Багатопараметровий протиюзний датчик
Номер патенту: 107227
Опубліковано: 25.05.2016
Автори: Могила Валентин Іванович, Горбунов Микола Іванович, Смірний Михайло Федорович

Формула / Реферат
Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано струмовихрові перетворювачі, закріплені на корпусі у площині металевих зубчастих коліс проти їхніх зубців, причому два струмовихрові перетворювачі, які закріплені у площині металевого зубчастого колеса, з'єднаного з пружним елементом, підключені до входів диференційного підсилювача, вихід якого сполучений з інформаційними входами аналогово-цифрових перетворювачів, два крайні струмовихрові перетворювачі, які закріплені у площині іншого металевого зубчастого колеса, підключені у протифазі до двох диференційних підсилювачів, виходи яких з'єднані протифазно зі входами двох синхронних RS-тригерів та елемента АБО, вихід якого через елемент НІ сполучений з першим входом першого елемента І, другий вхід якого зв'язаний з центральним струмовихровим перетворювачем, при цьому вихід першого елемента І підключений до частотоміра та до перших входів другого та третього елементів І, другі входи яких сполучені з виходами двох синхронних RS-тригерів, а виходи - з керуючими входами аналогово-цифрових перетворювачів.
Текст
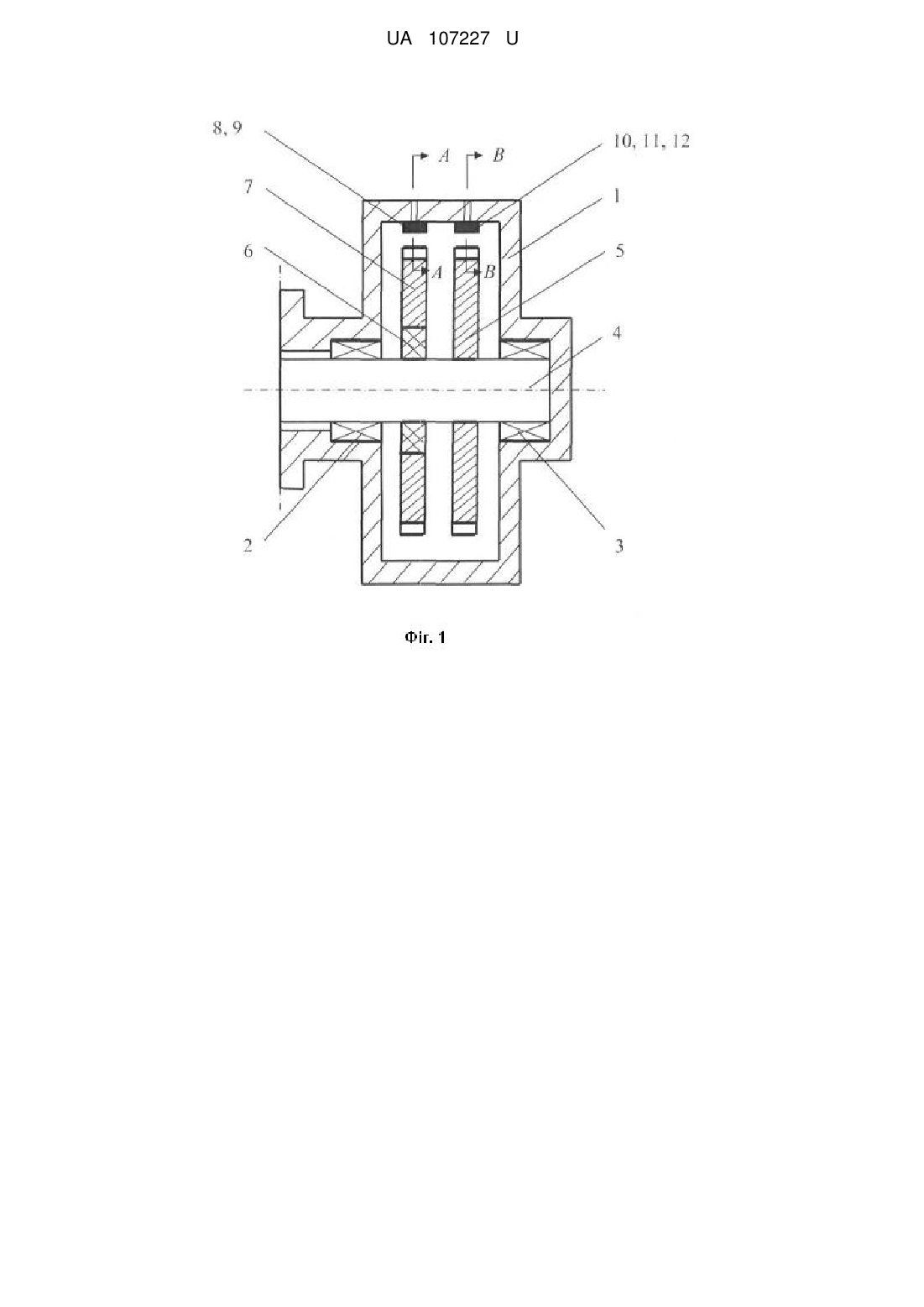
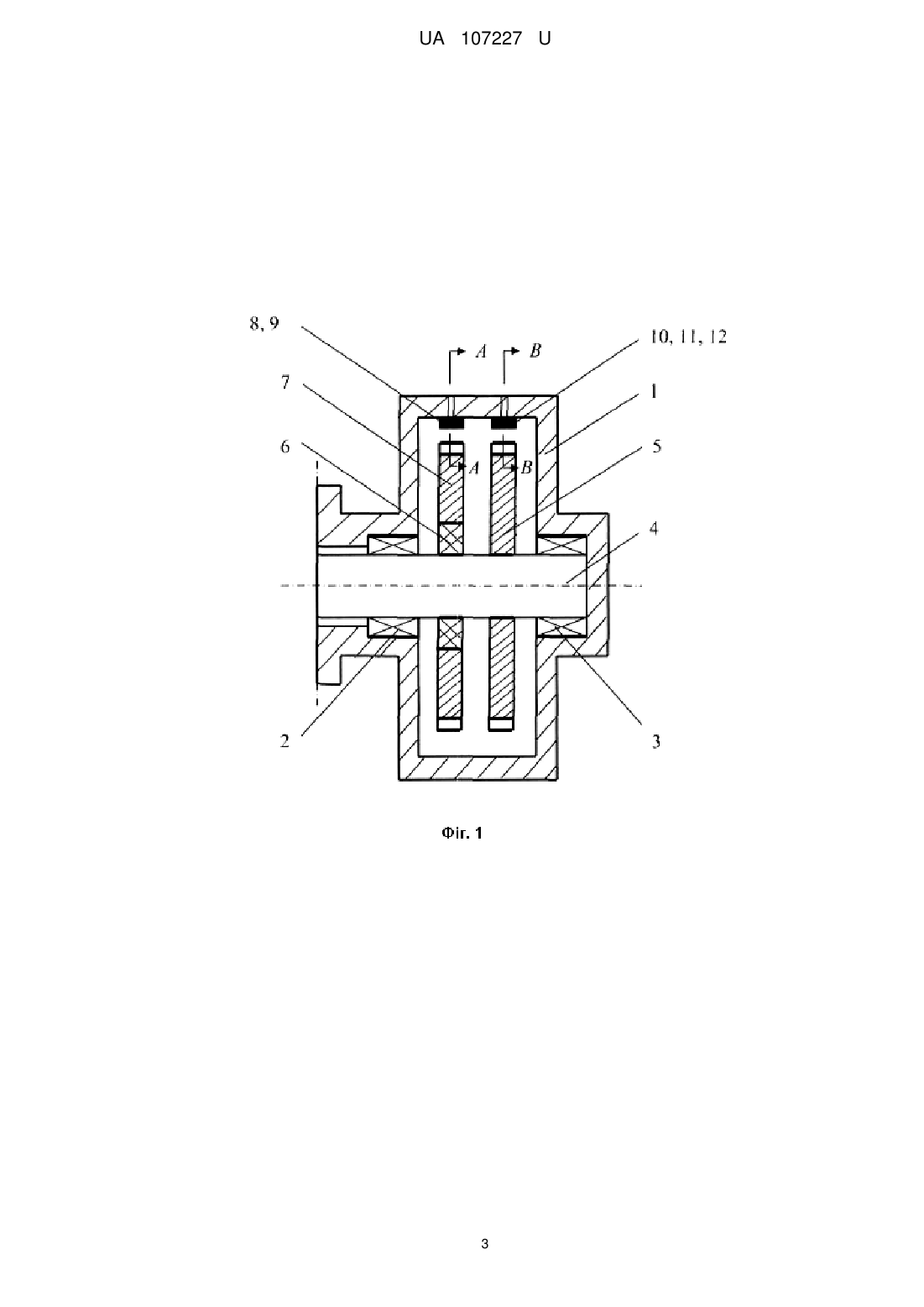
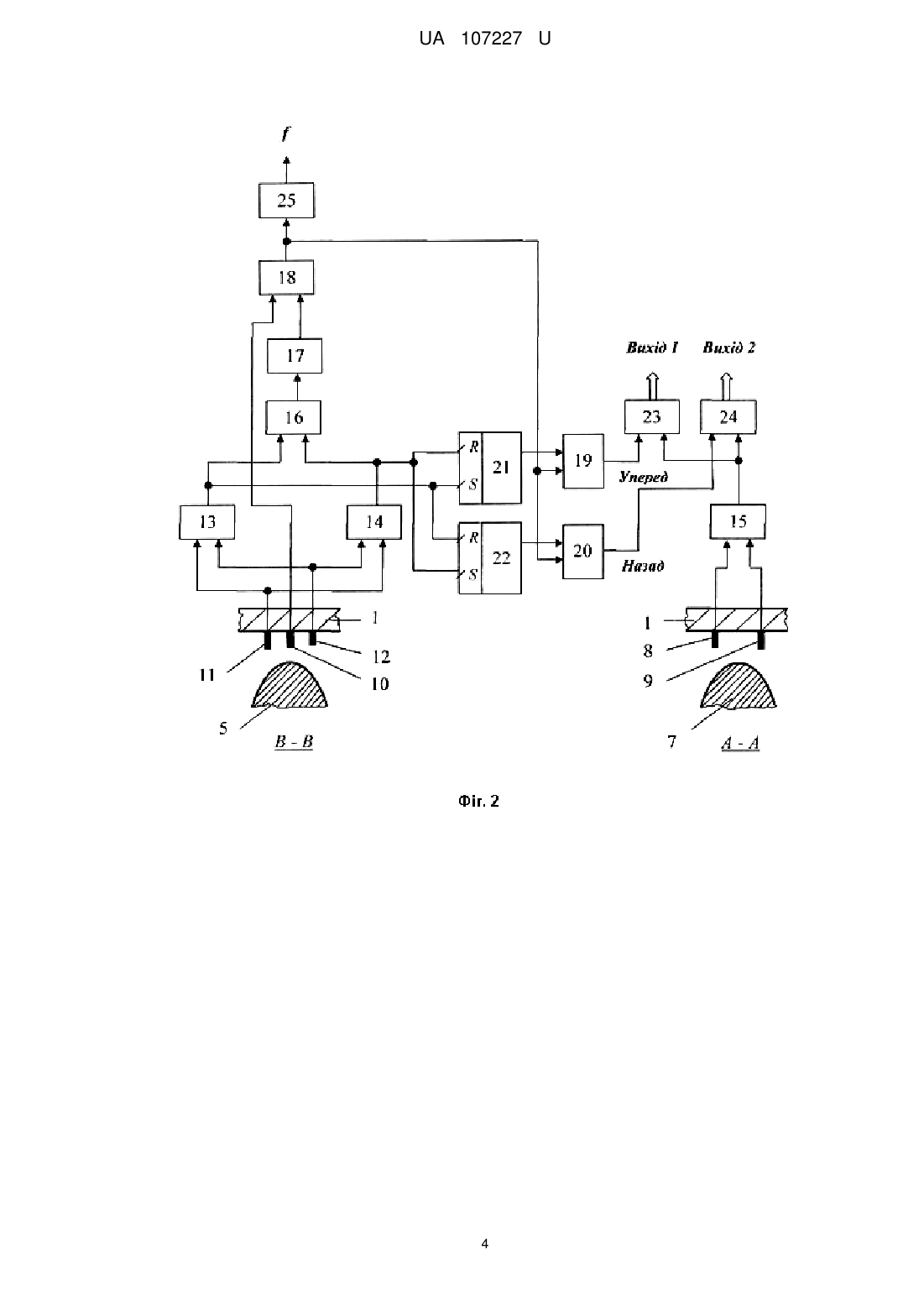
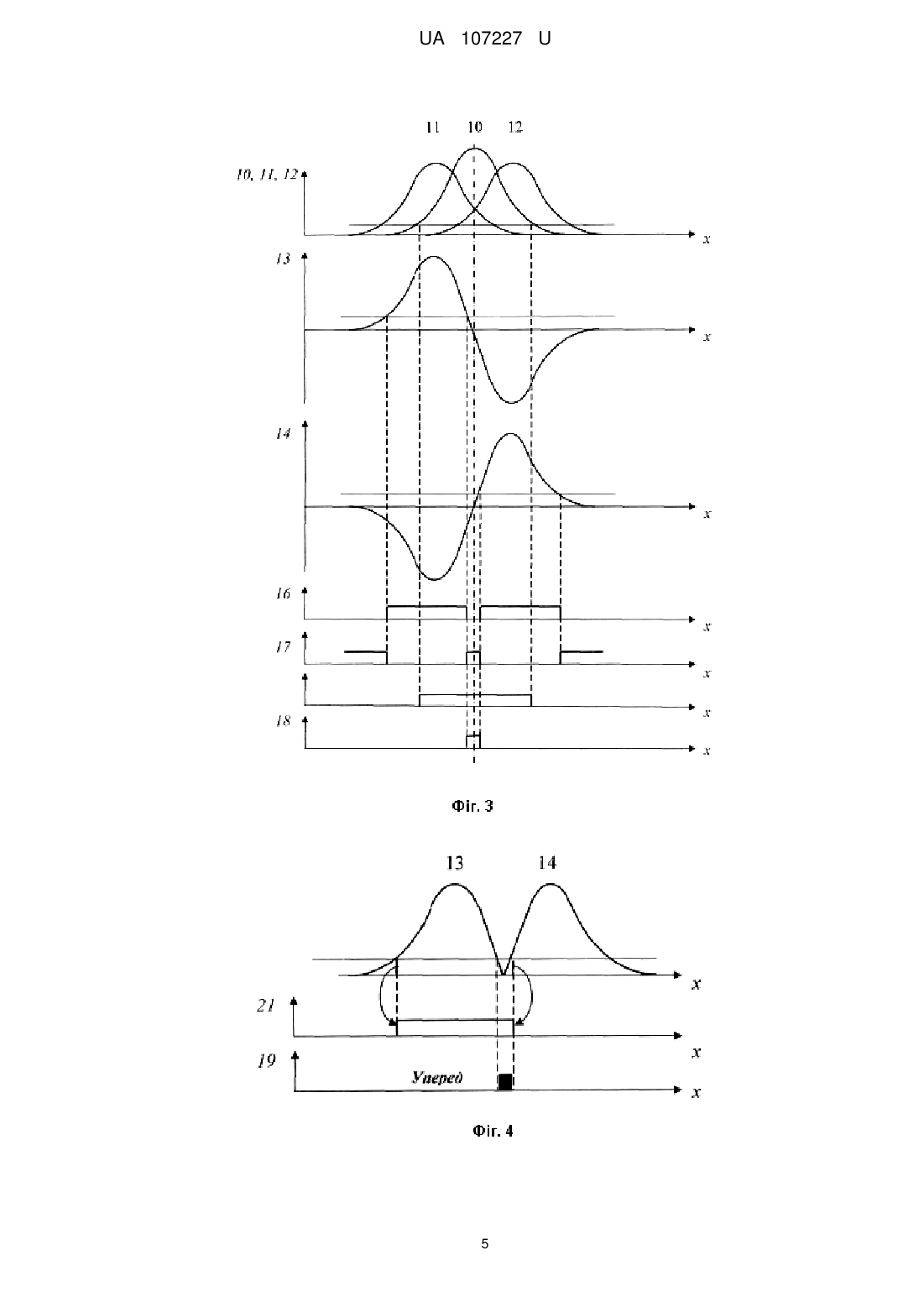
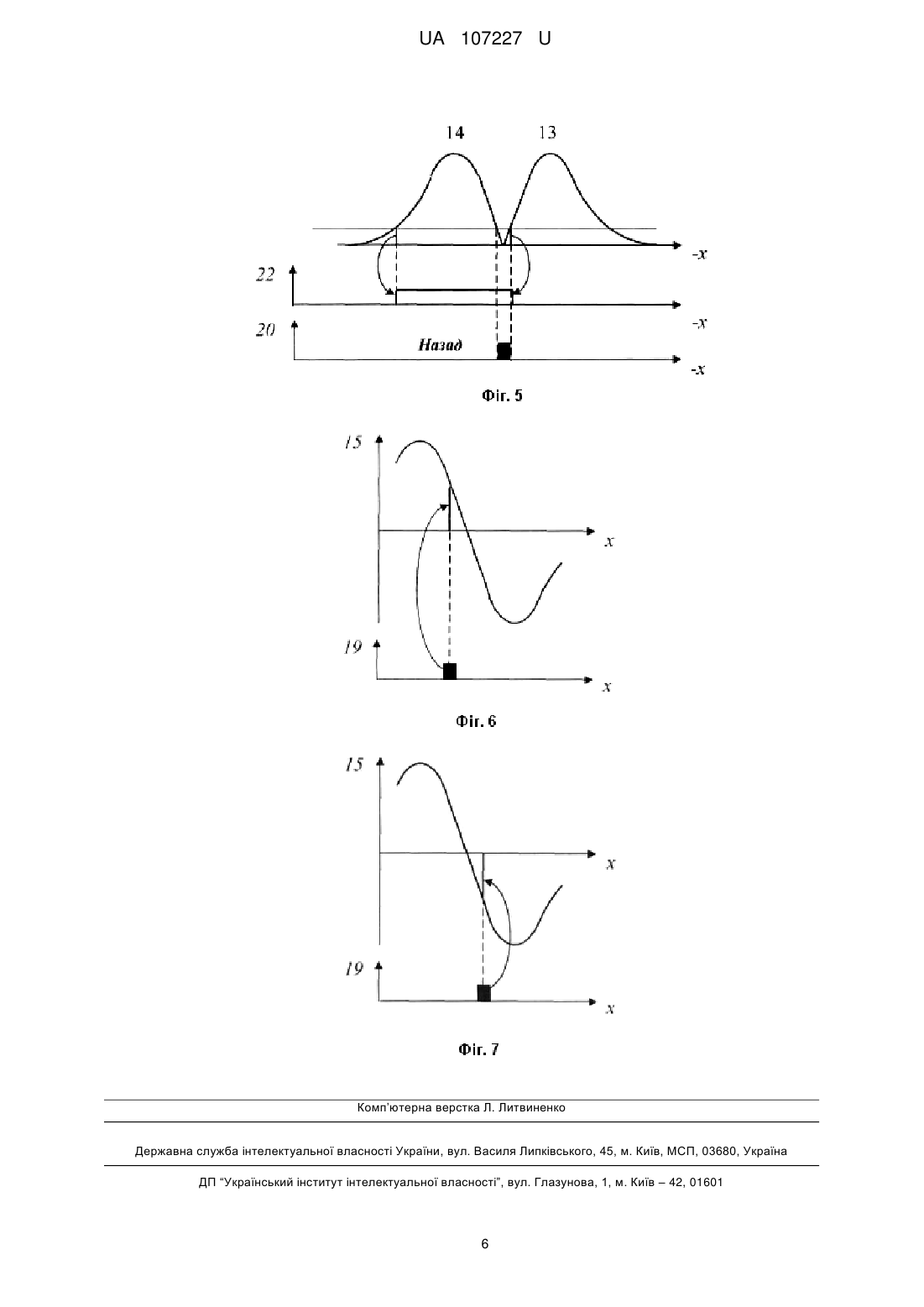
Реферат: Багатопараметровий протиюзний датчик містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач. Інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано струмовихрові перетворювачі, закріплені на корпусі у площині металевих зубчастих коліс проти їхніх зубців, причому два струмовихрові перетворювачі, які