Двохкоординатний скануючий цифроаналоговий перетворювач
Номер патенту: 12000
Опубліковано: 25.12.1996
Автори: Деркач Віталій Павлович, Власенко Валеріан Мойсійович, Райчев Едуард Павлович
Формула / Реферат
Двухкоординатный сканирующий цифроаналоговый преобразователь, содержащий блок сопряжения, интерфейсные входы и выходы которого подключены к одноименным входам и выходам ЭВМ, и для каждой из координат цифроаналоговый преобразователь, соединенный выходом с рабочим органом, отличающийся тем, что, с целью упрощения управления преобразователем от ЭВМ в него введены блок переключения регистров и для каждой координаты - первый и второй регистры, коммутатор и формирователь сигнала переходного состояния, вход которого подключен к входу цифроаналогового преобразователя, подключенного входом к выходу коммутатора, информационные и разрешающие входы регистров соединены с информационными и первыми управляющими выходами блока сопряжения, а выходы регистров - с первыми и вторыми информационными входами коммутатора, блок переключения регистров подключен управляющими и информационными входами соответственно к вторым управляющим и информационным выходам блока сопряжения, а первыми и вторыми управляющими выходами - к управляющим входам регистров и коммутатора соответственно первой и второй координат, причем первый и второй разрешающие входы блока переключения регистров соединены сооответственно с первым и вторым входами сигнала состояния и с выходами формирователей сигналов переходного состояния первой и второй координат.
Текст
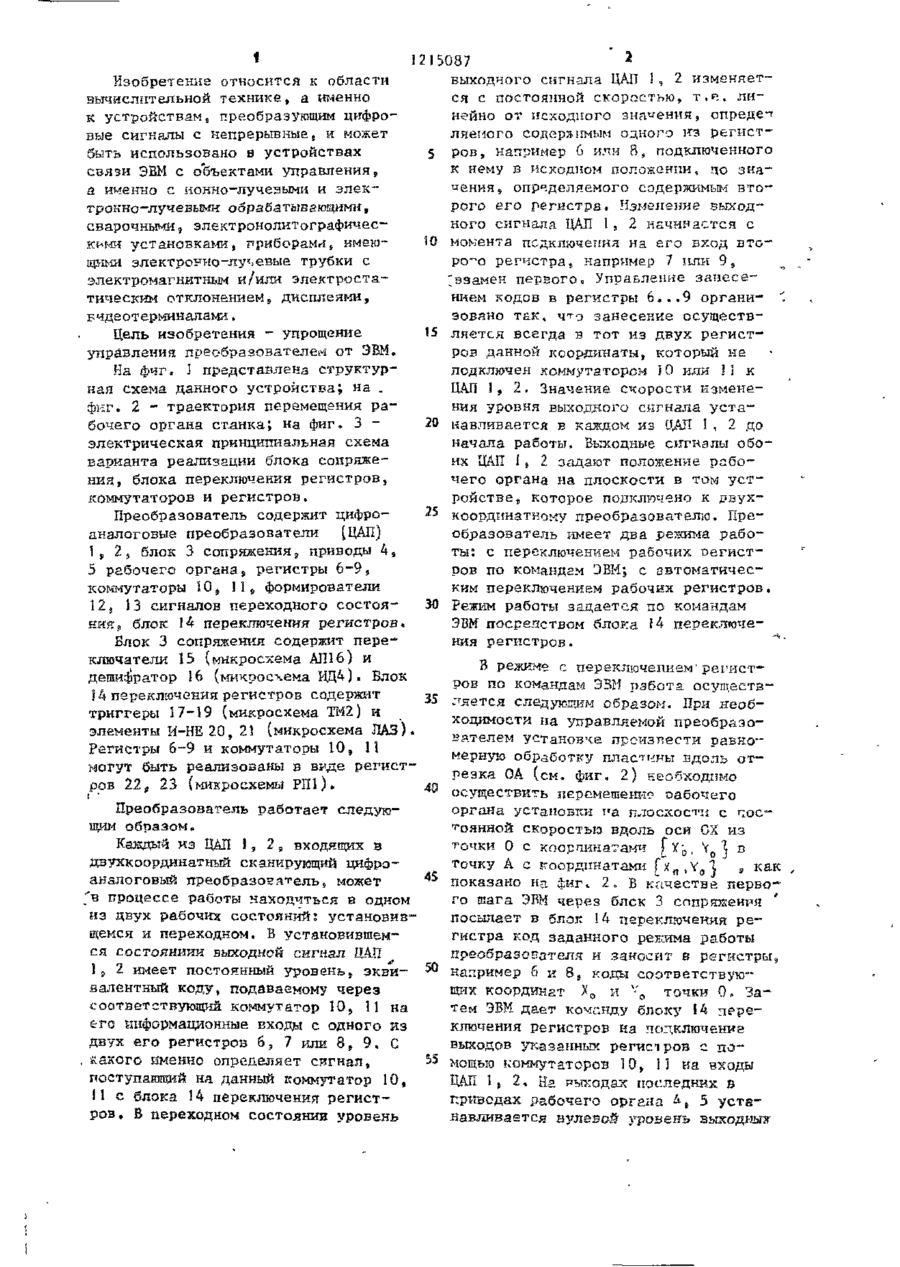
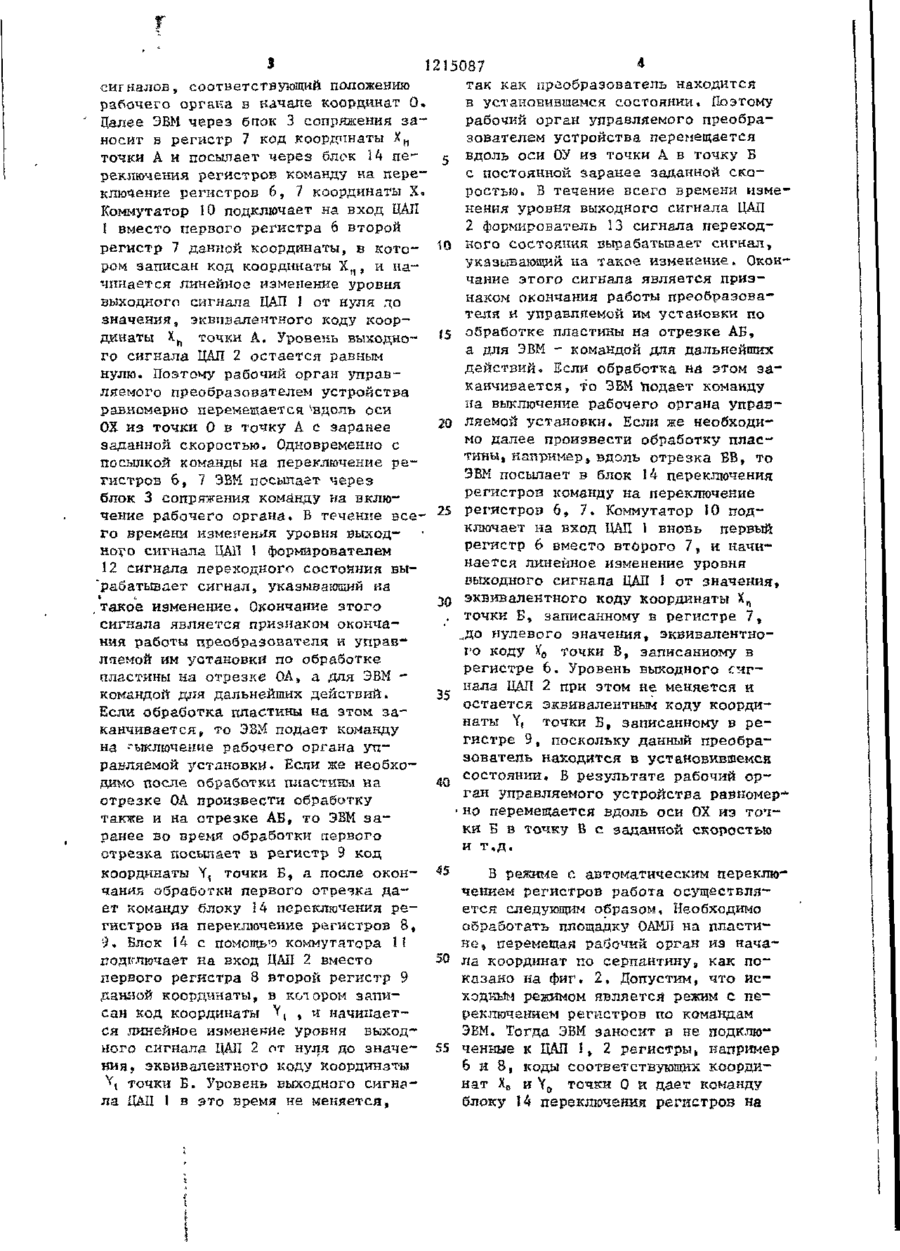
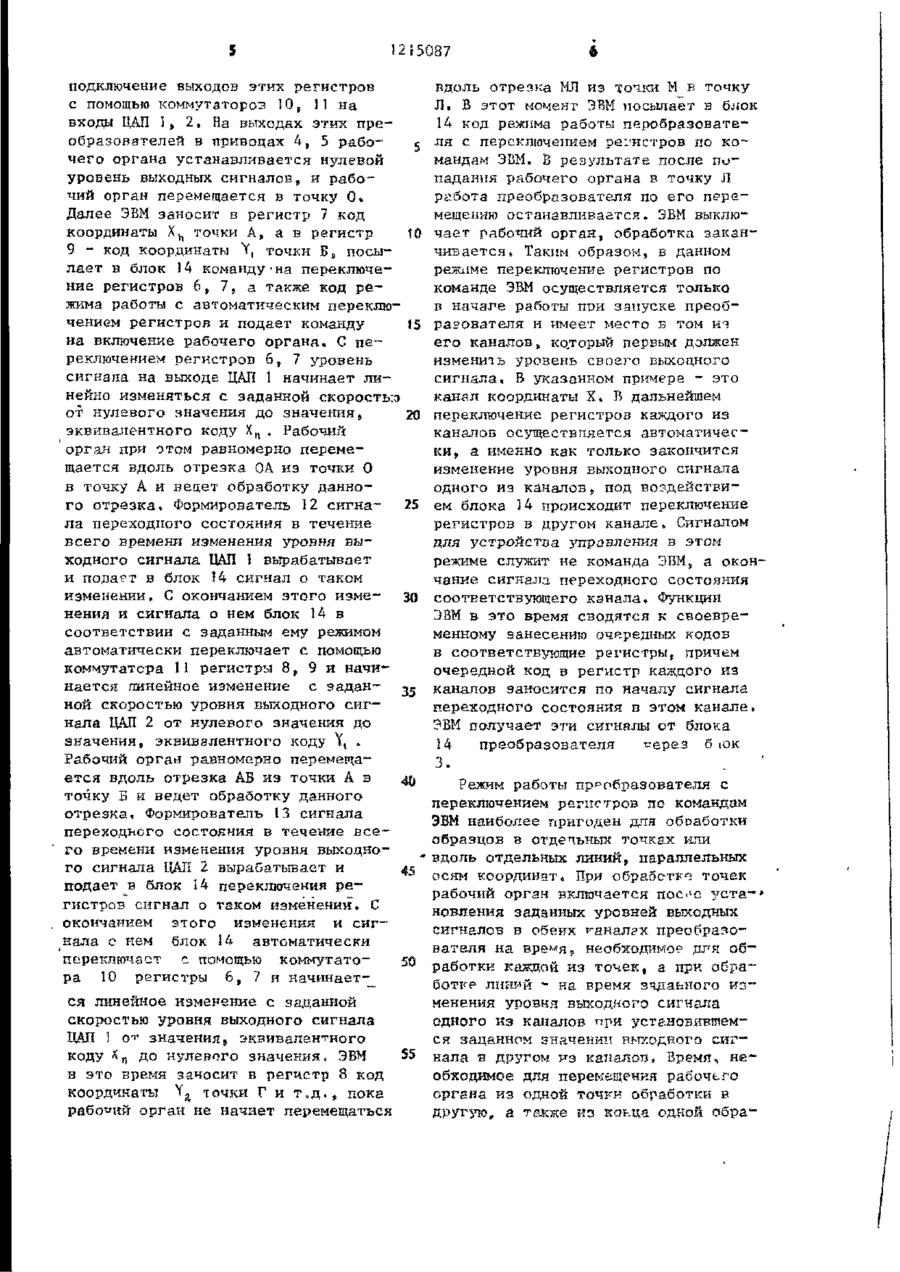
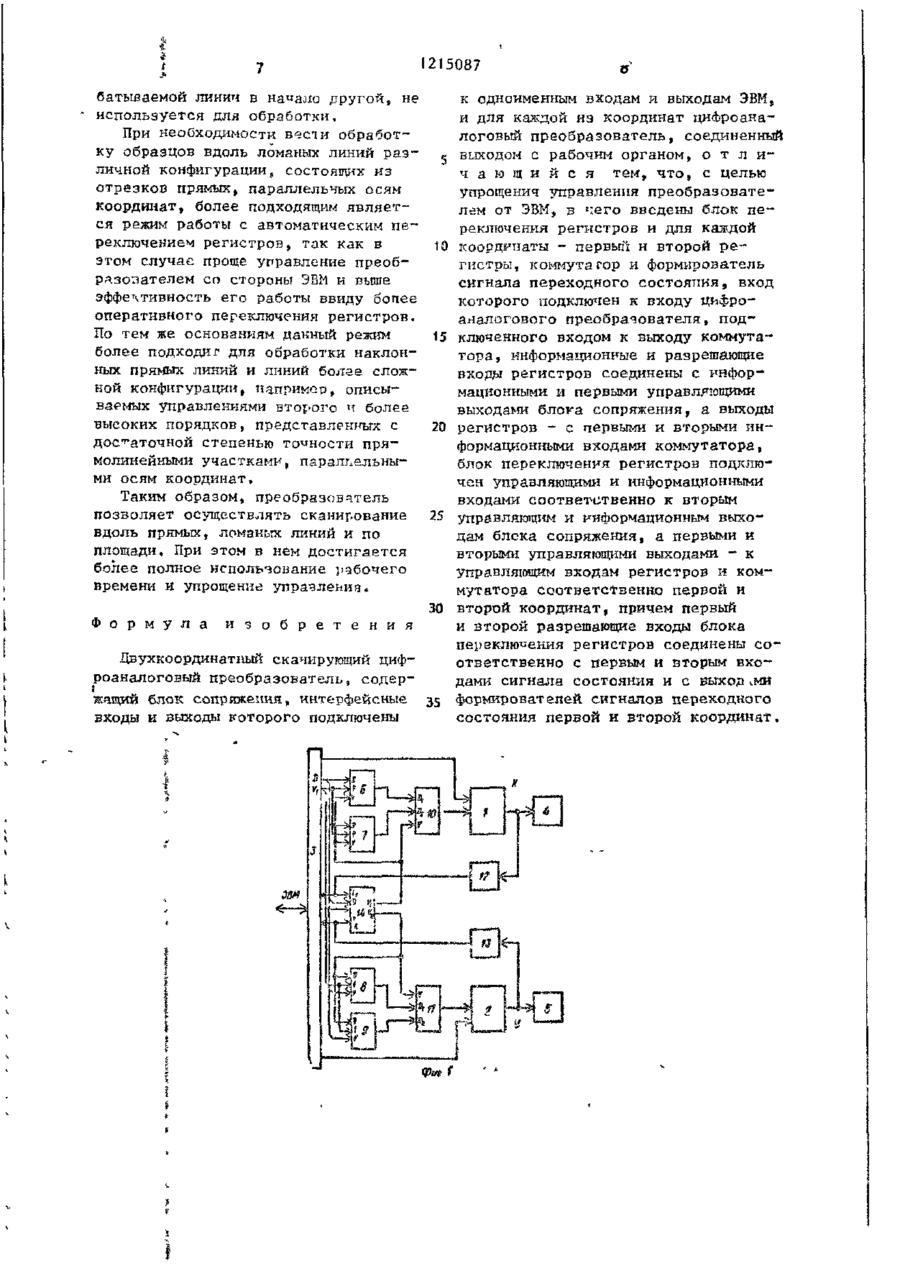
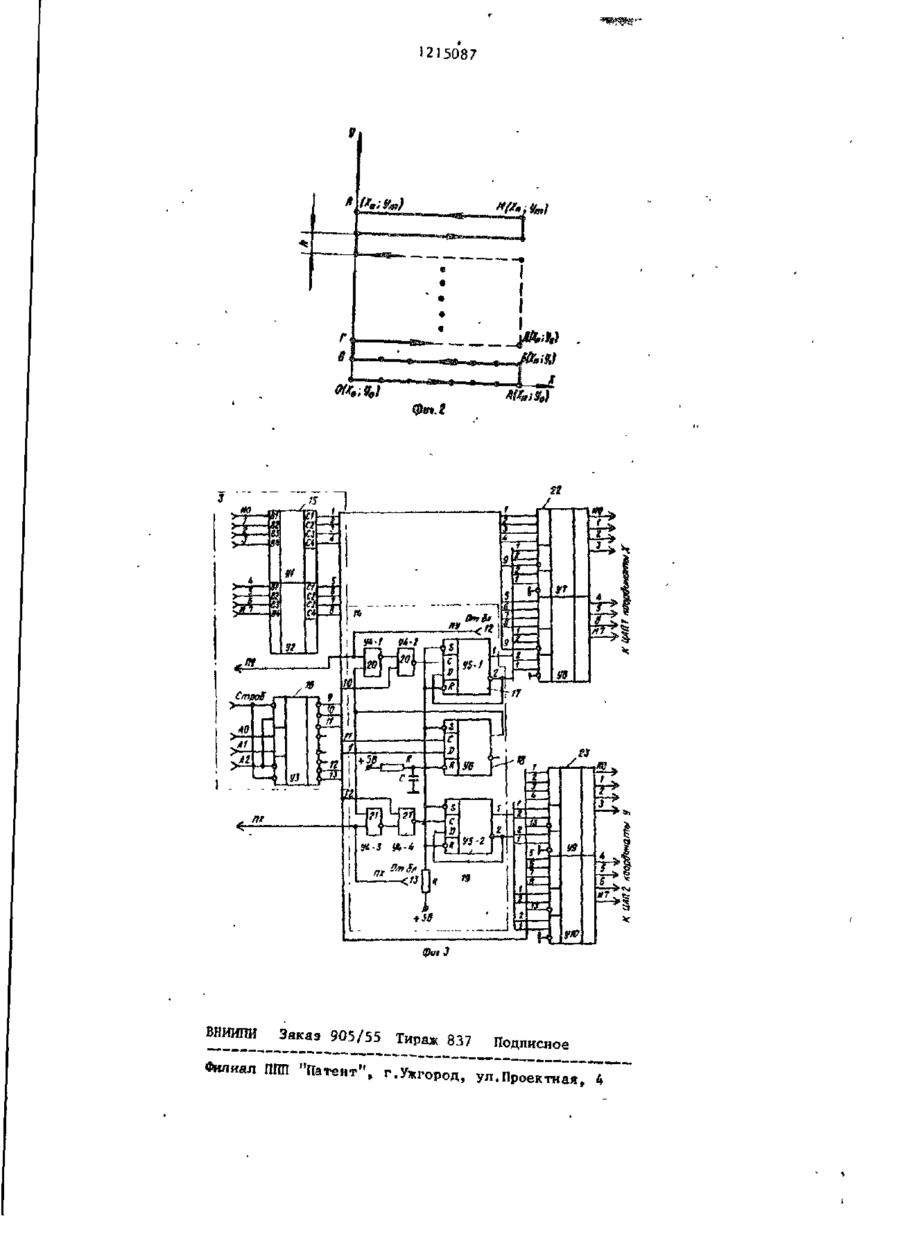
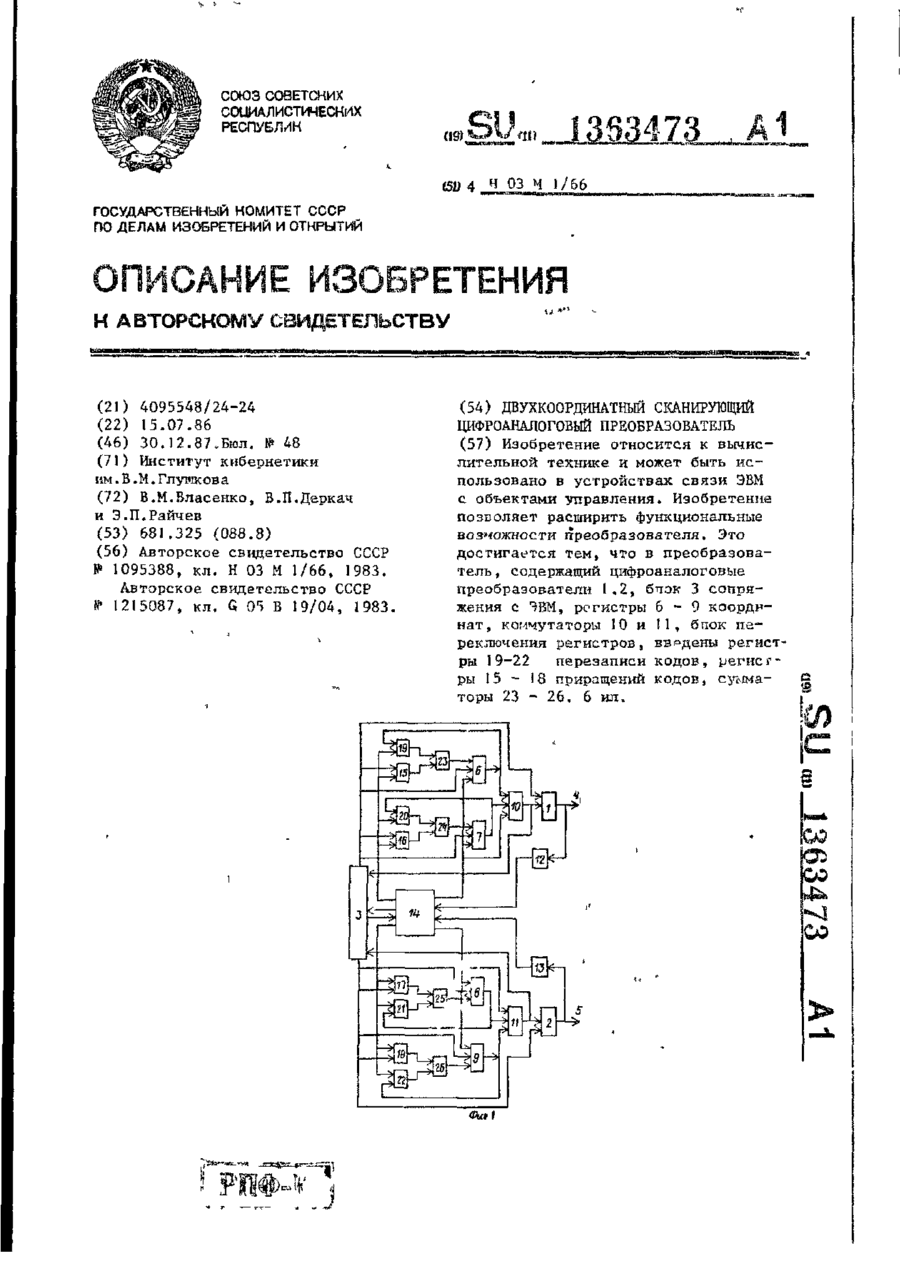
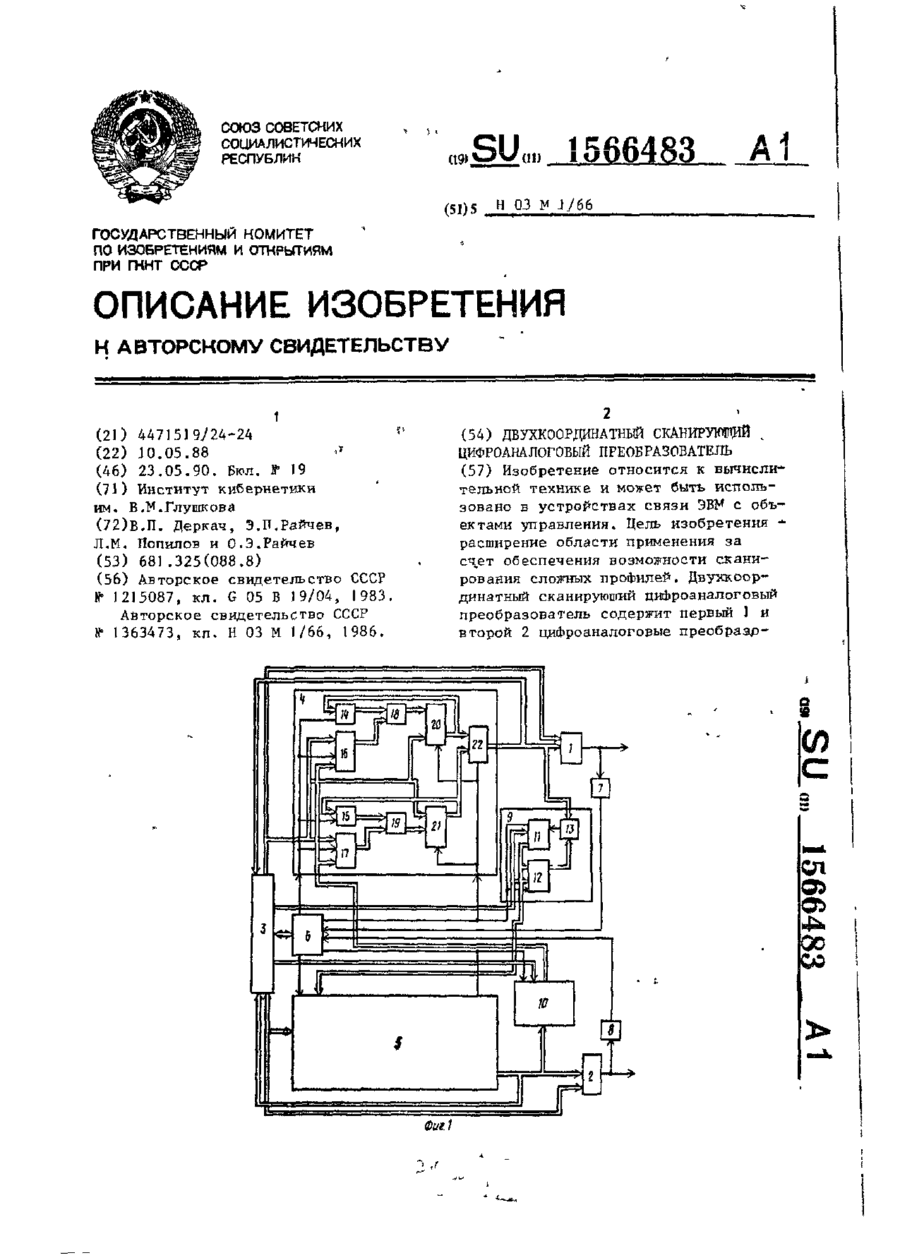
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в устройствах связи ЭВМ с объектами управле ния» а именно с ионно-лучевыми я электронно-лучевыми обрабатывающими, сварочными, электронолитографическими установками. Устройство решает задачу упрощения управления преобразователем от ЭВМ путем исключения большого количества расчетных и управляющих операций, выполняемых ЭВМ « при переходе между смежными точками траектории рабочего органа» ЭВМ достаточно выдать на преобразователь коды начальной и конечной точек линии, включить рабочий орган в начальной точке и выключить в конечной. Это достигается с помощью цифроаиалоговых преобразователей (ЦАП), имеющих линейно-изменяющийся ВЬІХОДНС'Ї сигнал по каждой из кооординат. Коды на ЦАП подаются из ЭВМ через блок сопряжения и два регистра, попеременно подключаемых к входу ЦАП с помощью блока переключения регистров. Момент окончания изменения сигнала на выходе ПАП фиксируется с помощью формирователя сигнала переходного