Поплавковий щільномір
Номер патенту: 121169
Опубліковано: 27.11.2017
Автори: Бабич Тарас Петрович, Дубовець Олексій Миколайович, Рубан Наталія Павлівна
Формула / Реферат
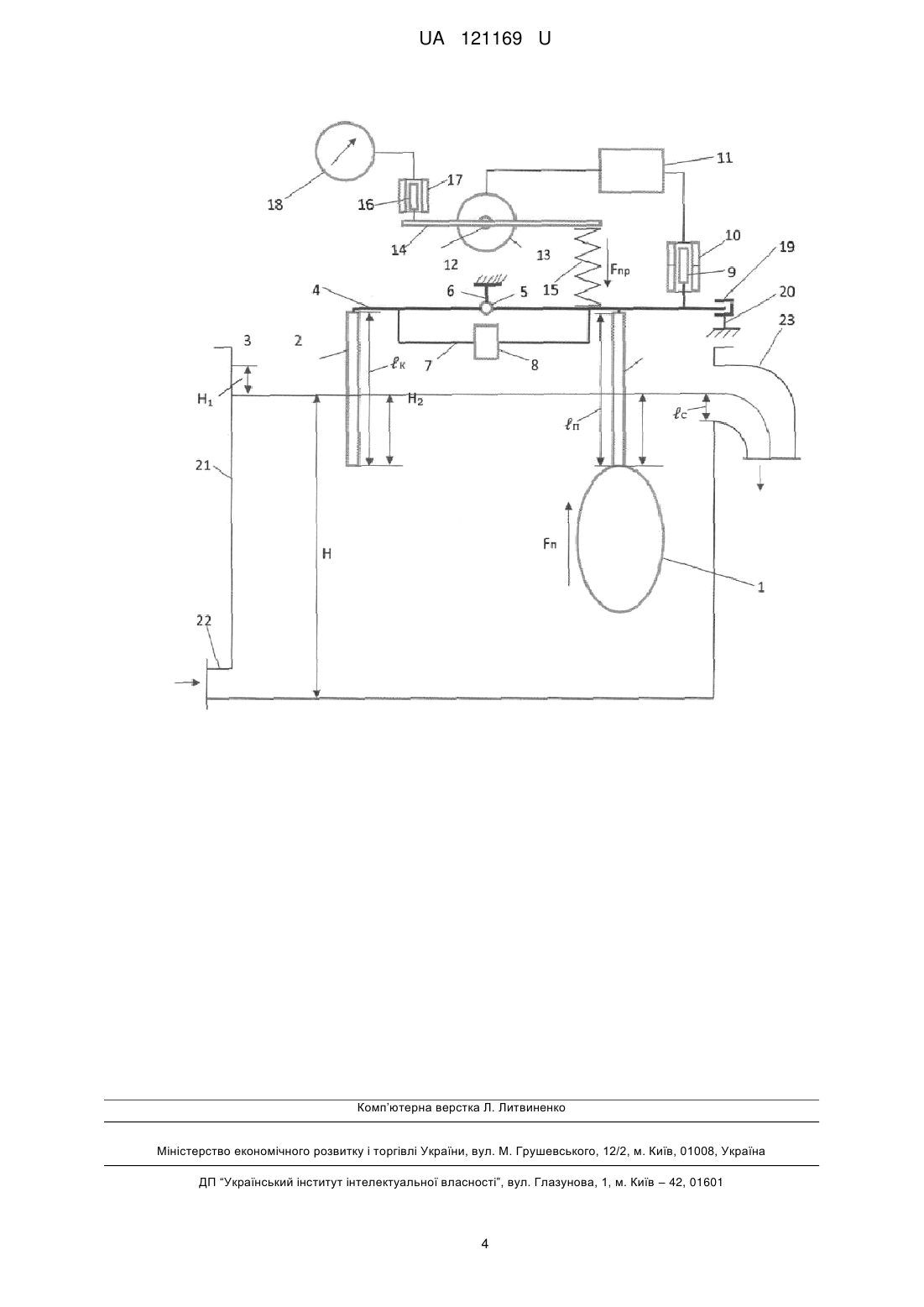
Поплавковий щільномір, що містить приймальну ємність, поплавок, на якому закріплені стрижень поплавка, компенсаційний стрижень, пристрій для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка при зміні щільності контрольованої рідини, перетворювач переміщення поплавка в уніфікований сигнал і вимірювальний прилад, який відрізняється тим, що пристрій для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка містить два (компенсаційний і вимірювальний) двоплечі важелі, перший з яких встановлений на поворотній осі, закріпленій на стаціонарній опорі, другий - на валу реверсивного двигуна, під поворотною віссю і на рівній відстані від осі на компенсаційному важелі закріплена п-подібна напрямна, на якій встановлений контрвантаж з можливістю його переміщення і закріплення в заданому умовами вимірювання положенні, при цьому на правому плечі компенсаційного важеля закріплений стрижень поплавка і плунжер диференційно-трансформаторного перетворювача, а на його лівому плечі - компенсаційний стрижень, праве плече вимірювального стрижня пов'язане з правим плечем компенсаційного стрижня каліброваною пружиною, на лівому плечі вимірювального стрижня закріплений плунжер індукційного перетворювача, вихід диференційно-трансформаторного перетворювача з'єднаний зі входом мікропроцесорного блока, вихід якого з'єднаний з керуючою обмоткою реверсивного двигуна, а вихід індукційного перетворювача з'єднаний з входом вторинного приладу зі шкалою, проградуйованою в одиницях вимірювання щільності контрольованої рідини, при цьому обсяг поплавка і його стрижня вибирається відповідно до умови:
Vп³(pd2/4)=Vcп (max),
де Vп - обсяг поплавка,
d - діаметр стрижня поплавка,
Vcп (max) - обсяг стрижня поплавка при його максимальному зануренні в рідину.
Текст
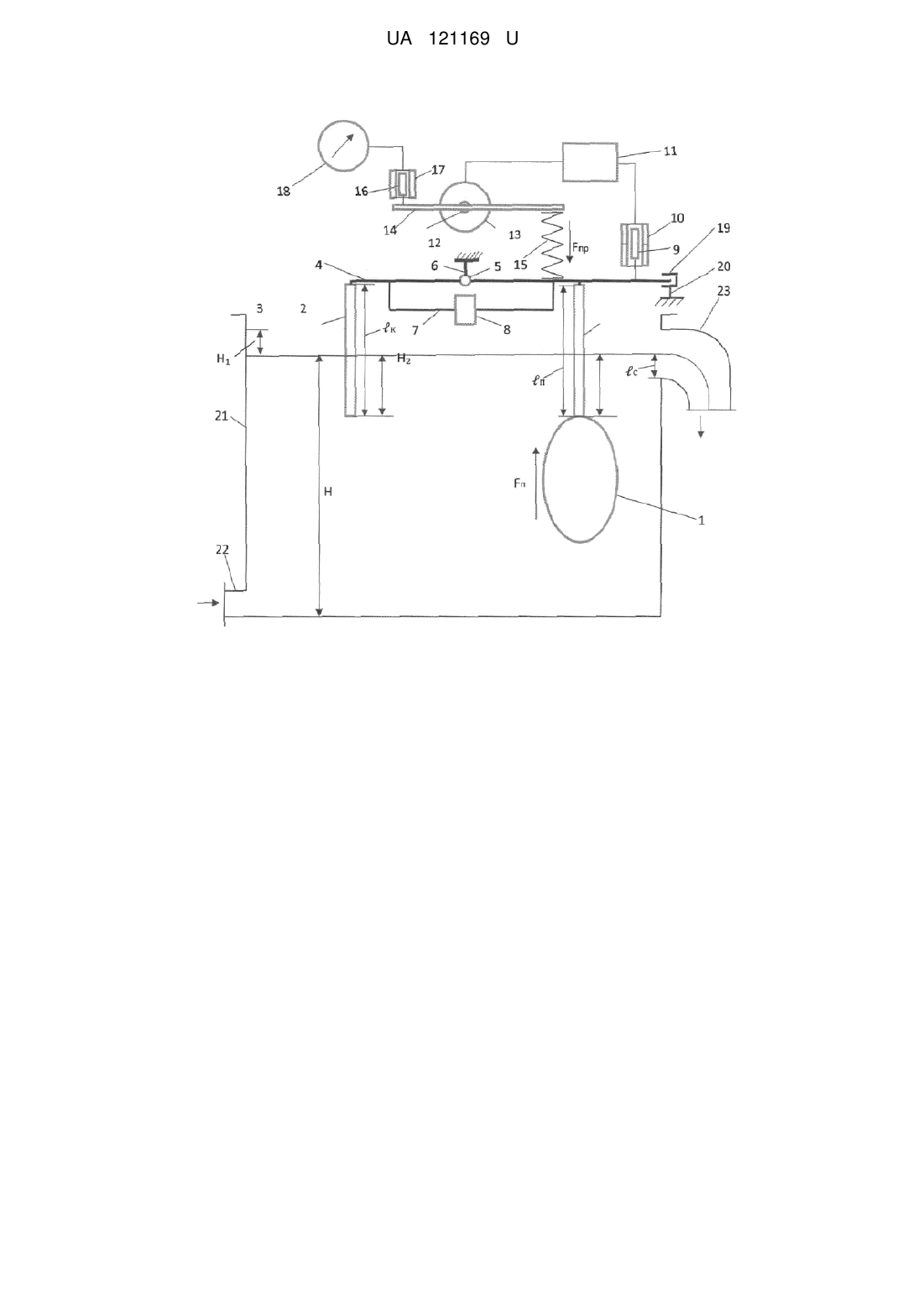
Реферат: Поплавковий щільномір містить приймальну ємність, поплавок, на якому закріплені стрижень поплавка, компенсаційний стрижень, пристрій для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка при зміні щільності контрольованої рідини, перетворювач переміщення поплавка в уніфікований сигнал і вимірювальний прилад. Пристрій для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка містить два (компенсаційний і вимірювальний) двоплечі важелі. Перший встановлений на поворотній осі, закріпленій на стаціонарній опорі, другий - на валу реверсивного двигуна, під поворотною віссю. На рівній відстані від осі на компенсаційному важелі закріплена п-подібна напрямна, на якій встановлений контрвантаж з можливістю його переміщення