закріплені у площині металевого зубчастого колеса, з'єднаного з пружним елементом, підключені до входів диференційного підсилювача, вихід якого сполучений з інформаційними входами аналогово-цифрових перетворювачів, два крайні струмовихрові перетворювачі, які закріплені у площині іншого металевого зубчастого колеса, підключені у протифазі до двох диференційних підсилювачів, виходи яких з'єднані протифазно зі входами двох синхронних RS-тригерів та елемента АБО, вихід якого через елемент НІ сполучений з першим входом першого елемента І, другий вхід якого зв'язаний з центральним струмовихровим перетворювачем, при цьому вихід першого елемента І підключений до частотоміра та до перших входів другого та третього елементів І, другі входи яких сполучені з виходами двох синхронних RS-тригерів, а виходи - з керуючими входами аналогово-цифрових перетворювачів. UA 107227 U (54) БАГАТОПАРАМЕТРОВИЙ ПРОТИЮЗНИЙ ДАТЧИК UA 107227 U UA 107227 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до залізничного транспорту, а саме до гальмового, протиюзного та протибуксувального обладнання одиниць транспортного складу. Відомо протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано інерційний вантаж, положення якого фіксується механізмом із трьох кульок, розташованих у профільованих вирізах шайби, що розтискається пружиною корпуса штовхача з електричним контактним вмикачем, як інерційний вантаж застосовано два інерційні вантажі з радіально розташованими вікнами, як механізм застосовано пружний елемент і як електричний контактний вмикач застосовано безконтактний вмикач [див. патент України № 62169, В60Т 8/86, опубл. 