Багатопараметровий протиюзний датчик
Номер патенту: 120249
Опубліковано: 25.10.2017
Автори: Могила Валентин Іванович, Ковтанець Максим Володимирович, Смірний Михайло Федорович, Горбунов Микола Іванович
Формула / Реферат
Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що перший інерційний вантаж виконано у вигляді втулки, пружну вставку закріплено між втулкою та другим інерційним вантажем, в секторних прорізах втулки та другого інерційного вантажу вмонтовано формувачі імпульсів, причому перетворювачі ємнісного або індуктивного типу встановлено з однаковим дотичним зазором до втулки та другого інерційного вантажу та підключено до блока визначення напрямку обертання осі, вихід якого з'єднаний з входами першого RS-тригера, виходи якого сполучено з першими входами першого та другого елементів І, другі входи яких зв'язано з одиничними виходами другого та третього RS-тригерів, входи яких перехресно підключено до перетворювачів ємнісного або індуктивного типу.
Текст
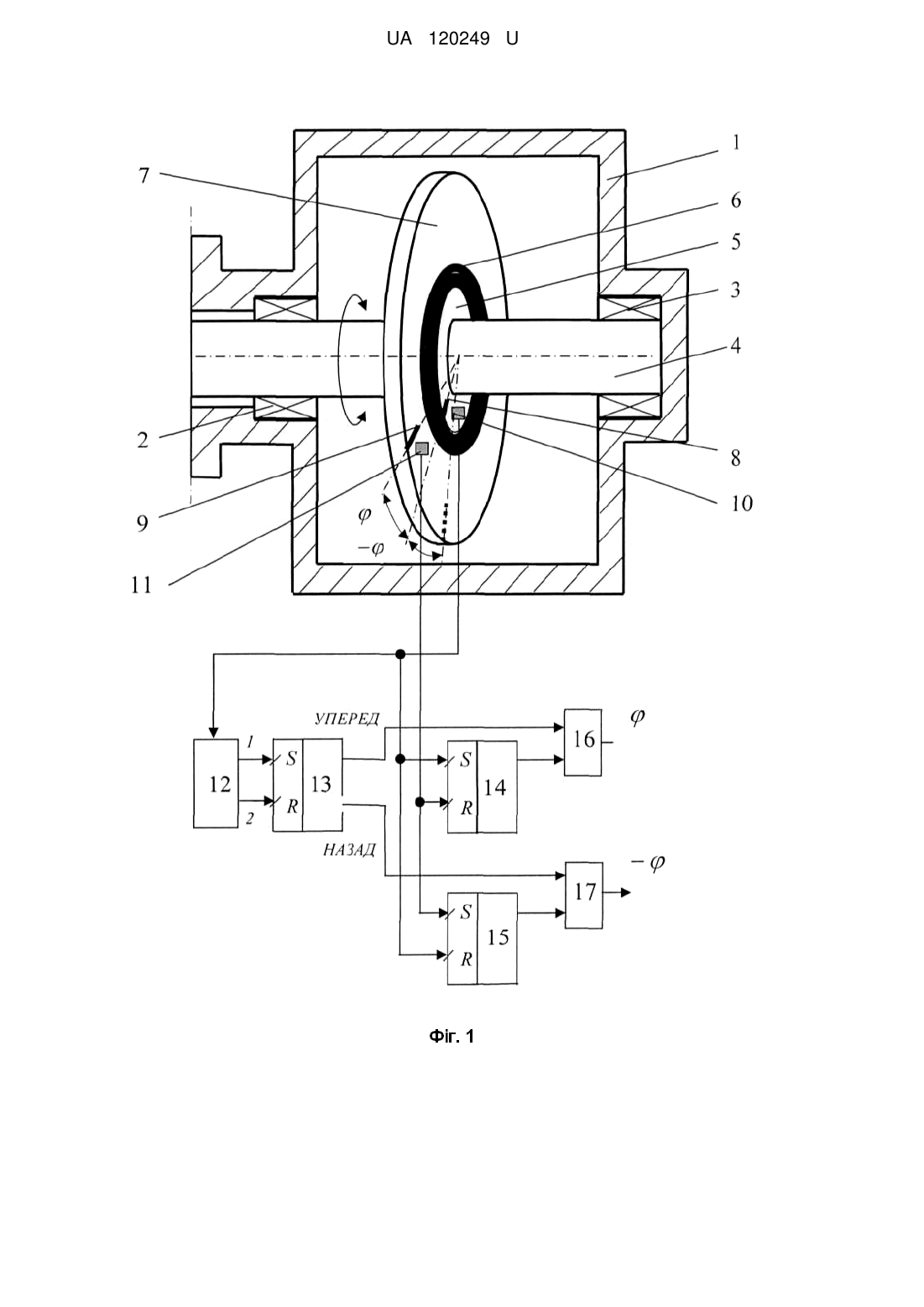
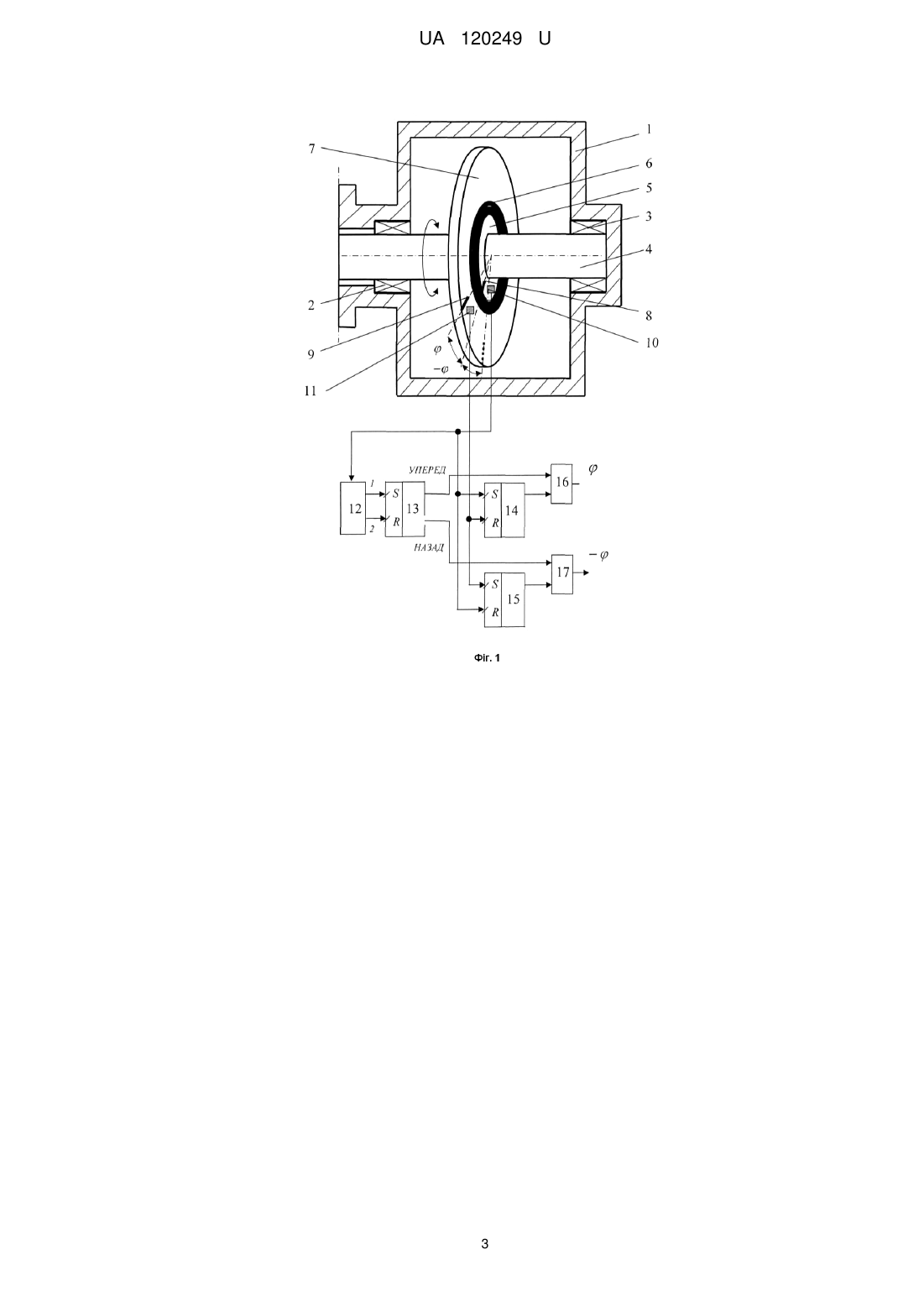
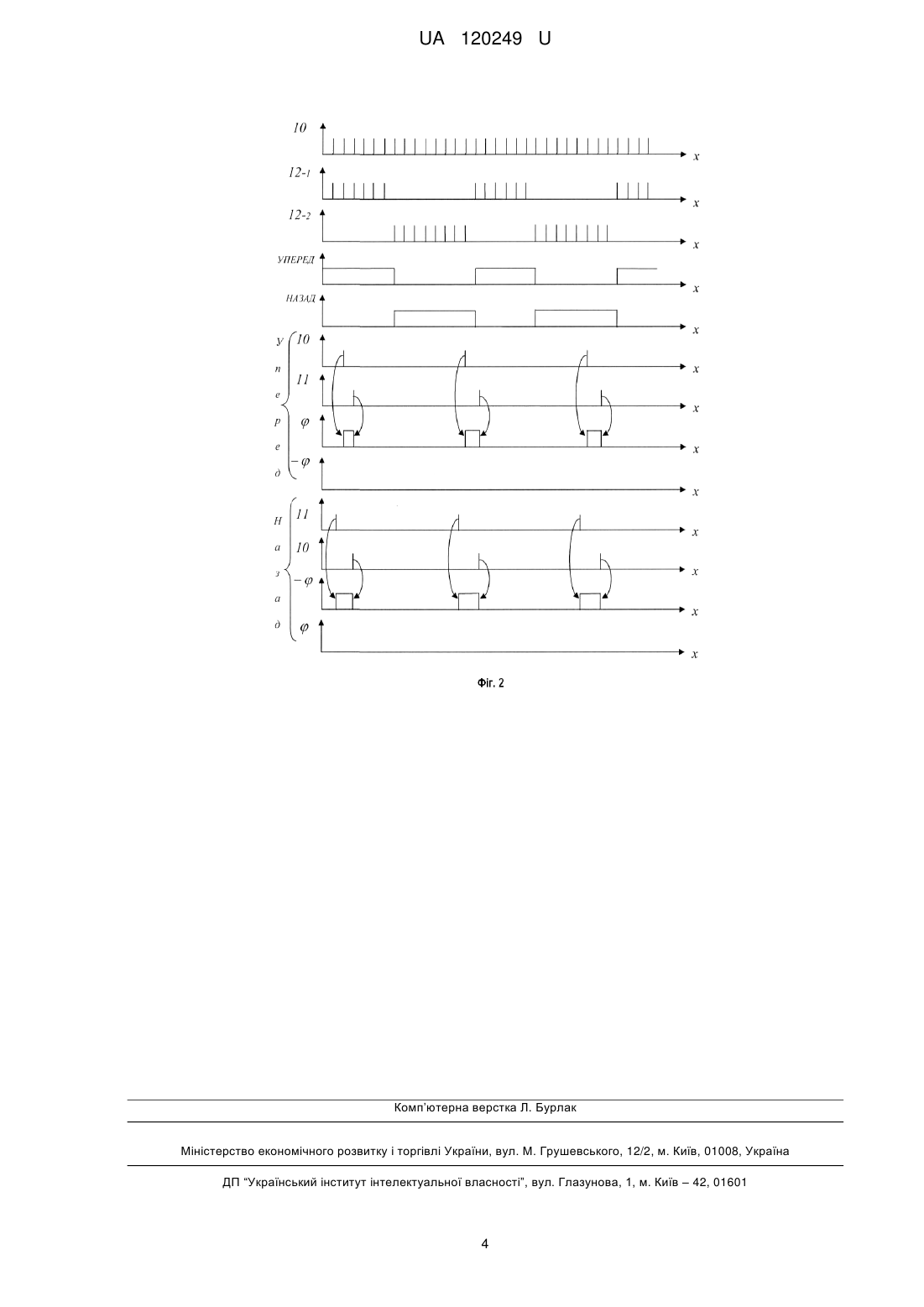
Реферат: Багатопараметровий протиюзний датчик містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач. Перший інерційний вантаж виконано у вигляді втулки, пружну вставку закріплено між втулкою та другим інерційним вантажем. В секторних прорізах втулки та другого інерційного вантажу вмонтовано формувачі імпульсів. При цьому перетворювачі ємнісного або індуктивного типу встановлено з однаковим дотичним зазором до втулки та другого інерційного вантажу та підключено до блока визначення напрямку обертання осі, вихід якого з'єднаний з входами першого RS-тригера, виходи якого сполучено з першими входами першого та другого елементів І, другі входи яких зв'язано з одиничними виходами другого та третього RS-тригерів, входи яких перехресно підключено до перетворювачів ємнісного або індуктивного типу. UA 120249 U (54) БАГАТОПАРАМЕТРОВИЙ ПРОТИЮЗНИЙ ДАТЧИК UA 120249 U UA 120249 