і закріплення в заданому умовами вимірювання положенні. На правому плечі компенсаційного важеля закріплений стрижень поплавка і плунжер диференційнотрансформаторного перетворювача. На його лівому плечі - компенсаційній стрижень, праве плече вимірювального стрижня пов'язане з правим плечем компенсаційного стрижня каліброваною пружиною. На лівому плечі вимірювального стрижня закріплений плунжер індукційного перетворювача. Обсяг поплавка і його стрижня вибирається відповідно до умови: 2 Vп(d /4)=Vcп (max). UA 121169 U (54) ПОПЛАВКОВИЙ ЩІЛЬНОМІР UA 121169 U UA 121169 U 5 10 15 20 25 30 35 40 45 50 55 60 Пропонована корисна модель належить до вимірювальної техніки і може бути використана в різних галузях промисловості (будівельна, гірська, хімічна та ін.), на підприємствах, де необхідно автоматично вимірювати щільність рідких середовищ. Відомий щільномір для рідини [1], що містить ємність для контрольованої рідини, поплавок з жорстким стрижнем, який з'єднаний з чутливим елементом датчика сил, пружинну нитку, прикріплену до жорсткого стрижня і перекинуту через шків, який може повертатися без тертя на горизонтальній осі, компенсаційний стрижень, який з'єднаний з пружинною ниткою з протилежного відносно до поплавка боці шківа, при цьому конструкція щільноміра забезпечує ідентичність діаметрів жорсткого стрижня і компенсаційного стрижня і матеріалів, з яких стрижні виготовлені. Перевагою даного щільноміра є виключення залежності результатів вимірювання від коливань рівня в зоні контролю (в ємності з контрольованою рідиною, в якій занурено поплавок і компенсаційний стрижень). Недоліками даного щільноміра для рідини є: 1) можливість прослизання нитки на шківі, якщо вона не з'єднана з його поверхнею; 2) при зміні щільності рідини поплавок із закріпленими на ньому жорстким стрижнем і компенсаційним стрижнем, переміщаються в протилежних напрямках, внаслідок чого змінюється глибина їх занурення в рідину, що призводить до виникнення додаткової похибки вимірювання; 3) нитка в процесі експлуатації обов'язково розтягується, що призводить до порушення первинного положення жорсткого і компенсаційного стрижнів - рівного їх занурення в контрольовану рідину. Найбільш близьким за технічною суттю і результатом (прототипом пропонованого щільноміра) є щільномір, що містить приймальну ємність, поплавок, стрижень поплавка, закріплений по поверхні поплавка, компенсаційний стрижень, пристрій для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка при зміні щільності контрольованої рідини і нерухомий датчик сил, при цьому стрижень поплавка і компенсаційний стрижень, встановлені за допомогою осей з можливістю вільного повороту на кінцях протилежних, які мають однакову довжину важелів, важіль, на якому встановлений