15.12.2003, бюл. № 12]. Цей датчик вибрано за прототип. Недоліком відомого протиюзного датчика є те, що наявний безконтактний вмикач не забезпечує вироблення більш інформативного сигналу керування та достатню надійність роботи датчика. В основу корисної моделі поставлено задачу вдосконалення багатопараметрового протиюзного датчика шляхом того, що інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано струмовихрові перетворювачі, закріплені на корпусі у площині металевих зубчастих коліс проти їхніх зубців, причому два струмовихрові перетворювачі, які закріплені у площині металевого зубчастого колеса, з'єднаного з пружним елементом, підключені до входів диференційного підсилювача, вихід якого сполучений з інформаційними входами аналогово-цифрових перетворювачів, два крайні струмовихрові перетворювачі, які закріплені у площині іншого металевого зубчастого колеса, підключені у протифазі до двох диференційних підсилювачів, виходи яких з'єднані протифазно зі входами двох синхронних RS-тригерів та елемента АБО, вихід якого через елемент НІ сполучений з першим входом першого елемента І, другий вхід якого зв'язаний з центральним струмовихровим перетворювачем, при цьому вихід першого елемента І підключений до частотоміра та до перших входів другого та третього елементів І, другі входи яких сполучені з виходами двох синхронних RS-тригерів, а виходи - з керуючими входами аналогово-цифрових перетворювачів. Це дозволить підвищити надійність датчика та докладно аналізувати умови розгону, гальмування та переходу коліс до руху юзом та буксування при русі транспортного засобу в обох напрямках, що забезпечить розширення сфери застосування датчика. Поставлена задача вирішується тим, що у багатопараметровому протиюзному датчику, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, згідно з корисною моделлю, інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано струмовихрові перетворювачі, закріплені на корпусі у