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до залізничного транспорту, а саме до гальмового, протиюзного та протибуксувального обладнання одиниць транспортного складу, який працює з реверсивним характером руху. Відомий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано інерційний вантаж, положення якого фіксується механізмом із трьох кульок, розташованих у профільованих вирізах шайби, що розтискається пружиною корпусу штовхача з електричним контактним вмикачем, як інерційний вантаж застосовано два інерційні вантажі з радіально розташованими вікнами, як механізм застосовано пружний елемент і як електричний контактний вмикач застосовано безконтактний вмикач [див. патент України № 62169, МПК В60Т8/86, опубл. 15.12.2003, бюл. № 12]. Цей датчик вибрано за прототип. Недоліком відомого протиюзного датчика є те, що наявні інерційні вантажі з радіально розташованими вікнами та безконтактний вмикач не забезпечують вироблення більш інформативного сигналу керування, достатню надійність роботи датчика та його мінімальні масо-габаритні показники. В основу корисної моделі поставлено задачу вдосконалення багатопараметрового протиюзного датчика шляхом того, що перший інерційний вантаж виконано у вигляді втулки, пружну вставку закріплено між втулкою та другим інерційним вантажем, в секторних прорізах втулки та другого інерційного вантажу вмонтовано формувачі імпульсів, причому перетворювачі ємнісного або індуктивного типу встановлено з однаковим дотичним зазором до втулки та другого інерційного вантажу та підключено до блока визначення напрямку обертання осі, вихід якого з'єднаний зі входами першого RS-тригера, виходи якого сполучено з першими входами першого та другого елементів І, другі входи яких зв'язано з одиничними виходами другого та третього RS-тригерів, входи яких перехресно підключено до перетворювачів ємнісного або індуктивного типу, що дозволить докладно аналізувати умови розгону, гальмування та переходу коліс до руху юзом та буксування в