Спосіб електричних перевірок космічного апарата
Номер патенту: 108039
Опубліковано: 24.06.2016
Автори: Каллагов Таймураз Елбрусович, Головинський Сергій Володимирович, Цурова Дина Халітовна, Маринін Павло Миколайович, Васильков Андрій Андрійович, Мискін Федір Кондратович

Формула / Реферат
Спосіб електричних перевірок космічного апарату, що ґрунтується на проведенні вмикання і вимикання космічного апарата, включаючи підключення і відключення бортових джерел електричного живлення або їх наземних імітаторів, автоматизованій видачі команд керування, допусковому контролі дискретних і аналогових параметрів за даними бортової системи телевимірювання і контролі параметрів бортової обчислюваної машини, котрі поставлені на стеження, контролі опору ізоляції бортових шин відносно корпусу, контролі технологічних сигнальних параметрів КА через контакти, формуванні директив автоматичної програми і директив оператора у ручному режимі, формуванні протоколу випробувань, відображенні поточного стану процесу випробувань, який відрізняється тим, що контакти технологічних сигнальних параметрів об'єднують у "n" груп, де n>1, у кожній групі об'єднаних технологічних сигнальних параметрів контакти з'єднують у послідовний ланцюг, причому усі контакти шунтують індивідуальними резисторами різного номіналу, а контроль кожної групи об'єднаних технологічних сигнальних параметрів проводять шляхом вимірювання опору послідовного ланцюга контактів, причому за величиною вимірювального опору судять щодо стану технологічних сигнальних параметрів вимірювальної групи, а опір індивідуальних резисторів вибирають, виходячи з геометричної прогресії, причому знаменник геометричної прогресії вибирають із співвідношення: 3³(Rl+Rпox)/R1, де
R1 - опір першого резистора (першого члена геометричної прогресії), Ом;
Rпox - опір імовірної похибки вимірювання, пов'язаної з наявністю опору з'єднаних проводів, температурного і ресурсного уходу номіналу опору та інше, Ом.
Текст
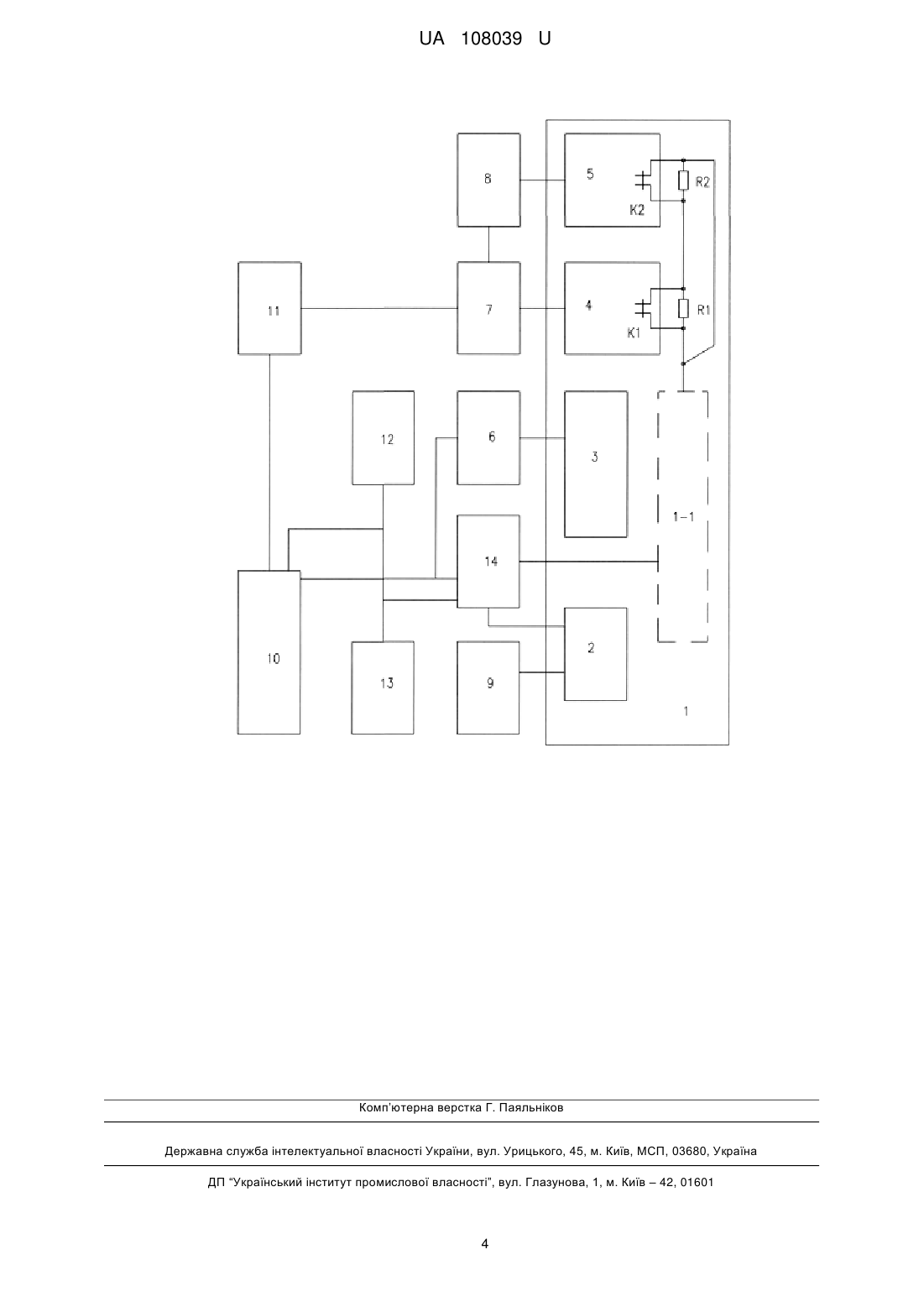
Реферат: Спосіб електричних перевірок космічного апарата ґрунтується на проведенні вмикання і вимикання космічного апарата, включаючи підключення і відключення бортових джерел електричного живлення або їх наземних імітаторів, автоматизованій видачі команд керування, допусковому контролі дискретних і аналогових параметрів за даними бортової системи телевимірювання і контролі параметрів бортової обчислюваної машини, котрі поставлені на стеження, контролі опору ізоляції бортових шин відносно корпусу, контролі технологічних сигнальних параметрів КА через контакти, формуванні директив автоматичної програми і директив оператора у ручному режимі, формуванні протоколу випробувань, відображенні поточного стану процесу випробувань. Контакти технологічних сигнальних параметрів об'єднують у "n" груп, де n>1, у кожній групі об'єднаних технологічних сигнальних параметрів контакти з'єднують у послідовний ланцюг. Всі контакти шунтують індивідуальними резисторами різного номіналу, а контроль кожної групи об'єднаних технологічних сигнальних параметрів проводять шляхом вимірювання опору послідовного ланцюга контактів. За величиною вимірювального опору судять щодо стану технологічних сигнальних параметрів вимірювальної групи, а опір індивідуальних резисторів вибирають, виходячи з геометричної прогресії. UA 108039 U (12) UA 108039 U UA 108039 