Асинхронний електропривід тепловоза



Формула / Реферат
Асинхронний електропровід тепловоза, що містить перетворювачі частоти, до виходів яких підключені асинхронні тягові двигуни, синхронний генератор з підключеним до його виходу випрямлячем, з яким з'єднані силові входи перетворювачів частоти, регулятор струму збудження синхронного генератора, перший блок порівняння, підключений входом до виходу блока вибору мінімального сигналу, котрий входами з'єднаний з виходами датчиків частоти обертання асинхронних тягових двигунів і інтегратор, підключений входом до виходу блока вибору мінімального сигналу, причому перетворювачі частоти керуючими входами з'єднані з виходами блоків формування керуючих імпульсів, підключених входами до виходів суматорів, входи яких з'єднані з виходом інтегратора і виходами задатчиків зміни інтенсивності сигналів, підключених входами до виходів блока завдання ковзання і тригерів, які одним входом з'єднані з виходами других блоків порівняння, підключених входами до виходів відповідних блоків формування керуючих імпульсів і датчиків частоти обертання асинхронних тягових двигунів, котрі з'єднані виходами з одними із входів третіх блоків порівняння, інші входи яких підключені до виходу інтегратора, а також датчики зміни швидкості ковзання, блок завдання зміни швидкості ковзання, елементи АБО, блок вибору максимального сигналу і п'ятий блок порівняння, причому датчики зміни швидкості ковзання підключені входами до виходів датчиків частоти обертання асинхронних тягових двигунів, а виходами - до входів блока вибору максимального сигналу і одним із входів четвертих блоків порівняння, інші входи яких з'єднані з виходом блока завдання зміни швидкості ковзання, а виходи - з одними із входів елементів АБО, інші входи яких підключені до виходів третіх блоків порівняння, а виходи - до інших входів тригерів, причому виходи блоків вибору максимального сигналу і завдання зміни швидкості ковзання з'єднані з входами п'ятого блока порівняння, до виходу якого підключено один із входів елемента АБО, з'єднаного іншим входом з виходом першого блока порівняння, а виходом - з входом регулятора струму збудження синхронного генератора, який відрізняється тим, що він забезпечений датчиками струмів асинхронних тягових двигунів, вимірювальні входи яких підключено між виходами перетворювачів частоти та живлячими входами асинхронних тягових двигунів, а також блоком керування, входи якого підключено до виходів датчиків струмів асинхронних тягових двигунів, а виходи - до других входів блоків формування керуючих імпульсів.
Текст
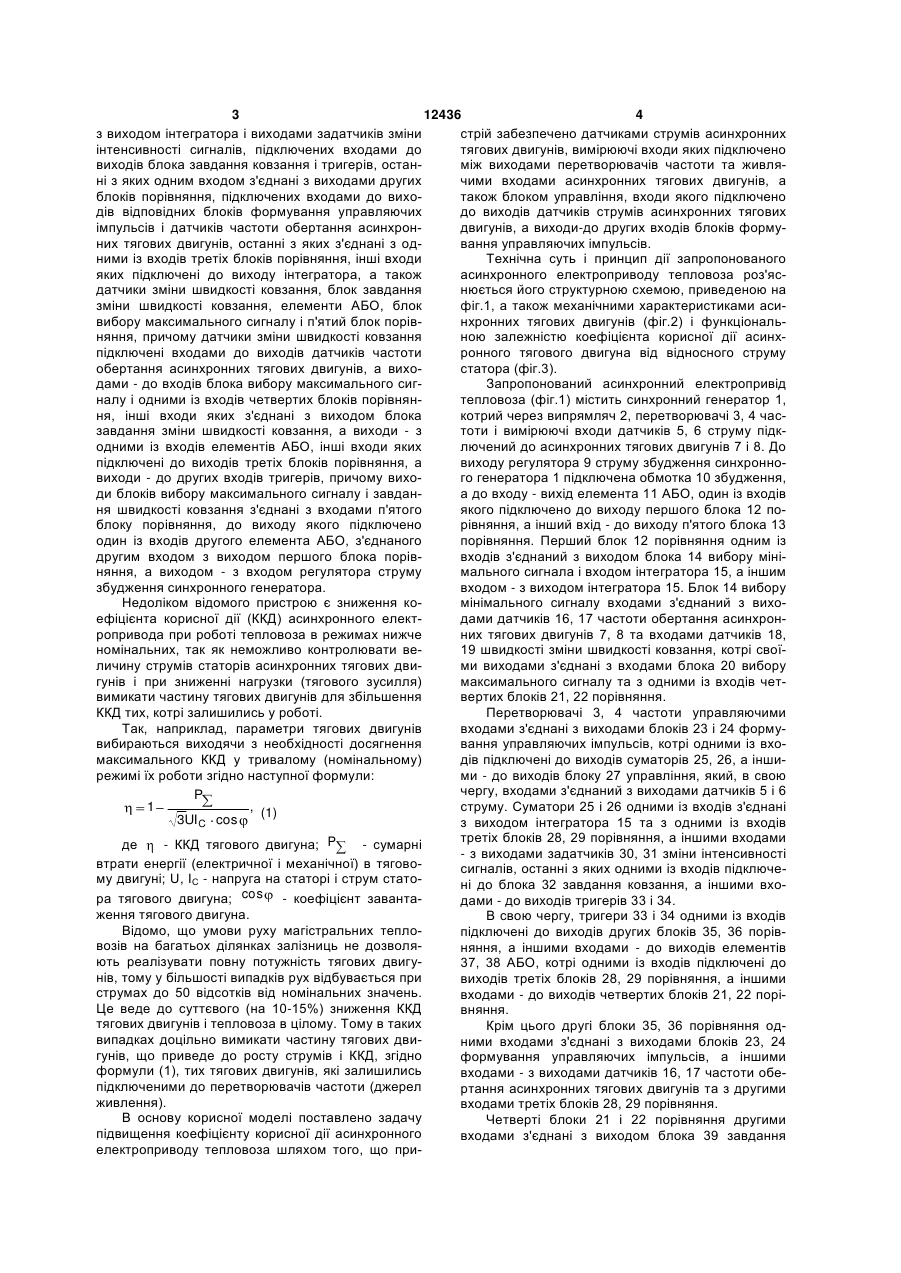
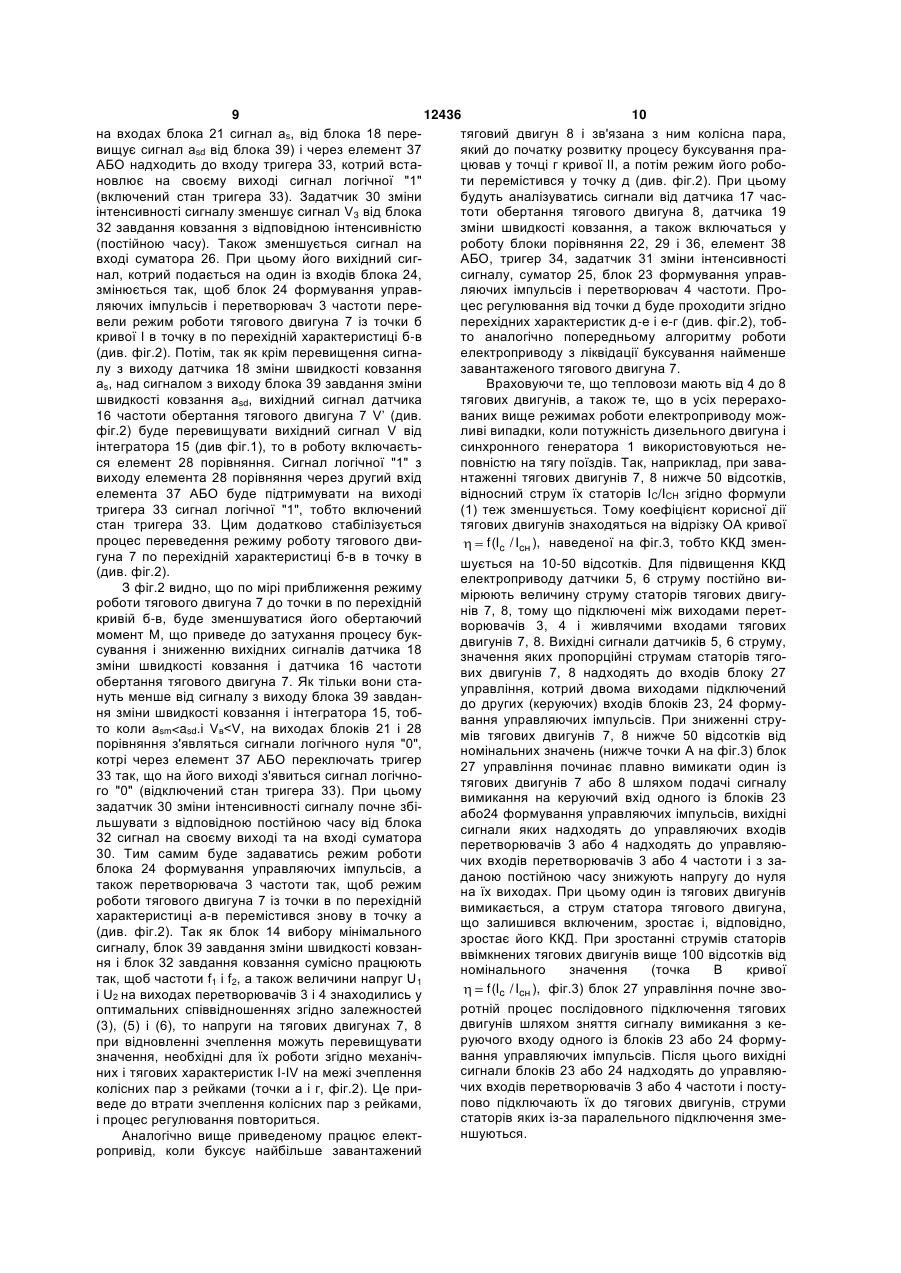
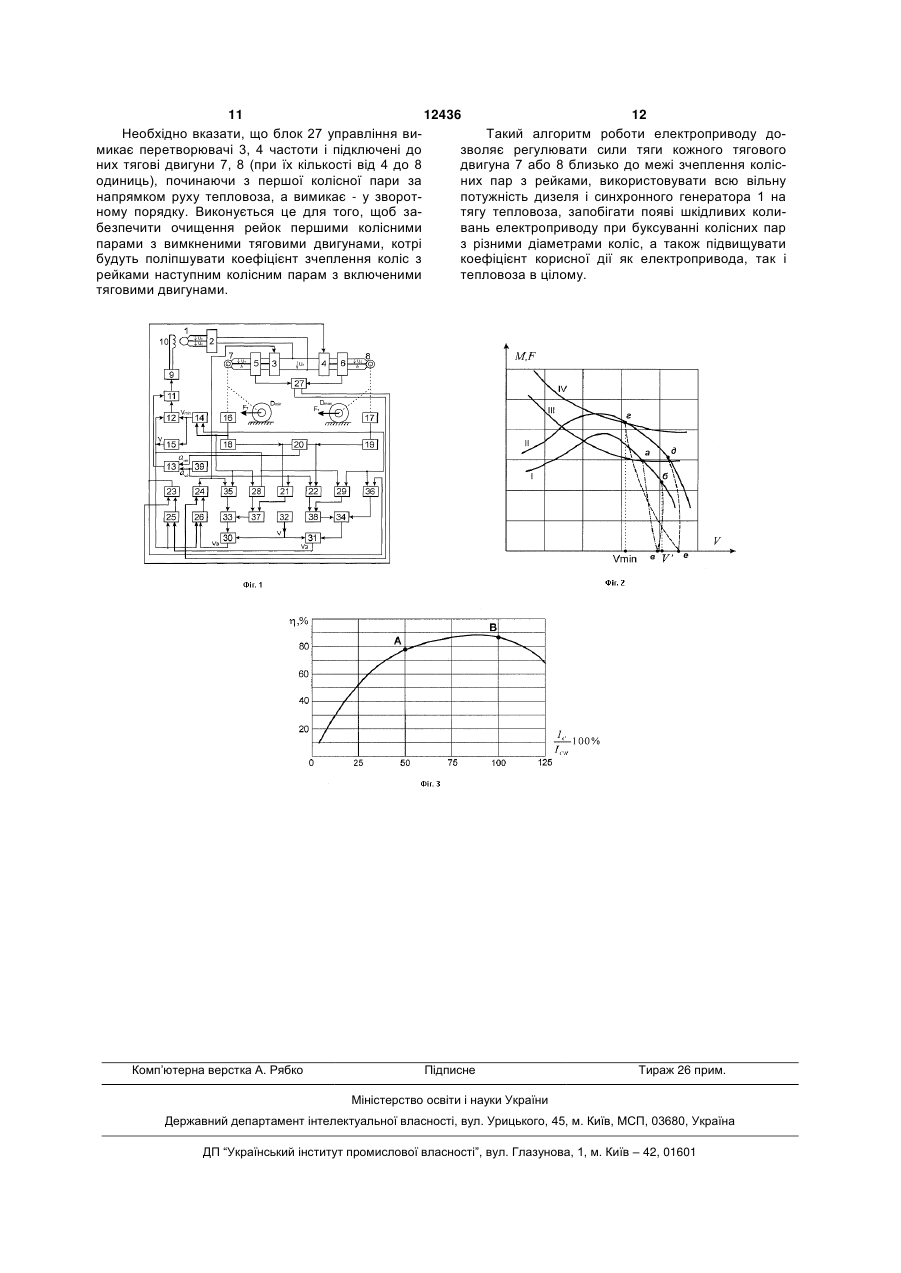
Асинхронний електропровід тепловоза, що містить перетворювачі частоти, до виходів яких підключені асинхронні тягові двигуни, синхронний генератор з підключеним до його виходу випрямлячем, з яким з'єднані силові входи перетворювачів частоти, регулятор струму збудження синхронного генератора, перший блок порівняння, підключений входом до виходу блока вибору мінімального сигналу, котрий входами з'єднаний з виходами датчиків частоти обертання асинхронних тягових двигунів і інтегратор, підключений входом до виходу блока вибору мінімального сигналу, причому перетворювачі частоти керуючими входами з'єднані з виходами блоків формування керуючих імпульсів, підключених входами до виходів суматорів, входи яких з'єднані з виходом інтегратора і виходами задатчиків зміни інтенсивності сигналів, підключених входами до виходів блока завдання ковзання і тригерів, які одним входом з'єднані з виходами других блоків порівняння, підключених