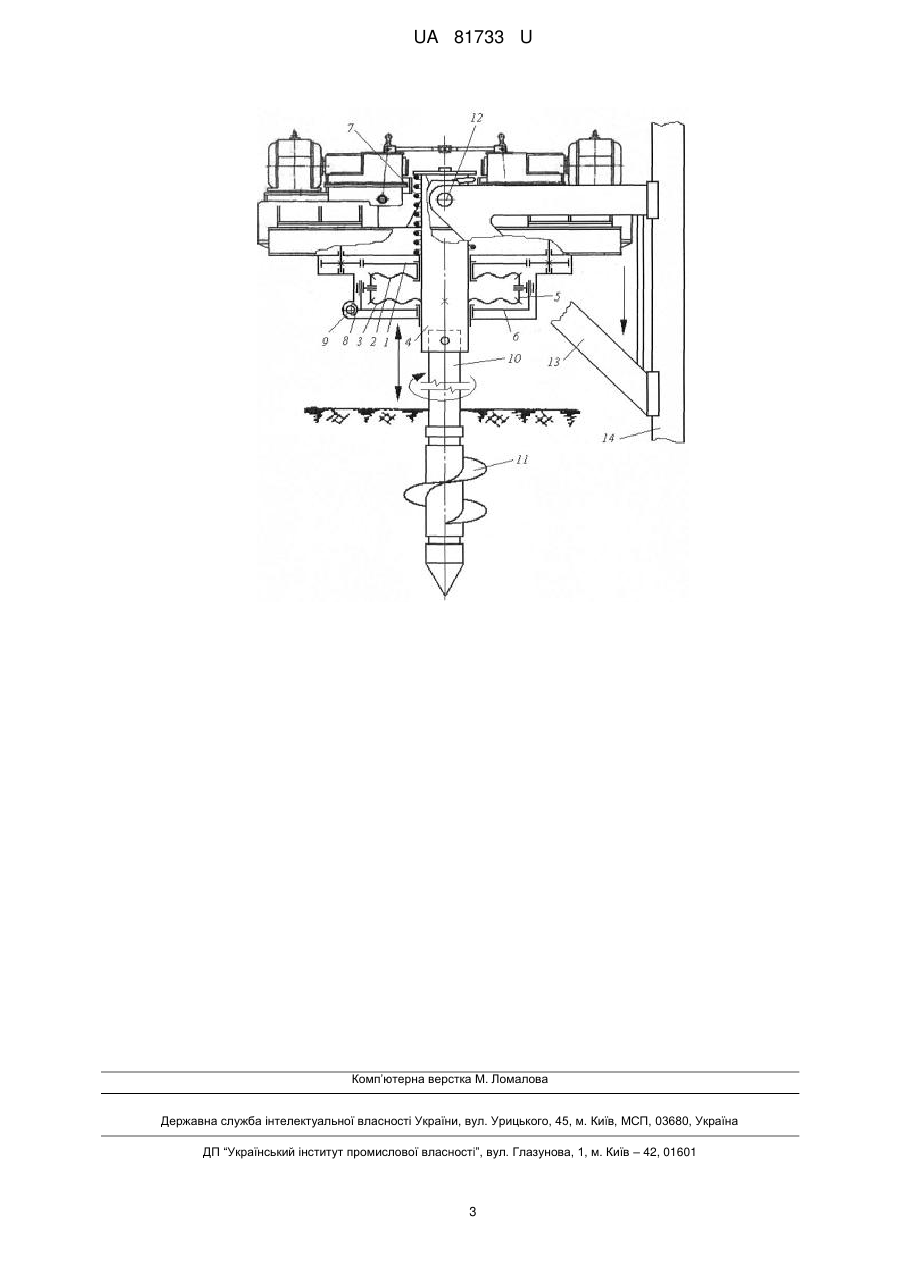
Реферат: UA 81733 U UA 81733 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі будівництва і може бути використана для заглиблення гвинтових паль, анкерів або інших конструкцій. Відомо пристрій для заглиблення гвинтових паль, який містить електрокабестан для обертання з механізмом осьових коливань шпинделя у вигляді вібромолота, де паля, що закріплюється у шпинделі, несе гвинтову лопать, яка має можливість осьового переміщення відносно стовбура палі, причому частоти обертання і осьових коливань шпинделя разом зі стовбуром палі можуть автоматично саморегулюватися в залежності від характеру ґрунту (див. авт. св. СРСР № 896184, кл. E02D 7/22, E02D 7/26, опубл. 07.01.82, бюл. № 1, 1982). Недоліком відомої конструкції є наявність окремого двигуна для вібромолота і неможливість регулювання амплітуди осьових коливань. В основу корисної моделі поставлена задача удосконалення пристрою для заглиблення гвинтових паль шляхом розміщення в ньому іншого механізму осьових коливань стовбура палі з можливістю простого регулювання амплітуди цих коливань без зупинки технологічного процесу. Поставлена задача вирішується тим, що у пристрої для заглиблення гвинтових паль, що містить електрокабестан, у шпинделі якого закріплюється паля з гвинтовою лопаттю, яка окрім обертанням разом з палею має можливість осьового переміщення відносно стовбура палі, згідно з корисною моделлю, встановлено механізм осьових коливань шпинделя разом зі стовбуром палі у вигляді конічного зубчастого диференціалу, центральні колеса якого розташовано співвісно зі шпинделем, з яких ведуче колесо обертається незалежно від нього, отримуючи рух від коробки швидкостей електрокабестана, а ведене колесо закріплено на шпинделі і рухається разом з ним. Зубці центральних коліс нарізані на хвилястих конічних початкових поверхнях, а осі сателітів закріплені на водилі з можливістю поступального переміщення паралельно осі шпинделя, причому постійний контакт зубцевих поверхонь в зачепленнях забезпечено пружиною стиснення, а водило встановлено з можливістю повороту відносно шпинделя і фіксації. Технічна суть та принцип дії запропонованої корисної моделі пояснюються кресленням, де зображена схема пристрою для заглиблення гвинтових паль, що містить електрокабестан, наприклад з двома електродвигунами, які за допомогою двох однакових коробок швидкостей надають з двох боків обертання циліндричному зубчастому колесу 1, що зблоковано з конічним колесом 2, одним з центральних коліс конічного зубчастого диференціалу - механізму осьових коливань. Інше його центральне колесо 3 закріплено на шпинделі 4. До складу механізму осьових коливань входять також сателіти 5, водило 6, пружина стиснення 7, сектор 8 черв'ячного колеса черв'ячної передачи, що закріплений на водилі 6. Шпиндель 4 має можливість осьового руху відносно блоку коліс 1, 2 і водила 6. Щоб здійснити цю можливість, зубці центральних коліс 2 і 3 нарізані на конічних хвилястих початкових поверхнях, а осі вхідних з цими колесами у зачеплення