Система підтримки прийняття рішень для локомотивних бригад
Номер патенту: 104608
Опубліковано: 10.02.2016
Автори: Бабанін Олександр Борисович, Рябко Костянтин Олександрович, Фомін Олексій Вікторович, Горобченко Олександр Миколайович
Формула / Реферат
Система підтримки прийняття рішень для локомотивних бригад, що містить людино-машинний інтерфейс, яка відрізняється тим, що до складу системи додатково введені база знань, підсистема керування базою знань, нейромережа оцінки складності нештатних ситуацій та підсистема оптимізації та прогнозування якості рішень, які використовують математичний апарат теорії штучного інтелекту та забезпечують прийняття рішень по керуванню локомотивом з урахуванням прогнозних значень безпеки руху, витрат енергії на керування поїздом на поточній ділянці, причому підсистема керування базою знань забезпечує доступ інших підсистем до бази знань, які сполучені між собою багатофункціональною поїзною шиною.
Текст
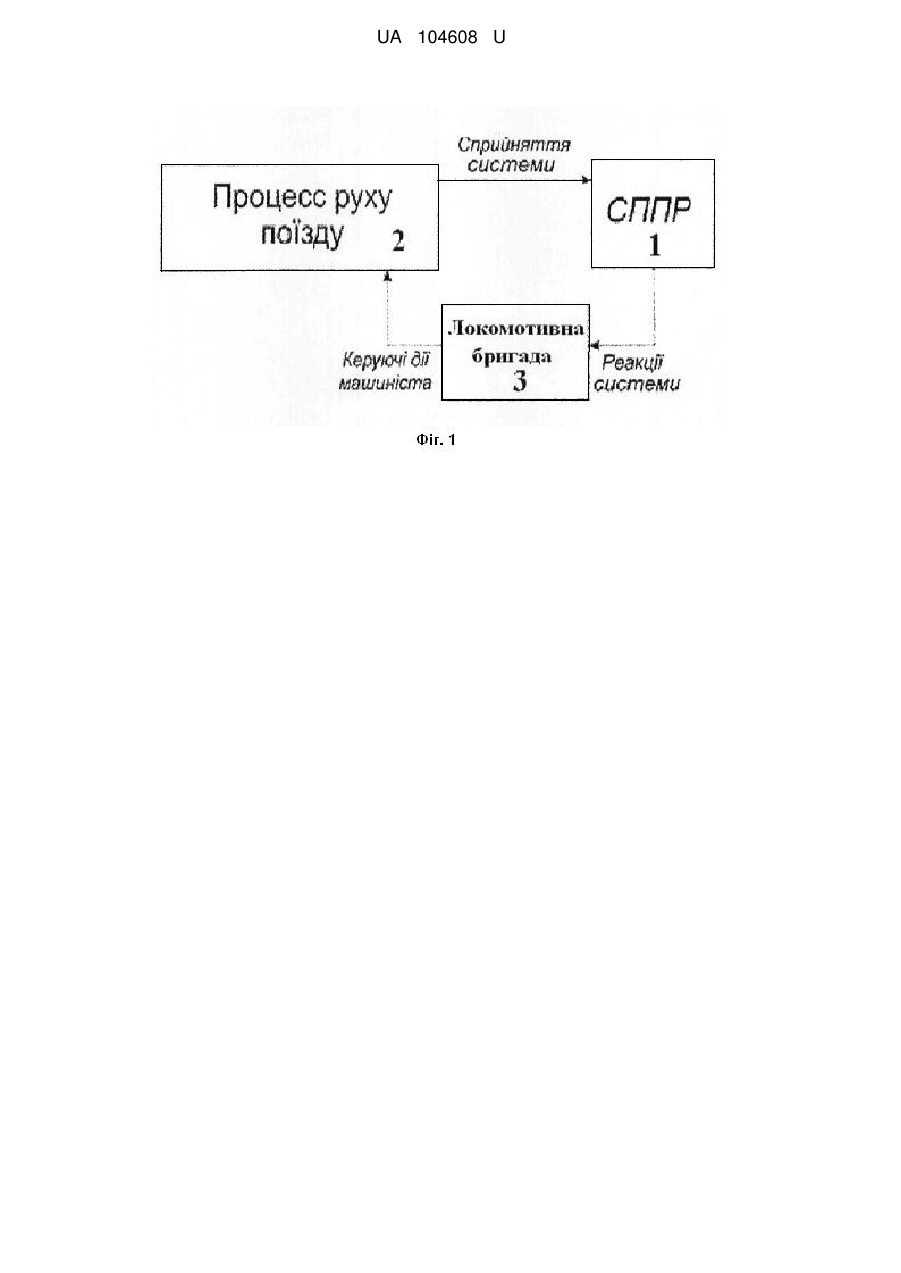
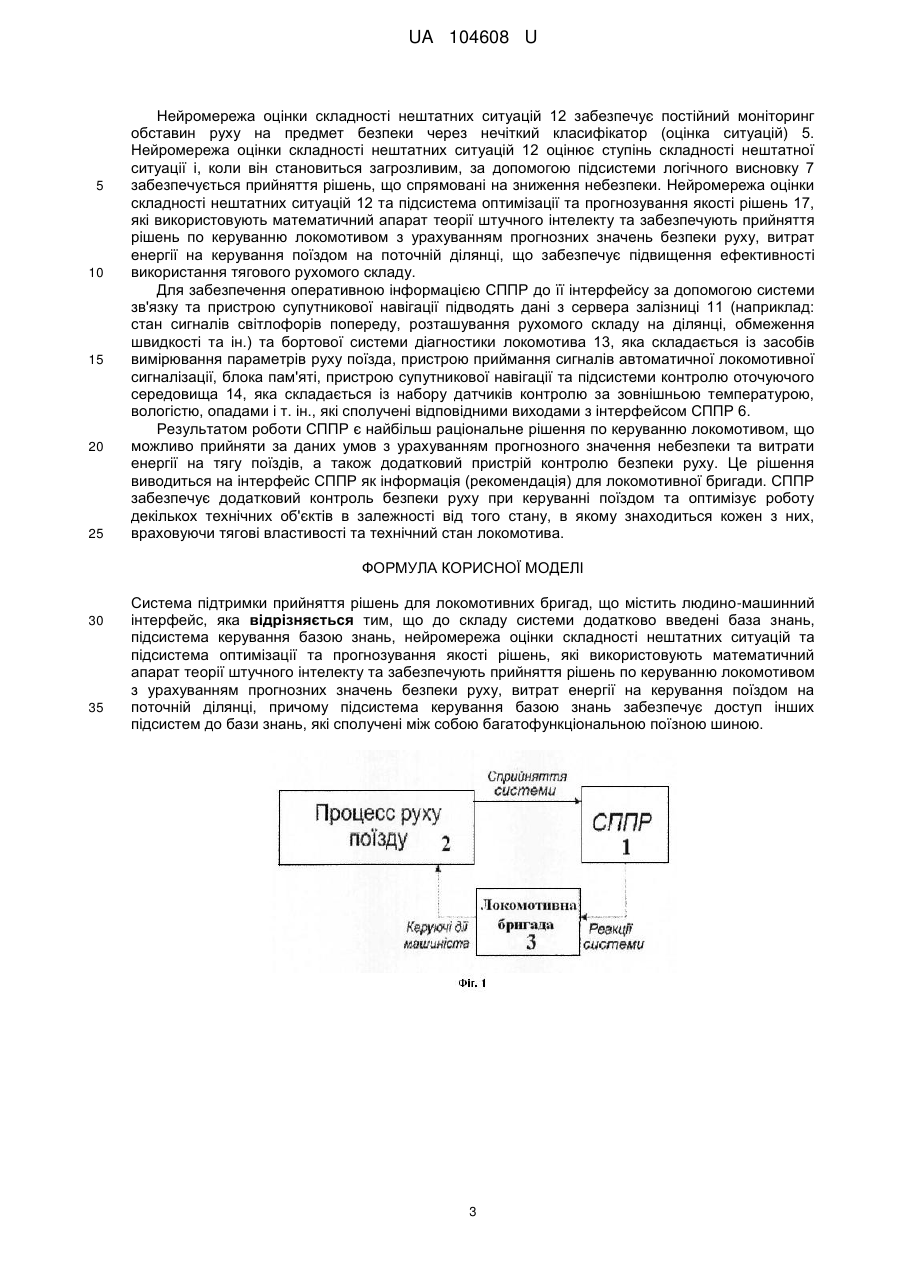
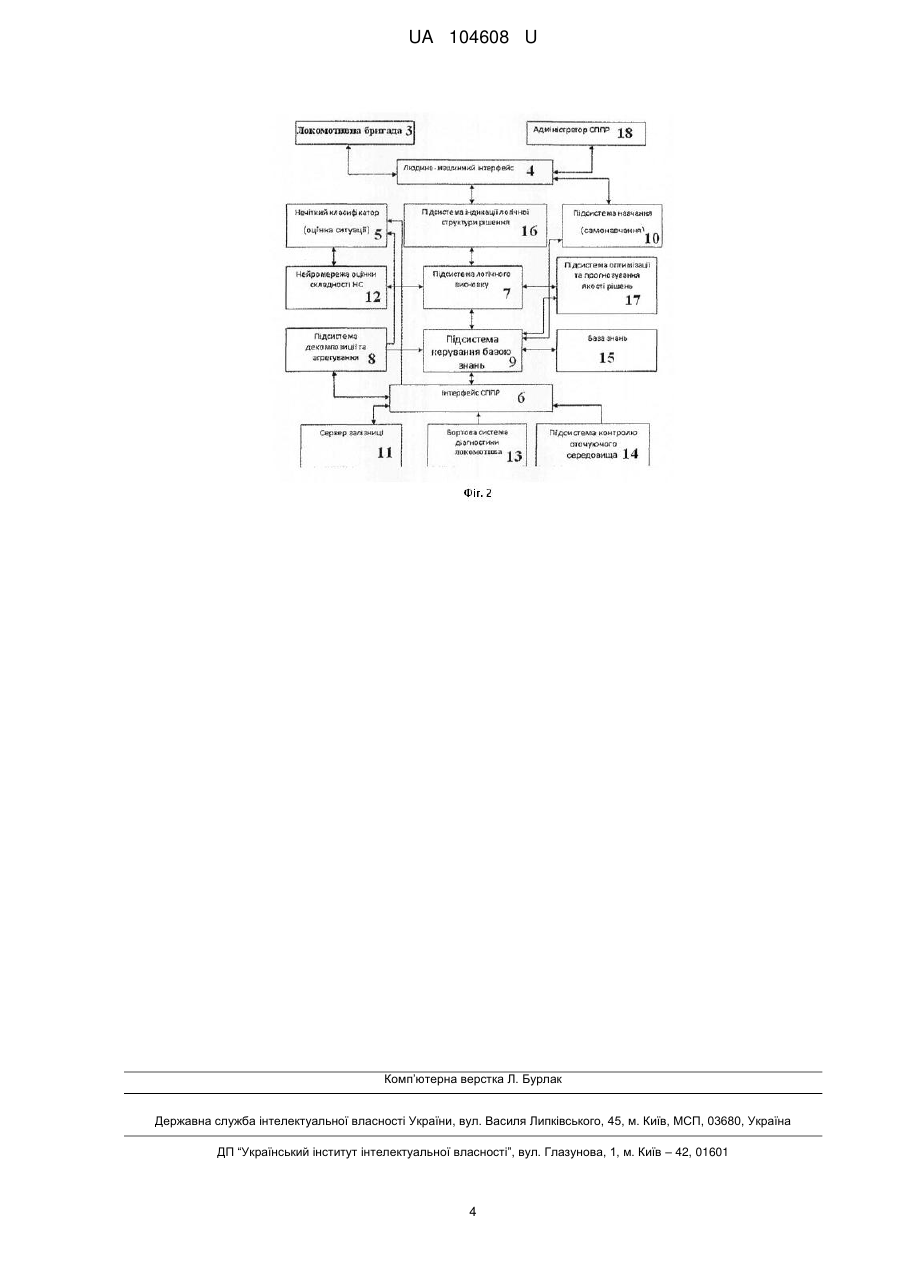
Реферат: Система підтримки прийняття рішень для локомотивних бригад містить людино-машинний інтерфейс. До складу системи додатково введені база знань, підсистема керування базою знань, нейромережа оцінки складності нештатних ситуацій та підсистема оптимізації та прогнозування якості рішень, які використовують математичний апарат теорії штучного інтелекту та забезпечують прийняття рішень по керуванню локомотивом з урахуванням прогнозних значень безпеки руху, витрат енергії на керування поїздом на поточній ділянці. Підсистема керування базою знань забезпечує доступ інших підсистем до бази знань, які сполучені між собою багатофункціональною поїзною шиною. UA 104608 U (12) UA 104608 U UA 104608 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до інформаційно-комунікаційних технологій у сфері управління тяговим рухомим складом залізниць. Система підтримки прийняття рішень (СППР) може бути застосована як пристрій підвищення ефективності дій локомотивних бригад при керуванні поїздом, а також як додатковий пристрій контролю безпеки руху. Відома підсистема підтримки прийняття рішень