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки, а саме - до наземного перевірочного обладнання і може використовуватися при електричних випробуваннях космічних апаратів (КА). Під час створення КА велику увагу приділяють забезпеченню високого ступеня надійності електричних перевірок. Ця задача може бути вирішена тільки при умові забезпечення багаторівневого контролю технологічного процесу електричних перевірок КА. Відомим є спосіб електричних перевірок КА, що ґрунтується на автоматизованій видачі технологічних команд і радіокоманд, допусковому контролі дискретних і аналогових параметрів за даними бортової системи телевимірювань, контролі параметрів бортової обчислювальної машини, котрі поставлені на стеження, контролі опору ізоляції бортових шин відносно корпусу, формуванні директив оператора у ручному режимі, формуванні протоколу випробувань, відображенні поточного стану процесу випробувань [див. патент РФ № 2.245.825, МПК G01R 31/00, 2003 р.]. Недоліком цього способу перевірок є його низькі експлуатаційні характеристики через необхідність виведення для контролю із КА великої кількості дискретних (технологічних, котрі використовуються тільки на Землі, а не в польоті) параметрів, що веде до неефективного збільшенню маси самого КА. Найближчим до запропонованого по технічному рішенню є вибраний як прототип спосіб електричних перевірок КА, який втілений у патенті РФ № 2.447.002, МПК G01R 31/00, 2010 р. Цей спосіб полягає у проведенні вмикання і вимикання космічного апарату, включаючи підключення і відключення бортових джерел електричного живлення або їх наземних імітаторів, автоматизованій видачі команд керування, допусковому контролі дискретних і аналогових параметрів за даними бортової системи телевимірювання і контролі параметрів бортової обчислюваної машини, котрі поставлені на стеження, контролі опору ізоляції бортових шин відносно корпусу, формуванні директив автоматичної програми і директив оператора у ручному режимі, формуванні протоколу випробувань, відображенні поточного стану процесу випробувань, при цьому у процесі проведення вмикання КА перед підключенням бортових джерел електричного живлення або їх наземних імітаторів додатково контролюють електричний опір між шинами живлення КА щодо відповідності його наперед заданому значенню, а при його невідповідності наперед заданому значенню вмикання КА забороняють. Контроль технологічних сигнальних параметрів КА здійснюють через контакти систем (приладів). Недоліком цього способу перевірок є його невисокі експлуатаційні характеристики через необхідність виведення для контролю із КА великої кількості дискретних (технологічних, котрі використовуються тільки на Землі, а не в польоті) параметрів, тобто через нетехнологічність контролю дискретних параметрів КА у процесі проведення його електричних перевірок, що призводить до штучного обмеження їх кількості і знижує таким чином надійність процесу електричних перевірок КА. В основу корисної моделі поставлена задача створення удосконаленого способу електричних перевірок КА, який би дозволяв підвищити його експлуатаційні характеристики шляхом уведення в нього нових операцій, таких як: контакти технологічних сигнальних параметрів об'єднуються у "n" груп, де n1, у кожній групі об'єднаних технологічних сигнальних параметрів контакти з'єднуються у послідовний ланцюг, при цьому усі