входами до виходів відповідних блоків формування керуючих імпульсів і датчиків частоти обертання асинхронних тягових двигунів, котрі з'єднані виходами з одними із входів третіх бло U 2 12436 1 3 12436 4 з виходом інтегратора і виходами задатчиків зміни стрій забезпечено датчиками струмів асинхронних інтенсивності сигналів, підключених входами до тягових двигунів, вимірюючі входи яких підключено виходів блока завдання ковзання і тригерів, останміж виходами перетворювачів частоти та живляні з яких одним входом з'єднані з виходами других чими входами асинхронних тягових двигунів, а блоків порівняння, підключених входами до вихотакож блоком управління, входи якого підключено дів відповідних блоків формування управляючих до виходів датчиків струмів асинхронних тягових імпульсів і датчиків частоти обертання асинхрондвигунів, а виходи-до других входів блоків формуних тягових двигунів, останні з яких з'єднані з одвання управляючих імпульсів. ними із входів третіх блоків порівняння, інші входи Технічна суть і принцип дії запропонованого яких підключені до виходу інтегратора, а також асинхронного електроприводу тепловоза роз'ясдатчики зміни швидкості ковзання, блок завдання нюється його структурною схемою, приведеною на зміни швидкості ковзання, елементи АБО, блок фіг.1, а також механічними характеристиками асивибору максимального сигналу і п'ятий блок порівнхронних тягових двигунів (фіг.2) і функціональняння, причому датчики зміни швидкості ковзання ною залежністю коефіцієнта корисної дії асинхпідключені входами до виходів датчиків частоти ронного тягового двигуна від відносного струму обертання асинхронних тягових двигунів, а вихостатора (фіг.3). дами - до входів блока вибору максимального сигЗапропонований асинхронний електропривід налу і одними із входів четвертих блоків порівнянтепловоза (фіг.1) містить синхронний генератор 1, ня, інші входи яких з'єднані з виходом блока котрий через випрямляч 2, перетворювачі 3, 4 часзавдання зміни швидкості ковзання, а виходи - з тоти і вимірюючі входи датчиків 5, 6 струму підкодними із входів елементів АБО, інші входи яких лючений до асинхронних тягових двигунів 7 і 8. До підключені до виходів третіх блоків порівняння, а виходу регулятора 9 струму збудження синхронновиходи - до других входів тригерів, причому вихого генератора 1 підключена обмотка 10 збудження, ди блоків вибору максимального сигналу і завдана до входу - вихід елемента 11 АБО, один із входів ня швидкості ковзання з'єднані з входами п'ятого якого підключено до виходу першого блока 12 поблоку порівняння, до виходу якого підключено рівняння, а інший вхід - до виходу п'ятого блока 13 один із входів другого елемента АБО, з'єднаного порівняння. Перший блок 12 порівняння одним із другим входом з виходом першого блока поріввходів з'єднаний з виходом блока 14 вибору мініняння, а виходом - з входом регулятора струму мального сигнала і входом інтегратора 15, а іншим збудження синхронного генератора. входом - з виходом інтегратора 15. Блок 14 вибору Недоліком відомого пристрою є зниження комінімального сигналу входами з'єднаний з вихоефіцієнта корисної дії (ККД) асинхронного електдами датчиків 16, 17 частоти обертання асинхронропривода при роботі тепловоза в режимах нижче них тягових двигунів 7, 8 та входами датчиків 18, номінальних, так як неможливо контролювати ве19 швидкості зміни швидкості ковзання, котрі своїличину струмів статорів асинхронних тягових двими виходами з'єднані з входами блока 20 вибору гунів і при зниженні нагрузки (тягового зусилля) максимального сигналу та з одними із входів четвимикати частину тягових двигунів для збільшення вертих блоків 21, 22 