Пристрій для автоматичного вимірювання маси вантажу на кар’єрних автосамоскидах
Номер патенту: 30873
Опубліковано: 15.12.2000
Автори: Бизов Богдан Володимирович, Горіх Володимир Васильович, Безлуцький Юрій Борисович, Філатов Сергій Валентинович

Текст
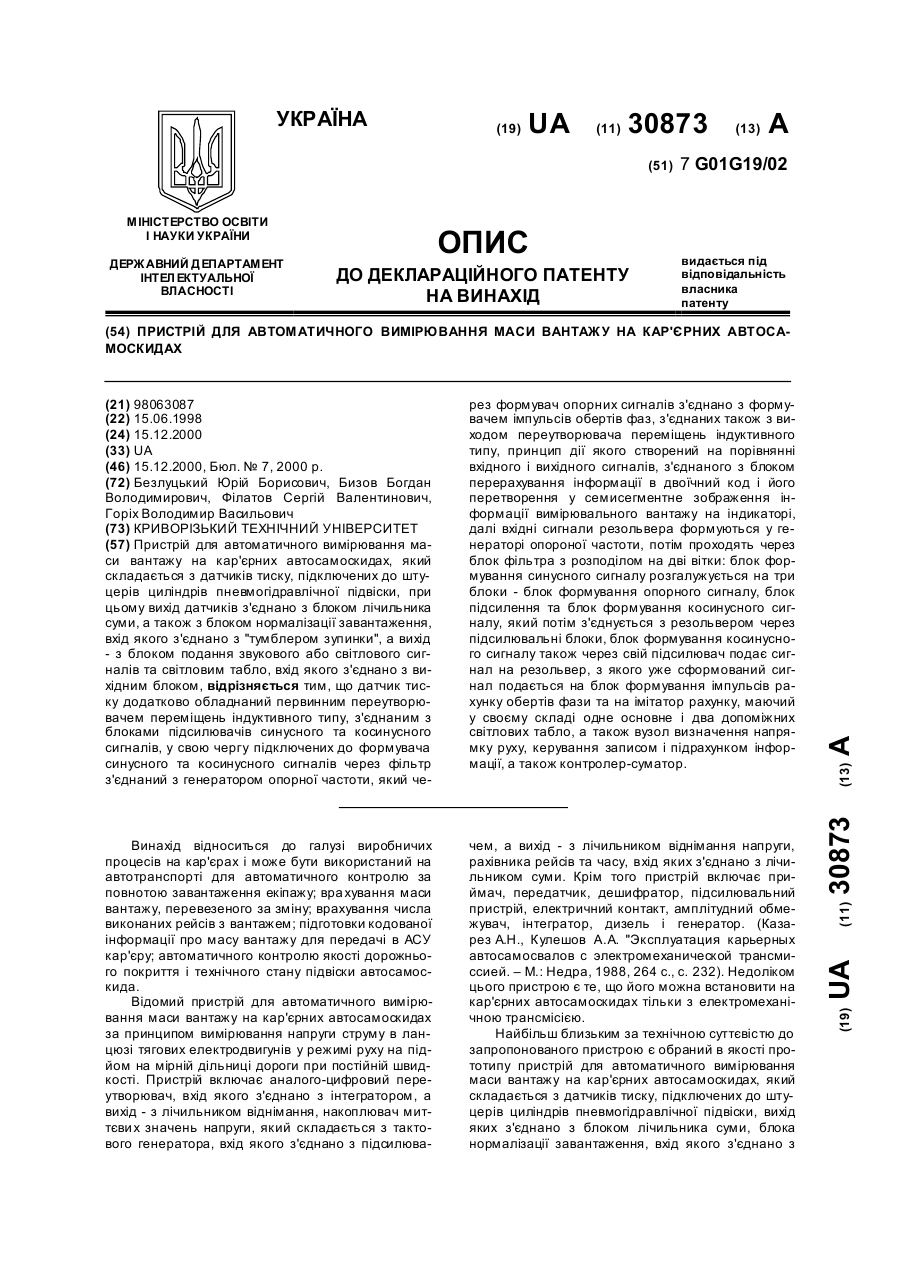
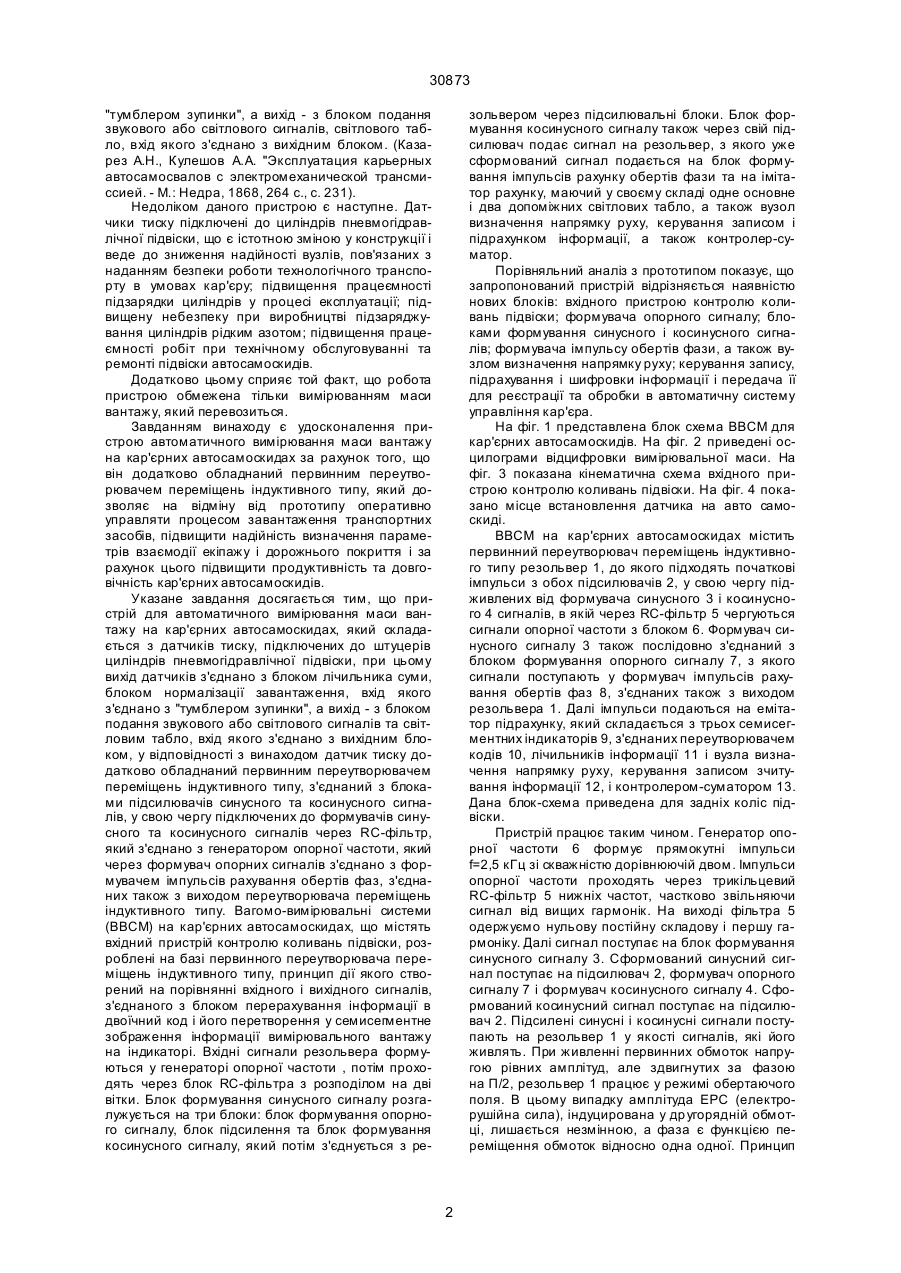
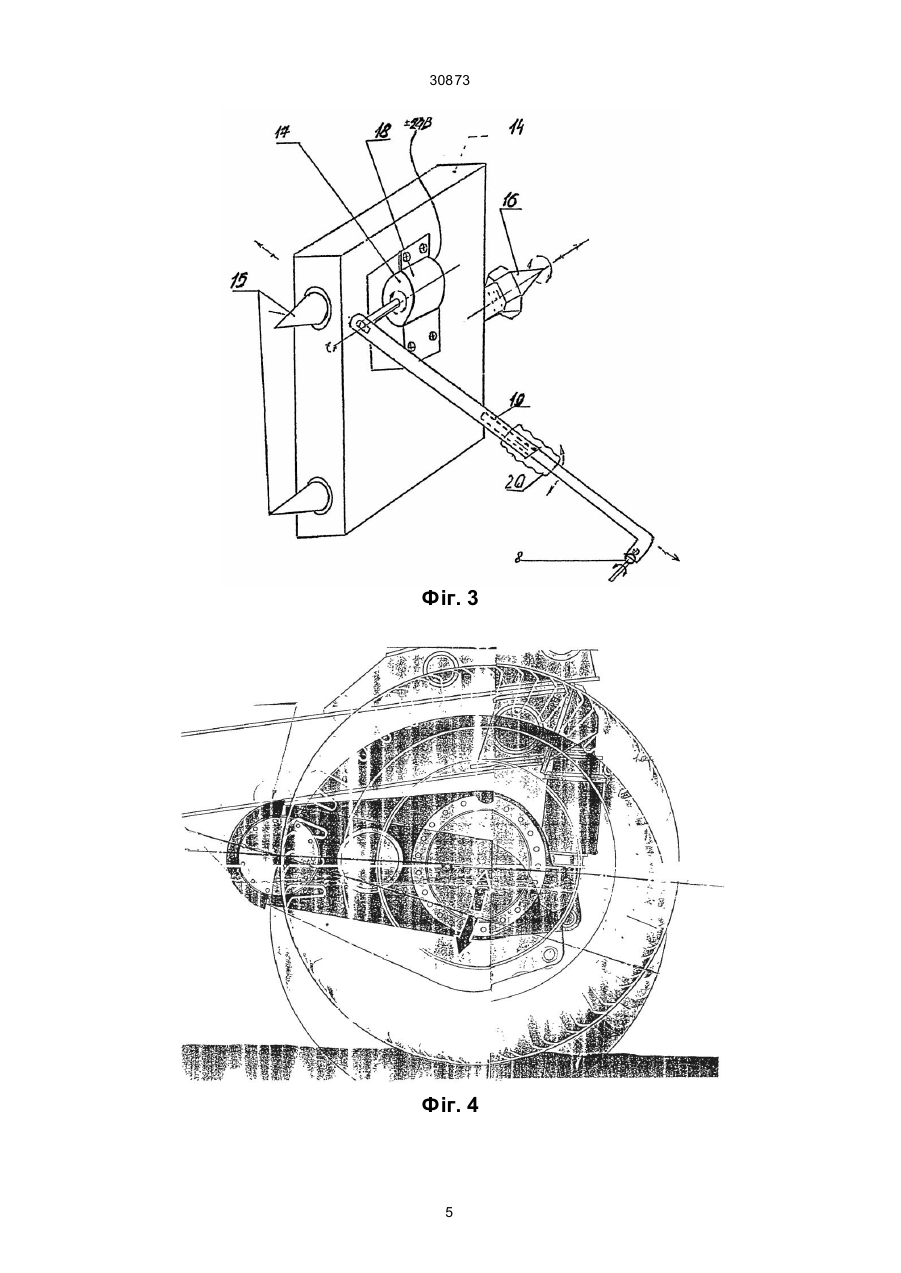
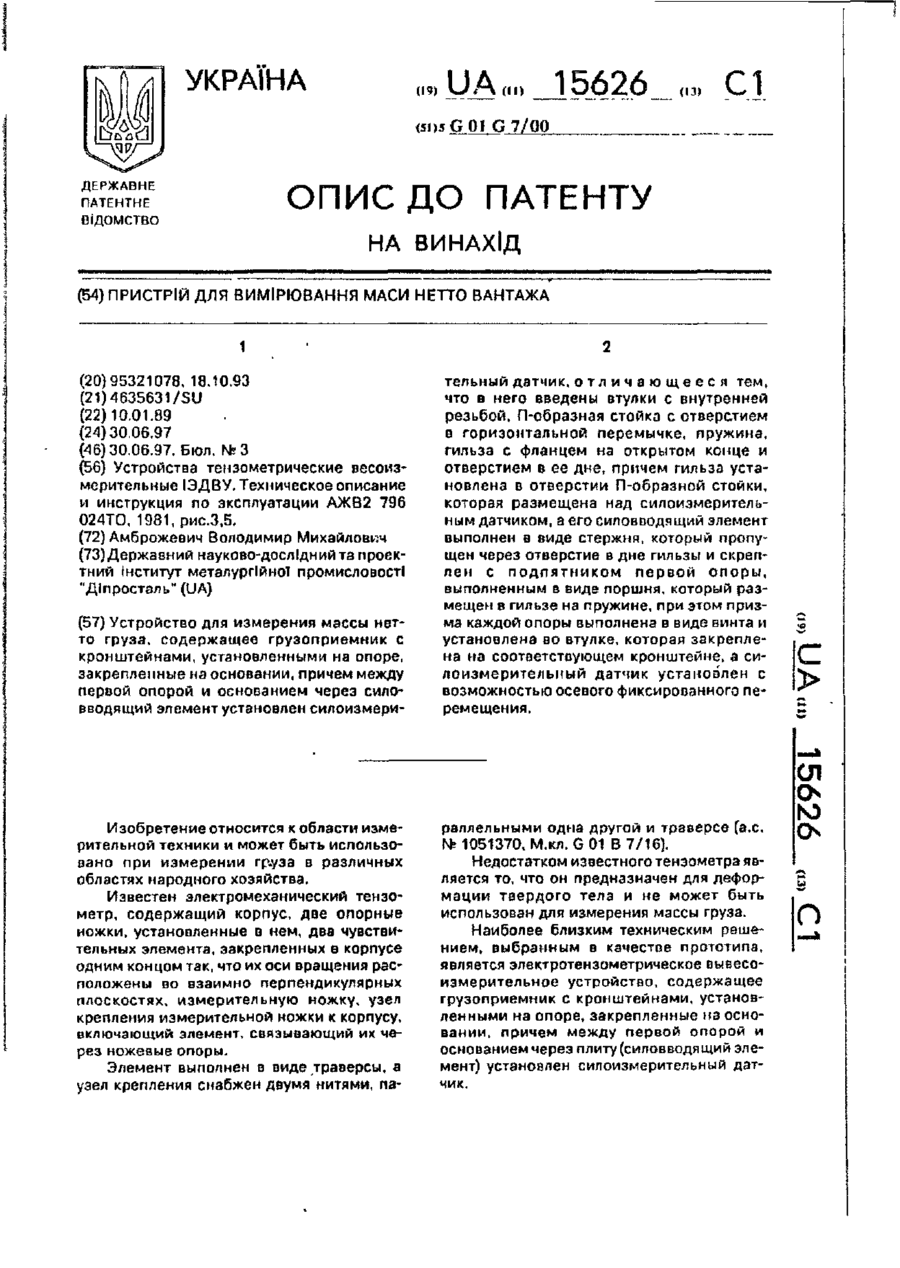
Пристрій для автоматичного вимірювання маси вантажу на кар'єрних автосамоскидах, який складається з датчиків тиску, підключених до штуцерів циліндрів пневмогідравлічної підвіски, при цьому вихід датчиків з'єднано з блоком лічильника суми, а також з блоком нормалізації завантаження, вхід якого з'єднано з "тумблером зупинки", а вихід - з блоком подання звукового або світлового сигналів та світловим табло, вхід якого з'єднано з вихідним блоком, відрізняється тим, що датчик тиску додатково обладнаний первинним переутворювачем переміщень індуктивного типу, з'єднаним з блоками підсилювачів синусного та косинусного сигналів, у свою чергу підключених до формувача синусного та косинусного сигналів через фільтр з'єднаний з генератором опорної частоти, який че A (54) ПРИСТРІЙ ДЛЯ АВТОМАТИЧНОГО ВИМІРЮВАННЯ МАСИ ВАНТАЖУ НА КАР'ЄРНИХ АВТОСАМОСКИДАХ 30873 "тумблером зупинки", а вихід - з блоком подання звукового або світлового сигналів, світлового табло, вхід якого з'єднано з вихідним блоком. (Казарез А.Н., Кулешов А.А. "Эксплуатация карьерных автосамосвалов с электромеханической трансмиссией. - М.: Недра, 1868, 264 с., с. 231). Недоліком даного пристрою є наступне. Датчики тиску підключені до циліндрів пневмогідравлічної підвіски, що є істотною зміною у конструкції і веде до зниження надійності вузлів, пов'язаних з наданням безпеки роботи технологічного транспорту в умовах кар'єру; підвищення працеємності підзарядки циліндрів у процесі експлуатації; підвищену небезпеку при виробництві підзаряджування циліндрів рідким азотом; підвищення працеємності робіт при