у складі системи автоматичного управління технологічними комплексами [UA30556U, від 25.02.2008 р., бюл. № 4, 2008 р. "Підсистема підтримки прийняття рішень для керування технологічними комплексами", автори Власенко Лідія Олександрівна (UA), Ладанюк Анатолій Петрович (UA), Іващук Вячеслав Віталійович (UA), МПК G05B 13/04], що містить в своєму складі блок прийняття рішень, базу знань, блок експертних оцінок, блок діагностики і прогнозування. Згідно з корисною моделлю, в режимі реального часу за допомогою блока діагностики та прогнозування діагностує стан параметрів системи, прогнозує можливі відхилення від заданого режиму та знаходить ідентичні ситуації в базі знань, а при відсутності подібних, за "допомогою проведення експертних оцінок, виробляє і пропонує можливі варіанти стану системи, на основі якого блок прийняття рішень виробляє корегуючі дії з подальшим занесенням їх до бази знань. Недоліками аналога є відсутність зв'язку з іншими системами, що виконують аналогічні задачі. Це не дозволяє оптимізувати роботу декількох технічних об'єктів в залежності від того стану, в якому знаходиться кожен з них. Відома система підтримки прийняття рішень для оперативно-диспетчерського персоналу сортувальної гірки [RU98387U1, від 28.04.2010 р "Система поддержки принятия решений для оперативно-диспетчерского и эксплуатационного персонала автоматизированной сортировочной горки", автори Мельников Анатолий Владимирович (RU), Муравский Александр Викторович (RU), Мухин Алексей Викторович (RU), Сачко Владимир Иванович (RU), Тартынский Валентин Анатольевич (RU), Шабельников Александр Ииколаевич (RU), МПК B61L17/00], що забезпечує покращене використання обладнання станції при виконанні розпускання вагонів з гірки. Ця система має достатню оперативність прийняття рішень, але зовсім не враховує тягові властивості та технічний стан локомотивів. Відома система для регулювання руху поїзду на перегоні [RU2548645C1, від 31.01.2014 р, "Система для регулирования движения поезда на перегоне", автори Воробьев Всеволод Владимирович (RU), Воронин Владимир Альбертович (RU), Норейко Ольга Владимировна (RU), Шеметов Сергей Викторович (RU), МПК B61L23/00], що складається