порівняння. ККД тих, котрі залишились у роботі. Перетворювачі 3, 4 частоти управляючими Так, наприклад, параметри тягових двигунів входами з'єднані з виходами блоків 23 і 24 формувибираються виходячи з необхідності досягнення вання управляючих імпульсів, котрі одними із вхомаксимального ККД у тривалому (номінальному) дів підключені до виходів суматорів 25, 26, а інширежимі їх роботи згідно наступної формули: ми - до виходів блоку 27 управління, який, в свою чергу, входами з'єднаний з виходами датчиків 5 і 6 P струму. Суматори 25 і 26 одними із входів з'єднані 1 , (1) 3UI C cos з виходом інтегратора 15 та з одними із входів третіх блоків 28, 29 порівняння, а іншими входами P де - ККД тягового двигуна; - сумарні - з виходами задатчиків 30, 31 зміни інтенсивності втрати енергії (електричної і механічної) в тяговосигналів, останні з яких одними із входів підключему двигуні; U, ІС - напруга на статорі і струм статоні до блока 32 завдання ковзання, а іншими вхора тягового двигуна; cos - коефіцієнт завантадами - до виходів тригерів 33 і 34. ження тягового двигуна. В свою чергу, тригери 33 і 34 одними із входів Відомо, що умови руху магістральних теплопідключені до виходів других блоків 35, 36 поріввозів на багатьох ділянках залізниць не дозволяняння, а іншими входами - до виходів елементів ють реалізувати повну потужність тягових двигу37, 38 АБО, котрі одними із входів підключені до нів, тому у більшості випадків рух відбувається при виходів третіх блоків 28, 29 порівняння, а іншими струмах до 50 відсотків від номінальних значень. входами - до виходів четвертих блоків 21, 22 поріЦе веде до суттєвого (на 10-15%) зниження ККД вняння. тягових двигунів і тепловоза в цілому. Тому в таких Крім цього другі блоки 35, 36 порівняння одвипадках доцільно вимикати частину тягових двиними входами з'єднані з виходами блоків 23, 24 гунів, що приведе до росту струмів і ККД, згідно формування управляючих імпульсів, а іншими формули (1), тих тягових двигунів, які залишились входами - з виходами датчиків 16, 17 частоти обепідключеними до перетворювачів частоти (джерел ртання асинхронних тягових двигунів та з другими живлення). входами третіх блоків 28, 29 порівняння. В основу корисної моделі поставлено задачу Четверті блоки 21 і 22 порівняння другими підвищення коефіцієнту корисної дії асинхронного входами з'єднані з виходом блока 39 завдання електроприводу тепловоза шляхом того, що при 5 12436 6 зміни швидкості ковзання та з одним із виходів пару з найменшим діаметром коліс Dmin (відповіддатчиків 18, 19 зміни швидкості ковзання. но тяговий двигун 7). Такий розподіл тягових двиНа фіг.2 приведені механічні характеристики гунів випливає з відомих формул для розрахунку найменше і найбільше завантажених асинхронних тягових зусиль на ободах рухаючих колісних пар тягових двигунів 7, 8 (криві І і II), а також залежнота закону регулювання напруги і частоти живлення сті сили тяги F від лінійної швидкості V тепловоза асинхронних тягових двигунів 7, 8 від автономних на межі зчеплення колісних пар з рейками (криві джерел живлення кінцевої потужності, якими в ІІІ, IV), котрі зв'язані з найменше і найбільше завасукупності є синхронний генератор 1, котрий принтаженими асинхронними тяговими двигунами 7, водиться дизельним двигуном тепловоза, випрям8. Крім цього на фіг.2 приведені перехідні механічляч 2 та перетворювачі 3 і 4. Вищевикладене вині характеристики асинхронних тягових двигунів значається за наступними формулами: (криві а-в, б-в, д-е і г-е). 