компенсаційний стрижень, закріплений із забезпеченням перпендикулярності на верхньому з двох паралельно розташованих валів, важіль, на якому встановлений стрижень поплавка, закріплений із забезпеченням перпендикулярності на нижньому валу, паралельні вали кінематично з'єднані зубчастою передачею, яка містить дві ідентичні шестерні, закріплені на протилежних валах. Перевагою даного щільноміра (прототипу) є наявність системи забезпечення рівності занурення компенсаційного стрижня і стрижня поплавка при зміні щільності рідини в приймальній ємності, що виключає додаткові похибки в результатах вимірювання. Недоліками прототипу є: 1) складність кінематичної системи; 2) наявність люфтів в зубчастих зачеплення (передачах); 3) інерційність системи при малих переміщеннях поплавка. Задача корисної моделі є усунення недоліків прототипу: 1) спрощення кінематичної системи; 2) усунення зубчастих зачеплень; 3) мінімізація порога чутливості щільноміра. Задача вирішується наступним чином. Поплавковий щільномір, що містить приймальну ємність, поплавок, на якому закріплений стрижень поплавка, компенсаційний стрижень, пристрій для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка при зміні щільності контрольованої рідини, перетворювач переміщення поплавка в уніфікований сигнал і вимірювальний прилад, який відрізняється тим, що пристрій для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка містить два (компенсаційний і вимірювальний) двоплечі важелі, перший з яких встановлений на поворотній осі, закріпленій на стаціонарній опорі, другий - на валу реверсивного двигуна, під поворотною віссю і на рівній відстані від осі на компенсаційному важелі закріплена п-подібна напрямна, на якій встановлений контрвантаж з можливістю його переміщення і закріплення в заданому умовами вимірювання положенні, при цьому на правому плечі компенсаційного важеля закріплений стрижень поплавка і плунжер диференційно-трансформаторного перетворювача, а на його лівому плечі - компенсаційний стрижень, праве плече вимірювального стрижня пов'язане з правим плечем компенсаційного стрижня каліброваною пружиною, на лівому плечі вимірювального стрижня закріплений плунжер індукційного перетворювача, вихід 1 UA 121169 U 5 10 15 20 25 30 35 40 45 50 55 60 диференційно-трансформаторного перетворювача з'єднаний з входом мікропроцесорного блока, вихід якого з'єднаний з керуючою обмоткою реверсивного двигуна, а вихід індукційного перетворювача з'єднаний з входом вторинного приладу зі шкалою, проградуйованою в одиницях вимірювання щільності контрольованої рідини, при цьому обсяг поплавка і його стрижня вибирається відповідно за умови: 2 Vп(πd /4)=Vcп (max), де Vп - обсяг поплавка, d - діаметр стрижня поплавка, Vcп (max) - обсяг стрижня