обох напрямках обертання осі. Це розширить сферу застосування датчика, підвищить його надійність та мінімізує масо-габаритні параметри. Поставлена задача вирішується тим, що у багатопарамeтровому протиюзному датчику, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, згідно з корисною моделлю, перший інерційний вантаж виконано у вигляді втулки, пружну вставку закріплено між втулкою та другим інерційним вантажем, в секторних прорізах втулки та другого інерційного вантажу вмонтовано формувачі імпульсів, причому перетворювачі ємнісного або індуктивного типу встановлено з однаковим дотичним зазором до втулки та другого інерційного вантажу та підключено до блока визначення напрямку обертання осі, вихід якого з'єднаний зі входами першого RS-тригера, виходи якого сполучено з першими входами першого та другого елементів І, другі входи яких зв'язано з одиничними виходами другого та третього RS-тригерів, входи яких перехресно підключено до перетворювачів ємнісного або індуктивного типу. Суть корисної моделі пояснюється кресленням (фіг. 1), де зображено багатопараметровий протиюзний датчик, що містить корпус 1 зі вставленою в нього у підшипниках 2, 3 віссю 4, на яку насаджено втулку 5 та через пружний елемент 6 другий інерційний вантаж 7, який виконує роль інерційної маси, у секторних прорізах втулки 5 та другого інерційного вантажу 7 вмонтовано відповідно формувачі імпульсів 8, 9, які можуть бути або металевими магнітними або неметалевими вставками з суттєвою різницею діелектричних чи магнітних властивостей, перетворювачі 10, 11 ємнісного або індуктивного типу, блок 12 визначення напрямку обертання осі, перший-третій RS-тригери 13-15 та перший, другий елементи І 16, 17. На фіг. 2 наведено діаграми роботи датчика. Багатопараметровий протиюзний датчик працює наступним чином. При русі транспортного засобу уперед або назад сигнали з перетворювача 10 ємнісного або індуктивного типу (фіг. 2, епюра 10) подаються до блока 12 визначення напрямку обертання осі, з