Спосіб захисту електродвигуна з використанням тривимірних векторів моніторингу
Номер патенту: 117170
Опубліковано: 26.06.2017
Автори: Демчик Ярослав Михайлович, Дубовик Володимир Григорович, Лебедєв Лев Миколайович, Гуров Георгій Віталійович

Формула / Реферат
Спосіб захисту електродвигуна з використанням тривимірних векторів моніторингу, що включає формування двовимірного часового ряду з часткових сум квадратів діючих значень струмів електродвигуна, поділених на кількість доданків часткових сум, формування решітчастого інформаційного поля за допомогою ортогональних векторів вкладень до двовимірною часового ряду, прийняття рішення про видачу попереджувального сигналу або відключення електродвигуна від мережі живлення при перевищенні прогнозним значенням в будь-якому з елементів двовимірного часового ряду гранично припустимого рівня, який відрізняється тим, що спочатку формують двовимірне решітчасте інформаційне поле за допомогою двовимірних ортогональних векторів вкладень, далі формують одновимірні вектори вкладень до решітчастого інформаційного поля і створюють тривимірні вектори моніторингу з інформаційними вузлами в вигляді куба, а ортогональні та діагональні інформаційні осі перехрещуються в його кутах, для захисту вибирають вектор моніторингу з найменшою похибкою прогнозування на час прийняття рішення.
Текст
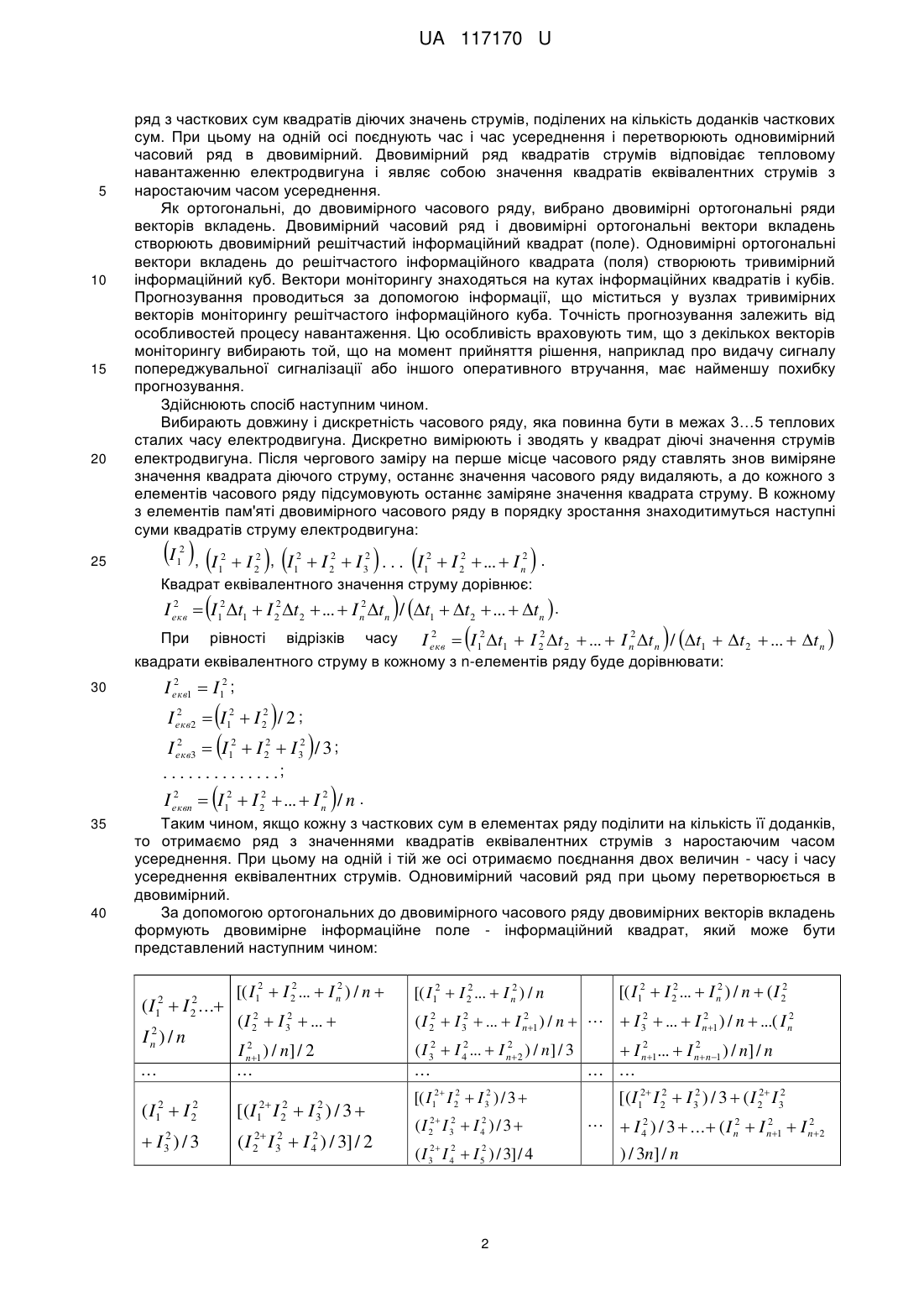
Реферат: Спосіб захисту електродвигуна з використанням тривимірних векторів моніторингу включає формування двовимірного часового ряду з часткових сум квадратів діючих значень струмів електродвигуна, поділених на кількість доданків часткових сум, формування решітчастого інформаційного поля за допомогою ортогональних векторів вкладень до двовимірною часового ряду, прийняття рішення про видачу попереджувального сигналу або відключення електродвигуна від мережі живлення при перевищенні прогнозним значенням в будь-якому з елементів двовимірного часового ряду гранично припустимого рівня. Спочатку формують двовимірне решітчасте інформаційне поле за допомогою двовимірних ортогональних векторів вкладень, далі формують одновимірні вектори вкладень до решітчастого інформаційного поля і створюють тривимірні вектори моніторингу з інформаційними вузлами в вигляді куба, а ортогональні та діагональні інформаційні осі перехрещуються в його кутах, для захисту вибирають вектор моніторингу з найменшою похибкою прогнозування на час прийняття рішення. UA 117170 U (12) UA 117170 U UA 117170 U 5 10 15 20 25 30 35 40 45 50 55 Запропонована корисна модель належить до електротехніки і може бути використана для захисту електродвигуна з частими пусками і стохастичною зміною кратності та експозиції струмових перевантажень. Відомо спосіб захисту електродвигуна, що включає безперервне вимірювання струму електродвигуна, відключення електродвигуна від мережі при перевищенні гранично допустимої тривалості струмового перевантаження в будь-якій з n-контрольованих точок. При цьому струм електродвигуна підносять до квадрата, часовий ряд квадратів струму електродвигуна записують в елементи пам'яті часового ряду заданої довжини і дискретності, при надходженні чергового значення квадрата струму електродвигуна вміст елементів пам'яті зрушують на крок, останнє значення видаляють, знов виміряне значення квадрата струму ставлять на перше місце часового ряду і додають до вмісту всіх подальших елементів пам'яті часового ряду, при перевищенні суми квадратів струму в будь-якому елементі