як з бортових, так і з колійних пристроїв. Досягається підвищення безпеки руху за рахунок розширення функцій комплексного локомотивного пристрою безпеки шляхом введення модуля логічної обробки сигналів. Але робота системи спрямована лише на підвищення безпеки і ніяк не враховує покращення експлуатаційних показників рухомого складу. Найбільш близьким до запропонованої корисної моделі вибрано систему керування швидкісним пасажирським електропоїздом [UA29142U, від 10.01.2008 р. "Система керування швидкісним пасажирським електропоїздом", автори Гапановіч Валентін Александров (RU), Назаров Александр Станіславо (RU), Розенберг Єфім Наумовіч (RU), Ліпп Андреас (DE), Лутц Ханс-Юрген (DE), Зурм Міхаель (DE), МПК B60L 15/20], що містить інтерфейс та засоби вимірювання параметрів руху поїзда, пристрій приймання сигналів автоматичної локомотивної сигналізації, блок пам'яті, пристрій супутникової навігації. Недоліком цієї системи є те, що вона спрямована на автоматизацію деяких дій локомотивних бригад при керуванні поїздом і не має можливості визначити найбільш раціональний режим керування та спрогнозувати наслідки того чи іншого управляючого рішення. В основу корисної моделі поставлена задача удосконалення системи підтримки прийняття рішень для локомотивних бригад шляхом введення в її склад нейромережі оцінки складності нештатних ситуацій та підсистеми оптимізації та прогнозування якості рішень, які використовують математичний апарат теорії штучного інтелекту та забезпечують прийняття рішень по керуванню локомотивом з урахуванням прогнозних значень безпеки руху та витрат енергії на керування поїздом на поточній ділянці. Корисна модель забезпечує додатковий контроль безпеки руху при керуванні поїздом та оптимізує роботу декількох технічних об'єктів в залежності від того стану, в якому знаходиться кожен з них, враховуючи тягові властивості та технічний стан локомотива. Поставлена задача вирішується тим, що система підтримки прийняття рішень для локомотивних бригад, що містить людино-машинний інтерфейс. До складу системи додатково введені база знань, підсистема керування базою знань, нейромережа оцінки складності нештатних ситуацій та