Датчик кутової швидкості та система його віброзахисту
Номер патенту: 1207
Опубліковано: 15.04.2002
Автори: Леоненко Сергій Миколайович, Гаврилюк Володимир Леонідович, Гуменюк Володимир Григорович, Шервашидзе Володимир Варлаамович, Олексієнко Микола Петрович, Васильєв Володимир Леонідович, Шкляр Володимир Петрович

Формула / Реферат
1. Датчик кутової швидкості, який містить розміщений за допомогою підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку та схему визначення показника кутової швидкості, який відрізняється тим, що чутливий елемент підвішено у корпусі за допомогою гнучкого підвісу, гіромотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і паралельно з віссю симетрії чутливого елемента, компенсаційна котушка силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів, а коло зворотного зв'язку містить два активні випрямлячі, кожен з яких має два відповідних входи, причому прямий вхід першого випрямляча з'єднаний із виводом першої котушки індуктивності диференційного датчика положення чутливого елемента, а інший вхід першого випрямляча з'єднаний із виводом другої котушки вказаного датчика положення, прямий вхід другого випрямляча з'єднаний з виводом другої котушки індуктивності, а інший вхід другого випрямляча з'єднаний із виводом першої котушки індуктивності диференційного датчика положення, виводи від вказаних випрямлячів з'єднані із відповідними входами суматора.
2. Датчик за п. 1, який відрізняється тим, що до схеми визначення показника кутової швидкості входять вимірювальний резистор, з'єднаний із входом до буферного підсилювача, який має коло для встановлення необхідного масштабу сигналу на виході датчика та коло для встановлення нульового сигналу на виході буферного підсилювача при відсутності впливу на чутливий елемент.
3. Датчик за п. 1 або 2, який відрізняється тим, що чутливий елемент закріплено на підвісі, який складається принаймні з пари пружних і гнучких пластинок, розміщених по різні боки чутливого елемента, кожна з яких утримується за кінці між двома паралельними пластинами, одна з яких прикріплена до корпуса датчика, а інша своїм протилежним кінцем - до чутливого елемента.
4. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що компенсаційна котушка магнітоелектричного силового перетворювача розміщена на чутливому елементі у заглибленні так, що вона знаходиться на одному рівні із зовнішньою поверхнею чутливого елемента.
5 Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що підвіс виготовлено з міцного та пружного матеріалу, зокрема з реній-молібденового сплаву.
6. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що чутливий елемент виготовлено з струмопровідного матеріалу.
7. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що плоскі постійні магніти виготовлені з матеріалу з високими магнітними властивостями, стабільними в широкому діапазоні температур, зокрема з самарій-кобальтового сплаву.
8. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що датчик положення розміщено на рівні вільного кінця чутливого елемента.
9. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що вказаний підвіс чутливого елемента закріплено на корпусі через перехідник з принаймні трьома пружними балочками, розміщеними принаймні в двох паралельних з вимірювальною віссю датчика площинах, протилежні кінці яких жорстко защемлені на корпусі та на перехіднику, причому пружність балочок перевищує пружність підвісу чутливого елемента.
10. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що на корпусі датчика біля центра ваги чутливого елемента паралельно з вимірювальною віссю, встановлені обмежувачі.
11. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що у чутливому елементі вздовж його осі симетрії та перпендикулярно до осі, по якій згинається підвіс, виконане заглиблення, а на корпусі датчика - відповідний виступ.
12. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що у чутливому елементі вздовж осі, по якій згинається підвіс, та перпендикулярно до осі симетрії чутливого елемента, виконане заглиблення, а на корпусі датчика - відповідний виступ.
13. Система віброзахисту датчика для вимірювання кутової швидкості, яка відрізняється тим, що підвіс чутливого елемента закріплено на корпусі через перехідник з принаймні трьома пружними балочками, розміщеними принаймні в двох паралельних з вимірювальною віссю пристрою площинах, протилежні кінці яких жорстко защемлені на корпусі та на перехіднику, причому пружність балочок перевищує пружність підвісу чутливого елемента.
14. Система віброзахисту за п. 12, яка відрізняється тим, що на корпусі датчика біля центру ваги чутливого елемента, паралельно з вимірювальною віссю, встановлені обмежувачі.
