Система автоматизованого управління нагнітачами
Номер патенту: 106258
Опубліковано: 25.04.2016
Автори: Князєва Вікторія Миколаївна, Андрєєв Олександр Віталійович, Ключка Євген Павлович, Канюк Геннадій Іванович, Мезеря Андрій Юрійович
Формула / Реферат
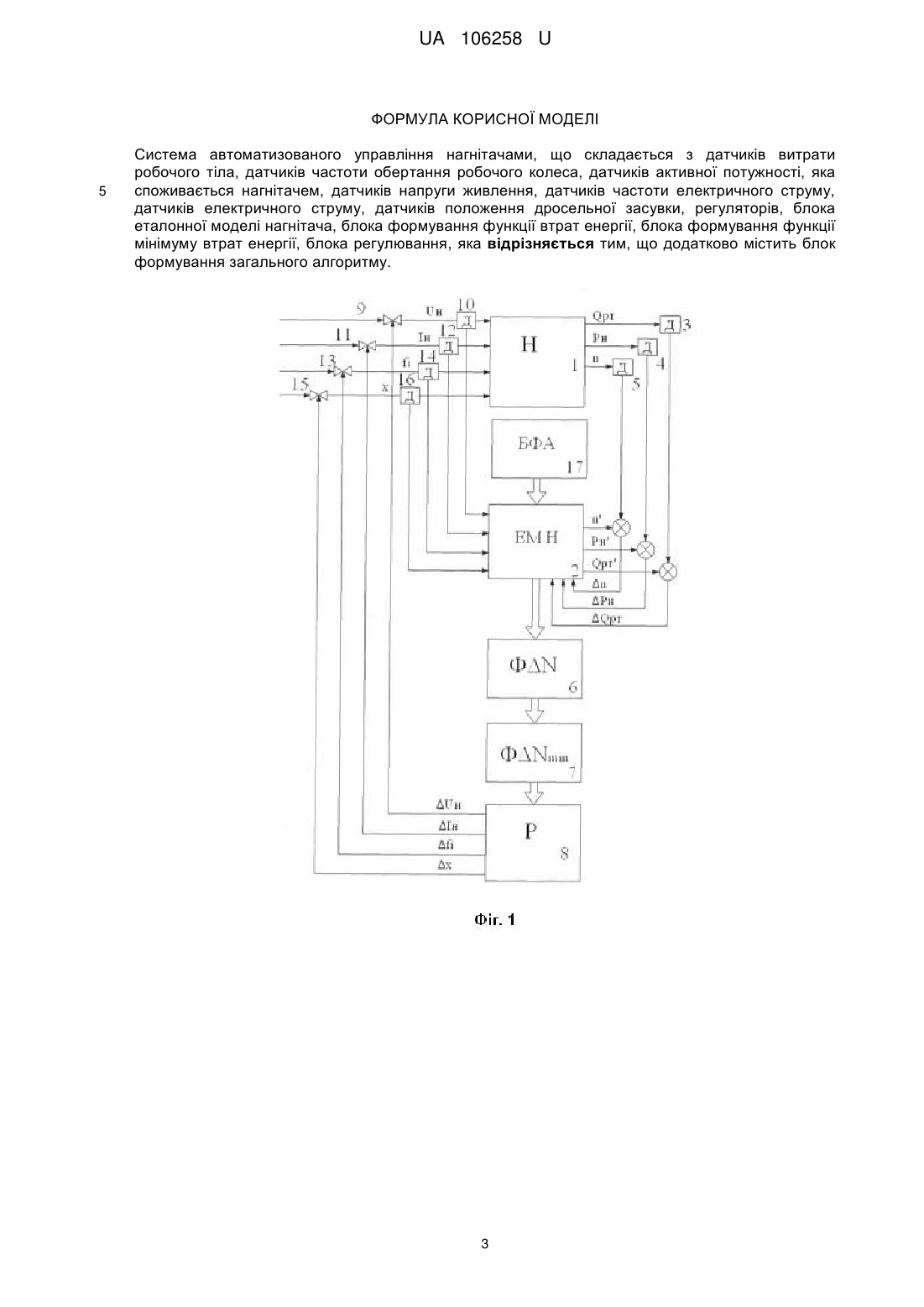
Система автоматизованого управління нагнітачами, що складається з датчиків витрати робочого тіла, датчиків частоти обертання робочого колеса, датчиків активної потужності, яка споживається нагнітачем, датчиків напруги живлення, датчиків частоти електричного струму, датчиків електричного струму, датчиків положення дросельної засувки, регуляторів, блока еталонної моделі нагнітача, блока формування функції втрат енергії, блока формування функції мінімуму втрат енергії, блока регулювання, яка відрізняється тим, що додатково містить блок формування загального алгоритму.