состояния, выходной сигнал которого передается через блок сопряжения в ЭВМ для инициирования задания координат следующей точки на траектория перемещения рабочего органа- 3 ил. s I 215087 Изобретение относится к области вычислительной технике, а именно к устройствам( преобразующим цифровые сигналы с непрерывные, и может быть использовано в устройствах связи ЭВМ с о'бъектами управления, а именно с ионно-лучезыми и зяектронно—лучевыми обрабатывающими, сварочными, электроколитографическьми установками, гфиборамл* имеющими электронно-лучевые трубки с электромагнитным и/или электростатическим отклонениемs дисплеями, видеотерминалами. Цель изобретения - упрощение управления преобразователем от ЭВМ. На фчг* I представлена структурная схема данного устройства; на . фиг, 2 - траектория перемещения рабочего органа ст-анка; на фиг. З ~ электрическая принципиальная схема варианта реализации блока сопряжения, блока переключения регистров, коммутаторов и регистров. Преобразователь содержит цифроаналоговые преобразователи (ЦАП) 1, 2 5 блок 3 сопряжения, приводы 4, 5 рабочего органаs регистры 6-9, коммутаторы 10s 11 „ формирователи 12s 13 сигналов переходного состояния j блок 14 переключения регистров. Блок 3 сопряжения содержит переключатели 15 (микросхема АП16) и дешифратор 16 (микросхема ИД4). Блок ! 4 переключения регистров содержит триггеры 17-19 (микросхема ТМ2) и элементы М-НЕ20, 21 (микросхема ЛАЗ). Регистры 6-9 и коммутаторы 10, И могут быть реализованы в виде регистров 22 г 23 {микросхемы Р Ш ) . 5 10 15 20 25 30 l выходного сигнала ЦАП 1, 2 изменяется с постоянной скоростью, т.е. линейно от исходного значения, опреде-г ляемого содержимым одного из регистров, например б или 8 S подключенного к нему в исходном положении, цо значения, определяемого содержимым второго его регистра. Изменение выходного сигнала ЦАП 1» 2 начинается с момента подключения на его вход второго регистра„ например 7 іши 9, 'взамен перзогс Управление занесеJ нием кодов в регистры 6...9 органи- эовяно так, ч^э занесение осуществляется всегда в тот из двух регистров данной координаты, который не подключен коммутатором Ї0 или П к ЦАП 1, 2, Значение скорости изменения уровня выходного сигнала устанавливается в каждом из ЦАЛ I, 2 до начала работы. Выходные сигналы обоих ЦАП 1, 2 задают положение рабочего органа на плоскости в том устройстве, которое подключено к двухкоординатному преобразователю. Преобразователь имеет два режима работы: с переключением рабочих тэегистров по командам ЭВМ; с автоматическим переключением рабочих регистров, Режим работы задается по командам ЭВМ посредством блока 14 переключения регистров. 