15. Система віброзахисту за п. 12 або 13, яка відрізняється тим, що у чутливому елементі вздовж його осі симетрії та перпендикулярно до осі, по якій згинається підвіс, виконане заглиблення, а на корпусі датчика - відповідний виступ.
16. Система віброзахисту за будь-яким з попередніх пунктів, яка відрізняється тим, що у чутливому елементі вздовж осі, по якій згинається підвіс, та перпендикулярно до осі симетрії чутливого елемента, виконане заглиблення, а на корпусі датчика - відповідний виступ.
Текст
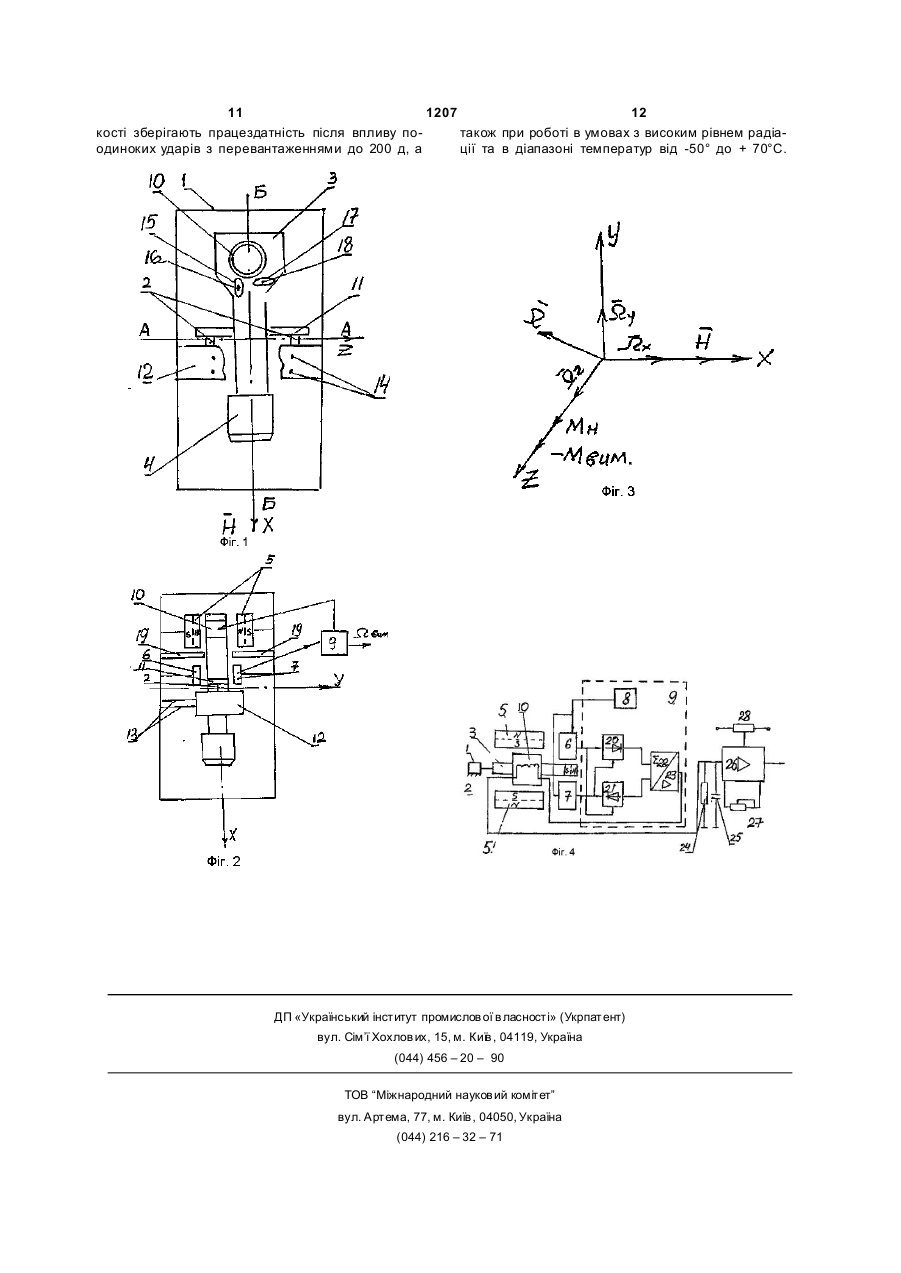
1. Датчик кутової швидкості, який містить розміщений за допомогою підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку та схему визначення показника кутової швидкості, який відрізняється тим, що чутливий елемент підвішено у корпусі за допомогою гнучкого підвісу, гіромотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і паралельно з віссю симетрії чутливого елемента, компенсаційна котушка силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів, а коло зворотного зв'язку містить два активні випрямлячі, кожен з яких має два відповідних входи, причому прямий вхід першого випрямляча з'єднаний із виводом першої котушки індуктивності диференційного датчика положення чутливого елемента, а інший вхід першого випрямляча з'єднаний із виводом другої котушки вказаного датчика положення, прямий вхід другого випрямляча з'єднаний з виводом другої котушки індуктивності, а інший вхід другого випрямляча з'єднаний із виводом першої котушки індуктивності диференційного датчика положення, виводи від вказаних випрямлячів з'єднані із відповідними 2. Датчик за п. 1, входами суматора.який відрізняється тим, що до схеми визначення показника кутової швидкості входять вимірювальний резистор, з'єднаний із входом до буферного підсилювача, який має коло для встановлення необхідного масштабу сигналу на виході датчика та коло для встановлення нульового сигналу на виході буферного підсилювача при відсутності впливу на чутливий елемент. 3. Датчик за п. 1 або 2, який відрізняється тим, 2 (19) 1 3 1207 4 відрізняє ться тим, що у чутливому елементі 14. Система віброзахисту за п. 12, яка вздовж осі, по якій згинається підвіс, та перпендивідрізняє ться тим, що на корпусі датчика біля кулярно до осі симетрії чутливого елемента, викоцентру ваги чутливого елемента, паралельно з нане заглиблення, а на корпусі датчика - відповідвимірювальною віссю, встановлені обмежувачі. ний виступ. 15. Система віброзахисту за п. 12 або 13, яка від13. Система віброзахисту датчика для вимірюванрізняється тим, що у чутливому елементі вздовж ня кутової швидкості, яка відрізняється тим, що його осі симетрії та перпендикулярно до осі, по підвіс чутливого елемента закріплено на корпусі якій згинається підвіс, виконане заглиблення, а на через перехідник з принаймні трьома пружними корпусі датчика - відповідний виступ. балочками, розміщеними принаймні в двох пара16. Система віброзахисту за будь-яким з поперелельних з вимірювальною віссю пристрою площидніх пунктів, яка відрізняється тим, що у чутлинах, протилежні кінці яких жорстко защемлені на вому елементі вздовж осі, по якій згинається підкорпусі та на перехіднику, причому пружність бавіс, та перпендикулярно до осі симетрії чутливого лочок перевищує пр ужність підвісу чутливого елеелемента, виконане заглиблення, а на корпусі дамента. тчика - відповідний виступ. Корисна модель відноситься до вимірювальної техніки, зокрема до гіроскопічних датчиків кутової