технічному обслуговуванні та ремонті підвіски автосамоскидів. Додатково цьому сприяє той факт, що робота пристрою обмежена тільки вимірюванням маси вантажу, який перевозиться. Завданням винаходу є удосконалення пристрою автоматичного вимірювання маси вантажу на кар'єрних автосамоскидах за рахунок того, що він додатково обладнаний первинним переутворювачем переміщень індуктивного типу, який дозволяє на відміну від прототипу оперативно управляти процесом завантаження транспортних засобів, підвищити надійність визначення параметрів взаємодії екіпажу і дорожнього покриття і за рахунок цього підвищити продуктивність та довговічність кар'єрних автосамоскидів. Указане завдання досягається тим, що пристрій для автоматичного вимірювання маси вантажу на кар'єрних автосамоскидах, який складається з датчиків тиску, підключених до штуцерів циліндрів пневмогідравлічної підвіски, при цьому вихід датчиків з'єднано з блоком лічильника суми, блоком нормалізації завантаження, вхід якого з'єднано з "тумблером зупинки", а вихід - з блоком подання звукового або світлового сигналів та світловим табло, вхід якого з'єднано з вихідним блоком, у відповідності з винаходом датчик тиску додатково обладнаний первинним переутворювачем переміщень індуктивного типу, з'єднаний з блоками підсилювачів синусного та косинусного сигналів, у свою чергу підключених до формувачів синусного та косинусного сигналів через RC-фільтр, який з'єднано з генератором опорної частоти, який через формувач опорних сигналів з'єднано з формувачем імпульсів рахування обертів фаз, з'єднаних також з виходом переутворювача переміщень індуктивного типу. Вагомо-вимірювальні системи (ВВСМ) на кар'єрних автосамоскидах, що містять вхідний пристрій контролю коливань підвіски, розроблені на базі первинного переутворювача переміщень індуктивного типу, принцип дії якого створений на порівнянні вхідного і вихідного сигналів, з'єднаного з блоком перерахування інформації в двоїчний код і його перетворення у семисегментне