виходу якого імпульси (фіг. 2, епюри 12-1, 12-2) установлюють перший RS-тригер 13 у стан УПЕРЕД або НАЗАД (фіг. 1) та (фіг. 2, епюри УПЕРЕД, НАЗАД). При русі транспортного засобу Уперед або Назад у режимі стаціонарної швидкості втулка 5 та другий інерційний вантаж 7 обертаються синхронно, сигнали перетворювачів 10, 11 ємнісного або індуктивного типу ідентичні, тому вихідний сигнал датчика φ або -φ дорівнює нулю. При русі транспортного засобу Уперед при його гальмуванні та при появі умов для переходу коліс до юза втулка 5 разом з віссю 4 за допомогою пружного елемента 6 повертається відносно другого інерційного вантажу 7 на певний кут φ, що приведе до зсуву по фазі сигналу 1 UA 120249 U 5 10 15 перетворювача 11 ємнісного або індуктивного типу (фіг. 2, епюра Уперед, 11) відносно сигналу перетворювача 10 ємнісного або індуктивного типу (фіг. 2, епюра Уперед, 10), у результаті чого на виході першого елемента І 16 з'явиться відповідний керуючий сигнал φ гальмування (юза). При русі транспортного засобу Назад при його розгоні та при появі умов для переходу коліс буксування втулка 5 разом з віссю 4 за допомогою пружного елемента 6 повертається відносно другого інерційного вантажу 7 у протилежному напрямку на певний кут -φ, що призведе до зсуву по фазі сигналу перетворювача 11 ємнісного або індуктивного типу (фіг. 2, епюра Назад, 11) відносно сигналу перетворювача 10 ємнісного або індуктивного типу (фіг. 2, епюра Назад, 10), у результаті чого на виході другого елемента І 17 з'явиться відповідний керуючий сигнал -φ розгону (буксування). При русі транспортного засобу Назад при його гальмуванні та при появі умов для переходу коліс до юза та при русі транспортного засобу Уперед при його розгоні та при появі умов для переходу коліс буксування пристрій працює аналогічно. Пропонована корисна модель забезпечить розширення функціональних можливостей датчика та підвищення надійності його роботи при зменшенні масо-габаритних параметрів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що