Текст
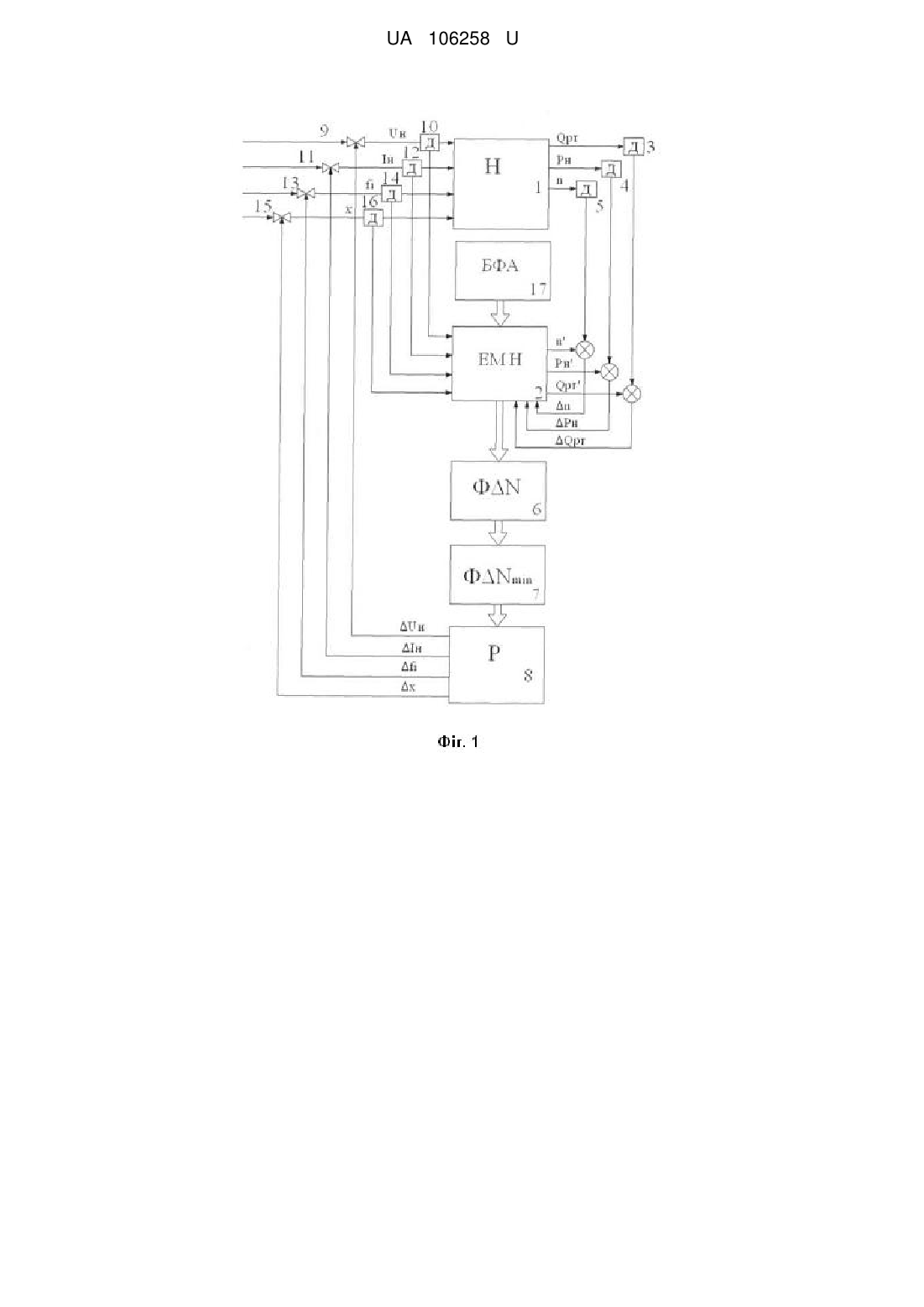
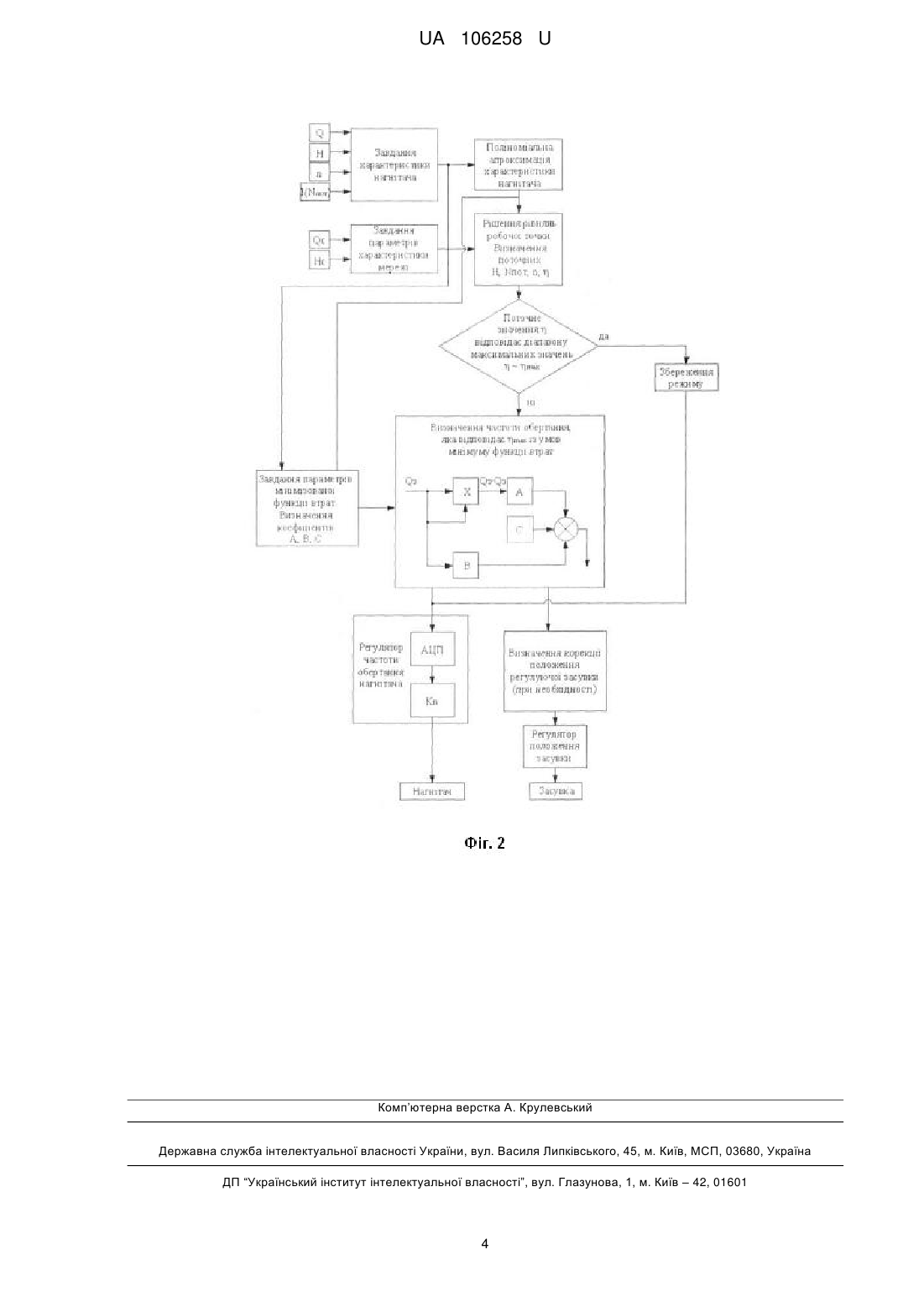
Реферат: Система автоматизованого управління нагнітачами складається з датчиків витрати робочого тіла, датчиків частоти обертання робочого колеса, датчиків активної потужності, яка споживається нагнітачем, датчиків напруги живлення, датчиків частоти електричного струму, датчиків електричного струму, датчиків положення дросельної засувки, регуляторів, блока еталонної моделі нагнітача, блока формування функції втрат енергії, блока формування функції мінімуму втрат енергії, блока регулювання. Додатково система містить блок формування загального алгоритму. UA 106258 U (12) UA 106258 U UA 106258 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем автоматизованого управління технологічними процесами (АСУ ТП), а саме до систем автоматизованого управління нагнітачами (насоси, вентилятори, компресори), і може бути використана для автоматизованого управління нагнітачами електричних станцій, систем аграрного та комунального водопостачання, нафтоперекачувальних станцій (НПС) та в інших галузях промисловості. Нагнітачі є відповідальними споживачами електроенергії, мають велику потужність та значну величину втрат енергії. Так на теплових електростанціях вони є основними споживачами власних потреб. На потужних енергоблоках потужність, яку вони споживають, досягає 13-18 МВт, що складає до 70 % всієї потужності власних потреб (Тепловые и атомные электрические станции: Справочник / Под общ. ред. В.А. Григорьева, В.М. Зорина. - М.: Энергоатомиздат, 1989. - 608 с.). Крім того, насоси є основними технологічними споживачами електроенергії на нафтоперекачувальних станціях, а втрати енергії в них значною мірою визначають сумарні втрати НПС. Основною задачею систем автоматизованого управління нагнітачами є забезпечення необхідної витрати робочого тіла (вода, нафта, шлак, повітря та інше) в кожний момент часу при мінімумі витрат енергії. При цьому необхідно забезпечувати технологічний процес та мати необхідну надійність, швидкодію та енергетичну ефективність нагнітача. Аналогом є система автоматизованого управління "Комплекс-АСВТ" для теплових електростанцій та автоматизована система управління "Комплекс-Титан 2" для атомних електростанцій (Дуель М.