Пристрій для пересування контейнерів та/або контейнерних платформ
Номер патенту: 36212
Опубліковано: 10.10.2008
Автори: Жабєєв Павло Володимирович, Жабєєв Володимир Павлович, Жабєєв Георгій Володимирович
Формула / Реферат
1. Пристрій для пересування контейнерів та/або контейнерних платформ, що містить автономні базові структури, оснащені колесами, причому на кожній автономній базовій структурі розміщені поперечні балки з вузлом вертикально-горизонтального переміщення контейнерів, а кожна автономна базова структура оснащена індивідуальною системою керування сортувально-перевалочними операціями з піднімання та/або пересування контейнерів, який відрізняється тим, що автономні базові структури виконані у вигляді пролітних козлових кранів, при цьому один торець кожної поперечної балки пролітного козлового крану додатково оснащений елементами, які при з'єднуванні утворюють вузол зчленування згаданих балок.
2. Пристрій для пересування контейнерів та/або контейнерних платформ за п. 1, який відрізняється тим, що поперечна балка кожної автономної базової структури має захисну діелектричну накладку.
3. Пристрій для пересування контейнерів та/або контейнерних платформ за п. 1, який відрізняється тим, що поперечна балка кожного козлового пролітного крану є пересувною.
4. Пристрій для пересування контейнерів та/або контейнерних платформ за п. 1, який відрізняється тим, що пролітні козлові крани розташовані на протилежних вантажних перонах, кожний з яких оснащений напрямними для повздовжнього переміщення відповідних пролітних козлових кранів.
5. Пристрій для пересування контейнерів та/або контейнерних платформ за п. 1, який відрізняється тим, що між вантажними перонами розташовані сортувальні колії.
6. Пристрій для пересування контейнерів та/або контейнерних платформ за п. 1, який відрізняється тим, що вантажні перони обладнані пандусами і оснащені автотранспортними порталами.
Текст
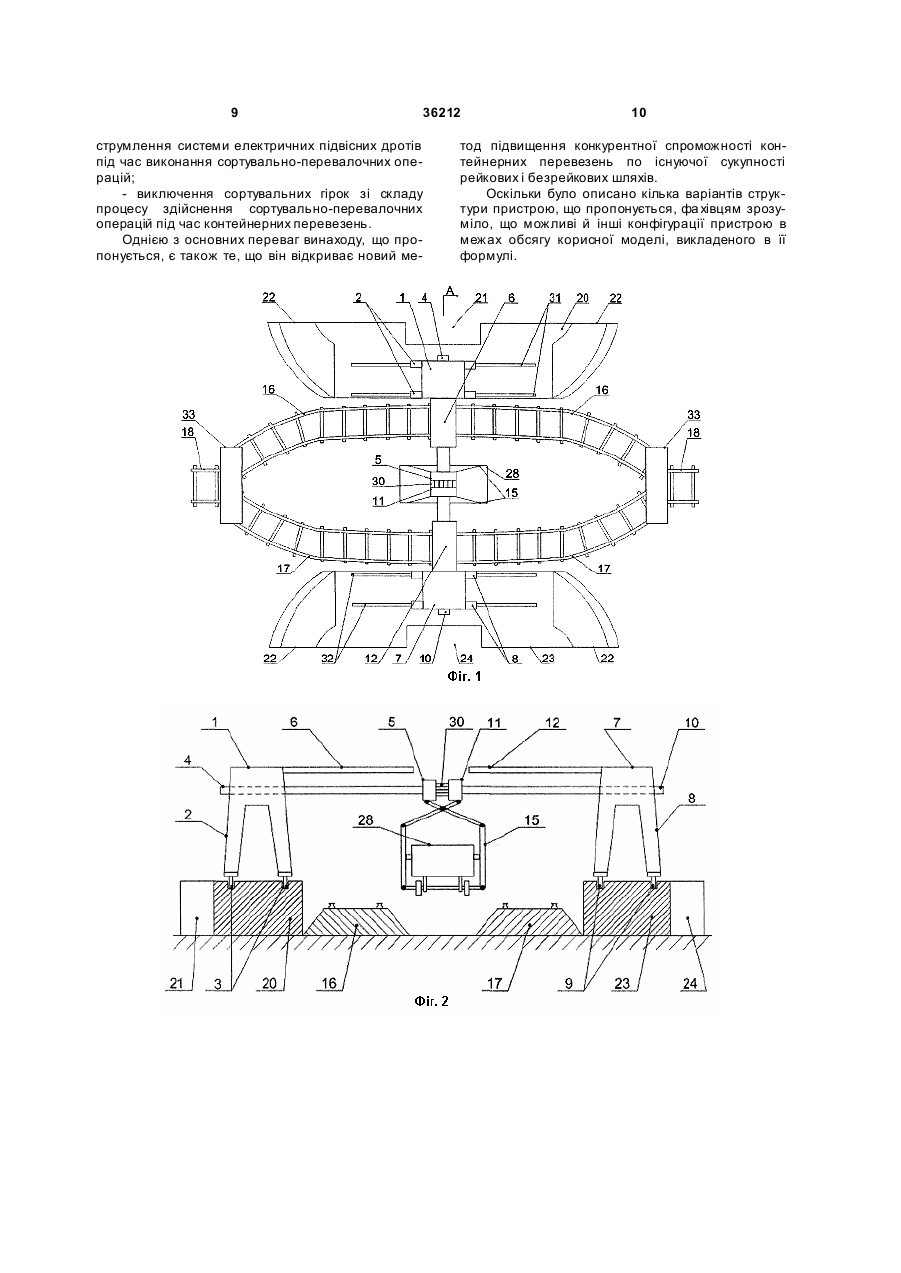
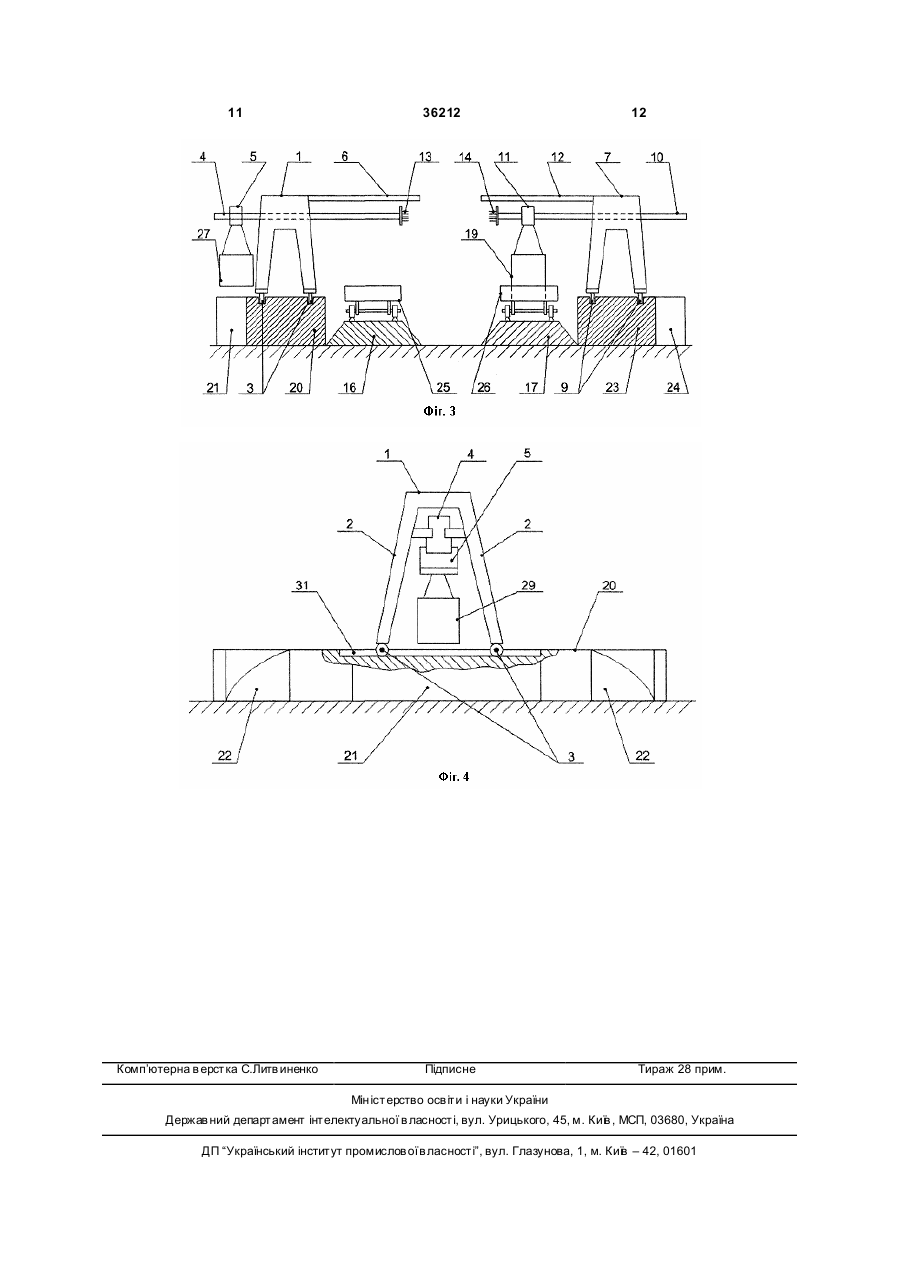
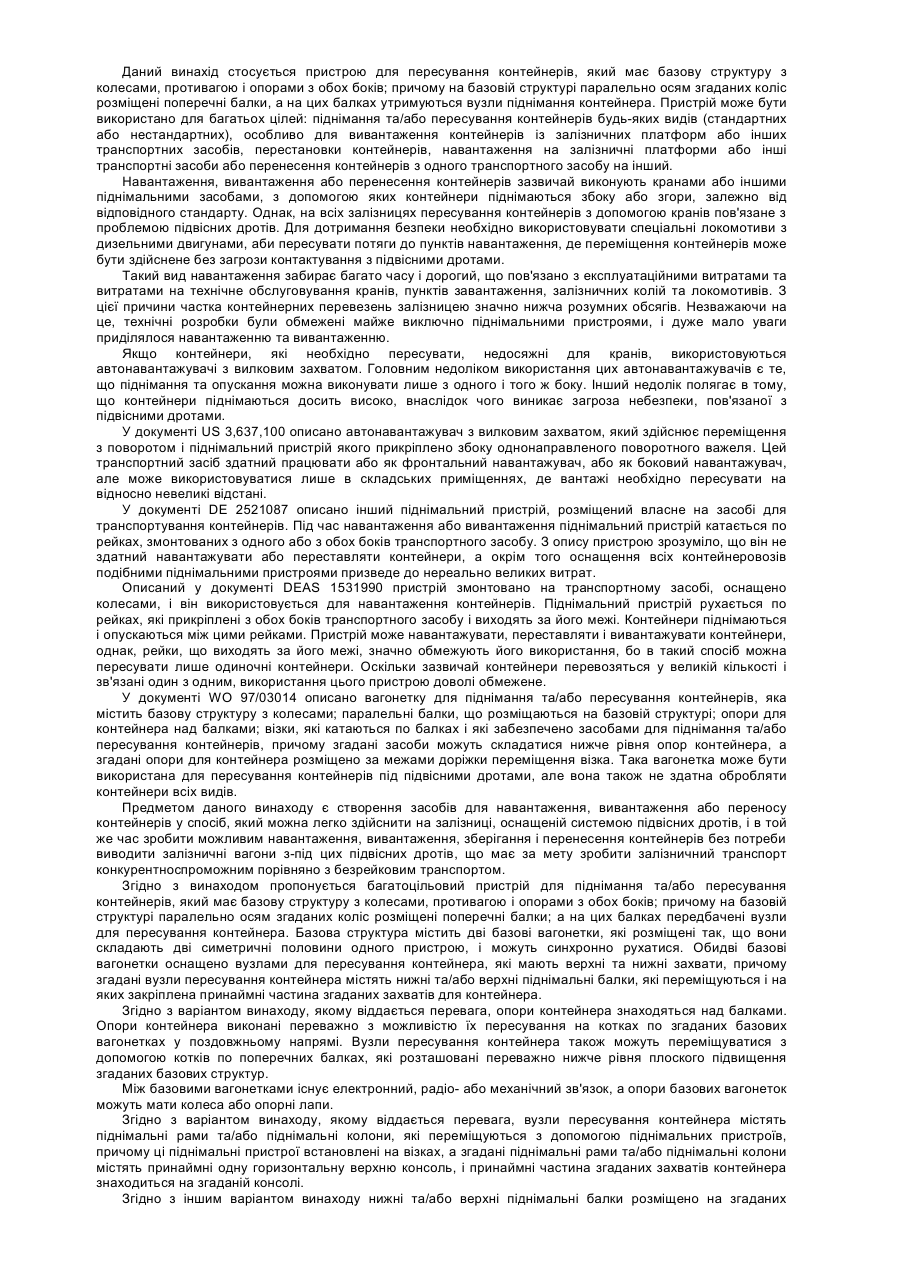
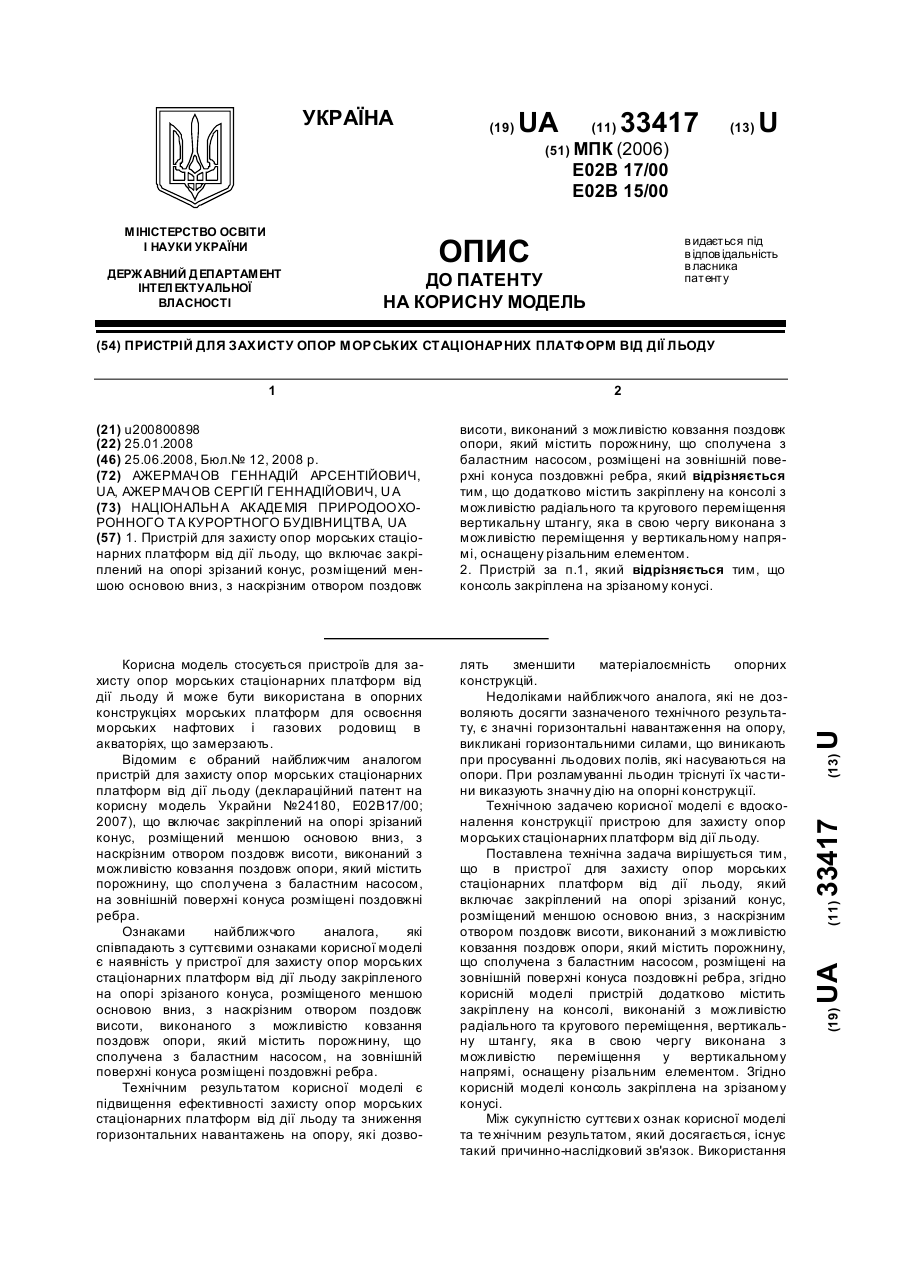
1. Пристрій для пересування контейнерів та/або контейнерних платформ, що містить автономні базові структури, оснащені колесами, причому на кожній автономній базовій структурі розміщені поперечні балки з вузлом вертикальногоризонтального переміщення контейнерів, а кожна автономна базова структура оснащена індивідуальною системою керування сортувальноперевалочними операціями з піднімання та/або пересування контейнерів, який відрізняється тим, що автономні базові структури виконані у вигляді пролітних козлових кранів, при цьому один торець кожної поперечної балки пролітного козлового крану додатково оснащений елементами, які при з'єднуванні утворюють вузол зчленування згаданих балок. U 2 (19) 1 3 36212 нижні та/або верхні підіймальні