3 режиме с переключением1регистров по командам ЭВМ работа осущестз35 ляется следующим образом. При необходимости на управляемой преобразователем установче произвести равномерную обработку пластины вдоль отрезка 0А (см. фиг, 2) необходимо 40 осуществить перемещение оабочего Преобразователь работает следуюоргана установки иа плоскости с посщим образом. тоянной скоростыэ вдоль оси ОХ из Каждый из ЦАП 1, 2, входящих в точки 0 с координатами fx'D. ^ 0 } в двухкоординатный сканирующий цифротечку А с координатами [ х п > У 0 ] , как аналоговый преобразоня^ель, может показано на фиг і 2, В качестве перво"в процессе работы находиться в одном го шага ЭВМ через блек 3 сопряжения из двух рабочих состояний: установивпосылает в блок 14 переключения решемся и переходном. В установившемгистра код заданного режима работы ся состояниии выходной сигнал ЦДЛ преобразователя и закосит в регистры., 1 г 2 имеет постоянный уровеньt экви- 50 например б и 8„ коды соответствуювалентный коду, подаваемому через щих координат %0 и у'о точки 0» Засоответствующий коммутатор 10, 11 на тем ЭВМ дает команду блоку І4 переего информационные входы с одного из ключения регистров на подключение двух его регистров 6, 7 или 8 1 9 . С выходов указанных регисл ров с по, какого именно определяет сигнал, мощью коммутаторов 10 ^ 11 на входы поступающий на данный коммутатор 10, ЦАЛ 3, 2, На рыходах последних в И с блока 14 переключения регистприводах рабочего органа & в 5 устаров. В переходном состоянии уровень навливается нулевой уровень выходных з 4 1215087 так как преобразователь находится сигналов, соответствующий положению в установившемся состоянии. Поэтому рабочего органа в начале координат О рабочий орган управляемого преобра1 Цалее ЭВМ через бгсок 3 сопряжения за зователем устройства перемещается носит в регистр 7 код координаты Х п вдоль оси ОУ из точки А в точку Б 5 точки А и посылает через блок 14 пес постоянной заранее заданной ско1 реключения регистров команду на пере ростью. В течение всего времени измекяючеиие регистров 6, 7 координаты X нения уровня выходного сигнала ЦАП Коммутатор Ю подключает на вход ЦДЛ 2 формирователь 13 сигнала переходI вместо первого регистра 6 второй 10 него состояния вырабатывает сигнал» регистр 7 данной координаты, в котоуказывающий на такое изменение. Оконром записан код координаты Х п , и начание этого сигнала является призчинается линейное изменение уровня наком окончания работы преобразовавыходного сигнала ЦАП І от нуля до теля и управляемой им установки по значения, эквивалентного коду координаты Xh точки А. Уровень выходно- (5 обработке пластины на отрезке А Б 5 а для ЭВМ - командой для дальнейших го сигнала ЦАП 2 остается равным действий. Если обработка на этом занулю. Поэтому рабочий орган управканчивается, то ЭВМ подает команду ляемого преобразователем устройства на выключение рабочего органа управравномерно перемещается '•вдоль оси 20 ляемой установки. Если же необходиОХ из точки 0 в точку А с заранее мо далее произвести