підсистема оптимізації та прогнозування якості рішень, які використовують математичний апарат теорії штучного інтелекту та забезпечують прийняття рішень по керуванню локомотивом з урахуванням прогнозних значень безпеки руху, витрат 1 UA 104608 U 5 10 15 20 25 30 35 40 45 50 55 енергії на керування поїздом на поточній ділянці. Підсистема керування базою знань забезпечує доступ інших підсистем до бази знань, які сполучені між собою багатофункціональною поїзною шиною. Суть корисної моделі пояснюють креслення. На фіг. 1 зображено принцип роботи СППР з такими позиціями; 1 - система підтримки прийняття рішень (СППР); 2 - рух поїзда; 3 - локомотивна бригада. СППР 1 одержує повідомлення від системи збору інформації про параметри руху поїзда 2. Її завданням є аналіз різних ситуацій під час руху поїзду 2 та на основі цих повідомлень видача локомотивній бригаді 3 результатів цього аналізу у вигляді рекомендацій на інтерфейс СППР. Локомотивна бригада 3 отримує результати роботи СППР 1, а також своє сприйняття ситуації, виконує керування рухом поїзда. На фіг. 2 зображена структурна схема СППР для локомотивної бригади з такими позиціями: 4 - людино-машинний інтерфейс; 5 - нечіткий класифікатор (оцінка ситуацій); 6 - інтерфейс СППР; 7 - підсистема логічного висновку; 8 - підсистема декомпозиції та агрегування; 9 - підсистема керування базою знань; 10 - підсистема навчання (самонавчання); 11 - сервер залізниці; 12 - нейромережа оцінки складності нештатних ситуацій; 13 - бортова система діагностики локомотива; 14 - підсистеми контролю оточуючого середовища; 15 - база знань; 16 - підсистема індикації логічної структури рішення; 17 - підсистема оптимізації та прогнозування якості рішень; 18 - адміністратор СППР. Людино-машинний інтерфейс 4 призначений для забезпечення взаємодії користувачів (локомотивної бригади 3 та адміністратор СППР 18) з СППР 1. Тут присутні системи введення та системи відображення інформації. Нечіткий класифікатор (оцінка ситуацій) 5 необхідний для моніторингу та розпізнавання та передачі в СППР 1 інформації (образів ситуацій), в яких знаходиться рухомий склад під час руху. Інформація до нього надходить з інтерфейсу СППР 