швидкості обертання об'єкта, і може бути використана в різноманітних інерційних приладах та системах для автономного орієнтування та навігації транспортних засобів та об'єктів робототехніки, для топогеодезичного забезпечення будівництва тунелів, шахт, при укладці трубопроводів, бурінні свердловин, для оцінки стану тормозних систем різноманітних транспортних засобів, залізничних колій, при роботі вказаних приладів та систем в умовах з високим рівнем радіації, температури та перевантаження. Проте можливі сфери використання корисної моделі не обмежуються лише вказаними вище. Існують різноманітні типи пристроїв для вимірювання кутової швидкості, які в залежності від структури бувають компенсаційні чи з прямим перетворювачем, а в залежності від типу підвісу чутливого елементу їх розрізняють як пристрої з електростатичним, поплавковим, торсіонним підвісом тощо. Вони розрізняються також типами датчиків положення, видами вихідних сигналів, способами прикріплювання та властивостями чутливого елементу. В сучасних умовах широко використовують датчики кутової швидкості компенсаційного типу. Вони являють собою автоматичні компенсаційні системи із негативним зворотнім зв'язком, в яких, як відомо, різко зменшується похибка, яка пов'язана безпосередньо з чутливим елементом, підвищується лінійність перетворення, розширюється діапазон вимірювань. Приклади компенсаційних датчиків кутової швидкості описані, наприклад, в патентах СРСР 17993382, G 01 Ρ 9/02, 1993 та 1830484, G 01 Ρ 09/02, 1993. Останній можна вважати за найближчий аналог. Цей датчик має розміщений у корпусі підвіс з промотором, датчик кута, підсилювач зворотного зв'язку та датчик моменту, вихід якого є виходом пристрою для вимірювання кутової швидкості. Гіроскопічний момент, який виникає при обертанні пристрою і який викликає переміщення чутливого елемента, компенсується датчиком моменту, величина струму в якому пропорційна кутовій швидкості. Вказані вище відомі датчики кутової швидкості мають свої переваги, але і певні технічні обмеження, що спонукає до розробки нових пристроїв для вимірювання параметрів руху, зокрема кутової швидкості. Самим уразливим у датчиках кутової швидкості є підвіс чутливого елемента, оскільки він знаходиться під впливом ударного навантаження. Для його захисту використовують різноманітні засоби, наприклад використовують безконтактні чи торсіонні підвіси. За найближчий аналог можна вважати систему, описану в а.с. СРСР 1830484, G01P09/02,1993, згідно з якою чутливий елемент захищають за допомогою безконтактного підвісу. Така система захисту прийнятна для датчиків кутової швидкості поплавкого типу. Задачею корисної моделі є надійний, конструктивно простий, чутливий датчик для вимірювання кутової швидкості, який з високою точністю здатний вимірювати кутову швидкість в широкому діапазоні, в тому числі при перевантаженні, високих температурах та рівнях радіації. Ще одна задача полягає в розробці надійної та універсальної системи захисту датчика кутової швидкості від впливу на нього вібраційного перевантаження. Одна задача корисної моделі втілена у датчику кутової швидкості, до якого входять чутливий елемент з гідромотором, датчик положення, коло зворотного зв'язку та схема визначення показника кутової швидкості, у якому новим є те, що чутливий елемент закріплено у корпусі за допомогою гнучкого підвіса, компенсаційна котушка силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів, а гідромотор встановлюють на