обработку пласзаданной скоростью. Одновременно с тины, например, вдоль отрезка БВ, то посылкой команды на переключение реЭВМ посылает в блок 14 переключения гистров 6, 7 ЭВМ посылаат через регистроа команду на переключение блок 3 сопряжения команду на вклю. 25 регистров 6, 7. Коммутатор 10 подчение рабочего органа. В течение всеключает на вход ЦАП 1 вновь первый го времени изменения уровня выходрегистр 6 вместо второго 7, и начи: ного сигнала ЦАП \ формирователем нается линейное изменение уровня 12 сигнала переходного состояния вывыходного сигнала ЦАП І от значения, рабатывает сигнал, указывавший на 3Q эквивалентного коду координаты Х„ такое изменение. Окончание этого . точки Б» записанному s регистре 7, сигнала является признаком оконча^до нулевого значения, эквивалентнония работы преобразователя и управ" го коду Уо точки В, записанному в лаемой им установки по обработке регистре 6. Уровень выходного енгпластины на отрезке ОА, а для ЭВМ нала ЦАТЕ 2 при этом не меняется и командой для дальнейших действий. остается эквивалентным коду коордиЕсли обработка пластины на этом занаты Y, точки Б, записанному в реканчивается,, то ЭВМ подает команду гистре 9, поскольку данный преобрана "ыключение рабочего органа уп~ зователь находится в установившемся ранляемой з^становки. Если же необхосостоянии. В результате рабочий орад димо после обработки пластины на ган управляемого устройства равномер* отрезке ОА произвести обработку • но перемещается вдоль оси ОХ из точтакже и на отрезке АБ» то ЭВМ заки Б в точку В с заданной скоростью ранее во время обработки первого и т.д. отрезка посылает в регистр 9 код координаты Y, точки Б, а после окон- ^ 5 В режиме с автоматическим переключания обработки первого отрезка дачением регистров работа осуществляет команду блоку 14 переключения реется следующим образом. Необходимо гистров на переключение регистров 8, обработать площадку ОАНЛ на пласти9. Блок 14 с помощь'э коммутатора 11 не, перемещая рабочий орган из начаподключает на вход ЦАП 2 вместо 50 ла координат по серпантину, как попервого регистра 8 второй регистр 9 казано на фиг. 2, Допустим, что исданії ой координаты, в которой запих о д к Ш режимом является режим с песан код координаты V, , и начинаетреключением регистров по командам ся линейное изменение уровня выходЭВМ. Тогда ЭВМ заносит s не подклю~ ного сигнала ЦАП 2 от нуля до значе55 чениые к ЦАП l s 2 регистры* например ния, эквивалентного коду координаты 6 и 8, коды соответствующих коорди\ точки Б. Уровень выходного сигнанат Хо и Y o точки 0 и дает команду ла ІШІ 1 в это время не меняется, блоку 14 переключения регистров на 2 і 5087 подключение выходов этих регистров с помощью коммутаторов ]09 11 на входы ЦАП І ( 2, На выходах этих преобразователен в приводах 4, 5 рабос чего органа устанавливается нулевой уровень выходных