6, призначення якої перетворити фізичні сигнали різних контрольованих величин у прийнятну для сприйняття СППР форму. Підсистема логічного висновку 7, використовуючи формалізовані знання, та через підсистему індикації логічної структури рішення 16 виробляє рекомендації з керування локомотивом. Тут реалізується певна стратегія вибору правил, пов'язана з методом представлення знань в СППР 1 та врахуванням особливостей залізничного транспорту. Коли підсистема логічного висновку 7 не спроможна вирішити завдання з причини нестачі знань, опис задачі передається за допомогою підсистеми керування базою знань на інтерфейс СППР 6, який генерує набір значень, що імітують цю задачу, для підсистеми декомпозиції та агрегування 8. Ця підсистема 8 визначає інші СППР, через підсистему керування базою знань 9, інформація яких необхідна для вирішення даного завдання. Після того, як часткові рішення будуть отримані, підсистема 8 проводить агрегування їх в рішення вихідного завдання. Підсистема навчання (самонавчання) 10 забезпечує первинний набір правил та алгоритмів дії СППР та в процесі роботи корегує цей набір в залежності від умов експлуатації рухомим складом та на підставі досвіду використання інших локомотивів. Інформація від підсистеми 10 надходить на сервер залізниці 11 в метабазу через підсистему керування базою знань 9 та виводиться на інтерфейс СППР 6. Це забезпечує доступ до оновлених правил всіх СППР з'єднаних в мережі залізниці. Підсистема керування базою знань 9 є основним інформаційно-перетворюючим елементом СППР, що забезпечує доступ інших підсистем до бази знань 15, які сполучені між собою багатофункціональною поїзною шиною. Підсистема оптимізації та прогнозування якості рішень 17 виконує розрахунок терміну, на який відбувається прогноз корисності рішення, що перевіряється. Параметрами корисності є відхилення від графіку руху поїзда, витрата енергії на тягу поїздів, складність прогнозованої нештатної ситуації. Таким чином підсистема 17 розраховує прогнозні значення наведених параметрів та їх нормалізований вектор. Оптимальним вважається рішення, що має найменший модуль нормалізованого вектора. 