чутливому елементі так, що вісь його обертання направлена перпендикулярно до вісі, по якій згинається підвіс, і паралельно з віссю симетрії чутливого елемента. Чутливий елемент з промотором закріплено у 5 1207 6 корпусі на підвісові, який складається принаймні з строю площинах, протилежні кінці яких жорстко пари пругких і гнучких пластинок, розміщених по защемлені на корпусі та на перехіднику, причому різні боки від чутливого елемента, кожна з яких пругкість балочок перевищує пругкість підвісу чутутримується за кінці між двома паралельними ливого елемента. пластинами, одна з яких кріпиться до корпуса датТаке розміщення та властивості балочок дочика, а інша - до чутливого елемента. зволяють перехіднику переміщуватися в датчику Окрім того, підвіс чутливого елемента можна вздовж вимірювальної вісі. закріплювати в корпусі через перехідник з розміДля обмеження переміщення чутливого елещеними паралельно до вимірювальної вісі датчика мента в площині XOZ застосовані обмежувачі: принаймні трьома пругкими та гнучкими балочкавздовж вісі Z, для чого у чутливому елементі біля ми, розміщеними принаймні в двох площинах та його центра ваги та вздовж вісі X датчика ( паражорстко закріплених на корпусі і на перехіднику, лельно з віссю симетрії Б-Б чутливо го елемента та причому пругкість балочок повинна перевищува ти перпендикулярно до вісі А-А, по якій згинається пругкість підвісу. підвіс) зроблене заглиблення, а на корпусі датчика На корпусі датчика паралельно з вимірюваль-відповідний виступ, а також вздовж вісі X датчика, ною віссю на рівні центра ваги чутливого елемента для чого біля центра ваги чутливого елемента встановлені обмежувачі. перпендикулярно до вісі симетрії Б-Б чутливого В чутливому елементі вздовж його вісі симетелемента, (його поздовжньої вісі) та паралельно з рії та перпендикулярно до вісі, по якій згинається віссю А-А, по якій згинається підвіс, зроблене підвіс, зроблене заглиблення, а на корпусі датчика вздовж вісі Ζ датчика заглиблення, а на корпусі - відповідний виступ; також зроблене заглиблення датчика - відповідний виступ. у чутливому елементі вздовж вісі, по якій згинаєтьОкрім того, на корпусі вздовж вимірювальної ся підвіс, та перпендикулярно до вісі симетрії чутвісі Υ да тчика встановлені обмежувачі. ливого елемента, а на корпусі датчика відповідний Така система забезпечує віброзахист від виступ. впливу де формаційних сил на датчик кутової Компенсаційна котушка магнітоелектричного швидкості з будь-якого напрямку. силового перетворювача розміщена на чутливому На фіг.1 представлена у площині ΧΟΖ принциелементі у заглибленні так, що вона знаходиться пова конструктивна схема датчика кутової швидна одному рівні із зовнішньою поверхнею чутливокості. го елемента. На фіг.2 - те саме у площині ΧΟΥ. Підвіс виготовлено з міцного та пругкого матеНа фіг.3 показана система координат, яка поріалу, зокрема з реній-молібденового плаву, а чутв'язана з об'єктом. ливий елемент - з струмопровідного матеріалу. На фіг.4 представлена загальна електрична Плоскі постійні магніти виготовлені з матеріалу схема датчика кутової швидкості. з високими магнітними властивостями, стабільниДатчик для вимірювання кутової швидкості ми в широкому діапазоні температур, зокрема з (фіг.1,2) складається з корпуса 1, в якому на гнучсамарій-кобальтового плаву. кому пругкому підвісові 2 розміщений чутливий Датчик положення розміщено на рівні вільного елемент 3 у вигляді тонкої пластини з струмопрокінця чутливого елемента. відного