2M i 2M i F1 ; F2 (2) На фіг.3 показана залежність ККД асинхронноD min D max го тягового двигуна від відносного активного U1 f1 M1 струму статора І’C / І’СН, , U2 f 2 M2 (3) cos н ; н - номіде: ' C IC cos ; ' СН СН де F1, F2, M1, M2 - відповідно тягові зусилля та нальні значення струму статора і коефіцієнта заобертаючі моменти тягових двигунів 7 (найменше вантаження тягового двигуна. завантаженого) і 8 (найбільше завантаженого); U1, Тяговий генератор 1 являє собою синхронний U2, f1, f2 - відповідно напруги і частоти на виході генератор змінного струму, а тягові двигуни 7 і 8 перетворювача 3, який живить найменше заванасинхронні двигуни з коротко замкнутим ротором. тажений тяговий двигун 7, і 4 - який живить найбіВипрямляч 2 може бути виконаний на некерованих льше завантажений тяговий двигун 8; D - діаметр діодах по мостовій схемі. Перетворювачі частоти 3 колісної пари; і - передавальне число тягових реі 4 можуть бути виконані на біполярних транзистодукторів, встановлених між роторами тягових двирах з ізольованими затворами (IGBT - транзистогунівта осями колісних пар. ри). Регулятор 9 струму збудження синхронного Відповідно до формул (2) і (3) на фіг. 2 привегенератора може являти собою як магнітний піддені механічні характеристики найменше і найбісилювач, так і кероване джерело живлення (тирильше завантажених тягових двигунів 7 і 8 (відповісторний або транзисторний варіант). Блоки 23, 24 дно криві І і II), а також залежності сили тяги F від формування управляючих імпульсів можуть бути лінійної швидкості тепловоза V на межі зчеплення виконані на аналого-цифрових перетворювачах з колісних пар з рейками (крива III - для тягового імпульсним виходом. двигуна 7, а крива IV - для тягового двигуна 8), Як датчики 16, 17 частоти обертання асинхкотрі побудовані з урахуванням наступних форронних тягових двигунів можуть використовуватимул: ся тахогенератори, а як датчики 18, 19 зміни швидкості ковзання - диференційні елементи. 2 D max 1 D min V VS1 VS2 ; (4) Датчиками 5 і 6 струму являються вимірюючі тран2i 2i сформатори. Решта елементів і блоків, за винят2 f1(1 S1 ) 2 f 2 (1 S 2 ) ком тригерів 33 і 34, а також елементів 11, 37 і 38 ; 2 (5) 1 P P АБО, котрі виконуються на цифрових мікросхемах, де V - лінійна швидкість тепловоза; 1, 2 можуть бути виконані на операційних підсилювачах та компараторах постійного струму. частота обертання тягових двигунів 7, 8; S1, S2 Необхідно відмітити, що управління синхронпрослизання роторів тягових двигунів 7, 8; Р - кільним генератором 1, випрямлячем 2, перетворювакість пар полюсів статорної обмотки тягових двичами 3, 4 частоти, асинхронними тяговими двигугунів 7, 8; VS1 , VS2 - швидкості ковзання колісних нами 7, 8 регулятором 9 струму збудження пар відносно рейок. синхронного генератора та блоками 23, 24 формуОтже регулятором 9 струму збудження синхвання управляючих імпульсів можна забезпечити ронного генератора 1 в обмотці 10 збудження заяк за допомогою апаратних засобів, так і у вигляді дається струм, якому відповідає певна величина управляючої програми, записаної в пам'ять мікронапруги UC і струму IC на виході синхронного генеЕОМ. ратора 1 таким чином, щоб для заданного рівня Запропонований асинхронний електропровід потужності дизельного двигуна або сили тяги теппрацює в автоматичному режимі за таким алгориловоза виконувалось співвідношення тмом, який забезпечує найбільш можливі силу тяги 3Uc Ic cos const. (6) сг і коефіцієнт корисної дії тепловоза при випадкових Після випрямлення змінного струму ІC синхзмінах коефіцієнта зчеплення колісних пар з рейронного генератора 1 випрямлячем 2 на його виками та допустимих в експлуатації різниці діаметході з'являється напруга Ud пропорційна напрузі рів коліс від Dmin до Dmax, котра складає UC. При цьому на виході перетворювача 4, який =12мм. У подальшому для поясD Dmax Dmin живить найбільше завантажений тяговий двигун 8, нення роботи асинхронного електропривода тепнапругу U2 збільшують до порушення зчеплення ловоза приймемо, що найбільше навантаженим колісної пари з рейками, яка приводиться в обербуде тяговий двигун, який приводе в обертання тання цим тяговим двигуном. Аналогічно, на виході колісну пару з найбільшим діаметром коліс Dmax перетворювача 3, який живить найменше заван(нехай це буде тяговий двигун 8), а найменше затажений тяговий двигун 7, збільшують частоту f1, вантаженим - який приводе в обертання колісну 7 12436 8 теж до моменту порушення зчеплення колісної Таким чином, при появі буксування колісних пари з рейками. Як тільки це відбудеться, то тягові пар і з'єднаних з ними тягових двигунів 7 або 8 двигуни 7 і 8, які до цього моменту працювали відчерез елемент 11 АБО сигнал логічної одиниці "1" повідно у точках а і г кривих І і II, почнуть збільшупоступає на вхід регулятора 9 струму збудження вати швидкість обертання із-за втрати зчеплення синхронного генератора 1 спочатку з виходу блока колісних пар з рейками, а також зниження момен13 порівняння для забезпечення з даною інтенситів навантаження і режими їх роботи перемістятьвністю зниження напруги UC на виході синхронного ся із точок a і г в точки б і д (див. фіг.2). При цьому генератора 1, випрямляча 2 (Ud) і, відповідно, нарегулювання співвідношень напруг і частот на випруг U1 і U2 живлення тягових двигунів 7 і 8 від ході перетворювачів 3 і 4 відбувається згідно фоперетворювачів 3 і 4 частоти. Це зроблено для рмули (3). У подальшому робота електроприводу того, щоб збільшити бистродію електроприводу по відбувається таким чином: сигнали від датчиків 16 усуненню буксування колісних пар, так як додаткоі 17 частоти обертання асинхронних тягових двиво постійна часу по каналу контролю зміни швидгунів 7, 8 надходять до входів блока 14 вибору кості ковзання (прискорення) від блока 13 порівмінімального сигналу і до входів блоків 28, 29, 35 і няння вибирається значно меншою, ніж по каналу 36 порівняння. В блоці 14 сигнали від датчиків 16 і контролю ковзання від блока 12 порівняння, який 17 частоти обертання тягових двигунів порівнювключається у роботу пізніше і діє через другий ються меж собою і на його виході з'являється сигвхід елемента 11 АБО. Крім цього, з метою поліпнал Vmin - (див. фіг.2), який пропорційний частоті шення динаміки перехідних процесів в електропобертання ротора найбільше завантаженого тягориводі на другі входи блоків 21, 22 порівняння пового двигуна 8 (формула 4), і подається на вхід дається сигнал від блока 39 завдання зміни інтегратора 15 та на входи блока 12 порівняння. швидкості ковзання аsd, на одні із входів блоків 35, Оскільки тяговий двигун 8 періодично може знахо36 порівняння подаються сигнали з виходів датчидитися в режимі буксування, і лінійна швидкість на ків 16, 17, а на інші входи блоків 35, 36 - сигнали з ободі колісної пари із-за її прослизання по рейкам виходів блоків 23, 24 формування управляючих не буде відповідати лінійній швидкості тепловоза імпульсів, котрі пропорційні частоті напруги на виVmin, то вихідний сигнал V інтегратора 15 точніше ході перетворювачів 3 і 4 і, відповідно, на входах відповідає лінійній швидкості тепловоза. Потім тягових двигунів 7 і 8. Блоки 21, 22, 35 і 36 поріввихідний сигнал V інтегратора 15 надходить на няння працюють аналогічно блокам 13, 28 і 29 повходи суматорів 25 і 26 і на одні із входів блоків рівняння як компаратори і при перевищенні вхід28, 29 порівняння, котрі працюють у режимі компаних сигналів заданих значень на їх виходах раторів (порівнювачів). Якщо