зображення інформації вимірювального вантажу на індикаторі. Вхідні сигнали резольвера формуються у генераторі опорної частоти , потім проходять через блок RC-фільтра з розподілом на дві вітки. Блок формування синусного сигналу розгалужується на три блоки: блок формування опорного сигналу, блок підсилення та блок формування косинусного сигналу, який потім з'єднується з ре зольвером через підсилювальні блоки. Блок формування косинусного сигналу також через свій підсилювач подає сигнал на резольвер, з якого уже сформований сигнал подається на блок формування імпульсів рахунку обертів фази та на імітатор рахунку, маючий у своєму складі одне основне і два допоміжних світлових табло, а також вузол визначення напрямку руху, керування записом і підрахунком інформації, а також контролер-суматор. Порівняльний аналіз з прототипом показує, що запропонований пристрій відрізняється наявністю нових блоків: вхідного пристрою контролю коливань підвіски; формувача опорного сигналу; блоками формування синусного і косинусного сигналів; формувача імпульсу обертів фази, а також вузлом визначення напрямку руху; керування запису, підрахування і шифровки інформації і передача її для реєстрації та обробки в автоматичну систему управління кар'єра. На фіг. 1 представлена блок схема ВВСМ для кар'єрних автосамоскидів. На фіг. 2 приведені осцилограми відцифровки вимірювальної маси. На фіг. 3 показана кінематична схема вхідного пристрою контролю коливань підвіски. На фіг. 4 показано місце встановлення датчика на авто самоскиді. ВВСМ на кар'єрних автосамоскидах містить первинний переутворювач переміщень індуктивного типу резольвер 1, до якого підходять початкові імпульси з обох підсилювачів 2, у свою чергу підживлених від формувача синусного 3 і косинусного 4 сигналів, в якій через RC-фільтр 5 чергуються сигнали опорної частоти з блоком 6. Формувач синусного сигналу 3 також послідовно з'єднаний з блоком формування опорного сигналу 7, з якого сигнали поступають у формувач імпульсів рахування