2 UA 104608 U 5 10 15 20 25 Нейромережа оцінки складності нештатних ситуацій 12 забезпечує постійний моніторинг обставин руху на предмет безпеки через нечіткий класифікатор (оцінка ситуацій) 5. Нейромережа оцінки складності нештатних ситуацій 12 оцінює ступінь складності нештатної ситуації і, коли він становиться загрозливим, за допомогою підсистеми логічного висновку 7 забезпечується прийняття рішень, що спрямовані на зниження небезпеки. Нейромережа оцінки складності нештатних ситуацій 12 та підсистема оптимізації та прогнозування якості рішень 17, які використовують математичний апарат теорії штучного інтелекту та забезпечують прийняття рішень по керуванню локомотивом з урахуванням прогнозних значень безпеки руху, витрат енергії на керування поїздом на поточній ділянці, що забезпечує підвищення ефективності використання тягового рухомого складу. Для забезпечення оперативною інформацією СППР до її інтерфейсу за допомогою системи зв'язку та пристрою супутникової навігації підводять дані з сервера залізниці 11 (наприклад: стан сигналів світлофорів попереду, розташування рухомого складу на ділянці, обмеження швидкості та ін.) та бортової системи діагностики локомотива 13, яка складається із засобів вимірювання параметрів руху поїзда, пристрою приймання сигналів автоматичної локомотивної сигналізації, блока пам'яті, пристрою супутникової навігації та підсистеми контролю оточуючого середовища 14, яка складається із набору датчиків контролю за зовнішньою температурою, вологістю, опадами і т. ін., які сполучені відповідними виходами з інтерфейсом СППР 6. Результатом роботи СППР є найбільш раціональне рішення по керуванню локомотивом, що можливо прийняти за даних умов з урахуванням прогнозного значення небезпеки та витрати енергії на тягу поїздів, а також додатковий пристрій контролю безпеки руху. Це рішення виводиться на інтерфейс СППР як інформація (рекомендація) для локомотивної бригади. СППР забезпечує додатковий контроль безпеки руху при керуванні поїздом та оптимізує роботу декількох технічних об'єктів в залежності від того стану, в якому знаходиться кожен з них, враховуючи тягові властивості та технічний стан локомотива. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Система підтримки прийняття рішень для локомотивних бригад, що містить людино-машинний інтерфейс, яка відрізняється тим, що до складу системи додатково введені база знань, підсистема керування базою знань, нейромережа оцінки складності нештатних ситуацій та підсистема оптимізації та прогнозування якості рішень, які використовують математичний апарат теорії штучного інтелекту та забезпечують прийняття рішень по керуванню локомотивом з урахуванням прогнозних значень безпеки руху, витрат енергії на керування поїздом на поточній ділянці, причому підсистема керування базою знань забезпечує доступ інших підсистем до бази знань, які сполучені між собою багатофункціональною поїзною шиною. 3 UA 104608 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюHorobchenko Oleksnadr Mykolaiovych, Babanin Oleksandr Borysovych, Fomin Oleksii Viktorovych, Riabko Kostiantyn Oleksandrovych
Автори російськоюГоробченко Александр Николаевич, Бабанин Александр Борисович, Фомин Алексей Викторович, Рябко Константин Александрович
МПК / Мітки
МПК: B61C 17/12, G05B 13/00
Мітки: підтримки, локомотивних, бригад, прийняття, система, рішень
Код посилання
<a href="https://ua.patents.su/6-104608-sistema-pidtrimki-prijjnyattya-rishen-dlya-lokomotivnikh-brigad.html" target="_blank" rel="follow" title="База патентів України">Система підтримки прийняття рішень для локомотивних бригад</a>
Підсистема підтримки прийняття рішень для керування технологічними комплексами
Номер патенту: 30556
Опубліковано: 25.02.2008
Автори: Іващук Вячеслав Віталійович, Ладанюк Анатолій Петрович, Власенко Лідія Олександрівна
МПК: G05B 13/04
Мітки: рішень, підсистема, технологічними, підтримки, комплексами, прийняття, керування
Формула / Реферат:
Підсистема підтримки прийняття рішень, що містить в своєму складі блок прийняття рішень, базу знань, блок експертних оцінок, блок діагностики і прогнозування, яка відрізняється тим, що в режимі реального часу за допомогою блока діагностики та прогнозування діагностують стан параметрів системи, прогнозують можливі відхилення від заданого режиму та знаходять ідентичні ситуації в базі знань, а при відсутності подібних, за допомогою проведення...