О. Автоматизированное управление объектами и технологическими процессами тепловых и атомных электростанций. - Харьков, 2010. - 448 с.). Недоліком аналога є те, що принцип енергозбереження виконується побічно, а при регулюванні відкриття дросельної засувки може не виконуватись взагалі, що збільшує втрати енергії та підвищує витрати електроенергії на власні потреби електричних станцій, НПС та інше. На електростанціях це підвищує собівартість електричної енергії, на перекачувальних станціях збільшує вартість транспорту носія. Найближчим аналогом є система автоматизованого енергозберігаючого управління нагнітачами електростанцій (Пат. 84387 UA, F28B1/00 - № u201302079; Опубл. 25.10.2013. Бюл № 20, 2013 p.). Недоліком існуючої корисної моделі є відсутність блока формування алгоритму. В основу корисної моделі, що заявляється, поставлено задачу зменшення втрат енергії та підвищення енергоефективності нагнітачів. Поставлена задача вирішується тим, що система автоматизованого управління нагнітачами, що складається з датчиків витрати робочого тіла, датчиків частоти обертання робочого колеса, датчиків активної потужності, яка споживається нагнітачем, датчиків напруги живлення, датчиків частоти електричного струму, датчиків електричного струму, датчиків положення дросельної засувки, регуляторів, блока еталонної моделі нагнітача, блока формування функції втрат енергії, блока формування функції мінімуму втрат енергії, блока регулювання, згідно з корисною моделлю, додатково містить блок формування загального алгоритму. Суть корисної моделі пояснюється кресленнями на фіг. 1 та фіг. 2. На фіг. 1 схематично зображено структурна функціональна схема системи автоматизованого управління нагнітачами з блоком визначення загального алгоритму, блоком еталонної моделі нагнітача, блоком формування функції втрат енергії в нагнітачі, блоком формування функції мінімуму втрат енергії в нагнітачі та блоком регулювання. Умовні позначення на фіг. 1: UН напруга Ін струм f частота струму х положення засувки QPT витрати робочого тіла РН тиск n частота обертів UН IH f керуючий вплив х QPT' РH' еталонні значення n' 60 1 UA 106258 U 5 10 15 20 25 30 35 40 45 50 55 QPT РН різниця еталон і реальних n Нагнітач Блок формування алгоритму Еталонна модель нагнітача Блок формування функцій втрат Блок формування функції мінімізації втрат Регулятор На фіг. 2 зображено алгоритм роботи системи автоматизованого управління нагнітачами. Умовні позначення на фіг. 2: Q витрата Н натиск n частота обертів І (Nпот) споживана потужність Qc витрата мережі Нс натиск мережі Qз задана витрата Аналогово-цифровий перетворювач Кn коефіцієнт посилення по частоті Система автоматизованого управління нагнітачем складається з нагнітача 1, блока еталонної моделі нагнітача 2, датчика витрати робочого тіла 3, датчика активної потужності 