контакти шунтуються індивідуальними резисторами різного номіналу, а контроль кожної групи об'єднаних технологічних сигнальних параметрів проводиться шляхом вимірювання опору послідовного ланцюга контактів, причому за величиною вимірювального опору судять щодо стану технологічних сигнальних параметрів вимірювальної групи, а опір індивідуальних резисторів вибирається виходячи з геометричної професії, причому знаменник геометричної прогресії вибирають із співвідношення: З>(R1+Rпох)/R1, де R1 - опір першого резистора (першого члена геометричної прогресії), Ом; Rпох - опір імовірної похибки вимірювання, пов'язаної з наявністю опору з'єднаних проводів, температурного і ресурсного уходу номіналу опору та інше, Ом, що дозволяє підвищити технологічність контролю дискретних параметрів КА у процесі проведення його електричних перевірок. Поставлена задача вирішується тим, що у запропонованому способі електричних перевірок КА, що ґрунтується на проведенні вмикання і вимикання космічного апарату, включаючи підключення і відключення бортових джерел електричного живлення або їх наземних імітаторів, автоматизованої видачі команд керування, допускового контролю дискретних і аналогових параметрів за даними бортової системи телевимірювання і контролю параметрів бортової обчислюваної машини, котрі поставлені на стеження, контролі опору ізоляції бортових шин відносно корпусу, контролю технологічних сигнальних параметрів КА через контакти, 1 UA 108039 U 5 10 15 20 25 30 35 40 45 50 55 60 формуванні директив автоматичної програми і директив оператора у ручному режимі, формуванні протоколу випробувань, відображення поточного стану процесу випробувань, в ньому контакти технологічних сигнальних параметрів об'єднують у "n" груп, де n1, у кожній групі об'єднаних технологічних сигнальних параметрів контакти з'єднують у послідовний ланцюг, при цьому усі контакти шунтують індивідуальними резисторами різного номіналу, а контроль кожної групи об'єднаних технологічних сигнальних параметрів проводять шляхом вимірювання опору послідовного ланцюга контактів, причому за величиною вимірювального опору судять щодо стану технологічних сигнальних параметрів вимірювальної групи. Опір індивідуальних резисторів вибирають, виходячи з геометричної прогресії, причому знаменник геометричної прогресії вибирають із співвідношення: З>(R1+Rпох)/R1, де R1 - опір першого резистора (першого члена геометричної прогресії), Ом; Rпox - опір імовірної похибки вимірювання, пов'язаної з наявністю опору з'єднаних проводів, температурного і ресурсного уходу номіналу опору та інше, Ом. Дійсно, об'єднання усіх контактів у послідовний ланцюг дозволить отримувати загальний і універсальний параметр контролю вихідного, який можливо використовувати при будь-якій конфігурації стану КА. Якщо у всіх системах (приладах) вихідний стан (відповідні контакти "К" замкнені), то вимірювання опору буде мінімальним (до декількох Ом). Якщо десь відсутнє вихідне (відповідні контакти "К" розімкнені), то у ланцюг, що вимірюють, додається відповідний опір "R". Вибір опору із низки геометричної прогресії робить будь-яке сполучення замкнених і розімкнених контактів "К" унікальним. Для урахування імовірності похибки вимірювання, пов'язаної з наявністю опору з'єднаних проводів, температурного і ресурсного уходу номіналу опору і іншого доцільно використати рекомендацію щодо