сателітів 5 можуть рухатися поступально відносно водила 6 і шпинделя 4 паралельно до осі останнього. Пружина стиснення 7 забезпечує силове замикання вищих кінематичних пар в зачепленнях конічного зубчастого диференціала, а сектор 8 черв'ячного колеса призначений повертати водило 6 на певний кут за допомогою черв'яка 9. Стовбур 10 гвинтової палі верхнім кінцем приєднується до шпинделя 4, а на нижньому його кінці встановлюється гвинтова лопать 11 з можливістю руху проміж верхнім і нижнім обмежувачами вздовж стовбура 10. Корпус електрокабестана поєднується цапфами 12 з рухомою кареткою 13 і спрямовуючими стрілами 14. Пристрій для заглиблення гвинтових паль функціонує наступним чином. У шпинделі 4, піднятого за допомогою каретки 13 по спрямовуючим стрілам 14 на необхідну висоту електрокабестана, закріплюється стовбур 10 палі з гвинтовою лопаттю 11. Після доторкання палі з ґрунтом вмикаються електродвигуни, і циліндричне зубчасте колесо 1, а разом з ним і центральне колесо 2 конічного диференціалу отримують обертальний рух, який перетворюється у циклічний гвинтовий рух шпинделя 4 за допомогою закріпленого на ньому другого центрального колеса 3. Додатковий до обертального осьовий коливальний рух, що вказаний на кресленні двоспрямованою стрілкою, виникає завдяки тому, що зубці центральних коліс 2 і 3 нарізані на конічних хвилястих початкових поверхнях, а осі вхідних з цими колесами у зачеплення сателітів 5 рухаються поступально відносно водила 6 і шпинделя 4 паралельно до осі останнього. Пружина 7 забезпечує постійний контакт зубцевих поверхонь центральних колес 2, 3 і сателітів 5. По мірі заглиблення наконечника стовбура 10 гвинтова лопать 11, що обертається разом з ним, відходить від нижнього обмежувача, не заглиблюючись у ґрунт, доки не дійде до верхнього обмежувача, який до цього її примусить. Далі гвинтова лопать 11 наздоганяє нижній обмежувач і, натискаючи на нього, тягне за собою стовбур 10 палі. Останній, здійснюючи разом зі шпинделем 4 окрім обертального також осьовий коливальний рух відносно гвинтової лопаті 11, своїм конусним наконечником торує їй шлях. 1 UA 81733 U 5 10 15 20 25 Амплітуда осьових коливань шпинделя 4 залежить від відносного розташування гребенів та западин на хвилястих поверхнях обох центральних коліс 2 і 3 у початковий момент і може регулюватись шляхом зміни цього розташування. Припустимо, форма початкових поверхонь кожного з центральних коліс 2 і 3 забезпечує відносне осьове переміщення за наступним законом: S A sinkt , де A - амплітуда коливань; k - кількість хвиль на колесі, що дорівнює кількості сателітів 5; - кутова швидкість; t - час. Тоді сумарне переміщення S центрального колеса 3 відносно стояка відбувається згідно із залежністю: S S52 S35 . Тут S 52 - переміщення осі сателіта 5 відносно центрального колеса 2 і S 35 - осьове переміщення центрального колеса 3 (разом зі шпинделем 4 та стовбуром 10 гвинтової палі) відносно сателіта 5. Після підстановки з урахуванням, що гребені хвилястих поверхонь центральних коліс 2 і 3 змушують сателіт 5 рухатись