балки, які переміщуються і на яких закріплено принаймні частину згаданих захватів; а опори контейнера можуть пересуватися на котках по згаданих базових вагонетках у повздовжньому напрямі; причому між базовими вагонетками існує механічний, електронний, радіо- або інший зв'язок. Недоліками обраного за прототип рішення є: - неможливість пересування контейнерних платформ та/або вилучення зі складу потягу/маршруту контейнерних платформи, які щойно звільнилися і не є останніми у послідовності транспортних засобів потягу/маршруту, що знаходиться на сортувальної колії; - низька пропускна спроможність системи залізничних колій, що задіяні в процесах піднімання та перенесення контейнерів, тому що для руху базової стр уктури, яка містить дві вагонетки, необхідна окрема сортувальна колія; - обмеженість робочої зони і функціональних можливостей сортувально-перевалочного контейнерного терміналу, тому що базова структура пристрою, яка містить дві вагонетки, при виконанні операцій з пересування контейнерів може рухатись тільки паралельно транспортним одиницям потягу/маршруту, що знаходиться на сортувальній колії. Задачею корисної моделі є створення пристрою для пересування контейнерів та/або контейнерних платформ, за допомогою якого здійснюється пересування контейнерів та/або контейнерних платформ більш ефективно із забезпеченням можливості мінімізації часу та/або вартості виконання сортувально-перевалочних операцій, та/або оптимізації сукупності параметрів “час-вартість” виконання сортувальноперевалочних операцій на поточному і як мінімум на наступному сортувально-перевалочному контейнерному терміналі. При забезпеченні можливості підвищення безпеки при виконанні сортувально-перевалочних операцій у пункта х перетину рейкових та/або рейкових і безрейкових маршрутів, оснащених системою електричних підвісних дротів. Зменшити загрозу електричного контактування елементів пристрою, що пропонується, із системою електричних підвісних дротів. Уникнути витрат часу на обов'язкове знеструмлення системи електричних підвісних дротів під час пересування під нею контейнерів та/або контейнерних платформ. Поставлена задача вирішується пристроєм для пересування контейнерів та/або контейнерних платформ, що пропонується, наступним чином. Пристрій для пересування контейнерів та/або контейнерних платформ містить автономні базові структури, оснащені колесами, причому на кожній автономній базовій структурі розміщені поперечні балки з вузлом вертикально-горизонтального переміщення контейнерів, а кожна автономна базова структура оснащена індивідуальною системою керування сортувально-перевалочними операціями з піднімання та/або пересування контейнерів; автономні базові структури виконані у вигляді пролітних козлових кранів, при цьому один торець кожної поперечної балки пролітного козлового 