поплавка при його максимальному зануренні в рідину. Схема пропонованого щільноміра приведена на кресленні. Щільномір містить поплавок 1, піднявши зовнішні краї стрижень 2, компенсаційний стрижень 3, компенсаційний важіль 4, встановлений на поворотній осі 5 закріпленій на стаціонарній опорі 6, п-подібну напрямну 7, закріплену на компенсаційному важелі під поворотною віссю і на рівній від осі відстані, на якій встановлено контрвантаж 8 з можливістю переміщення і закріплення в заданому умовами вимірювання положенні, диференційно-трансформаторний перетворювач 9, 10, мікропроцесорний блок 11 реверсивний двигун 12, на валу 13 якого закріплений вимірювальний важіль 14, калібровану пружину 15, індукційний перетворювач 16, 17, вторинний прилад 18, обмежувач ходу 19, закріплений на стаціонарній опорі 20, приймальну ємність 21, з живильним 22 і розвантажувальним 23 патрубками, при цьому праві плечі компенсаційного 4 і вимірювального 14 важелів з'єднані закріпленою на них пружиною 15, на лівому плечі компенсаційного важеля закріплений компенсаційний стрижень 3, на його правому плечі закріплені стрижень 2 поплавка 1 та плунжер 9 диференційно-трансформаторного перетворювача, переміщень в стаціонарно встановленій котушці 10, на лівому плечі вимірювального важеля закріплений плунжер 16 індукційного перетворювача, що переміщається в стаціонарно встановленій котушці 17. Робота щільноміра здійснюється наступним чином. Щільномір щодо приймальної ємності 21 встановлюється так, щоб глибина занурення Н2 стрижня поплавка 2 і глибина занурення Н1 компенсаційного стрижня 3 (при середньому рівні Н рідини в приймальній ємності) дорівнювали приблизно половині їх довжини (відповідно ℓп і ℓк), що відповідає середній висоті шару рідини ℓс в розвантажувальному патрубку - переливному пристрої 22. За допомогою контрвантажу 8 вимірювальна система приводиться в рівноважний стан (при вибраному діапазоні вимірювання), коли плунжер 9 знаходиться на нейтралі котушки 10 диференційно-трансформаторного перетворювача 9, 10, а його вихідний сигнал дорівнює 0. На результати вимірювання щільності поплавковими густиномірами мають (що приводить до виникнення додаткової похибки) негативно вплинули два фактори: зміна рівня рідини в приймальній ємності і сили поверхневого натягу. Так як конструктивні параметри стрижня 2 поплавка 1 і компенсаційного стрижня 3 їх матеріали ідентичні, то дія зазначених чинників компенсується і вимірювальна система реагує тільки на зміну щільності контрольованої рідини. При незмінній щільності рідини (і зворотному діапазоні вимірювання за допомогою контрвантажу 8) виштовхує сила Fп, діюча на поплавок 1, врівноважується силою стиснення пружини Fпp. При збільшенні щільності рідкого середовища виштовхувальна сила