площині металевих зубчастих коліс проти їхніх зубців, причому два струмовихрові перетворювачі, які закріплені у площині металевого зубчастого колеса, з'єднаного з пружним елементом, підключені до входів диференційного підсилювача, вихід якого сполучений з інформаційними входами аналогово-цифрових перетворювачів, два крайні струмовихрові перетворювачі, які закріплені у площині іншого металевого зубчастого колеса, підключені у протифазі до двох диференційних підсилювачів, виходи яких з'єднані протифазно зі входами двох синхронних RS-тригерів та елемента АБО, вихід якого через елемент НІ сполучений з першим входом першого елемента І, другий вхід якого зв'язаний з центральним струмовихровим перетворювачем, при цьому вихід першого елемента І підключений до частотоміра та до перших входів другого та третього елементів І, другі входи яких сполучені з виходами двох синхронних RS-тригерів, а виходи - з керуючими входами аналогово-цифрових перетворювачів. Суть корисної моделі пояснюється кресленнями (фіг. 1, 2), де зображено багатопараметровий протиюзний датчик, що містить корпус 1 зі вставленою в нього у підшипниках 2, 3 віссю 4, на яку насаджено металеве зубчасте колесо 5 та через пружний елемент 6 металеве зубчасте колесо 7, струмовихрові перетворювачі 8, 9, закріплені у площині металевого зубчастого колеса 7, струмовихрові перетворювачі 10-12, закріплені у площині металевого зубчастого колеса 5, диференційні підсилювачі 13-15, елемента АБО 16, елемент НІ 17, перший-третій елементи І 18-20, синхронні RS-тригери 21, 22, аналогово-цифрові перетворювачі 23, 24 та частотомір 25. Багатопараметровий протиюзний датчик працює наступним чином. При русі транспортного засобу у будь-якому напрямку на виходах диференційних підсилювачів 13, 14, на входи яких надходять сигнали