пам'яті часового ряду гранично допустимого значення електродвигун відключають від мережі. Недоліком відомого способу є низька надійність із-за відсутності прогнозу для вчинення попереджувальних дій при захисті електродвигуна з частими пусками і стохастичною зміною експозиції та різними значеннями кратності струмових перевантажень [1]. Найближчим аналогом до способу, що заявляється, є спосіб захисту електродвигуна, що включає безперервне вимірювання струмів електродвигуна і піднесення їх у квадрат, запис сум квадратів струму в елементи пам'яті вихідного часового ряду заданої довжини і дискретності, видалення вмісту останнього елемента та зсовування на крок вмісту всіх елементів пам'яті часового ряду при надходженні чергового значення виміряного струму, вміщення нового значення квадрата струму на перше місце і підсумовування його до вмісту всіх подальших елементів пам'яті вихідного часового ряду, відімкнення електродвигуна від мережі при перевищенні в елементі пам'яті гранично допустимого значення суми квадратів струмів. При цьому з даних, які постійно оновлюють в елементах пам'яті вихідного часового ряду при черговому вимірюванні струмів, формують додаткові часові ряди з вибраною дискретністю та довжиною, прогнозують їх зміну, при перевищенні будь-яким прогнозованим значенням гранично припустимого рівня суми квадратів струмів відмикають електродвигун від мережі. Недоліком відомого способу є низька надійність із-за недосконалості процедури прогнозу нестаціонарних рядів для вчинення попереджувальних дій при захисті електродвигуна з частими пусками і стохастичною зміною експозиції та різними значеннями кратності струмових перевантажень [2]. В основу корисної моделі поставлена задача підвищення надійності роботи захисту, при стохастичної кратності та експозиції перевантажень електродвигуна, шляхом підвищення точності прогнозування нестаціонарних рядів за допомогою одного з тривимірних векторів моніторингу з найменшою похибкою прогнозування на час прийняття рішення для вчинення попереджувальних дій. Поставлена задача вирішується тим, що спосіб захисту електродвигуна з використанням тривимірних векторів моніторингу, що включає формування двовимірного часового ряду з часткових сум квадратів діючих значень струмів електродвигуна, поділених на кількість доданків часткових сум, формування решітчастого інформаційного поля за допомогою ортогональних векторів вкладень до двовимірного часового ряду, прийняття рішення про видачу попереджувального сигналу або відключення електродвигуна від мережі живлення при перевищенні прогнозним значенням в будь-якому з елементів двовимірного часового ряду гранично припустимого рівня. В якому відповідно до корисної моделі спочатку формують двовимірне решітчасте інформаційне поле за допомогою двовимірних ортогональних векторів вкладень, далі формують одновимірні вектори вкладень до решітчастого інформаційного поля і створюють тривимірні вектори моніторингу з інформаційними вузлами в вигляді кубу, а ортогональні та діагональні інформаційні осі перехрещуються в його кутах, для захисту вибирають вектор моніторингу з найменшою похибкою прогнозування на час прийняття рішення. При стохастичному характері зміни навантаження оперують не абсолютними, а еквівалентними за тепловими втратами значеннями діючих струмів. Якщо еквівалентний струм усереднюють на коротких проміжках часу (секундах), то виявити тривалі незначні 5 %…10 % струмові перевантаження неможливо. Якщо еквівалентний