4 крану додатково оснащений елементом з'єднування, які при з'єднуванні утворюють вузол зчленування згаданих балок. Поперечна балка кожної автономної базової структури є пересувною та має захисну діелектричну накладку. Пролітні козлові крани розташовані на протилежних вантажних перонах, кожний з яких оснащений напрямними для повздовжнього переміщення відповідних пролітних козлових кранів. Між вантажними перонами, що обладнані пандусами і оснащені автотранспортними порталами, розташовані сортувальні колії. Технічний результат, який досягається при використанні корисної моделі, що пропонується, полягає у створенні конкурентноспроможного сортувально-перевалочного контейнерного термінала для пересування контейнерів та/або контейнерних платформ, причому складові пристрою, що пропонується, одночасно забезпечують ефективну і безпечну роботу пролітних козлових кранів під системою електричних підвісних дротів без загрози електричного контактування складових пристрою із системою електричних підвісних дротів та витрат часу на обов'язкове знеструмлення системи електричних підвісних дротів під час пересування під нею контейнерів та/або контейнерних платформ за допомогою пристрою, що пропонується. Корисна модель пояснюється фігурами: Фіг.1 - пристрій для пересування контейнерів та/або контейнерних платформ в режимі “Пересування контейнерної платформи між сортувальними коліями зчленованими автономними базовими структурами” (вид зверху). Система електричних підвісних дротів на цієї та інших фігура х не наведена; Фіг.2 - пристрій для пересування контейнерів та/або контейнерних платформ в режимі “Пересування контейнерної платформи між сортувальними коліями зчленованими автономними базовими структурами” (за перерізом А, Фіг.1); Фіг.3 - пристрій для пересування контейнерів та/або контейнерних платформ в режимі “Пересування контейнерів автономними базовими структурами”; Фіг.4 - пристрій для пересування контейнерів та/або контейнерних платформ в режимі “Пересування контейнера однією з автономних базових структур у вигляді пролітного козлового крану”. Нумерація позицій пристрою, що пропонується: 1 - перша автономна базова структура у вигляді пролітного козлового крану; 2 - опори першої автономної базової структури; 3 - колеса першої автономної базової структури; 4 - поперечна пересувна балка першої автономної базової структури; 5 - вузол вертикально-горизонтального переміщення контейнерів та/або контейнерних платформ першої автономної базової структури; 6 - захисна діелектрична накладка балки першої автономної базової структури; 7 - друга а втономна базова структура у вигляді пролітного козлового крану; 5 36212 8 - опори другої автономної базової структури; 9 - колеса другої автономної базової структури; 10 - поперечна пересувна балка другої автономної базової структури; 