сигналов„ и рабочий орган перемещается в точку 0. Далее ЭВМ заносит в регистр 7 код координаты X h точки А, а в регистр 10 9 - код координаты Ї, точки B s посылает в блок 14 команду-на переключение регистров 6, 7, а также код режима работы с автоматическим переключением регистров и подает команду 15 на включение рабочего органа, С переключением регистров 6, 7 уровень сигнала на выходе ЦАП 1 начинает линейно изменяться с заданной скоростью от нулевого значения до значения> 20 эквивалентного коду Х п . Рабочий орган при отом равномерно перемещается вдоль отрезка ОА из точки О в точку А и вецет обработку данного отрезка. Формирователь 12 сигна- 25 ла переходного состояния в течение всего времени изменения уровня выходного сигнала ЦАП 1 вырабатывает и подаст в блок 14 сигнал о таком изменении, С окончанием этого изме- зо нения и сигнала о нем блок 1А в соответствии с заданным ему режимом автоматически переключает с помощью коммутатора 11 регистры 8, 9 и начинается линейное изменение с задан- 35 ной скоростью уровня выходного сигнала ЦАП 2 от нулевого значения до значения в эквивалентного коду Y, . Рабочий органі равномерно перемещается вдоль отрезка АБ из точки А в 40 точку Б и ведет обработку данного отрезка* Формирователь 13 сигнала переходного состояния в течение всего времени изменения уровня выходного сигнала ЦАП 2 вырабатывает и 45 подает в блок 14 переключения регистров сигнал о таком изменении, С окончанием этого изменения и сигнала о нем блок 14 автоматически переключает с помощью коммутато50 ра 10 регистры 6, 7 и начинает-^ вдоль отрезка МЛ из точки М в точку Л. В этот момент ЭВМ посылает в блок 14 код режима работы перобразователя с переключением регистров по командам ЭВМ. В результате после попадания рабочего органа в точку Л работа преобразователя по его перемещению останавливается. ЭВМ выключает рабочий орган, обработка заканчивается» Таким образом, в данном режиме переключение регистров по команде ЭВМ осуществляется только в начале работы при запуске преобразователя и имеет место в том иі его каналов > ко.торый первым должен изменить уровень своего выходного сигнала. В указанном примере - это канал координаты X. В дальнейшем переключение регистров каждого из каналов осуществпяется автоматически, а именно как только закончится изменение уровня выходного сигнала одного из каналов, под воздействием блока 14 происходит переключение регистров в другом канале. Сигналом для устройства управления з этом режиме служит не команда ЭВМ, а окончание сигнала, переходного состояния соответствующего канала. Функции ЭВМ в это время сводятся к своевременному занесению очередных кодов в соответствующие регистры, причем очередной код в регистр каждого из каналов заносится по началу сигнала переходного состояния в этом канале, ЭВМ получает эти сигналы от