зі струмовихрових перетворювачів 11, 12 (фіг. 3, епюри 10, 11, 12), з'являються дипульсні сигнали протилежної полярності), при цьому на виходах елемента АБО 16 та елемента НІ 17 формуються сигнали, зображені на фіг. 3 (епюри 16, 17), а на виході 1 UA 107227 U 5 10 15 20 25 30 35 40 45 50 першого елемента І 18 з'являється короткий імпульс у вузькій зоні по центру зуба металевого зубчастого колеса 5 (фіг. 3, епюра 18). В режимі стаціонарної швидкості металеві зубчасті колеса 5, 7 обертаються синхронно, сигнал диференційного підсилювача 15 під час вироблення імпульсу першим елементом І 18 дорівнює нулю, тому вихідні сигнали датчика Вихід 1 та Вихід 2 відсутні. При русі транспортного засобу Уперед при гальмуванні та при появі умов для переходу коліс до юзу металеве зубчасте колесо 7 за допомогою пружного елемента 6 повертається відносно металевого зубчастого колеса 5 на певний кут. Сигналом позитивної півхвилі диференційного підсилювача 13 вмикається синхронний RS-тригер 21, а сигналом позитивної півхвилі диференційного підсилювача 14 він вимикається (фіг. 4, епюра 21). При цьому на виході другого елемента І 19 формується імпульс Уперед (фіг. 4, епюра 19, який надходить на другий вхід аналогово-цифрового перетворювача 23, на виході якого у цей момент з'являється відповідний цифровий сигнал Вихід I (фіг. 6). При русі транспортного засобу Уперед при розгоні та при появі умов для переходу коліс до буксування металеве зубчасте колесо 7 за допомогою пружного елемента 6 повертається відносно металевого зубчастого колеса 5 на певний кут. При цьому у момент формування імпульсу Уперед (фіг. 4, епюра 19) на виході аналогово-цифрового перетворювача 23 з'являється відповідний цифровий сигнал Вихід 1 (фіг. 7). При русі транспортного засобу Назад при гальмуванні та