11 - вузол вертикально-горизонтального переміщення контейнерів та/або контейнерних платформ другої автономної базової структури; 12 - захисна діелектрична накладка балки другої автономної базової структури; 13 - перший елемент з'єднування автономних базових структур; 14 - другий елемент з'єднування автономних базових структур; 15 - вантажний захват; 16 - перша сортувальна колія; 17 - друга сортувальна колія; 18 - головна колія; 19 - окремій контейнер на контейнерній платформі; 20 - перший вантажний перон; 21 - перший автотранспортний портал; 22 - пандус; 23 - другий вантажний перон; 24 - другий авто транспортний портал; 25 - контейнерна платформа в положенні «Розвантаження»; 26 - контейнерна платформа в положенні «Завантаження»; 27 - окремій контейнер в положенні “Автотранспортній портал”; 28 - контейнерна платформа в положенні “Пересування між сортувальними коліями”; 29 - окремій контейнер в положенні “Пересування пролітним козловим краном”; 30 - вузол зчленування балок першої та другої автономних базових стр уктур; 31 - напрямні першої автономної базової структури; 32 - напрямні другої автономної базової структури; 33 - вхідні-вихідні стрілки контейнерного терміналу. Пристрій для пересування контейнерів та/або контейнерних платформ містить першу автономну базову структуру (1), оснащену колесами (3), причому на першій автономній базовій структурі (1) розміщена поперечна балка (4) з вузлом (5) вертикально-горизонтального переміщення вантажів (контейнерів або контейнерних платформ), якій оснащений вантажним захватом (15). Перша автономна базова структура (1) також оснащена індивідуальною системою керування сортувальноперевалочними операціями з піднімання та/або пересування контейнерів та/або контейнерних платформ і виконана у вигляді пролітного козлового крану на опорах (2), які оснащені колесами (3), що р ухаються по напрямним (31), при цьому один торець поперечної балки (4) пролітного козлового крану додатково оснащений елементом з'єднування (13), поперечна балка (4) першої автономної базової структури (1) є пересувною та має захисну діелектричну накладку (6). Пристрій містить другу автономну базову стр уктуру (7), оснащену колесами (9), причому на дру 6 гій автономній базовій структурі (7) розміщена поперечна балка (10) з вузлом (11) вертикальногоризонтального переміщення вантажів (контейнерів або контейнерних платформ), якій оснащений вантажним захватом, аналогічним захвату (15). Друга автономна базова структура(7) також оснащена індивідуальною системою керування сортувально-перевалочними операціями з піднімання та/або пересування контейнерів і виконана у вигляді пролітного козлового крану на опорах (8), які оснащені колесами (9), що рухаються по напрямним (32), при цьому один торець поперечної балки (10) пролітного козлового крану додатково