4, яка споживається приводом нагнітача, датчика частоти обертання нагнітача 5, блока формування функції втрат 6, блока формування функції визначення мінімальних втрат 7, блока регулювання 8, регулятора напруги 9, датчика напруги 10, регулятора струму 11, датчика струму 12, регулятора частоти електричного струму 13, датчика частоти електричного струму 14, регулятора положення дросельної засувки 15, датчика положення дросельної засувки 16 та блока формування загального алгоритму 17. Пристрій працює таким чином: нагнітач 1 приводить в рух робоче тіло, витрата якого визначається датчиком витрати робочого тіла 3, активна потужність, яка споживається нагнітачем - датчиком активної потужності 4, частота обертання робочого колеса - датчиком частоти обертання 5, цифровані сигнали з яких порівнюються з відповідними еталонними сигналами, які генеруються в блоці еталонної моделі нагнітача 2 згідно алгоритму, який визначається в блоці 17, як показано на фіг. 2, та визначаються різниці відповідних сигналів, за величинами цих сигналів та сигналу з датчика напруги 10, датчика струму 12, датчика частоти електричного струму 14, датчика положення дросельної засувки 16 в блоці еталонної моделі 2 генерується сигнал, який потрапляє в блок формування функції втрат 6, а далі залежно від рівня втрат сигнал потрапляє в блок формування функції мінімуму втрат 7, сигнал з якого потрапляє в блок регулювання 8, який дає команди на регулятор напруги 9, регулятор частоти електричного струму 13 та регулятор положення дросельної засувки 15, підтримуючи роботу нагнітача в максимально енергоефективному режимі. Використання еталонної математичної моделі нагнітача, яка в режимі реального часу може змінювати свої параметри залежно від конкретних умов, дозволяє більш точно та повно визначати функцію втрат енергії в будь-який час та виявляти шляхи їх зменшення без порушення основних технологічних показників роботи нагнітача. Позитивний ефект: зменшуються втрати потужності та енергії в нагнітачі на 1 %, підвищується енергоефективність роботи нагнітача, зменшується собівартість електричної енергії, що виробляється на електричних станціях та вартість транспортування носія. Джерела інформації: 1. Тепловые и атомные электрические станции: Справочник / Под общ. ред. В.А. Григорьева, В.М. Зорина. - М.: Энергоатомиэдат, 1989. - 608 с. 2. Плетнев Г.П. Автоматизированное управление объектами тепловых электростанций. Уч. пособие для ВУЗов. - М.: Энергоиздат, 1981. - 368 с. 3. Дуель М.О., Шелепов І.