перший інерційний вантаж виконано у вигляді втулки, пружну вставку закріплено між втулкою та другим інерційним вантажем, в секторних прорізах втулки та другого інерційного вантажу вмонтовано формувачі імпульсів, причому перетворювачі ємнісного або індуктивного типу встановлено з однаковим дотичним зазором до втулки та другого інерційного вантажу та підключено до блока визначення напрямку обертання осі, вихід якого з'єднаний з входами першого RS-тригера, виходи якого сполучено з першими входами першого та другого елементів І, другі входи яких зв'язано з одиничними виходами другого та третього RS-тригерів, входи яких перехресно підключено до перетворювачів ємнісного або індуктивного типу. 2 UA 120249 U 3 UA 120249 U Комп’ютерна верстка Л. Бурлак Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B60T 8/86
Мітки: датчик, багатопараметровий, протиюзний
Код посилання
<a href="https://ua.patents.su/6-120249-bagatoparametrovijj-protiyuznijj-datchik.html" target="_blank" rel="follow" title="База патентів України">Багатопараметровий протиюзний датчик</a>
Багатопараметровий протиюзний датчик

Номер патенту: 107227
Опубліковано: 25.05.2016
Автори: Смірний Михайло Федорович, Горбунов Микола Іванович, Могила Валентин Іванович
МПК: H03K 19/00, B60T 8/86
Мітки: багатопараметровий, протиюзний, датчик
Формула / Реферат:
Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано струмовихрові перетворювачі, закріплені на корпусі у площині металевих...
Багатопараметровий протиюзний датчик
Номер патенту: 120241
Опубліковано: 25.10.2017
Автори: Горбунов Микола Іванович, Смірний Михайло Федорович, Ковтанець Максим Володимирович, Могила Валентин Іванович
МПК: B60T 8/86
Мітки: протиюзний, багатопараметровий, датчик
Формула / Реферат:
Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано першу та другу пари струмовихрових перетворювачів, закріплених на корпусі у...
Багатопараметровий протиюзний датчик
Номер патенту: 107229
Опубліковано: 25.05.2016