струм контролюють за допомогою усереднення на тривалих проміжках часу (десятках хвилин), то неможливо вчасно виявити перевантаження пусковими струмами. Для надійної роботи захисту потрібен контроль діючих значень еквівалентних струмів у всьому діапазоні часів усереднення, тобто від t до n t , де t - крок дискретизації двовимірного часового ряду, n-кількість кроків. Такий контроль 60 можливий за допомогою двовимірних часових рядів. Для цього формують двовимірний часовий 1 UA 117170 U 5 10 15 20 ряд з часткових сум квадратів діючих значень струмів, поділених на кількість доданків часткових сум. При цьому на одній осі поєднують час і час усереднення і перетворюють одновимірний часовий ряд в двовимірний. Двовимірний ряд квадратів струмів відповідає тепловому навантаженню електродвигуна і являє собою значення квадратів еквівалентних струмів з наростаючим часом усереднення. Як ортогональні, до двовимірного часового ряду, вибрано двовимірні ортогональні ряди векторів вкладень. Двовимірний часовий ряд і двовимірні ортогональні вектори вкладень створюють двовимірний решітчастий інформаційний квадрат (поле). Одновимірні ортогональні вектори вкладень до решітчастого інформаційного квадрата (поля) створюють тривимірний інформаційний куб. Вектори моніторингу знаходяться на кутах інформаційних квадратів і кубів. Прогнозування проводиться за допомогою інформації, що міститься у вузлах тривимірних векторів моніторингу решітчастого інформаційного куба. Точність прогнозування залежить від особливостей процесу навантаження. Цю особливість враховують тим, що з декількох векторів моніторингу вибирають той, що на момент прийняття рішення, наприклад про видачу сигналу попереджувальної сигналізації або іншого оперативного втручання, має найменшу похибку прогнозування. Здійснюють спосіб наступним чином. Вибирають довжину і дискретність часового ряду, яка повинна бути в межах 3…5 теплових сталих часу електродвигуна. Дискретно вимірюють і зводять у квадрат діючі значення струмів електродвигуна. Після чергового заміру на перше місце часового ряду ставлять знов виміряне значення квадрата діючого струму, останнє значення часового ряду видаляють, а до кожного з елементів часового ряду підсумовують останнє заміряне значення квадрата струму. В кожному з елементів пам'яті двовимірного часового ряду в порядку зростання знаходитимуться наступні суми квадратів струму електродвигуна: I , I 2 1 25 2 1 2 2 2 2 I 2 , I12 I 2 I 32 . . . I12 I 2 ... I n . Квадрат еквівалентного значення струму дорівнює: 2 2 2 I екв I12 t1 I 2 t 2 ... I n t n / t1 t 2 ... t n . При рівності відрізків часу 2 2 2 I екв I12 t1 I 2 t 2 ... I n t n / t1 t 2 ... t n квадрати еквівалентного струму в кожному з n-елементів ряду буде дорівнювати: 2 I екв1 I12 ; 30 I 2 2 I екв2 I12 I 2 / 2 ; 2 I екв3 2 1 2 I 2 I 32 / 3 ; . . . . . . . . . . . . . .; 2 2 2 I еквn I12 I 2 ... I n / n . 35 40 Таким чином, якщо кожну з часткових сум в елементах ряду поділити на кількість її доданків, то отримаємо ряд з значеннями квадратів еквівалентних струмів з наростаючим часом усереднення. При цьому на одній і тій же осі отримаємо поєднання двох величин - часу і часу усереднення еквівалентних струмів. Одновимірний часовий ряд при цьому перетворюється в двовимірний. За допомогою ортогональних до двовимірного часового ряду двовимірних векторів вкладень формують двовимірне інформаційне поле - інформаційний квадрат, який може бути представлений наступним чином: 2 2 [( I12 I 2 ... I n ) / n 2 2 [( I12 I 2 ... I n ) / n 2 ( I 2 I 32 ... 