обертів фаз 8, з'єднаних також з виходом резольвера 1. Далі імпульси подаються на емітатор підрахунку, який складається з трьох семисегментних індикаторів 9, з'єднаних переутворювачем кодів 10, лічильників інформації 11 і вузла визначення напрямку руху, керування записом зчитування інформації 12, і контролером-суматором 13. Дана блок-схема приведена для задніх коліс підвіски. Пристрій працює таким чином. Генератор опорної частоти 6 формує прямокутні імпульси f=2,5 кГц зі скважністю дорівнюючій двом. Імпульси опорної частоти проходять через трикільцевий RC-фільтр 5 нижніх частот, частково звільняючи сигнал від вищих гармонік. На виході фільтра 5 одержуємо нульову постійну складову і першу гармоніку. Далі сигнал поступає на блок формування синусного сигналу 3. Сформований синусний сигнал поступає на підсилювач 2, формувач опорного сигналу 7 і формувач косинусного сигналу 4. Сформований косинусний сигнал поступає на підсилювач 2. Підсилені синусні і косинусні сигнали поступають на резольвер 1 у якості сигналів, які його живлять. При живленні первинних обмоток напругою рівних амплітуд, але здвигнутих за фазою на П/2, резольвер 1 працює у режимі обертаючого поля. В цьому випадку амплітуда ЕРС (електрорушійна сила), індуцирована у др угорядній обмотці, лишається незмінною, а фаза є функцією переміщення обмоток відносно одна одної. Принцип 2 30873 вимірювання оснований на поданні у цифровому виді різниці фаз між живленим і вимірювальним сигналами резольвера 1. Число розрядів визначається апаратною реалізацією. У даному випадку обрано три-чотири десятичних розряда. Фізичний принцип відцифровки різниці фаз у діапазоні від 0 до 360 електричних градусів пояснюється на фіг. 2. Формувач імпульсів рахування обертів фази 8 виробляє вузькі прямокутні імпульси, прив’язані по фазі до синусоїдального вимірювального сигналу тієї ж частоти. На вході схеми для забезпечення перешкодозахищеності поставлені два полосових фільтра 5, виконані на операційних підсилювачах. На