вихідні сигнали від формуються сигнали логічної одиниці "1", а в продатчиків 16 або 17 частоти обертання тягових двитилежному випадку - сигнали логічного нуля "0". гунів 7 або 8, які надходять на інші входи блоків Таким чином, вихідні сигнали блоків 28 і 21, а 28, 29 порівняння, перевищують сигнал V з вихода також 22 і 29 порівняння надходять відповідно до інтегратора 15, то на одному із виходів блоків 28 входів елементів 37 і 38 АБО і з їх виходів до одноабо 29 порівняння сформується сигнал логічної го із входів тригерів 33 і 34, на інші входи яких наодиниці "1". Необхідно відмітити, що при рівних дходять сигнали з виходів блоків 35 і 36 порівнянсигналах, або коли сигнал V з виходу інтегратора ня. Вихідні сигнали тригерів 35 і 36 надходять до 15 перевищує вищевказані сигнали датчиків 16 керуючих входів задатчиків 30 і 31 зміни інтенсивабо 17 частоти обертання частоти обертання тяності сигналів. В початковому стані на виходах гових двигунів 7 або 8, то на виході відповідного тригерів 33, 34 встановлюється сигнал логічного блока 28 або 29 встановлюється сигнал логічного нуля "0". Потім, наприклад, якщо колісна пара і нуля "О". зв'язаний з нею найменше завантажений тяговий Одночасно сигнали з виходів датчиків 16 і 17 двигун 7, який до цього часу працював у точці а частоти обертання тягових двигунів 7, 8 надходять кривої І (див. фіг.2), почне збільшувати швидкість на входи датчиків 18 і 19 зміни швидкості ковзанобертання із-за втрати зчеплення колісної пари з ня, вихідні сигнали яких надходять на входи блока рейками, то його режим роботи переміститься в 20 вибору максимального сигналу і одні із входів точку б кривої І. При цьому, у першу чергу, вихідблоків 21, 22 порівняння. При цьому на виході ний сигнал від блока 20 вибору максимального блока 20 формується максимальний із сигналів від сигналу аsm перевищить сигнал з виходу блока 39 датчиків 18 або 19 зміни швидкості ковзання аsm, завдання зміни швидкості ковзання аsd (допустикотрий фактично є сигналом, пропорційним найбімий сигнал прискорення колісної пари), і на виході льшому прискоренню однієї з буксуючих колісних блока 13 порівняння з'явиться сигнал логічної одипар і з'єднаного з нею тягового двигуна. Цей сигниці "1", котрий через елемент 11 АБО почне діяти нал поступає на один із входів блока 13 порівнянна вхід регулятора 9 струму збудження синхронноня, на інший вхід якого подається сигнал з виходу го генератора 1 і знижувати струм і в обмотці 10 блока 39 завдання зміни швидкості ковзання аsd, збудження. Це приведе до зниження напруги UC на котрий являється максимально допустимим сигнавиході синхронного генератора 1, випрямляча 2 лом прискорення колісних пар і з'єднаних з ними (Ud) і на виході перетворювачів 3 і 4 U1 і U2. Тим тягових двигунів. самим почнеться ліквідація процесу буксування Блок 13 порівняння теж являється компаратотягового двигуна 7. Необхідно вказати, що для ром, котрий на своєму виході формує сигнал логіприскорення ліквідації буксування тягового двигучної одиниці "І" при аsm>аsd. В іншому випадку на на 7, тобто поліпшення динамічних характеристик виході блока 13 встановлюється сигнал логічного електроприводу, додатково на виході блока 21 нуля "0". порівняння з'являється сигнал логічної "1" (так як 9 12436 10 на входах блока 21 сигнал аs, від блока 18 перетяговий двигун 8 і зв'язана з ним колісна пара, вищує сигнал аsd від блока 39) і через елемент 37 який до початку розвитку процесу буксування праАБО надходить до входу тригера 33, котрий встацював у точці г кривої II, а потім режим його робоновлює на своєму виході сигнал логічної "1" ти перемістився у точку д (див. фіг.2). При цьому (включений стан тригера 33). Задатчик 30 зміни будуть аналізуватись сигнали від датчика 17 часінтенсивності сигналу зменшує сигнал V3 від блока тоти обертання тягового двигуна 8, датчика 19 32 завдання ковзання з відповідною інтенсивністю зміни швидкості ковзання, а також включаться у (постійною часу). Також зменшується сигнал на роботу блоки порівняння 22, 29 і 36, елемент 38 вході суматора 26. При цьому його вихідний сигАБО, тригер 34, задатчик 31 зміни інтенсивності нал, котрий подається на один із входів блока 24, сигналу, суматор 25, блок 23 формування управзмінюється так, щоб блок 24 формування управляючих імпульсів і перетворювач 4 частоти. Проляючих імпульсів і перетворювач 3 частоти перецес регулювання від точки д буде проходити згідно вели режим роботи тягового двигуна 7 із точки б перехідних характеристик д-е і е-г (див. фіг.2), тобкривої І в точку в по перехідній характеристиці б-в то аналогічно попередньому алгоритму роботи (див. фіг.2). Потім, так як крім перевищення сигнаелектроприводу з ліквідації буксування найменше лу з виходу датчика 18 зміни швидкості ковзання завантаженого тягового двигуна 7. аs, над сигналом з виходу блока 39 завдання зміни Враховуючи те, що тепловози мають від 4 до 8 швидкості ковзання аsd, вихідний сигнал датчика тягових двигунів, а також те, що в усіх перерахо16 частоти обертання тягового двигуна 7 V’ (див. ваних вище режимах роботи електроприводу можфіг.2) буде перевищувати вихідний сигнал V від ливі випадки, коли потужність дизельного двигуна і інтегратора 15 (див фіг.1), то в роботу включаєтьсинхронного генератора 1 використовуються неся елемент 28 порівняння. Сигнал логічної "1" з повністю на тягу поїздів. Так, наприклад, при зававиходу елемента 28 порівняння через другий вхід нтаженні тягових двигунів 7, 8 нижче 50 відсотків, елемента 37 АБО буде підтримувати на виході відносний струм їх статорів IC/IСН згідно формули тригера 33 сигнал логічної "1", тобто включений (1) теж зменшується. Тому коефіцієнт корисної дії стан тригера 33. Цим додатково стабілізується тягових двигунів знаходяться на відрізку ОА кривої процес переведення режиму роботу тягового двиf (Ic / Icн ), наведеної на фіг.3, тобто ККД зменгуна 7 по перехідній характеристиці б-в в точку в шується на 10-50 відсотків. Для підвищення ККД (див. фіг.2). електроприводу датчики 5, 6 струму постійно виЗ фіг.2 видно, що по мірі приближення режиму мірюють величину струму статорів тягових двигуроботи тягового двигуна 7 до точки в по перехідній нів 7, 8, тому що підключені між виходами переткривій б-в, буде зменшуватися його обертаючий ворювачів 3, 4 і живлячими входами тягових момент М, що приведе до затухання процесу букдвигунів 7, 8. Вихідні сигнали датчиків 5, 6 струму, сування і зниженню вихідних сигналів датчика 18 значення яких пропорційні струмам статорів тягозміни швидкості ковзання і датчика 16 частоти вих двигунів 7, 8 надходять до входів блоку 27 обертання тягового двигуна 7. Як тільки вони стауправління, котрий двома виходами підключений нуть менше від сигналу з виходу блока 39 завдандо других (керуючих) входів блоків 23, 24 формуня зміни швидкості ковзання і інтегратора 15, тобвання управляючих імпульсів. При зниженні струто коли asm
ДивитисяДодаткова інформація
Назва патенту англійськоюAsynchronous electric drive of diesel locomotive
Назва патенту російськоюАсинхронный электропривод тепловоза
МПК / Мітки
МПК: B60L 11/02
Мітки: асинхронний, тепловоза, електропривід
Код посилання
<a href="https://ua.patents.su/6-12436-asinkhronnijj-elektroprivid-teplovoza.html" target="_blank" rel="follow" title="База патентів України">Асинхронний електропривід тепловоза</a>