оснащений елементом з'єднування (14), поперечна балка (10) другої автономної базової структури (7) є пересувною та має захисну діелектричну накладку (12). При з'єднуванні елементи (13 та 14) утворюють вузол (30) зчленування згаданих балок (4 та 10), створюючи тим самим з автономних базових структур (1 та 7) варіант пристрою (Фіг.1 та 2) для пересування контейнерних платформ (позиція 28 на Фіг.1 та 2) між сортувальними коліями (16 та 17) та/або контейнерів між автотранспортними порталами (21 та 24), та/або між вантажними перонами (20 та 23), та/або між сортувальними коліями (16 та 17). Пролітні козлові крани розташовані на протилежних вантажних перонах (20 та 23), кожний з яких оснащений напрямними (31 та 32) для повздовжнього переміщення відповідних пролітних козлових кранів (1 та 7). Між вантажними перонами (20 та 23), що обладнані пандусами (22) і оснащені автотранспортними порталами (21 та 24), розташовані сортувальні колії (16 та 17) для розміщення потягів та/або окремих контейнерних платформ (25, 26 та 28), при цьому сортувальні колії (16 та 17) з'єднані з головною колією (18) вхідними-вихідними стрілками (33). На Фіг.1-3 потяги на сортувальних коліях (16 та 17) не вказані, їх імітують контейнерні платформи 25, 26. Знаходження контейнерної платформи у позиції 28 на фіг.1 та 2 демонструє етап процесу пересування контейнерної платформи між сортувальними коліями (16 та 17) зчленованими автономними базовими структурами (1 та 7). Контейнер в позиції 29 на Фіг.4 демонструє один з етапів процесу пересування контейнера між опорами (2 або 8) відповідної автономної базової структури (1 або 7). Пристрій, що пропонується, в режимі “Пересування контейнерної платформи між сортувальними коліями зчленованими автономними базовими структурами” (вид зверху) наведений на Фіг1 та 2. Система електричних підвісних дротів на фіг.1 та інших фігурах не наведена. На Фіг.2 потяги імітуються контейнерними платформами (25 та 26), що розташовані на сортувальних коліях (16 та 17). На Фіг4 наведений приклад використання пристрою в режимі “Пересування контейнера однією з автономних базових структур у вигляді пролітного козлового крану”: контейнер (29) переміщується між опорами (2) пролітного козлового крану (1 або 7 36212 7). Аналогічно ця операція виконується автономною базовою структурою (7). Пристрій для пересування контейнерів та/або контейнерних платформ працює наступним чином. З головної колії (18) на сортувальні колії (16 та 17) можуть прибувати або потяги/маршрути або окремі контейнерні платформи (див. Фіг.1, 2). Тому на сортувальних коліях (16 та 17) одночасно можуть знаходитись від одного до двох потягів, у складах кожного з яких необхідно змінювати кількість та/або послідовність контейнерів (наприклад, 19, 27 та 29) та/або контейнерних платформ (наприклад, 25, 26 та 28), або