наступному етапі переутворення вимірювального сигналу відбувається синхронізація імпульсів вимірювального сигналу по частоті наповнення. Вузол визначення напрямку руху ротора датчика 12 виявляє напрямок і подає імпульси рахунку на підсумковий або віднімальний входи лічильника 11. Потім одержаний двоїчнодесятичний код лічильника перетворюється в семисегментний код 10 для відображення на індикаторах 9. Опис представлено для одного датчика, другий повністю аналогічний першому. Для визначення середнього навантаження на два колеса одержана інформація з кожного датчика підсумовується і ділиться на 2, тобто одержуємо середнє арифметичне. Таким чином передбачено два 3-розрядних і одне 4-розрядне табло. Це дозволяє визначити не тільки середнє навантаження, а також спостерігати за навантаженням на кожне колесо при зміні нахилу дорожнього полотна під час руху. Експериментальне дослідження запропонованої ВВСМ на кар'єрних автосамоскидах показало, що у порівнянні з пристроєм аналогічного типу (прототипом) запропонований пристрій забезпечує: більш надійне вимірювання маси вантажу; оперативний контроль якості дорожнього покриття та технічного стану підвіски і дозволяє за рахунок цього підвищити продуктивність і довговічність автосамоскидів. Відомості, які підтверджують можливість здійснення винаходу. Пристрій для автоматичного вимірювання маси вантажу на кар'єрних автосамоскидах дає можливість слідкувати за навантаженням автосамоскида і надавати попередній та заключний сигнали машиністу екскаватора про кінець завантаження. Шляхом установлення на підвіску автосамоскида телескопічного важеля з датчиком, який буде слідкувати за зміною кута просадки підвіски автосамоскида, ми й можемо керувати величиною завантаження автосамоскида та закінчувати його, щоб уникнути перевантаження. З початком завантаження автосамоскида водій у кабіні за допомогою світлового табло слідкує за об'ємом його завантаженням, потім коли лишається до повного завантаження ще 20 тонн, прилад дає попередній