Автори: Могила Валентин Іванович, Смірний Михайло Федорович, Горбунов Микола Іванович
МПК: B60T 8/86
Мітки: датчик, багатопараметровий, протиюзний
Формула / Реферат:
Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано два струмовихрові перетворювачі, закріплені на корпусі у площині металевих...
Двопараметричний індуктивно-ємнісний генераторний датчик
Номер патенту: 61067
Опубліковано: 11.07.2011
Автори: Ліщинська Людмила Броніславівна, Філинюк Микола Антонович, Рожкова Яна Сергіївна
МПК: G01P 3/44
Мітки: індуктивно-ємнісний, двопараметричний, генераторний, датчик
Формула / Реферат:
Двопараметричний індуктивно-ємнісний генераторний датчик, який містить транзисторну схему, три резистори, конденсатор, індуктивний первинний вимірювальний перетворювач іммітансу, загальну шину та шину живлення, причому витік транзистора приєднаний до першого виводу першого резистора, другий вивід якого з'єднаний з шиною живлення, стік транзистора з'єднаний з першим виводом другого резистора та першим виводом індуктивного первинного...
Двопараметричний індуктивний генераторний датчик
Номер патенту: 60640
Опубліковано: 25.06.2011
Автори: Ліщинська Людмила Броніславівна, Філинюк Микола Антонович, Рожкова Яна Сергіївна
МПК: G01P 3/44
Мітки: індуктивний, датчик, генераторний, двопараметричний
Формула / Реферат:
Двопараметричний індуктивний генераторний датчик, який містить транзисторну схему, три резистори, п'ять конденсаторів, перший та другий індуктивні первинні вимірювальні перетворювачі іммітансу, загальну шину та шину живлення, причому до затвора транзистора приєднаний перший вивід першого індуктивного первинного вимірювального перетворювача імітансу, витік транзистора з'єднаний з першим виводом першого резистора, другий вивід якого з'єднаний...
Попередній патент: Спосіб вилучення бурштину
Наступний патент: Пристрій для черезкісткового остеосинтезу позасуглобових дистальних переломів плечової кістки
Випадковий патент: Пристрій для відокремлення домішок від коренеплодів