декілька контейнерних платформ (25 та 26), які необхідно завантажувати або розвантажувати (Фіг.3, 4). Наприклад, необхідно розвантажити контейнерну платформу (25), тобто пересунути контейнер (27) або на перший (20) вантажний перон, або в зону першого (21) автотранспортного порталу (Фіг.3). Необхідна сукупність сортувальноперевалочних операцій виконується першою (1) автономною базовою структурою під керуванням індивідуальної системи керування електронними, радіо- або іншими видами зв'язків. Для цього перша (1) автономна базова структура на колесах (3) переміщується по напрямним (31) вздовж першого (20) вантажного перону і встановлюється у необхідну позицію відносно контейнерної платформи (25), вузол (5) вертикально-горизонтального переміщення контейнерів за допомогою вантажного захвату (15) з'єднується з контейнером (27). Далі, перша (1) автономна базова структура, вузол (5) і поперечна пересувна балка (4), здійснюючи відповідні рухи у всіх трьох площинах, переміщують контейнер (27) або на перший (20) вантажний перон (20), або в зону автотранспортного порталу (21), або безпосередньо на автотранспортний засіб. З метою більш рельєфного висвітлення головної мети винаходу на Фіг.1-4 автотранспортні засоби не наведені. Інший приклад. Необхідно завантажити контейнерну платформу (26) контейнером (19), якій може бути розташований або на другому (23) вантажному пероні або на другому (24) автотранспортному порталі. Необхідна сукупність сортувальноперевалочних операцій виконується аналогічно вище розглянутому прикладу. Для цього друга (2) автономна базова структура у відповідності до сигналів від індивідуальної системи керування електронними, радіо- або іншими видами зв'язків по напрямним (32) переміщується вздовж другого (23) вантажного перону, її вузол (11) вертикальногоризонтального переміщення контейнерів за допомогою вантажного захвату з'єднується з контейнером (19). Далі, друга (2) автономна базова структура, вузол (11) і поперечна пересувна балка (10), здійснюючи відповідні рухи у всі х трьох площинах, встановлюють контейнер (19) на контейнерну платформу (26). Переміщення контейнерних платформ (наприклад, 25 та/або 26, Фіг.3) з однієї сортувальної колії на іншу (Фіг.1 та 2) здійснюється після зчленування автономних базових структур (1 та 2). Для цього одна з індивідуальних систем керування електронними, радіо- або іншими видами зв'язків 8 обирається ведучою (головною). За її командами автономні базові структури (1 та 7) розташовуються одна навпроти одної, елементи (13 та 14), що знаходяться на торцях поперечних пересувних балок (4 та 10), з'єдн уються і утворюють вузол (30) зчленування поперечних пересувних балок (4 та 10). У такому структурному варіанті реалізації пристрою (Фіг.1 та 2) забезпечується можливість як подовжнього, так і поперечного пересування