блока т Ї4 преобразователя --ерез б іок 3. . Режим работы преобразователя с переключением регистров по командам ЭВМ наиболее пригоден для обработки образцов в огдепьных точках или вдоль отдельных линий, параллельных осям координат. При обработка точек рабочий орган включается посио уста-' нетления заданных уровней выходных сигналов в обеих каналах преобразователя на вре^я j необходимое др-к об, работки каждой из точек, а при обра~ 6 O T F P лшдай - на время заданного изменения уровня выходного сигнала ся линейное изменение с заданной одного из каналов при установившемскоростью уровня выходного сигнала ся заданном значении внходного сигЦАП \ о1*1 значения9 эквивалентного коду %п до нулевого значения, ЭВМ S5 нала в другом Ї*З каналов. Время-, необходимое для перемещения рабочего в это время заносит в регистр 8 код ергйна из одной точки обработки в координаты Y a точки Г и т.д.» пока другую, а также из каьц» одной обрарабочий орган не начнет перемещаться 215087 батываемой ликич в начало другой, не к одноименным входам и выходам ЭВМ, используется для обработки. и для каждой яз координат циброанаПри необходимости вести обработлоговый преобразователь, соединенный ку образцов вдоль ломаных линий раз- , выходом с рабочим органом, о т л и . личной конфигурации, состоящих из ч а ю щ и й с я тем, что, с целью отрезков прямых, параллельных осям упрощения управления преобразоватекоординат, более подходящим являетлем от ЭВМ, в чего введены блок песя режим работы с автоматическим переключения регистров и для каждой реключением регистров, так как в to координаты - первый и второй реэтом случае проще управление преобгистры, коммутатор и формирователь разователем со стороны ЭВМ и выше сигнала переходного состояния9 вход эффективность его работы ввиду более которого подключен к входу цьфрооперативного переключения регистров. аналогозого преобразователя, подПо тем же основаниям данный режим is ключенного входом к выходу коммутаболее подходит для обработки наклонтора, информационные и разрешающие ных прямых линий и линий более сложвходы регистров соединены с инфорной конфигурации, например, описымационными и первыми управляющими ваемых управлениями второго и более выходами блока сопряжения, а выходы высоких порядков, представленных с 20 регистров - с первыми и вторыми индостаточной степенью точности пряформационными входами коммутатора, молинейными участками, параллельныблок переключения регистров подклюми осям координат. чен управляющими и информационными входами соответственно к вторым Таким образом, преобразователь позволяет осуществлять сканирование 25 управляющим и информационным выходам блока сопряжения, а первыми и вдоль прямых, ломанглх линий и по вторыми управляющими выходами - к площади. При этом в нем достигается управляющим входам регистров и комболее полное