вздовж осі шпинделя 4 у протилежних напрямках, маємо: S A sin kt A sin kt , де - зсув за фазою процесів S5 S5 t і S35 S35 t . З отриманого виразу з урахуванням, що при нерухомому водилі 6 центральні колеса 2 і 3 конічного диференціала обертаються з однаковою за величиною кутовою швидкістю в різні боки, видно, що при 0 коливання мають найбільшу амплітуду 2A , а при / k вони відсутні. Повертаючи і фіксуючи водило 6 за допомогою черв'яка 9 черв'ячної передачі, сектор 8 черв'ячного колеса якої з водилом 6 зблокований, можна плавно змінювати фазовий кут , таким чином регулюючи амплітуду осьових коливань шпинделя 4 та стовбура 10 гвинтової палі в залежності від міцності ґрунту. Причому це можна робити навіть під час руху. Якщо це робиться у нерухомому стані, одне з центральних коліс треба загальмувати. 30 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Пристрій для заглиблення гвинтових паль, що містить електрокабестан, у шпинделі якого закріплена паля з гвинтовою лопаттю, яка має можливість осьового переміщення відносно стовбура палі, механізм осьових коливань шпинделя разом зі стовбуром, який відрізняється тим, що механізм осьових коливань шпинделя разом зі стовбуром являє собою конічний зубчастий диференціал, центральні колеса якого розташовано співвісно зі шпинделем, з яких ведуче колесо обертається незалежно від нього, отримуючи рух від коробки швидкостей електрокабестана, ведене колесо закріплено на шпинделі і рухається разом з ним, причому їх зубці нарізані на хвилястих конічних початкових поверхнях, а осі сателітів закріплені на водилі з можливістю поступального переміщення паралельно осі шпинделя, причому постійний контакт зубцевих поверхонь в зачепленнях забезпечено пружиною стиснення, а водило встановлено з можливістю повороту відносно шпинделя і фіксації. 2 UA 81733 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюEquipment for lowering screw piles
Автори англійськоюMalkov Valerii Mykolaiovych
Назва патенту російськоюУстройство для углубления винтовых свай
Автори російськоюМальков Валерий Николаевич
МПК / Мітки
МПК: E02D 7/22
Мітки: заглиблення, гвинтових, паль, пристрій
Код посилання
<a href="https://ua.patents.su/5-81733-pristrijj-dlya-zagliblennya-gvintovikh-pal.html" target="_blank" rel="follow" title="База патентів України">Пристрій для заглиблення гвинтових паль</a>
Спосіб заглиблення паль
Номер патенту: 33450
Опубліковано: 15.02.2001
Автори: Булатнікова Олена Анатоліевна, Кустенко Ігор Олексійович, Мішин Аркадій Володимирович, Давидюк Ганна Валентинівна
МПК: E02D 11/00
Мітки: спосіб, паль, заглиблення
Текст:
...і скидання паль застосо вується баштовий кран, що забезпечує піднімання паль на задану висоту, дозволяє зручно, дешево та продуктивно стабілізувати (з використанням стабілізатора положення падаючої палі ) , здійснювати прицільне (з використанням виска) скидання. Рішення цієї задачі досягається завдяки теоретичному роз рахунку глибини заглиблення палі в грунт експериментальної , перевірки теоретичних залежностей для глибини заглиблення...