звуковий і світловий сигнали, що лишилося ще завантажити один чи два ковші екскаватора (в залежності від марки екскаватора) до закінчення завантаження. Коли вантаж у кузові автосамоскида дорівнює його вантажопідйомності подаються два заключні звукові сигнали екскаваторнику про закінчення завантаження. Об'єм завантаження залежить від ковша екскаватора та марки автосамоскида. Даний пристрій може використовуватись на автосамоскидах заключної серії БєлАЗ- 7549, 7519, 7521, 7512, 7513, 7514, 75428, 7530, з деякими змінами місць кріплення та у самоскидах іноземного виробництва типу KOMATSU-НD-1200 (Японія) та КАТ (США). Похибка завантаження задовольняє мінімально допустиме перевантаження щодо коліс автосамоскида за технічними умовами. 3 30873 Фіг. 1 Фіг. 2 4 30873 Фіг. 3 Фіг. 4 5 30873 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ __________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 __________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automated measurement of load mass on pit dump trucks
Автори англійськоюBezlutskyi Yurii Borysovych, Byzov Bohdan Volodymyrovych, Filatov Serhii Valentynovych, Horikh Volodymyr Vasyliovych
Назва патенту російськоюУстройство для автоматического измерения массы груза на карьерных автосамосвалах
Автори російськоюБезлуцкий Юрий Борисович, Бызов Богдан Владимирович, Филатов Сергей Валентинович, Горих Владимир Васильевич
МПК / Мітки
МПК: G01G 19/02
Мітки: пристрій, автосамоскидах, автоматичного, маси, кар'єрних, вимірювання, вантажу
Код посилання
<a href="https://ua.patents.su/6-30873-pristrijj-dlya-avtomatichnogo-vimiryuvannya-masi-vantazhu-na-karehrnikh-avtosamoskidakh.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичного вимірювання маси вантажу на кар’єрних автосамоскидах</a>
Пристрій для вимірювання маси нетто вантажа
Номер патенту: 15626
Опубліковано: 30.06.1997
Автор: Амброжевич Володимир Михайлович
МПК: G01G 7/00
Мітки: маси, пристрій, вантажа, нетто, вимірювання
Текст:
...1,2) осуществляется регулировка расстояния Н (фиг.і)для установки грузоподъемника 1 о горизон- 15 тальное положение. Силоизмерительиый датчик 8 установлен на опорном фланце 9 между первой опорой 3 и основанием 4 через силовводящий элемент 10 с возможностью осевого 20 фиксированного перемещения (поз.8,9,10 на фиг.1}. Опорный фланец фиксируется винтом 11 (фиг.1). Втулка 7 зафиксирована гайкой 12 25 (фиг.2). Силовводящий элемент 10 выполнен в...
Пристрій для автоматичного вимірювання смуги пропускання чотириполюсника
Номер патенту: 4061
Опубліковано: 27.12.1994
Автори: Завражин Валерій Іванович, Коровін Ремір Володимирович, Носов Віталій Вікторович
МПК: G01R 27/22, G01R 29/00
Мітки: смуги, пристрій, пропускання, вимірювання, чотириполюсника, автоматичного
Формула / Реферат:
1. Устройство для автоматического измерения полосы пропускания четырехполюсника, содержащее генератор качающейся частоты, к выходу которого подключен вход исследуемого четырехполюсника, а также последовательно соединенные детектор, пороговый формирователь импульсов и логический блок, отличающееся тем, что в него введены два колебательных контура, входами подключенные к выходу генератора качающейся частоты, а выходами через сумматор, третьим...
Пристрій для автоматичного контролю внутрімлинного заповнення кульових млинів
Номер патенту: 31746
Опубліковано: 15.12.2000
Автори: Пермяков В'ячеслав Іванович, Гуд Михайло Борисович, Кушнір Олексій Михайлович
МПК: B02C 25/00
Мітки: кульових, млинів, пристрій, автоматичного, заповнення, внутрімлинного, контролю
Формула / Реферат:
Пристрій для автоматичного контролю внутрішньомлинного заповнення кульових млинів, що містить датчики коливання корпусу млина з відповідними перетворювачами, комутуючий блок та блок обробки результатів вимірювання, який відрізняється тим, що він додатково має блок частотного аналізу сигналу коливань корпусу млина, у якого є один вхід, котрий з'єднано з виходом блока обробки результатів вимірювання, та два виходи, один з яких з'єднаний з...