использование рабочего мутатора соответственно первой и времени и упрощение управления. второй координат, причем первый 30 и второй разрешающие входы блока Ф о р м у л а и з о б р е т е н и я переключения регистров соединены соответственно с первым и вторым вхоДвухкоординатный сканирующий цифдами сигнала состояния и с выход ^ми роаналоговый преобразователь, содерформирователей сигналов переходкого жащий блок сопряжения» интерфейсные 35 состояния первой и второй координат. входы и выходы которого подключены 12J5087 (put З ВНИИТЇИ Заказ 905/55 Тираж 837 Подписное Филиал ШПЇ "Патент", г.Ужгород, ул,Проектная, 4
ДивитисяДодаткова інформація
Назва патенту англійськоюTwo-coordinate scanning digital-analog converter
Автори англійськоюVlasenko Valeria Moisiiovych, Derkach Vitalii Pavlovych, Raichev Eduard Pavlovych
Назва патенту російськоюДвухкоординатный сканирующий цифроаналоговый преобразователь
Автори російськоюВласенко Валериан Моисеевич, Деркач Виталий Павлович, Райчев Эдуард Павлович
МПК / Мітки
МПК: G05B 19/04
Мітки: цифроаналоговий, перетворювач, скануючий, двохкоординатний
Код посилання
<a href="https://ua.patents.su/6-12000-dvokhkoordinatnijj-skanuyuchijj-cifroanalogovijj-peretvoryuvach.html" target="_blank" rel="follow" title="База патентів України">Двохкоординатний скануючий цифроаналоговий перетворювач</a>
Двохкоординатний скануючий цифроаналоговий перетворювач
Номер патенту: 11999
Опубліковано: 25.12.1996
Автори: Власенко Валеріан Мойсійович, Райчев Едуард Павлович, Деркач Віталій Павлович
МПК: H03M 1/66
Мітки: перетворювач, скануючий, двохкоординатний, цифроаналоговий
Формула / Реферат:
Двухкоординатный сканирующий цифро-аналотовый преобразователь, содержащий блок сопряжения с ЭВМ, первый и второй выходы которого соединены соответственно с первыми входами коррекции первого и второго цифроаналоговых преобразователей, выход первого цифроаналогового преобразователя соединен с входом первого блока формирования сигналов переходного состояния и является первой выходной шиной, выход блока формирования сигналов переходного...
Двохкоординатний скануючий цифроаналоговий перетворювач
Номер патенту: 11998
Опубліковано: 25.12.1996
Автори: Деркач Віталій Павлович, Райчев Олег Едуардович, Райчев Едуард Павлович, Попілов Лев Матвійович
МПК: H03M 1/66
Мітки: двохкоординатний, скануючий, перетворювач, цифроаналоговий
Формула / Реферат:
1. Двухкоординатный сканирующий цифро-аналоговый преобразователь, содержащий блок сопряжения с ЭВМ, первые и вторые выходы которого подключены к соответствующим информационным входам соответственно первого и второго блоков формирования кодов координаты и к соответствующим входам коррекции соответственно первого и второго цифроаналоговых преобразователей, выходы которых соединены с входами соответственно первого и второго блоков...