2 2 2 2 ( I 2 I 32 ... I n1 ) / n ... I 32 ... I n1 ) / n ...( I n ... 2 I n1 ) / n] / 2 ... 2 2 2 2 ( I 32 I 4 ... I n 2 ) / n] / 3 I n1... I n n1 ) / n] / n ... ... ... 2 ( I12 I 2 2 [(I12 I 2 I 32 ) / 3 I 32 ) / 3 2 2 ( I 2 I 32 I 4 ) / 3] / 2 ( I I ... 2 1 2 2 2 n I )/n 2 [( I12 I 2 I 32 ) / 3 2 2 ( I 2 I 32 I 4 ) / 3 2 ( I 32 I 4 I 52 ) / 3] / 4 2 2 2 2 [( I12 I 2 ... I n ) / n ( I 2 2 2 [(I12 I 2 I 32 ) / 3 ( I 2 I 32 ... I 2 ) / 3 ... ( I 2 I 2 I 2 4 n n 1 n 2 ) / 3n] / n UA 117170 U I 2 1 2 I2 / 2 2 2 2 2 2 2 [(I12 I 2 ) / 2 ( I 2 I 32 ) [(I1 I 2 ) / 2 ( I 2 I 3 2 ) / 2 ( I 32 I 4 ) / 2] / 3 2 ( I12 I 2 ) / 2 I12 / 2] / 2 ... 2 ( I12 I 2 I 32 ) / 3 2 [(I12 I 2 ) / 2 ... 2 2 ( I n I n1 ) / 2] / n 2 2 ... ( I12 I 2 ... I n ) / n Вектори моніторингу нижнього лівого кута двовимірного інформаційного поля (квадрата), що мають незалежну інформацію, можуть бути представлені наступним чином: I I12 2 1 I I I I / 3 [I I I / 3 I I I / 3 I I I / 3] / 4 2 I2 / 2 2 1 2 2 / 2] / 2 2 2 I 2 3 2 3 2 2 3 2 2 4 / n ( I 2 1 2 2 I 2 ... I n / n 2 1 2 2 I 2 ... I n 2 2 I 32 2 2 2 ... I n1 ) / n ... ( I n I n1 ... 2 4 2 3 I I ... 2 3 2 2 1 2 [ I I /2 I12 2 1 2 2 2 ... I n n1 ) / n] / n 2 5 5 Ліве та переднє поля - сторони інформаційного куба однакові і можуть бути представлені наступним чином: I n2 I ... ... I I I I I 42 I 32 I I 10 2 2 2 1 20 25 I 2 In / 2 2 I4 2 2 I 2 3 2 1 I 2 2 I I I I I 52 / 2 2 3 2 2 I n1 I n 2 / 3 ... / 2 / 2 / 2 2 4 2 n ... ... / 3 / 3 / 3 2 4 I 52 I 62 / 3 2 3 2 I 4 I 52 2 2 2 3 I I 2 4 2 1 I I 2 3 2 2 ... ... ... I 2 n 2 2 I n1... I nn / n ... I I I I 2 4 2 2 I 52 ... I n 2 I n 3 / n 2 3 2 2 I 4 ... I n 2 / n 2 2 2 I ... I n1 / n 2 1 I ... I / n 2 3 2 2 2 n Діагональні вектори моніторингу інформаційного куба можуть бути представлені наступним чином: I 15 2 n 1 I 2 1 2 2 I 2 3 / 2 2 [ I 32 I 4 / 2 I I I 2 4 2 5 2 5 I 62 / 2 / 2] / 3 2 [ I 4 I 52 I 62 / 3 I 2 2 5 6 / 3] / 4 I I I 72 / 3 2 2 7 8 I I 92 ... 2 2 [I n ... I 2 n / n ... 2 I 2 n ... I 32n 1 / n] / n Відомими методами отримують прогнозні значення векторів моніторингу за ортогональними осями і діагоналями тривимірного інформаційного куба. Оцінюють похибки прогнозування. Вибирають вектор моніторингу з найменшою похибкою прогнозування на час прийняття рішення щодо оперативного втручання в роботу електропривода. Рішення про відключення електродвигуна від мережі приймають за прогнозними значеннями квадратів діючих значень еквівалентних струмів двовимірного інформаційного ряду. Визначення гранично припустимих значень сум квадратів струмів в кожному елементі двовимірного часового ряду проводять, наприклад, виходячи з рекомендацій для реле з залежною витримкою часу, час відключення якого зменшується відповідно до збільшення характеристичної величини (ГОСТ 27918-88, п.3.5.2.). Гранично допустиме значення сум квадратів струмів n-ного елемента пам'яті часового ряду дорівнює: I n 1 2 еквn 2 / n I ном ( К / nt ) 1 , де n - порядковий номер елемента пам'яті часового ряду, I ном - номінальний струм 30 електродвигуна, К - постійна величина, t ddyj- період дискретизації. Далі відомими способами прогнозують майбутні значення квадратів струмів електродвигуна за допомогою вектора моніторингу з найменшою похибкою прогнозування. Порівнюють прогнозні квадрати діючих значень еквівалентних струмів в елементах двовимірного часового ряду з їх гранично припустимими значеннями. При виході