матеріалу, наприклад із алюмінієвого плаКоло зворотного зв'язку містить два активні ву Д16. На чутливому елементі підвішують гідровипрямляча, кожен з яких має два відповідних мотор 4 так, щоб його вісь обертання ( вісь входи, причому прямий вхід першого випрямляча кінетичного моменту Н) була перпендикулярна до з'єднаний із виводом від першої котушки індуктиввісі А-А, по якій згинається підвіс, та паралельна з ності диференційного датчика положення чутливовіссю симетрії чутливого елемента (його поздовжго елемента, а інший вхід першого випрямляча ній вісі Б-Б) (фіг.1). У якості гідромотора 4 можна з'єднаний з виводом від другої котушки вказаного використовува ти будь-який серійно виготовлений датчика положення, прямий вхід другого випрямгідромотор з необхідними технічними характерисляча з'єднаний з виводом від другої котушки індуктиками, наприклад гідромотор ГМС-0,01В. тивності, а інший вхід другого випрямляча з'єднаНа внутрішній боковій стінці корпуса 1 встаноний із виводом від першої котушки індуктивності влені один проти іншого постійні магніти 5 плоскої диференційного датчика положення, виводи від форми із зустрічною орієнтацією магнітних полів вказаних випрямлювачів з'єднані із відповідними та увімкнуті по мостовій схемі індукційні котушки входами до суматора. 6,7 датчика положення чутливого елемента 3, у До схеми визначення показника кутової швидякості якого може бути використаний, наприклад, кості входять вимірювальний резистор, з'єднаний диференційний датчик положення. Живлення вказі входом до буферного підсилювача, який має заних котушок 6,7 здійснюється за допомогою виколо для встановлення необхідного масштабу сигсокочастотного генератора 8 (фіг.4). Вказані індукналу на виході датчика та коло для встановлення ційні котушки 6,7 краще розміщувати на рівні нульового сигналу на виході буферного підсилювільного кінця чутливого елемента 3. вача при відсутності впливу на чутливий елемент. Виводи від індукційних котушок 6,7 диференЩе одна задача втілена у системі віброзахисційного датчика положення з'єднані з відповідними ту датчика кутової швидкості, у якій новим є те, що входами до блоку 9 для формування відповідної підвіс чутливого елементу прикріплено до корпуса компенсаційної сили для здійснення зворотного пристрою через перехідник з принаймні трьома зв'язку будь-яким відповідним відомим магнітоелепругкими балочками, розміщеними принаймні в ктричним силовим перетворювачем. Проте краще двох паралельних з вимірювальною віссю прице здійснювати шляхом обробки диференційних 7 1207 8 сигналів, які поступають від вказаних котушок 6,7 згинається підвіс 2, зроблене заглиблення 17, а на датчика положення так, як це описано далі. Блок 9 корпусі датчика - відповідний виступ 18. можна встановлювати як у корпусі 1 пристрою, так Окрім того, на корпусі 1 вздовж вісі Υ датчика і поза ним. В останньому випадку розширюються розміщені два обмежувача 19, які жорстко закріпможливі сфери застосування датчика. люються у корпусі після встановлення необхідного На чутливому елементі 3 у з устрічному полі зазора між вказаними обмежувачами 19 та чутлирозміщених на корпусі постійних магнітів 5 встановим елементом 3. влена компенсаційна котушка 10, краще у вигляді Постійні магніти 5 виготовляють з плавів, які плоскої індукційної котушки 10, обмотка якої зробмають високі магнітні властивості та проявляють лена, наприклад, з мідного проводу. Вказана костабільність в широкому діапазоні температур. тушка 