Спосіб заглиблення паль
Номер патенту: 33451
Опубліковано: 15.02.2001
Автори: Мішин Аркадій Володимирович, Давидюк Ганна Валентинівна, Кустенко Ігор Олексійович, Булатнікова Олена Анатоліевна
МПК: E02D 11/00
Мітки: заглиблення, паль, спосіб
Текст:
...p продуктивно здійснювати прицільне скидання. Поставлене завдання вирішується тим» що у способі заглиблення паль при якому здійснюється піднімання та скидання паль відповідно з винаходом для піднімання та скидання паль застосовується аеростат з комплектом транспортних засобів, які забезпечують піднімання паль на задану висоту, контроль положення паль з землі геодезичними приладами, динстанційну отстро-півку паль. Рішення цієї задачі...
Установка для заглиблення паль
Номер патенту: 12860
Опубліковано: 15.03.2006
Автор: Вакуленко Юрій Миколайович
МПК: E02D 7/00
Мітки: заглиблення, паль, установка
Формула / Реферат:
Установка для заглиблення паль, яка складається з упорної конструкції, що своїми виступами та силовим елементом утримується за існуючий фундамент будівлі, що підсилюється, причому опорна конструкція виконана у вигляді порталів, опертих на стійки, силовий елемент виконаний у вигляді надувних оболонок, а між оболонками та палею, що підлягає заглибленню, розташована опорна балка, яка відрізняється тим, що на поверхні останньої розміщено...
Установка для заглиблення паль
Номер патенту: 12859
Опубліковано: 15.03.2006
Автор: Вакуленко Юрій Миколайович
МПК: E02D 7/00
Мітки: заглиблення, паль, установка