прогнозного значення, хоча би в 3 UA 117170 U 5 10 15 20 25 одному з елементів двовимірного часового ряду за межі припустимого, приймають рішення про включення попереджувальної сигналізації, відключення електродвигуна від мережі живлення або інших оперативних втручаннях. Спосіб забезпечує підвищення надійності, а також задану точність спрацьовування захисту, як при частих пусках, так і при значних короткочасних та малих тривалих перевантаженнях електродвигуна при стохастичній зміні кратності та експозиції, шляхом підвищення точності прогнозування нестаціонарних рядів на час прийняття рішення для вчинення попереджувальних дій. Джерела інформації: 1. Патент України на корисну модель № 42964 U, МПК (2009) Н02Н 7/08. Дубовик В.Г., Лебедев Л.М. "Спосіб захисту електродвигуна", опубл. 27.07.2009. 2. Патент України на корисну модель №43034 U, МПК (2009) Н02Н 7/08. Дубовик В.Г., Лебедев Л.М., Розен В.П. "Спосіб захисту електродвигуна", опубл. 27.07.2009. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб захисту електродвигуна з використанням тривимірних векторів моніторингу, що включає формування двовимірного часового ряду з часткових сум квадратів діючих значень струмів електродвигуна, поділених на кількість доданків часткових сум, формування решітчастого інформаційного поля за допомогою ортогональних векторів вкладень до двовимірною часового ряду, прийняття рішення про видачу попереджувального сигналу або відключення електродвигуна від мережі живлення при перевищенні прогнозним значенням в будь-якому з елементів двовимірного часового ряду гранично припустимого рівня, який відрізняється тим, що спочатку формують двовимірне решітчасте інформаційне поле за допомогою двовимірних ортогональних векторів вкладень, далі формують одновимірні вектори вкладень до решітчастого інформаційного поля і створюють тривимірні вектори моніторингу з інформаційними вузлами в вигляді куба, а ортогональні та діагональні інформаційні осі перехрещуються в його кутах, для захисту вибирають вектор моніторингу з найменшою похибкою прогнозування на час прийняття рішення. 30 Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюDubovyk Volodymyr Hryhorovych, Lebediev Lev Mykolaiovych
Автори російськоюДубовик Владимир Григорьевич, Лебедев Лев Николаевич
МПК / Мітки
МПК: H02H 7/08
Мітки: спосіб, електродвигуна, векторів, моніторингу, використанням, тривимірних, захисту
Код посилання
<a href="https://ua.patents.su/6-117170-sposib-zakhistu-elektrodviguna-z-vikoristannyam-trivimirnikh-vektoriv-monitoringu.html" target="_blank" rel="follow" title="База патентів України">Спосіб захисту електродвигуна з використанням тривимірних векторів моніторингу</a>
Спосіб захисту електродвигуна з використанням векторів моніторингу

Номер патенту: 116392
Опубліковано: 25.05.2017
Автори: Лебедєв Лев Миколайович, Демчик Ярослав Михайлович, Докшина Софія Юріївна, Дубовик Володимир Григорович
МПК: H02H 7/08
Мітки: спосіб, захисту, векторів, моніторингу, використанням, електродвигуна
Формула / Реферат:
Спосіб захисту електродвигуна з використанням векторів моніторингу, що включає формування двовимірного часового ряду з часткових сум квадратів діючих значень струмів електродвигуна, поділених на кількість доданків часткових сум, формування решітчастого інформаційного поля за допомогою одновимірних ортогональних векторів вкладень двовимірного часового ряду, прийняття рішення про видачу попереджувального сигналу або відключення електродвигуна...