Г. Автоматизация теплоэнергетических установок тепловых и атомных электростанций. Харьков, 2007, 312 с. 4. Дуель М.О. Автоматизированное управление объектами и технологическими процессами тепловых и атомных электростанций. - Харьков, 2010. - 448 с. 5. Пат. 84387 UA, F28B1/00 - № u201302079; Опубл. 25.10.2013. Бюл. № 20, 2013 р. 60 2 UA 106258 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Система автоматизованого управління нагнітачами, що складається з датчиків витрати робочого тіла, датчиків частоти обертання робочого колеса, датчиків активної потужності, яка споживається нагнітачем, датчиків напруги живлення, датчиків частоти електричного струму, датчиків електричного струму, датчиків положення дросельної засувки, регуляторів, блока еталонної моделі нагнітача, блока формування функції втрат енергії, блока формування функції мінімуму втрат енергії, блока регулювання, яка відрізняється тим, що додатково містить блок формування загального алгоритму. 3 UA 106258 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for automatic control of superchargers
Автори англійськоюKaniuk Genadii Ivanovych, Andreiev Oleksandr Vitaliiovych, Mezeria Andrii Yuriiovych, Kniazieva Viktoria Mykolaivna, Kliushka Yevhen Pavlovych
Назва патенту російськоюСистема автоматизированного управления нагнетателями
Автори російськоюКанюк Геннадий Иванович, Андреев Александр Витальевич, Мезеря Андрей Юрьевич, Князева Виктория Николаевна, Клюшка Евгений Павлович
МПК / Мітки
МПК: G05D 15/00, F04D 27/00, G05B 17/00
Мітки: управління, система, автоматизованого, нагнітачами
Код посилання
<a href="https://ua.patents.su/6-106258-sistema-avtomatizovanogo-upravlinnya-nagnitachami.html" target="_blank" rel="follow" title="База патентів України">Система автоматизованого управління нагнітачами</a>
Енергозберігаюча автоматизована система управління нагнітачами електростанцій
Номер патенту: 84387
Опубліковано: 25.10.2013
Автори: Лаптінов Іван Павлович, Мезеря Андрій Юрійович, Канюк Геннадій Іванович
МПК: F28B 1/00
Мітки: система, енергозберігаюча, автоматизована, управління, електростанцій, нагнітачами
Формула / Реферат:
Енергозберігаюча автоматизована система управління нагнітачами електростанцій, що складається з датчиків витрати робочого тіла, датчиків частоти обертання робочого колеса, датчиків активної потужності, яка споживається нагнітачем, датчиків напруги живлення, датчиків частоти електричного струму, датчиків електричного струму, датчиків положення дросельної засувки, регуляторів, яка відрізняється тим, що додатково містить блок еталонної моделі...