Залізничні ваги для поосного вимірювання маси рухомих вагонів
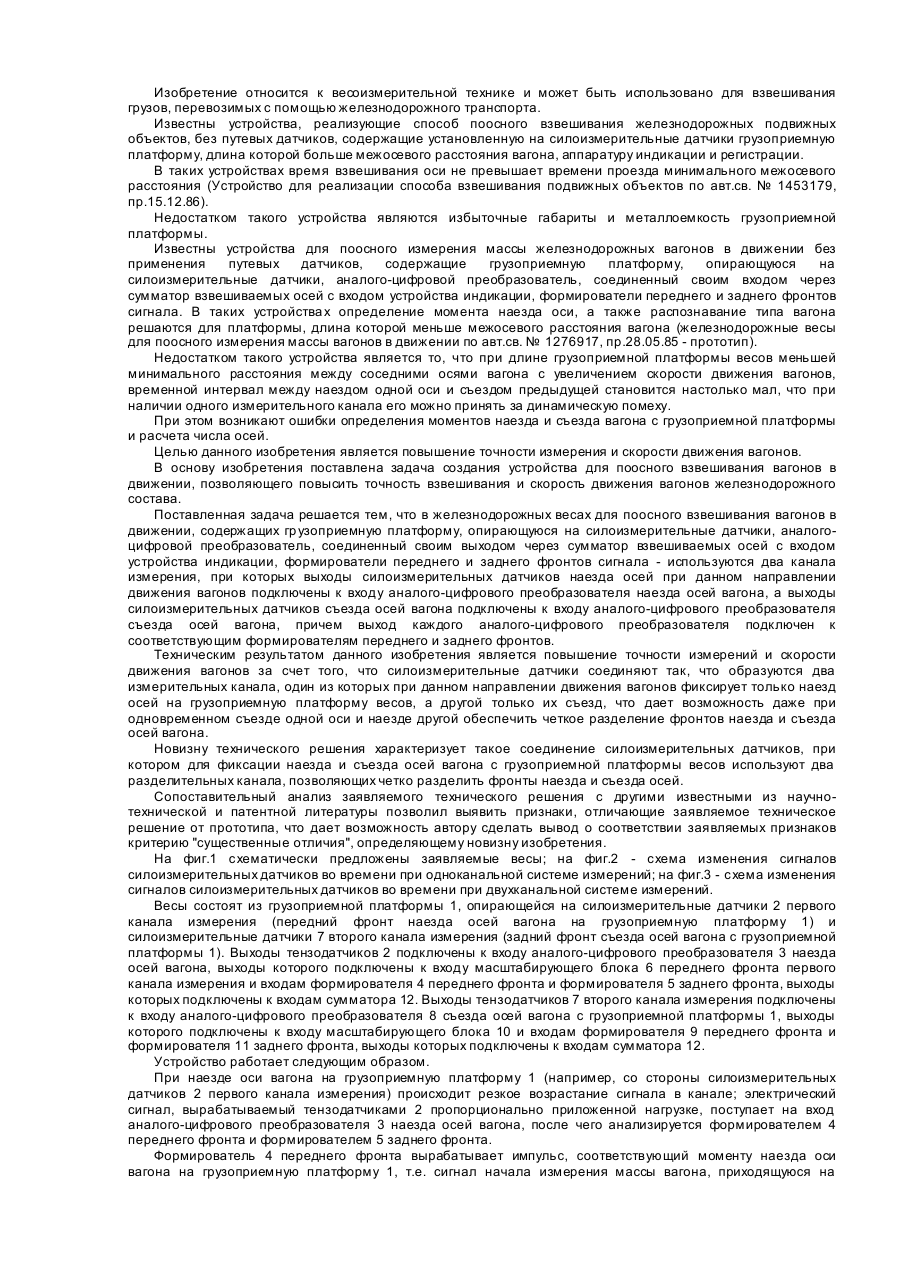
Номер патенту: 17601
Опубліковано: 06.05.1997
Автор: Дашевський Яків Тевелович
МПК: G01G 19/04
Мітки: ваги, рухомих, залізничні, маси, поосного, вагонів, вимірювання
Формула / Реферат:
Железнодорожные весы для поосного измерения массы вагонов в движении, содержащие грузоприемную платформу, опирающуюся на силоизмерительные датчики, аналого-цифровой преобразователь, соединенный своим выходом через сумматор взвешиваемых осей с входом устройства индикации, формирователи переднего и заднего фронтов сигнала, отличающиеся тем, что выходы силоизмерительных датчиков наезда осе ι, при данном направлении движения вагонов,...
Пристрій контролю маси конвертера
Номер патенту: 13039
Опубліковано: 28.02.1997
Автори: Гуща Костянтин Володимирович, Сорокін Валерій Васильович, Соболєв Сергій Кузьмич, Ясинський Віктор Олександрович, Сорокін Микола Олександрович, Степанченко Микола Дмитрійович, Іванов Євген Анатолійович, Богушевський Володимир Святославович, Церковницький Микола Сергійович
МПК: C21C 5/30
Мітки: конвертера, маси, контролю, пристрій
Формула / Реферат:
1. Устройство контроля массы конвертера, содержащее регистратор массы, подсоединенный к чувствительному элементу, установленному на опорной конструкции конвертера и закрепленному между двумя основаниями, причем одно из оснований выполнено с возможностью регулируемого перемещения, отличающееся тем, что подвижное основание чувствительного элемента соединено с приводом, корпус которого через зубчатую передачу соединен с колонной, а сам привод...
Попередній патент: Листоправильна машина
Наступний патент: Спосіб профілактики полігіпомікроелементозу
Випадковий патент: Спосіб одержання сорбенту для очистки стічних вод