вибору знаменника геометричної прогресії: З>(R1+Rпох)/R1, де R1 - опір першого резистора (першого члена геометричної прогресії), Ом; Rпox - опір імовірної похибки вимірювання, пов'язаної з наявністю опору з'єднаних проводів, температурного і ресурсного уходу номіналу опору та інше, Ом. Аналогічно буде працювати (контролюватися) і будь-яка інша група технологічних параметрів. Для пояснення способу перевірок додаються креслення, на яких зображена функціональна схема наземної системи керування і контролю електричних перевірок КА, у якій втілюється даний спосіб, та його детальний опис. При цьому структура складу приладів КА повністю не розкрита, зображені окремі елементи, котрі безпосередньо взаємодіють з наземною системою. Космічний апарат 1 містить: бортові шини живлення 2; командну матрицю 3 системи керування бортовою апаратурою за радіокомандами (РК) і технологічними командами (ТК); систему бортових телевимірювань (ТМ) 4, яка містить контакти контролю вихідного К1, зашунтовані резистором R1; бортову обчислювану машину (БОМ) 5, яка містить контакти контролю вихідного К2, зашунтовані резистором R2, інші системи і прилади КА (не зображені). Система керування і контролю електричних перевірок КА містить наступні основні блоки: блок 6 формування команд керування (РК, ТК); блок 7 зв'язку з системою бортових телевимірювань 4 (Контроль ТМ); блок 8 зв'язку з бортовою обчислюваною машиною 5 (Контроль БОМ); блок 9 контролю опору ізоляції бортових шин живлення 2 (Rізоляції); блок 10 формування директив оператора в автоматичному режимі (Процесор); блок 11 формування директив оператора в ручному режимі (Оператор); блок 12 формування протоколу випробувань (Протокол); блок 13 відображення (Монітор); блок 14 вимірювань електричного опору ланцюгів (Rланцюгів). Система працює наступним чином. У блок 10 формування директив оператора в автоматичному режимі закладають циклограми різних електричних перевірок, у тому числі і циклограми вмикання і вимикання КА. Оператор через блок 11 формування директив оператора в ручному режимі запускає необхідну циклограму. Далі процес йде автоматично. Поточні дані робіт відображуються на блоці 13 відображення і запам'ятовуються у блоку 12 формування протоколу випробувань. Блок 10 формування директив оператора в автоматичному режимі ініціює видачу команд керування через блок 6 формування команд керування, аналізує інформацію, що надходить від бортової телеметрії і БОМ 5 через блок 7 зв'язку з системою бортових телевимірювань 4 та блок 8 зв'язку з БОМ 5. Паралельно йде контроль опору ізоляції через блок 9 контролю опору ізоляції бортових шин живлення 2. Розглянемо роботу системи на прикладі контролю параметрів вихідного систем (приладів) КА. При кількості технологічних сигнальних контактів у групі 10 (для прикладу), опору першого резистора 10 Ом і опору імовірної похибки 5 Ом, можливо використовувати резистори наступної 2 UA 108039 U 5 10 низки (геометричної прогресії зі знаменником З>(R1+Rпох)/R1+(10+5)/10=1,5) зі знаменником (для прикладу), що дорівнює 2: 10, 20, 40, 80, 160, 320, 640, 1280,2560,5120 Oм. Перед вмиканням КА для проведення електричних випробувань контролюють електричний опір групи об'єднаних технологічних сигнальних параметрів контролю вихідного систем (приладів) К А через блок 14 вимірювань електричного опору. У випадку, якщо значення, що виміряли, не відповідає мінімальному значенню, з'являється повідомлення о системах (приладах), де вихідне відсутнє, що дозволяє оперативно усунути зауваження і продовжити роботу. Перевірки окремих систем КА можуть здійснюватися за патентом РФ № 2.548.313, МПК G01R 31/00, 2013 р. Стенд для перевірок КА може виконуватися за патентом США № 3.535.683, клас 340-172.5, 1967 р. Таким чином, запропонований спосіб підвищує надійність і розширює функціональні можливості процесу електричних перевірок КА. 