контейнерних платформ між сортувальними коліями (16 та 17) при синхронному русі об'єднаних автономних базових стр уктур (1 та 7) по напрямним (31 та 32). Цей варіант реалізації структурних зв'язків між складовими пристрою, що пропонується, дозволяє також пересувати контейнери між протилежними складовими контейнерного терміналу, тобто між: автотранспортними порталами (21 та 24); вантажними перонами (20 та 23); сортувальними коліями (16 та 17). Наявність у складі пристрою, що пропонується, діелектричних накладок (6 та 12) на поперечні пересувні балки (4 та 10) забезпечує безпечну роботу пристрою під системою електричних підвісних дротів і виключає витрату часу на її знеструмлення під час виконання сортувальноперевалочних операцій. Таким чином, використання пристрою, що пропонується, на сортувально-перевалочному контейнерному терміналі забезпечує можливість: - ефективного використання менш потужних автономних базових структур у вигляді пролітних козлових кранів для виконання операцій з пересування контейнерів; - надійного пересування контейнерних платформ шляхом створення підсиленої механічної системи з двох менш потужних автономних базових стр уктур; - суттєво зменшити час та/або вартість, та/або оптимізувати сукупність параметрів “час-вартість” виконання сортувально-перевалочних операцій на поточному сортувально-перевалочному контейнерному терміналі; - під час виконання сортувально-перевалочних операцій на поточному сортувальноперевалочному контейнерному терміналі враховувати обсяг і номенклатуру вантажів як мінімум на наступному сортувально-перевалочному контейнерному терміналі. Наприклад, на поточному контейнерному терміналі своєчасно ввести до складу або вилучити зі складу потягу/маршруту контейнерні платформи та/або розташува ти контейнері на контейнерних платформах потягу/маршруту, що формується, з урахуванням номенклатури і розташування контейнерів мінімум на наступному контейнерному терміналі. Послідовне застосування такого варіанту оптимізації надає можливість створення і реалізації покрокової системи оптимізації, яка, як відомо, є суттєво простішою порівняно з загально-маршрутною (глобальною) системою оптимізації контейнерних перевезень; - вирішити проблему електричної безпеки при виконанні операцій з пересування контейнерів та/або контейнерних платформ під системою електричних підвісних дротів і тим самим виключити витрати часу, необхідного для обов'язкового зне 9 36212 струмлення системи електричних підвісних дротів під час виконання сортувально-перевалочних операцій; - виключення сортувальних гірок зі складу процесу здійснення сортувально-перевалочних операцій під час контейнерних перевезень. Однією з основних переваг винаходу, що пропонується, є також те, що він відкриває новий ме 10 тод підвищення конкурентної спроможності контейнерних перевезень по існуючої сукупності рейкових і безрейкових шляхів. Оскільки було описано кілька варіантів структури пристрою, що пропонується, фа хівцям зрозуміло, що можливі й інші конфігурації пристрою в межах обсягу корисної моделі, викладеного в її формулі. 