Fп збільшується до величини (F+ΔFп), що призводить до переміщення поплавка вгору (повороту важеля 4 на осі 5 супроти годинникової стрілки), стиску каліброваної пружини 15 і зміщення вгору плунжера 9 в котушці 10, на виході диференційно-трансформаторного перетворювача виникає сигнал розбалансу, що надходить на вхід мікропроцесорного блока 11, сигнал розбалансу посилюється (з урахуванням його "фази"), пускає вхід реверсивний двигун 12, вал 13 якого спільно з вимірювальним важелем 14 повертаються за годинниковою стрілкою, при цьому стискається пружина 15, впливаючи на праве плече вимірювального важеля 4 доти, поки при його повороті щодо осі 5 плунжер 9 не повертається в нейтральне положення, коли вихідний сигнал диференційно-трансформаторного перетворювача стає рівним 0. В процесі стиснення каліброваної пружини 15 (повороту вимірювального важеля 14 за годинниковою стрілкою) переміщується плунжер 16 в котушці 17 індукційного перетворювача, вихід якої з'єднаний з входом вторинного приладу 18 зі шкалою, проградуйованої в одиницях виміру щільності, що відображає поточне значення щільності контрольованої рідини в приймальні ємності 21. При зменшенні щільності контрольованої рідини в приймальні ємності відбуваються зворотні процеси: зменшується сила Fп, діюча на поплавок 1, під дією пружини 15 компенсаційний важіль повертається за годинниковою стрілкою, плунжер 9 диференціальнотрансформаторного перетворювача, закріплений на правому плечі компенсаційного важеля 4 2 UA 121169 U 5 10 15 переміщується вниз відносно котушки 10, вихідний сигнал (протилежної фази) надходить на вхід мікропроцесорного блока 11, який приводить в дію реверсивний двигун 12, вал двигуна повертається спільно з вимірювальним важелем 14 супроти годинникової стрілки, розтягуючи пружину 15, що призводить до повороту компенсаційного важеля 4 проти годинникової стрілки і установці плунжера 9 на нейтралі котушки 10 - до нульового значення вихідного сигналу диференційно-трансформаторного перетворювача, при цьому відбувається зміщення вниз плунжера 16 в котушці 17 індукційного перетворювача і зменшення показань вторинного приладу 18. Вторинний прилад може бути вибраний з вбудованими блоками регулювання і сигналізації, для розширення меж використання пропонованого щільноміра. У порівнянні з прототипом запропонований щільномір має такі переваги: спрощення конструкції пристрою для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка; усунення зубчастих передач і отже, люфтів; зменшення порогу чутливості щільноміра до зміни щільності контрольованої рідини, можливість зміни діапазонів вимірювання. Джерела інформації: 1. Патент України на корисну модель № 77746, кл.G01N9/00, 2013. 2. А.С. СССР № 1608492, кл.G01N9/10. 1980. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 40 Поплавковий щільномір, що містить приймальну ємність, поплавок, на якому закріплені стрижень поплавка, компенсаційний стрижень, пристрій для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка при зміні щільності контрольованої рідини, перетворювач переміщення поплавка в уніфікований сигнал і вимірювальний прилад, який відрізняється тим, що пристрій для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка містить два (компенсаційний і вимірювальний) двоплечі важелі, перший з яких встановлений на поворотній осі, закріпленій на стаціонарній опорі, другий - на валу реверсивного двигуна, під поворотною віссю і на рівній відстані від осі на компенсаційному важелі закріплена п-подібна напрямна, на якій встановлений контрвантаж з можливістю його переміщення і закріплення в заданому умовами вимірювання положенні, при цьому на правому плечі компенсаційного важеля закріплений стрижень поплавка і плунжер диференційно-трансформаторного перетворювача, а на його лівому плечі - компенсаційний стрижень, праве плече вимірювального стрижня пов'язане з правим плечем компенсаційного стрижня каліброваною пружиною, на лівому плечі вимірювального стрижня закріплений плунжер індукційного перетворювача, вихід диференційно-трансформаторного перетворювача з'єднаний зі входом мікропроцесорного блока, вихід якого з'єднаний з керуючою обмоткою реверсивного двигуна, а вихід індукційного перетворювача з'єднаний з входом вторинного приладу зі шкалою, проградуйованою в одиницях вимірювання щільності контрольованої рідини, при цьому обсяг поплавка і його стрижня вибирається відповідно до умови: 2 Vп(d /4)=Vcп (max), де Vп - обсяг поплавка, d - діаметр стрижня поплавка, Vcп (max) - обсяг стрижня поплавка при його максимальному зануренні в рідину. 3 UA 121169 U Комп’ютерна верстка Л. Литвиненко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01N 9/24
Мітки: поплавковий, щільномір
Код посилання
<a href="https://ua.patents.su/6-121169-poplavkovijj-shhilnomir.html" target="_blank" rel="follow" title="База патентів України">Поплавковий щільномір</a>
Щільномір

Номер патенту: 77746
Опубліковано: 25.02.2013
Автори: Дубовець Олексій Миколайович, Литвиненко Ігор Іванович, Тошинський Володимир Ілліч
МПК: G01N 9/00
Мітки: щільномір
Формула / Реферат:
Щільномір, що містить приймальну ємкість, поплавок, стрижень поплавка, закріплений на поверхні поплавка, компенсаційний стрижень, пристрій для забезпечення зв'язку стрижня поплавка з компенсаційним стрижнем і переміщення поплавка при зміні щільності контрольованої рідини і нерухомий датчик сил, який відрізняється тим, що стрижень поплавка і компенсаційний стрижень встановлені за допомогою осей з можливістю вільного поворота на кінцях...