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 Спосіб електричних перевірок космічного апарата, що ґрунтується на проведенні вмикання і вимикання космічного апарата, включаючи підключення і відключення бортових джерел електричного живлення або їх наземних імітаторів, автоматизованій видачі команд керування, допусковому контролі дискретних і аналогових параметрів за даними бортової системи телевимірювання і контролі параметрів бортової обчислюваної машини, котрі поставлені на стеження, контролі опору ізоляції бортових шин відносно корпусу, контролі технологічних сигнальних параметрів КА через контакти, формуванні директив автоматичної програми і директив оператора у ручному режимі, формуванні протоколу випробувань, відображенні поточного стану процесу випробувань, який відрізняється тим, що контакти технологічних сигнальних параметрів об'єднують у "n" груп, де n>1, у кожній групі об'єднаних технологічних сигнальних параметрів контакти з'єднують у послідовний ланцюг, причому усі контакти шунтують індивідуальними резисторами різного номіналу, а контроль кожної групи об'єднаних технологічних сигнальних параметрів проводять шляхом вимірювання опору послідовного ланцюга контактів, причому за величиною вимірювального опору судять щодо стану технологічних сигнальних параметрів вимірювальної групи, а опір індивідуальних резисторів вибирають, виходячи з геометричної прогресії, причому знаменник геометричної прогресії вибирають із співвідношення: 3(R1+Rпox)/R1, де: R1 - опір першого резистора (першого члена геометричної прогресії), Ом; Rпox - опір імовірної похибки вимірювання, пов'язаної з наявністю опору з'єднаних проводів, температурного і ресурсного уходу номіналу опору та інше, Ом. 3 UA 108039 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01R 31/00
Мітки: спосіб, електричних, космічного, апарата, перевірок
Код посилання
<a href="https://ua.patents.su/6-108039-sposib-elektrichnikh-perevirok-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб електричних перевірок космічного апарата</a>
Спосіб електричних перевірок космічного апарата
Номер патенту: 81847
Опубліковано: 10.07.2013
Автори: Бублик Віктор Григорович, Мокін Олександр Васильович, Шелестов Олександр Іванович, Галкін Валентин Васильович, Мокін Андрій Олександрович, Опенько Сергій Григорович
МПК: B64G 5/00, G01R 31/00
Мітки: спосіб, перевірок, космічного, апарата, електричних
Формула / Реферат:
1. Спосіб електричних перевірок космічного апарата, що ґрунтується на проведенні вмикання і вимикання космічного апарата, включаючи підключення або відключення бортових джерел електричного живлення або їх наземних імітаторів, автоматизованій видачі команд керування, допусковому контролі дискретних і аналогових параметрів за даними бортової системи телевимірювань і контролі поставлених на стеження параметрів бортової обчислювальної системи,...