Електропривід тепловоза

Номер патенту: 11291
Опубліковано: 15.12.2005
Автор: Шапран Євген Миколайович
МПК: B60L 11/02
Мітки: тепловоза, електропривід
Формула / Реферат:
Електропривід тепловоза, що містить сполучений з дизельним двигуном тяговий генератор, що живить тяговий електродвигун з обмоткою збудження, паралельно якій підключений регулятор струму збудження тягового електродвигуна, вхід якого підключений до першого виходу формувача управляючих сигналів, входи якого підключені до першого погоджувального блока, датчик струму збудження тягового електродвигуна, датчик струму тягового генератора і задатчик...
Електропривід тепловоза

Номер патенту: 5139
Опубліковано: 15.02.2005
Автори: Смородін Андрій Юрійович, Шапран Євген Миколайович
МПК: B60L 11/02
Мітки: тепловоза, електропривід
Формула / Реферат:
Електропривід тепловоза, що містить сполучений з дизельним двигуном тяговий генератор, що живить електродвигун з обмоткою збудження, паралельно якій підключений регулятор струму збудження тягового електродвигуна, вхід якого підключений до першого виходу формувача управляючих сигналів, входи якого підключені до першого погоджувального блока, датчика струму збудження тягового електродвигуна, датчика струму тягового генератора і задатчика...
Асинхронний електропривід з синхронним обертанням роторів
Номер патенту: 44951
Опубліковано: 15.03.2002
Автори: Калюжний Володимир Владиславович, Ісаков Володимир Миколайович, Калюжний Сергій Володимирович, Волков Ігор Володимирович, Шевченко Іван Степанович
МПК: H02P 5/74
Мітки: обертанням, електропривід, асинхронний, роторів, сінхронним
Формула / Реферат:
Асинхронний електропривід з синхронним обертанням роторів, до складу якого входять асинхронні двигуни, що статорними обмотками підімкнені до живильної мережі, який відрізняється тим, що фазні обмотки роторів з'єднані з входами змінного струму відповідних мостових випрямлячів, виходи постійного струму яких з'єднані між собою відповідно паралельно та відповідно послідовно з мостовим випрямлячем параметричного джерела струму, підімкненого своїми...
Асинхронний електропривід
Номер патенту: 35712
Опубліковано: 16.04.2001
Автори: Потапов Володимир Дмитрович, Шевченко Іван Степанович, Самчелєєв Юрій Павлович, Дикович Юрій Анатолійович
МПК: H02K 17/00
Мітки: асинхронний, електропривід
Формула / Реферат:
Асинхронний електропривід, до складу якого входить електродвигун з фазним ротором, який відрізняється тим, що в коло ротора ввімкнено трифазний трансформатор зі змінним коефіцієнтом трансформації, первинна обмотка якого через щітки та кільця, з'єднана з обмоткою ротора, а в коло вторинної обмотки ввімкнені конденсатори.
Спосіб керування асинхронним двигуном та електропривід, що його реалізує
Номер патенту: 31656
Опубліковано: 15.12.2000
Автор: Михайлюта Сергій Леонтійович
МПК: H02P 27/04, H02P 7/00
Мітки: керування, реалізує, спосіб, асинхронним, двигуном, електропривід
Текст:
...для забезпечення мінімального стру , статора, реактивна складова струну статора нае підтримуватись пропорційн активній складовій. На фіг Л зображена крива зміни моменту асинхронного двигуна 4A100L4 одержана в результаті моделювання, при зміні співвідношення складових стрn чиї запропонований спосіб керування асинхронним двнгуном дозволяє забезпечнт високі динамічні властивості електроприводу та мінімальне споживання струм від...
Попередній патент: Процес отримання високотемпературного коксохімічного теплоносія із кам’яновугільної смоли
Наступний патент: Водопропускна споруда під дорожнім насипом на деформівній основі
Випадковий патент: Спосіб дезінсекції за використання інсектицидних принад