Поплавцевий щільномір
Номер патенту: 118494
Опубліковано: 10.08.2017
Автори: Дзевочко Альона Ігорівна, Кравченко Яна Олегівна, Дубовець Олексій Миколайович, Подустов Михайло Олексійович, Литвиненко Євгенія Ігорівна
МПК: G01N 9/00
Мітки: поплавцевий, щільномір
Формула / Реферат:
Поплавцевий щільномір, що містить приймальну місткість, чутливий поплавцевий елемент, важільно-осьову систему, що забезпечує вертикальне переміщення чутливого елемента, індукційний перетворювач і вторинний прилад, який відрізняється тим, що чутливий елемент щільноміра складається з кільцевого і циліндричного, встановленого усередині кільцевого, поплавців, при цьому кільцевий поплавець встановлений в приймальній місткості щільноміра за...
Поплавковий датчик вмісту заліза магнітного
Номер патенту: 85055
Опубліковано: 11.11.2013
Автори: Цибулевський Юрій Євгенович, Кучер Василь Григорович, Азарян Альберт Арамаісович
МПК: G01N 33/20, G01N 27/00
Мітки: поплавковий, заліза, вмісту, магнітного, датчик
Формула / Реферат:
Поплавковий датчик вмісту заліза магнітного, що містить поплавок, закріплений на датчику положення поплавка, вихід якого з'єднано зі входом мікропроцесора, блок живлення та з'єднувальні провідники, який відрізняється тим, що у корпусі поплавка розміщено електромагніт, з'єднаний з блоком живлення через стабілізатор струму та комутатор, керований вхід якого з'єднано з першим виходом мікропроцесора, другий вихід якого підключено до табло.
Радіоізотопний щільномір

Номер патенту: 29983
Опубліковано: 11.02.2008
Автори: Дубовець Олексій Миколайович, Чернишенко Ніна Олександрівна, Григорова Олена Миколаївна
МПК: G01N 9/24
Мітки: щільномір, радіоізотопний
Формула / Реферат:
Радіоізотопний щільномір, що містить два джерела γ-випромінювання, переривник потоків γ-випромінювання, приймач потоків γ-випромінювання, двигун, вимірювальний прилад, який відрізняється тим, що джерела γ-випромінювання встановлені на поверхні трубопроводу з протилежної відносно приймача потоків випромінювання сторони, переривник потоків γ-випромінювання виконаний у вигляді плоскої Т-подібної пластини з конічним...
Поплавковий густиномір
Номер патенту: 112952
Опубліковано: 10.01.2017
Автори: Потильчак Олексій Петрович, Черепащук Григорій Олександрович, Підгорний Юрій Андрійович
МПК: G01N 9/10
Мітки: поплавковий, густиномір
Формула / Реферат:
Поплавковий густиномір, що містить поплавок, трос і вимірювальний блок у вигляді тензометричного датчика, який відрізняється тим, що поплавок виконаний у вигляді пустотілої посудини, яка герметично закривається, з вантажем змінної маси і підвішений за допомогою троса до вушка, що знаходиться в центрі зовнішньої сторони вимірювальної частини тензометричного датчика, яка являє собою пружну мембрану з наклеєними на її внутрішній стороні...
Попередній патент: Спосіб діагностики розвитку атеросклерозу
Наступний патент: Фіксуючий пристрій для взуття
Випадковий патент: Спосіб одержання стабільного при зберіганні біодизельного пального