10 розміщена в чутливому елементі у заТаким матеріалом може бути, наприклад, самарійглибленні так, щоб вона знаходилася на одному кобальтовий плав. рівні із зовнішньою поверхнею чутливого елеменБлок 9- це може бути будь-який відповідний та. Подача живлення до компенсаційної котушки пристрій аналового типу для обробки диференцій10 та до гідромотора 4 здійснюється через металіних сигналів, зокрема він може складатися з двох чний підвіс 2 чутливого елемента 3. випрямлячів 20 та 21, які зроблені по схемі активЧутливий елемент 3 закріплено на підвісові, ного випрямлення високочастотного електричного який складається принаймні з пари пругких і гнучсигналу. Кожен з випрямлячів 20 і 21 має по два ких пластинок 2, розміщених по різні боки від чутвідповідних входи. Прямий вхід - для з'єднання із ливого елемента. Кожна з пластинок 2 підвісу виводом від однієї котушки індуктивності дифереутримується за кінці між двома паралельними нційного датчика положення чутливого елемента пластинами 11, одна з яких за один кінець кріпить3, а інший - для з'єднання з виводом від іншої кося до корпуса 1 датчика (ця пластина на фігурах тушки цього ж датчика положення. Зокрема, пряне показана), а інша своїм протилежним кінцем мий вхід випрямляча 20 з'єднаний із виводом від до чутливого елемента 3. котушки 6 датчика положення, а інший - з виводом У підвіса 2 є особливість, яка полягає в тому, від котушки 7. І навпаки, прямий вхід до випрямлящо він має властивість згинатися, тобто "працює " ча 21 з'єднаний з виводом від котушки 7 датчика на згинання. Підвіс 2 у формі тонкої прямокутної положення, і інший - з виводом від котушки 6 того пластинки виготовляють з матеріалів, яким також ж датчика положення чутливого елемента 3. Ампвластива висока міцність та пругкість. Це може літуда електричного сигналу на виході з випрямбути, наприклад, реній-молібденовий плав. Інша ляча 20 залежить не лише від амплітуди сигналу з особливість підвісу полягає в тому, що його довкотушки 6, але і від різниці між амплітудами сигнажина достатньо мала у порівнянні з шириною. Налів від котушок 6 та 7, а амплітуда сигналу на виприклад, довжина, ширина та товщина підвісу 2 ході з випрямляча 21 залежатиме від амплітуди можуть співвідноситися між собою як 5:15:1 відпосигналу з котушки 7 та від різниці між амплітудами відно. Це істотно підвищує власн у частоту колисигналів з котушок 7 та 6. Виводи активних випрявань підвісу та покращує динамічні властивості млячів 20 та 21 пов'язані зі входами до суматора датчика. 22, на виході якого амплітуда електричного сигнаВказаний підвіс 2 можна також прикріплювати лу пропорційна величині відхилення чутливого до корпуса 1 датчика через перехідник 12 за доелемента, а знак вказує на напрямок відхилення. помогою пругких гн учких балочок 13, які розміщуПри потребі, вивід суматора 22 з'єднують зі вхоють паралельно до вимірювальної вісі Y, причому дом підсилювача 23. їх жорстко прикріплюють одним кінцем до корпуса Навантаженням суматора 22 - підсилювача 23 1, і іншим - до перехідника 12. Кількість балочок 13 є послідовно увімкнуті компенсаційна котушка 10 має бути не меншою за три (на фіг.1 показані кінці магнітоелектричного силового перетворювача та 14 від чотирьох балочок 13) і вони повинні розмівимірювальний резистор 24, з паралельно увіщуватися принаймні у дво х паралельних площимкнутим конденсатором 25. Стала часу RC- кола, нах. Пругкість балочок 13 має перевищувати пругдо якого входять паралельно увімкнуті