при появі умов для переходу коліс до юзу металеве зубчасте колесо 7 за допомогою пружного елемента 6 повертається відносно металевого зубчастого колеса 5 на певний кут у протилежному напрямку. Сигналом позитивної півхвилі диференційного підсилювача 14 вмикається синхронний RS-тригер 22, а сигналом позитивної півхвилі диференційного підсилювача 13 він вимикається (фіг. 5, епюра 22). При цьому на виході третього елемента І 20 формується імпульс Назад (фіг. 5, епюра 20), який поступає на другий вхід аналогово-цифрового перетворювача 24, на виході якого у цей момент з'являється відповідний цифровий сигнал Вихід 2. При русі транспортного засобу Назад при розгоні та при появі умов для переходу коліс до буксування металеве зубчасте колесо 7 за допомогою пружного елемента 6 повертається відносно металевого зубчастого колеса 5 на певний кут у протилежному напрямку. При цьому у момент формування імпульсу Назад (фіг. 5, епюра 20) на виході аналогово-цифрового перетворювача 24 з'являється відповідний цифровий сигнал Вихід. Пропонована корисна модель забезпечить підвищення надійності роботи датчика та розширення його функціональних можливостей. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Багатопараметровий протиюзний датчик, що містить приєднаний до букси корпус з розташованою всередині у підшипниках віссю, на якій вмонтовано два інерційні вантажі з радіально розташованими вікнами, пружний елемент і безконтактний вмикач, який відрізняється тим, що інерційні вантажі виконано у вигляді металевих зубчастих коліс, а як безконтактний вмикач застосовано струмовихрові перетворювачі, закріплені на корпусі у площині металевих зубчастих коліс проти їхніх зубців, причому два струмовихрові перетворювачі, які закріплені у площині металевого зубчастого колеса, з'єднаного з