Енергозберігаюча автоматизована система управління низькопотенційним комплексом електростанцій
Номер патенту: 82815
Опубліковано: 12.08.2013
Автори: Канюк Геннадій Іванович, Фокіна Ганна Ростиславівна, Мезеря Андрій Юрійович
МПК: F04D 15/00
Мітки: автоматизована, електростанцій, управління, комплексом, енергозберігаюча, система, низькопотенційним
Формула / Реферат:
Енергозберігаюча автоматизована система управління низькопотенційним комплексом електростанцій, що складається з датчика витрати конденсату, датчика тиску конденсату, датчика температури конденсату, датчика пару, датчика витрати циркуляційної води, датчика витрати конденсату, датчика витрати пару крізь ежектори, регуляторів, яка відрізняється тим, що додатково містить блок еталонної моделі низькопотенційного комплексу, блок формування...
Енергозберігаюча автоматизована система управління турбогенераторною установкою
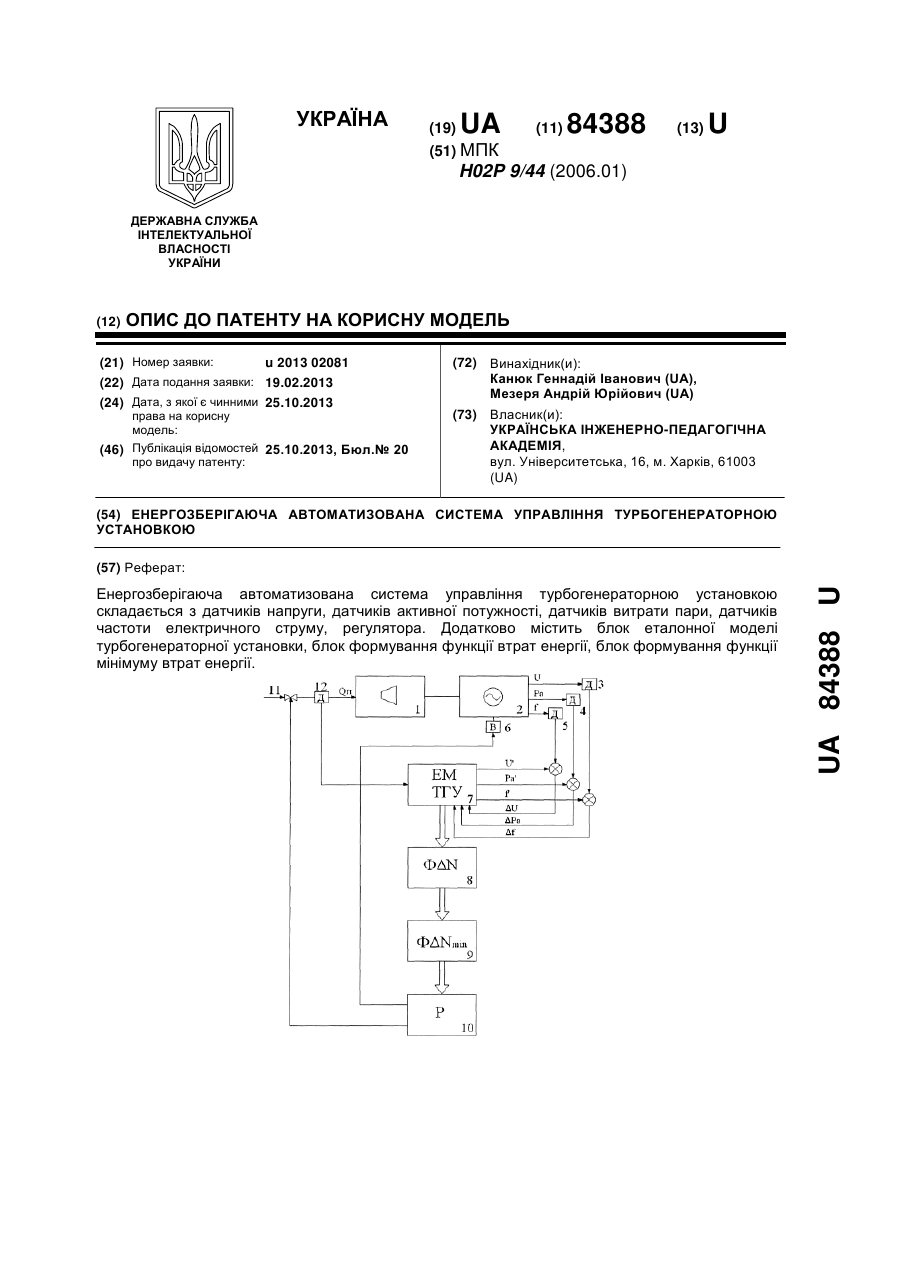
Номер патенту: 84388
Опубліковано: 25.10.2013
Автори: Канюк Геннадій Іванович, Мезеря Андрій Юрійович
МПК: H02P 9/44
Мітки: управління, установкою, турбогенераторною, енергозберігаюча, система, автоматизована
Формула / Реферат:
Енергозберігаюча автоматизована система управління турбогенераторною установкою, що складається з датчиків напруги, датчиків активної потужності, датчиків витрати пари, датчиків частоти електричного струму, регулятора, яка відрізняється тим, що додатково містить блок еталонної моделі турбогенераторної установки, блок формування функції втрат енергії, блок формування функції мінімуму втрат енергії.
Енергозберігаюча автоматизована система управління котельним агрегатом теплових електростанцій
Номер патенту: 82810
Опубліковано: 12.08.2013