Спосіб захисту електродвигуна з використанням двовимірних векторів моніторингу
Номер патенту: 117169
Опубліковано: 26.06.2017
Автори: Дубовик Володимир Григорович, Тарасюк Артем Петрович, Демчик Ярослав Михайлович, Лебедєв Лев Миколайович
МПК: H02H 7/08
Мітки: захисту, електродвигуна, векторів, моніторингу, двовимірних, спосіб, використанням
Формула / Реферат:
Спосіб захисту електродвигуна з використанням двовимірних векторів моніторингу, що включає формування двовимірного часового ряду з часткових сум квадратів діючих значень струмів електродвигуна, поділених на кількість доданків часткових сум, формування решітчастого інформаційного поля за допомогою ортогональних векторів вкладень, прийняття рішення про видачу попереджувального сигналу або відключення електродвигуна від мережі живлення при...
Спосіб захисту електродвигуна від перевантажень
Номер патенту: 101343
Опубліковано: 10.09.2015
Автори: Ковальчук Артур Олегович, Лебедєв Лев Миколайович, Липський Михайло В'ячеславович, Дубовик Володимир Григорович
МПК: H02H 7/08
Мітки: спосіб, захисту, перевантажень, електродвигуна
Формула / Реферат:
Спосіб захисту електродвигуна від перевантажень, що включає вимірювання струмів електродвигуна, визначення значень їх квадратів струмів, формування часового ряду часткових сум квадратів струмів, видалення останнього значення цього часового ряду при надходженні чергового значення квадрата струму електродвигуна, зміщення на крок вперед складових усіх елементів часового ряду, встановлення на перше місце часового ряду нового виміряного значення...
Спосіб захисту електродвигуна
Номер патенту: 42964
Опубліковано: 27.07.2009
Автори: Лебедєв Лев Миколайович, Дубовик Володимир Григорович
МПК: H02H 7/08
Мітки: захисту, електродвигуна, спосіб
Формула / Реферат:
Спосіб захисту електродвигуна, що включає безперервне вимірювання струму електродвигуна, відключення електродвигуна від мережі при перевищенні гранично допустимої тривалості струмового перевантаження в будь-якій з n-контрольованих точок, який відрізняється тим, що струм електродвигуна підносять до квадрата, часовий ряд квадратів струму електродвигуна записують в елементи пам'яті часового ряду заданої довжини і дискретності, при надходженні...
Спосіб захисту електродвигуна від струмових перевантажень
Номер патенту: 101074
Опубліковано: 25.08.2015
Автори: Захарчук Олександр Олегович, Лебедєв Лев Миколайович, Дубовик Володимир Григорович, Поворознюк Ольга Михайлівна
МПК: H02H 7/085, H02H 7/08
Мітки: електродвигуна, перевантажень, струмових, спосіб, захисту
Формула / Реферат:
Спосіб захисту електродвигуна від струмових перевантажень, що включає вимірювання струмів електродвигуна, визначення значень їх квадратів, формування часового ряду часткових сум квадратів струмів, видалення останнього значення цього часового ряду при надходженні чергового значення квадрата струму електродвигуна, зміщення на крок вперед складових усіх елементів часового ряду, встановлення на перше місце часового ряду нового виміряного...
Попередній патент: Спосіб захисту електродвигуна з використанням двовимірних векторів моніторингу
Наступний патент: Спосіб прогнозування ризику персистування бронхіальної астми у дітей із раннім дебютом захворювання
Випадковий патент: Відновний реактор з псевдозрідженим шаром і спосіб стабілізації псевдозрідженого шару у такому реакторі