Формула / Реферат:
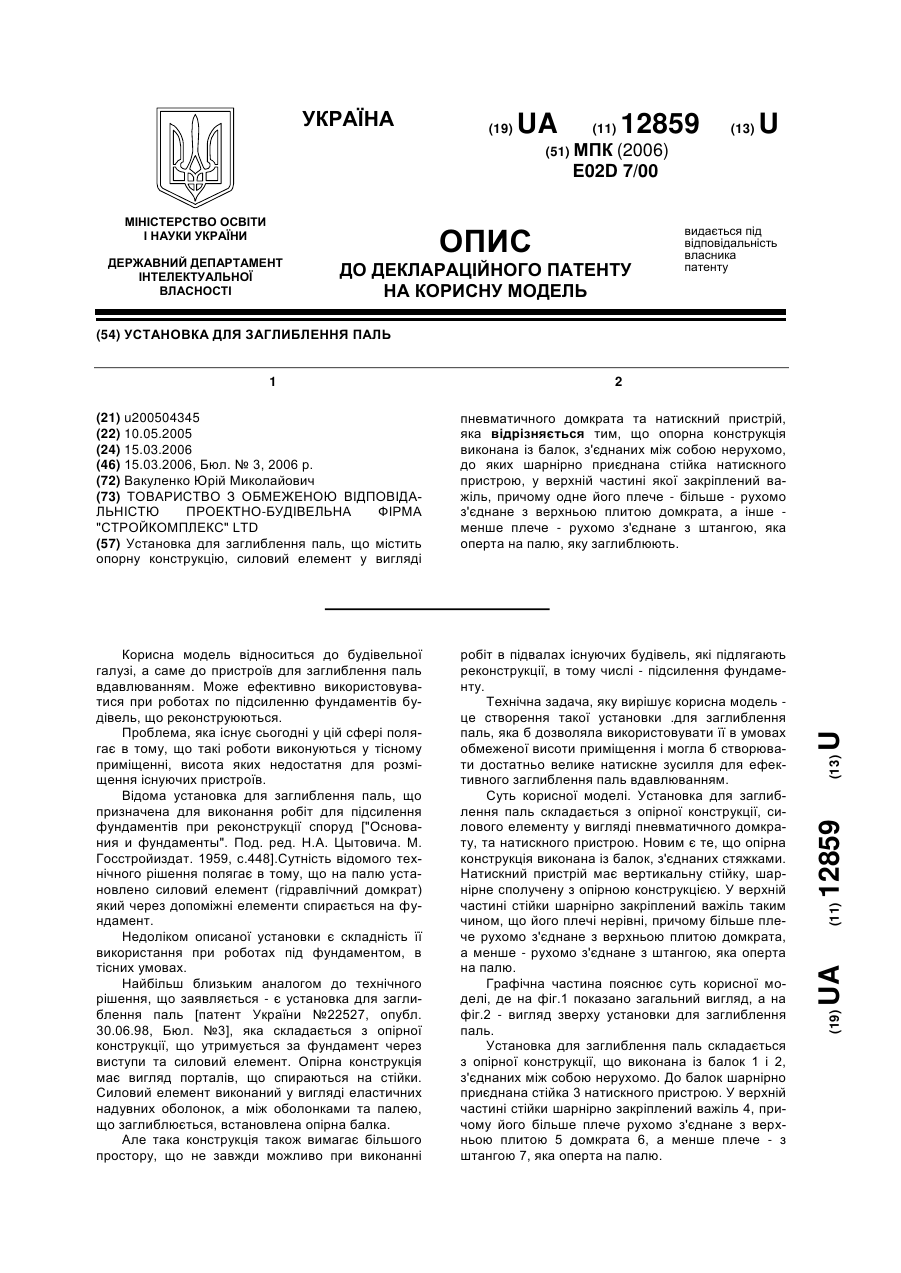
Установка для заглиблення паль, що містить опорну конструкцію, силовий елемент у вигляді пневматичного домкрата та натискний пристрій, яка відрізняється тим, що опорна конструкція виконана із балок, з'єднаних між собою нерухомо, до яких шарнірно приєднана стійка натискного пристрою, у верхній частині якої закріплений важіль, причому одне його плече - більше - рухомо з'єднане з верхньою плитою домкрата, а інше - менше плече - рухомо з'єднане з...
Спосіб формування наконечників гвинтових паль
Номер патенту: 73775
Опубліковано: 10.10.2012
Автори: Згода Денис Петрович, Кралін Андрій Костянтинович, Водолажченко Олександр Григорович
МПК: E02D 5/28
Мітки: паль, формування, спосіб, наконечників, гвинтових
Формула / Реферат:
Спосіб формування наконечників гвинтових паль, що при якому формують наконечник гвинтової палі і заготівку, який відрізняється тим, що формують наконечник гвинтових паль за рахунок пластичної деформації заготівки, яку локально нагрівають до необхідної температури в місці контакту з робочим інструментом, за рахунок сили тертя, створеною осьовою подачею і обертальним рухом заготівки відносно робочого інструмента і змінюють форму і геометричні...
Попередній патент: Буксовий повідець
Наступний патент: Ваговимірювальний датчик
Випадковий патент: Спосіб виробництва продуктів, які містять дисолі мурашиної кислоти, та сухі, вільноплинні і стійкі продукти, що містять дисолі мурашиної кислоти