Автори: Канюк Геннадій Іванович, Мезеря Андрій Юрійович, Лаптінова Катерина Володимирівна
МПК: F22B 35/00
Мітки: теплових, агрегатом, електростанцій, управління, енергозберігаюча, система, котельним, автоматизована
Формула / Реферат:
Енергозберігаюча автоматизована система управління котельним агрегатом теплових електростанцій, що складається з датчиків витрати пари, датчиків тиску пари, датчиків температури пари, датчиків витрати живильної води, датчиків витрати палива, датчиків витрати повітря, регуляторів, яка відрізняється тим, що додатково містить блок еталонної моделі котельного агрегату, блок формування функції втрат енергії в котельному агрегаті, блок формування...
Система автоматизованого контролю і управління санітарно-гігієнічними параметрами виробничого середовища
Номер патенту: 93386
Опубліковано: 25.09.2014
Автори: Бочковський Андрій Петрович, Сапожнікова Наталя Юріївна
МПК: G06F 3/048
Мітки: автоматизованого, санітарно-гігієнічними, середовища, параметрами, контролю, управління, виробничого, система
Формула / Реферат:
1. Система автоматизованого контролю та управління санітарно-гігієнічними параметрами виробничого середовища, що містить сполучені між собою датчики температури, відносної вологості, швидкості руху повітря, рівня освітленості поверхні робочої зони, аналізатор шкідливих речовин в повітрі робочої зони, а також нормуючі перетворювачі, персональний комп'ютер, керуючий мікропроцесорний пристрій, підсилювачі сигналу, кондиціонер, зволожувач...
Попередній патент: Спосіб прогнозування зрощення перелому
Наступний патент: Формувач одиночної триімпульсної кодової серії з програмованою тривалістю паузи між імпульсами у серії
Випадковий патент: Короткозамкнений ротор асинхронного двигуна