резистор кість підвісу 2 чутливо го елемента 3. Таке 24 та конденсатор 25, дорівнює: T=RC. розміщення та властивості балочок 13 дозволятиСтала часу Τ відповідає частоті f: f = 1 Чаме переходнику 12 переміщуватися в площині 2pT XOZ, перпендикулярній до вимірювальної вісі, під стота f дорівнює верхній частоті вимірюваних кувпливом ударних сил, які діятимуть на корпус 1 у тових швидкостей. Вимірювальний резистор 24 вказаній площині, що зменшуватиме навантаженз'єднаний зі входом до буферного підсилювача 26, ня на підвіс 2 чутли вого елемента 3. який має коло для встановлення на виході датчика Для обмеження переміщення чутливого елекутової швидкості необхідного масштабу сигналу мента 3 в площині XOZ застосовані обмежувачі: (R масшт.) за допомогою резистора 27 та коло для вздовж вісі Z, для чого у чутливому елементі біля встановлення нульового сигналу за допомогою його центра ваги та вздовж вісі X датчика ( паракоригуючого резистора 28 (R кориг.) на виході булельно вісі симетрії Б-Б чутливого елемента та ферного підсилювача 26 при відсутності впливу на перпендикулярно до вісі А-А, по якій згинається чутливий елемент 3. Живлення на резистор 28 підвіс) зроблене заглиблення 15,/а на корпусі датподається від високо стабільного джерела струму чика -відповідний виступ 16, а також вздовж вісі X ( на фігурах не показано). датчика, для чого біля центра ваги чутливого елеДалі подається детальний опис роботи датчимента 3 перпендикулярно до вісі симетрії Б-Б чутка кутової швидкості. ливого елемента і паралельно з віссю А-А, по якій Для більшої наглядності на фіг.3 представле 9 1207 10 на пов'язана з об'єктом права система координат, сигнал від котушки 7 у формі: u1 = U2 × sinw × t . На на якій точка О - це центр ваги чутли вого елеменвиході випрямляча 20 буде сигнал у формі: (U1 та 3, W - абсолютна кутова швидкість об'єкта, вісь КU2), де U1 та U2 - амплітуди високочастотних кообертання гідромотора (вісь кінетичного моменту ливань сигналів відповідно від котушок 6 та 7, ωкругова частота генератора для живлення котушок H ) направлена вздовж вісі ОХ, вісь підвісу 6 та 7 диференційного датчика положення , t - час, вздовж вісі OZ, а вимірювальною є вісь OY. К
ДивитисяДодаткова інформація
Автори англійськоюLeonenko Serhii Mykolaiovych
Автори російськоюЛеоненко Сергей Николаевич
МПК / Мітки
МПК: G01C 19/00, G01P 9/00
Мітки: система, швидкості, віброзахисту, датчик, кутової
Код посилання
<a href="https://ua.patents.su/6-1207-datchik-kutovo-shvidkosti-ta-sistema-jjogo-vibrozakhistu.html" target="_blank" rel="follow" title="База патентів України">Датчик кутової швидкості та система його віброзахисту</a>
Акселерометр та система його віброзахисту
Номер патенту: 1206
Опубліковано: 15.04.2002
Автори: Шкляр Володимир Петрович, Васильєв Володимир Леонідович, Шервашидзе Володимир Варлаамович, Олексієнко Микола Петрович, Гуменюк Володимир Григорович, Леоненко Сергій Миколайович, Гаврилюк Володимир Леонідович
МПК: G01P 15/13
Мітки: акселерометр, віброзахисту, система
Формула / Реферат:
1. Акселерометр, який містить розміщений за допомогою пружного підвісу чутливий елемент маятникового типу, датчик положення, коло зворотного зв'язку магнітоелектричного силового перетворювача з компенсаційною котушкою та схему для визначення показника прискорення, який відрізняється тим, що чутливий елемент підвішено на пружному підвісі, компенсаційна котушка встановлена на чутливому елементі між розміщеними від неї із зазором плоскими...