Цифроаналоговий перетворювач
Номер патенту: 11997
Опубліковано: 25.12.1996
Автори: Райчев Едуард Павлович, Власенко Валеріан Мойсійович, Деркач Віталій Павлович
МПК: H03M 1/00
Мітки: цифроаналоговий, перетворювач
Формула / Реферат:
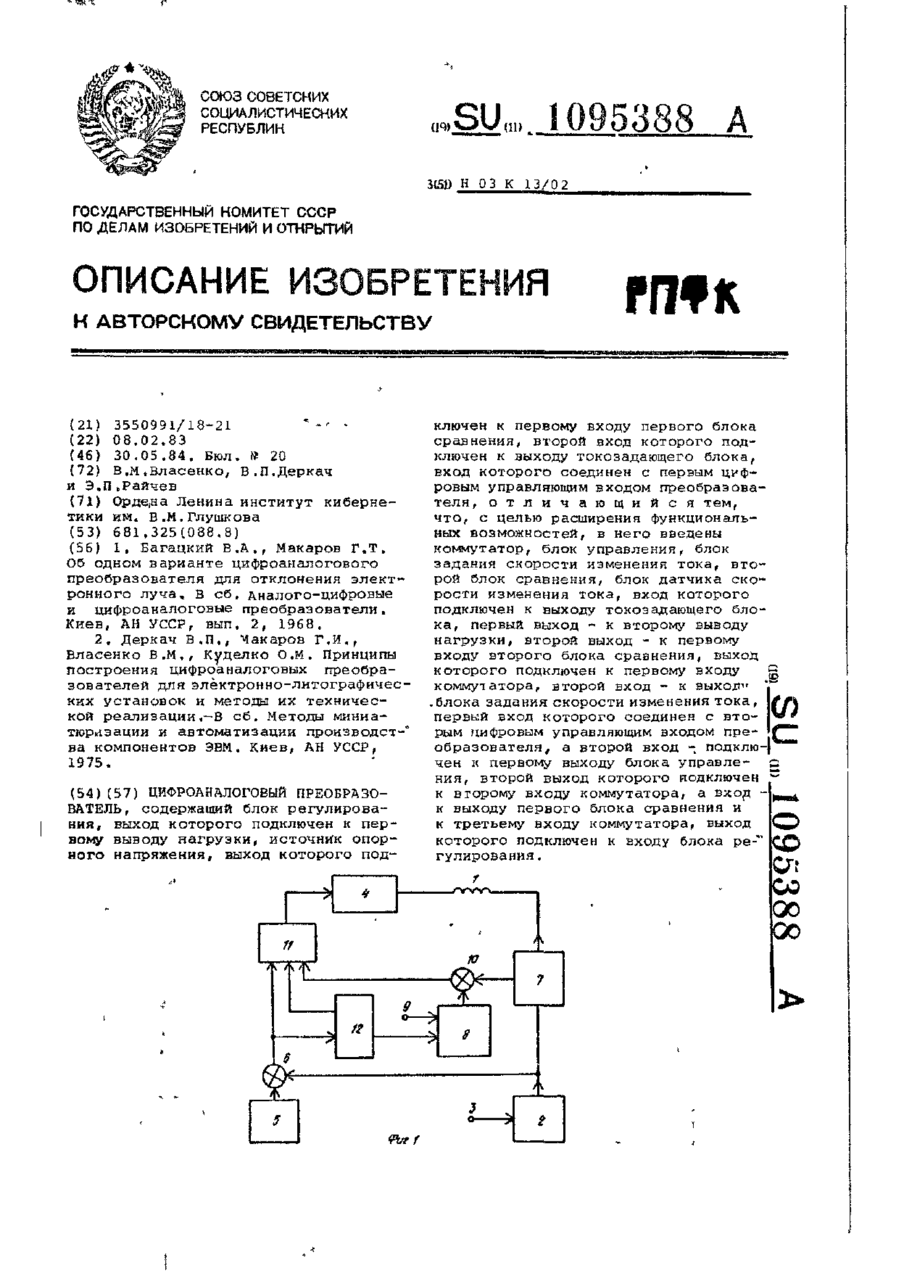
Цифроаналоговый преобразователь, содержащий блок регулирования, выход которого подключен к первому выводу нагрузки, источник опорного напряжения, выход которого подключен к первому входу первого блока сравнения, второй вход которого подключен к выходу токозадаюшего блока, вход которого соединен с первым цифровым управляющим входом преобразователя, отличающийся тем, что, с целью расширения функциональных возможностей, в него введены...
Багатоканальний цифроаналоговий перетворювач
Номер патенту: 1846
Опубліковано: 20.12.1994
Автор: Портнов Михайло Львович
МПК: H03M 1/66
Мітки: цифроаналоговий, багатоканальний, перетворювач
Формула / Реферат:
1. Многоканальный цифроаналоговый преобразователь, содержащий формирователь сигналов управления, генератор импульсов, блок приема, вход которого является входной информационной шиной, а информационный и управляющий выходы соединены соответственно с информационным и первым управляющим входами блока управления, т элементов памяти, выходы которых соединены с входами соответствующих канальных преобразователей на источниках тока, выходы...
Лазерний скануючий інфрачервоний пристрій
Номер патенту: 8236
Опубліковано: 29.03.1996
Автори: Хабалевський Юрій Анатолійович, Безмолитвенний Володимир Володимирович, Сидоров Василь Іванович
МПК: A61N 5/06
Мітки: інфрачервоний, пристрій, лазерний, скануючий
Формула / Реферат:
1. Лазерное сканирующее инфракрасное устройство, включающее лазерный излучатель, блок питания и таймер, отличающееся тем, что дополнительно введены программируемый блок управления, штатив, на котором установлены телевизионное видеоконтрольное устройство и блок излучателя, в корпусе которого подвижно закреплен лазер и установлены по ходу луча объектив и двухкоординатный оптический дефлектор, содержащий два зеркала на подложках,...
Попередній патент: Двохкоординатний скануючий цифроаналоговий перетворювач
Наступний патент: Спосіб визначення частотноі характеристики об’єкта, який випробовується та пристрій для його здійснення
Випадковий патент: Гідродинамічний кавітаційний реактор