Інформаційно-аналітична система підтримки прийняття рішень
Номер патенту: 32496
Опубліковано: 12.05.2008
Автори: Афанасьєва Людмила Федорівна, Пересунько Михайло Юрійович, Омельченко Євгеній Олександрович, Лисак Наталія Володимирівна, Конкевич Антон Олександрович, Толстоухов Анатолій Володимирович, Франчук Євген Вікторович, Макеєва Таміла Іванівна, Якобюк Ростислав Володимирович
МПК: G06F 13/00
Мітки: система, прийняття, інформаційно-аналітична, підтримки, рішень
Формула / Реферат:
1. Інформаційно-аналітична система підтримки прийняття рішень, що містить автоматизовані робочі місця осіб, які приймають рішення (АРМ ОПР) (1), базовий інформаційно-аналітичний комплекс (ІАК) (2) з підсистемами керування наповненням (3) в централізованій базі даних (БД) (4), синхронізації (5) та взаємодії ОПР з системою (6), яка відрізняється тим, що додатково АРМ ОПР містить цифрово-сенсорний інтерфейс (7) та підсистему біометричної...
Спосіб підтримки прийняття рішень у гірничому виробництві
Номер патенту: 68697
Опубліковано: 10.04.2012
Автори: Купін Андрій Іванович, Музика Іван Олегович
МПК: E21F 17/00
Мітки: підтримки, спосіб, гірничому, виробництві, рішень, прийняття
Формула / Реферат:
Спосіб підтримки прийняття рішень у гірничому виробництві, який включає збір технологічної і техніко-економічної інформації та передачу її на сервер, який містить систему управління базами даних (СУБД), збір інформації від датчиків контролю технологічних процесів та передачу її за допомогою корпоративної комп'ютерної мережі до бази даних (БД) сервера, який відрізняється тим, що систему підтримки прийняття рішень (СППР) створюють із...
Система індивідуальних комунікацій і прийняття складних рішень
Номер патенту: 92416
Опубліковано: 11.08.2014
Автори: Тропіна Альбіна Альбертівна, Рувінський Павло Віталійович, Вовк Євгеній Геннадійович
МПК: B60Q 9/00
Мітки: рішень, прийняття, складних, система, комунікацій, індивідуальних
Формула / Реферат:
Система індивідуальних комунікацій і прийняття складних рішень транспортного засобу з людиною, що складається з блока навчання та фільтрації даних, блока обробки та фільтрації інформації з вбудованих в систему сенсорів, блока керування електроприводом сидінь, блока управління аудіо- і відеоапаратурою, блока управління роздільним клімат-контролем, системи штучного інтелекту, управління якою здійснюється через підключення до CAN-шини...
Спосіб оптимального планування розподілом задач в системі підтримки прийняття рішень
Номер патенту: 92926
Опубліковано: 10.09.2014
Автори: Голубничий Дмитро Юрійович, Карлов Дмитро Володимирович, Бабенко Олександр Іванович, Таран Ігор Андрійович, Третяк В'ячеслав Федорович, Кучук Георгій Анатолійович, Тристан Андрій Вікторович, Хмелевський Сергій Іванович, Смірнов Євгеній Борисович, Малюга Володимир Геннадійович
МПК: G06F 15/00
Мітки: оптимального, планування, спосіб, задач, прийняття, системі, підтримки, рішень, розподілом
Формула / Реферат:
Спосіб оптимального планування розподілом задач в системі підтримки прийняття рішень, який вирішує задачу цілочисельного лінійного програмування з булевими змінними на основі рангового підходу та принципу оптимізації за напрямком, який відрізняється тим, що введено правило відсікання неперспективних варіантів рішень по вибору мінімального значення довжини шляху в графі за вагою обмеження та сортування даних по зростанню значень коефіцієнтів...
Попередній патент: Вітроелектричний агрегат
Наступний патент: Навчальна гра “світ тварин”
Випадковий патент: Аерозолеутворювальний виріб, який має здатний до біологічного розкладання ароматотвірний компонент