пружним елементом, підключені до входів диференційного підсилювача, вихід якого сполучений з інформаційними входами аналогово-цифрових перетворювачів, два крайні струмовихрові перетворювачі, які закріплені у площині іншого металевого зубчастого колеса, підключені у протифазі до двох диференційних підсилювачів, виходи яких з'єднані протифазно зі входами двох синхронних RS-тригерів та елемента АБО, вихід якого через елемент НІ сполучений з першим входом першого елемента І, другий вхід якого зв'язаний з центральним струмовихровим перетворювачем, при цьому вихід першого елемента І підключений до частотоміра та до перших входів другого та третього елементів І, другі входи яких сполучені з виходами двох синхронних RS-тригерів, а виходи - з керуючими входами аналогово-цифрових перетворювачів. 2 UA 107227 U 3 UA 107227 U 4 UA 107227 U 5 UA 107227 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H03K 19/00, B60T 8/86
Мітки: протиюзний, багатопараметровий, датчик
Код посилання
<a href="https://ua.patents.su/8-107227-bagatoparametrovijj-protiyuznijj-datchik.html" target="_blank" rel="follow" title="База патентів України">Багатопараметровий протиюзний датчик</a>
Датчик рівня рідини
Номер патенту: 100057
Опубліковано: 10.07.2015
Автори: Смірний Михайло Федорович, Марченко Андрій Петрович
МПК: G01G 9/00
Формула / Реферат:
Датчик рівня рідини, що містить трубопровід системи охолодження двигуна, з'єднувальну трубку, трубу-корпус, шток, поплавок, діафрагму, ковпак, контактне кільце та контактні виступи, який відрізняється тим, що як контактне кільце та контактні виступи застосовано закріплений на штоку циліндричний якір та пару кільцевих струмовихрових перетворювачів, розташованих на відстані один від іншого на відстані, що дорівнює довжині циліндричного якоря,...