Спосіб електричних перевірок космічного апарата
Номер патенту: 96418
Опубліковано: 10.02.2015
Автори: Пахомов Василь Олександрович, Воронцов Олексій Валерійович, Мокін Андрій Олександрович, Коротких Віктор Володимирович, Мокін Олександр Васильович, Романюк Василь Михайлович
МПК: B64G 5/00, G01R 31/00
Мітки: електричних, апарата, спосіб, космічного, перевірок
Формула / Реферат:
Спосіб електричних перевірок космічного апарата, що ґрунтується на проведенні вмикання і вимикання космічного апарата, включаючи підключення або відключення імітаторів сонячних і акумуляторних батарей до космічного апарата, та контролю поставлених на стеження параметрів, включаючи контроль вихідного струму імітаторів акумуляторних батарей, який відрізняється тим, що про факт вмикання і вимикання космічного апарата додатково судять за...
Спосіб електричних перевірок космічного апарата
Номер патенту: 104924
Опубліковано: 25.02.2016
Автори: Щетинський Олександр Стефанович, Капранов Андрій Вадимович, Тютюнін Тимофій Вікторович, Міняйло Маргарита Олексіївна, Стукан Галина Андріївна, Машкіна Тетяна Михайлівна
МПК: B64G 5/00, G01R 31/00
Мітки: апарата, спосіб, електричних, перевірок, космічного
Формула / Реферат:
1. Спосіб електричних перевірок космічного апарата, що ґрунтується на проведенні вмикання і вимикання космічного апарата, включаючи підключення і відключення бортових джерел електричного живлення - акумуляторних батарей, який відрізняється тим, що до акумуляторних батарей перед вмиканням космічного апарата підключають наземні стабілізовані джерела електричного живлення, а після вимикання космічного апарата додатково контролюють струми...
Спосіб виготовлення космічного апарата
Номер патенту: 89917
Опубліковано: 12.05.2014
Автори: Мокін Андрій Олександрович, Дунаєв Володимир Ілліч, Нестеришин Михайло Владленович, Мокін Олександр Васильович, Агранович Єлена Геннадіївна, Спасський Валерій Леонідович
Мітки: апарата, космічного, спосіб, виготовлення
Формула / Реферат:
1. Спосіб виготовлення космічного апарата, що включає виготовлення комплектуючих, складання космічного апарата, підготовку джерела електроенергії до роботи, проведення електричних випробувань космічного апарата на функціонування з підключенням до промислової мережі електропостачання, випробувань на дію механічних навантажень, термовакуумних випробувань, а також заключних випробувань з контролем стиковки сонячних і штатних акумуляторних...
Спосіб виготовлення космічного апарата
Номер патенту: 89495
Опубліковано: 25.04.2014
Автори: Кочура Сергій Григорович, Мокін Андрій Олександрович, Новгородов Олександр Афанасійович, Замарайкін Віктор Петрович, Серебряков Михайло Олександроович, Мокін Олександр Васильович
Мітки: спосіб, виготовлення, апарата, космічного
Формула / Реферат:
1. Спосіб виготовлення космічного апарата, що містить складання космічного апарата, котрий включає сонячні батареї, акумуляторні батареї і стабілізований перетворювач напруги з вхідними силовими ланцюгами, підготовку наземного джерела електроенергії до роботи та проведення електричних випробувань космічного апарата, який відрізняється тим, що вхідні силові ланцюги стабілізованого перетворювача напруги з боку підключення сонячних батарей, у...