Аналоговий датчик кутової швидкості
Номер патенту: 22701
Опубліковано: 07.04.1998
Автори: Поджаренко Володимир Олександрович, Поджаренко Андрій Володимирович, Кучерук Володимир Юрійович, Кулаков Павло Ігорович, Кухарчук Василь Васильович, Михалевич Володимир Маркусович
МПК: G01P 3/42
Мітки: аналоговий, кутової, швидкості, датчик
Формула / Реферат:
Аналоговый датчик угловой скорости, содержащий вал, модулятор светового потока в виде диска, связанный с валом, источник света расположенный перед модулятором, линейный фотоприемник, расположенный напротив источника света по другую сторону модулятора, диафрагму, установленную перед линейным фотоприемником, отличающийся тем, что диафрагма имеет прорезь, форма которой ограничена двумя лучами, которые начинаются в центре модулятора светового...
Датчик кутової швидкості

Номер патенту: 17753
Опубліковано: 20.05.1997
Автори: Поджаренко Володимир Олександрович, Гоменюк Анатолій Сергійович, Кулаков Павло Ігоревич, Кухарчук Василь Васильович, Поджаренко Андрій Володимирович
МПК: G01P 3/42
Мітки: кутової, швидкості, датчик
Формула / Реферат:
Датчик угловой скорости, содержащий источник света, модулятор светового потока в виде диска, в котором выполнены прозрачные и непрозрачные элементы равной угловой ширины, линейный фотоприемник, диафрагму, установленную перед фотоприемником, отличающийся тем, что в него введен второй фотоприемник, сдвинутый относительно первого по отношению к центру модулятора на угол, который в полтора раза больше угловой ширины прозрачных и непрозрачных...
Датчик кутової швидкості для динамічних вимірювань

Номер патенту: 24374
Опубліковано: 17.07.1998
Автори: Михалевич Володимир Маркусович, Кулаков Павло Ігорович, Поджаренко Андрій Володимирович, Кучерук Володимир Юрійович, Поджаренко Володимир Олександрович, Кухарчук Василь Васильович
МПК: G01P 3/42
Мітки: динамічних, кутової, швидкості, вимірювань, датчик
Формула / Реферат:
Датчик угловой скорости для динамических измерений, содержащий источник света, модулятор светового потока, два линейных фотоприемника, диафрагму, установленную перед линейными фотоприемниками, два компаратора напряжений, выходы которых присоединены ко входам элемента ИЛИ, выход которого присоединен к тактовому входу счетного триггера, прямой выход которого присоединен к адресному входу аналогового коммутатора, выходы первого и второго...
Частотний датчик кутової швидкості

Номер патенту: 24398
Опубліковано: 17.07.1998
Автори: Кучерук Володимир Юрійович, Кулаков Павло Ігорович, Поджаренко Володимир Олександрович, Кухарчук Василь Васильович, Поджаренко Андрій Володимирович
Попередній патент: Акселерометр та система його віброзахисту
Наступний патент: Дерев’яна опалубна балка
Випадковий патент: Інгібітори вірусної полімерази