Датчик різниці тисків
Номер патенту: 100632
Опубліковано: 10.08.2015
Автори: Полив'янчук Андрій Павлович, Смірний Михайло Федорович
МПК: G01L 9/16, G01L 13/00
Мітки: датчик, різниці, тисків
Формула / Реферат:
Датчик різниці тисків, що містить корпус, закріплені у перегородці мембранні коробки, шток, корпус чутливого елемента, траверсу та компенсаційні стояки, постійний магніт, пару ферозондів, розташованих з протилежних боків постійного магніту, при цьому ферозонди з'єднані один з одним за диференціальною схемою, котушку, вмонтовану у корпус чутливого елемента у площині магнітної нейтралі постійного магніту, який відрізняється тим, що як пару...
Датчик різниці тисків
Номер патенту: 79206
Опубліковано: 10.04.2013
Автори: Полив'янчук Андрій Павлович, Смірний Михайло Федорович
МПК: G01L 13/00
Мітки: різниці, датчик, тисків
Формула / Реферат:
Датчик різниці тисків, що містить корпус, закріплені у перегородці мембранні коробки, шток, корпус чутливого елемента, траверсу та компенсаційні стояки, постійний магніт, пару ферозондів, розташованих з протилежних боків постійного магніту, при цьому ферозонди з'єднані один з одним за диференціальною схемою, який відрізняється тим, що містить котушку, вмонтовану у корпус чутливого елемента у площині магнітної нейтралі постійного магніту.
Перетворювач переміщення у код
Номер патенту: 78218
Опубліковано: 11.03.2013
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: переміщення, код, перетворювач
Формула / Реферат:
Перетворювач переміщення у код, що містить струмовихрові перетворювачі, підключені через автогенератори до відповідних тригерів Шмітта, тригер пам'яті, вхід якого з'єднаний з виходом одного з тригерів Шмітта, та схема збігу, перший вхід якої підключений до виходу другого тригера Шмітта, другий вхід - до виходу тригера пам'яті, а вихід схеми збігу зв'язаний з другим входом тригера пам'яті та з виходом перетворювача, який відрізняється тим, що...
Датчик кутової швидкості
Номер патенту: 8382
Опубліковано: 15.08.2005
Автори: Прийма Віктор Володимирович, Щадних Катерина Олександрівна, Джулгаков Віталій Георгійович, Субота Анатолій Максимович
МПК: G01P 9/00
Мітки: кутової, швидкості, датчик
Формула / Реферат:
Датчик кутової швидкості, що містить гіровузол, датчики кута, моменту і підсилювач зворотного зв'язку, який відрізняється тим, що в нього додатково введені два підсилювачі, аналого-цифровий та цифро-аналоговий перетворювачі, пристрій вибору та збереження інформації, чотири ключі, реверсивний лічильник, блоки керування і синхронізації, і причому вихід датчика кута через перший підсилювач, аналого-цифровий перетворювач, пристрій вибору та...
Попередній патент: Пристрій для визначення різниці механічних напружень у феромагнітних конструкціях
Наступний патент: Пристрій бортового віброконтролю підшипникового вузла колісно-моторного блока локомотива
Випадковий патент: Антигістамінні спіросполуки