11 Комп’ютерна в ерстка C.Литв иненко 36212 Підписне 12 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for displacement of containers and/or container platforms
Автори англійськоюZhabeiev Volodymyr Pavlovych, Zhabieev Heorhii Volodymyrovych, Zhabieev Pavlo Volodymyrovych
Назва патенту російськоюУстройство для передвижения контейнеров и/или контейнерных платформ
Автори російськоюЖабеев Владимир Павлович, Жабеев Георгий Владимирович, Жабеев Павел Владимирович
МПК / Мітки
МПК: B61D 47/00
Мітки: пристрій, пересування, контейнерних, платформ, контейнерів
Код посилання
<a href="https://ua.patents.su/6-36212-pristrijj-dlya-peresuvannya-kontejjneriv-ta-abo-kontejjnernikh-platform.html" target="_blank" rel="follow" title="База патентів України">Пристрій для пересування контейнерів та/або контейнерних платформ</a>
Пристрій для пересування контейнерів
Номер патенту: 73145
Опубліковано: 15.06.2005
Автори: Віраг Лайош, Брезовітш Ласло
МПК: B61D 47/00
Мітки: пересування, контейнерів, пристрій
Формула / Реферат:
1. Пристрій для піднімання та/або пересування контейнерів, що містить базову структуру (3), оснащену колесами (2), противагою (10) і опорами (5) з обох боків; причому на базовій структурі (3) паралельно осям згаданих коліс (2) розміщені поперечні балки (4), а на цих балках утримуються вузли піднімання контейнера, який відрізняється тим, що базова структура (3) містить дві вагонетки 1, які розміщені так, що одна з одною вони складають дві...
Пристрій для захисту опор морських стаціонарних платформ від дії льоду
Номер патенту: 33417
Опубліковано: 25.06.2008
Автори: Ажермачов Геннадій Арсентійович, Ажермачов Сергій Геннадійович
МПК: E02B 17/00, E02B 15/00
Мітки: дії, захисту, платформ, морських, пристрій, льоду, опор, стаціонарних
Формула / Реферат:
1. Пристрій для захисту опор морських стаціонарних платформ від дії льоду, що включає закріплений на опорі зрізаний конус, розміщений меншою основою вниз, з наскрізним отвором поздовж висоти, виконаний з можливістю ковзання поздовж опори, який містить порожнину, що сполучена з баластним насосом, розміщені на зовнішній поверхні конуса поздовжні ребра, який відрізняється тим, що додатково містить закріплену на консолі з можливістю радіального...
Пристрій для захисту опор морських стаціонарних платформ від дії льоду
Номер патенту: 15550
Опубліковано: 17.07.2006
Автори: Ажермачов Сергій Геннадійович, Ажермачов Геннадій Арсентійович
МПК: E02B 15/00, E02B 17/00
Мітки: льоду, морських, опор, стаціонарних, дії, захисту, платформ, пристрій
Формула / Реферат:
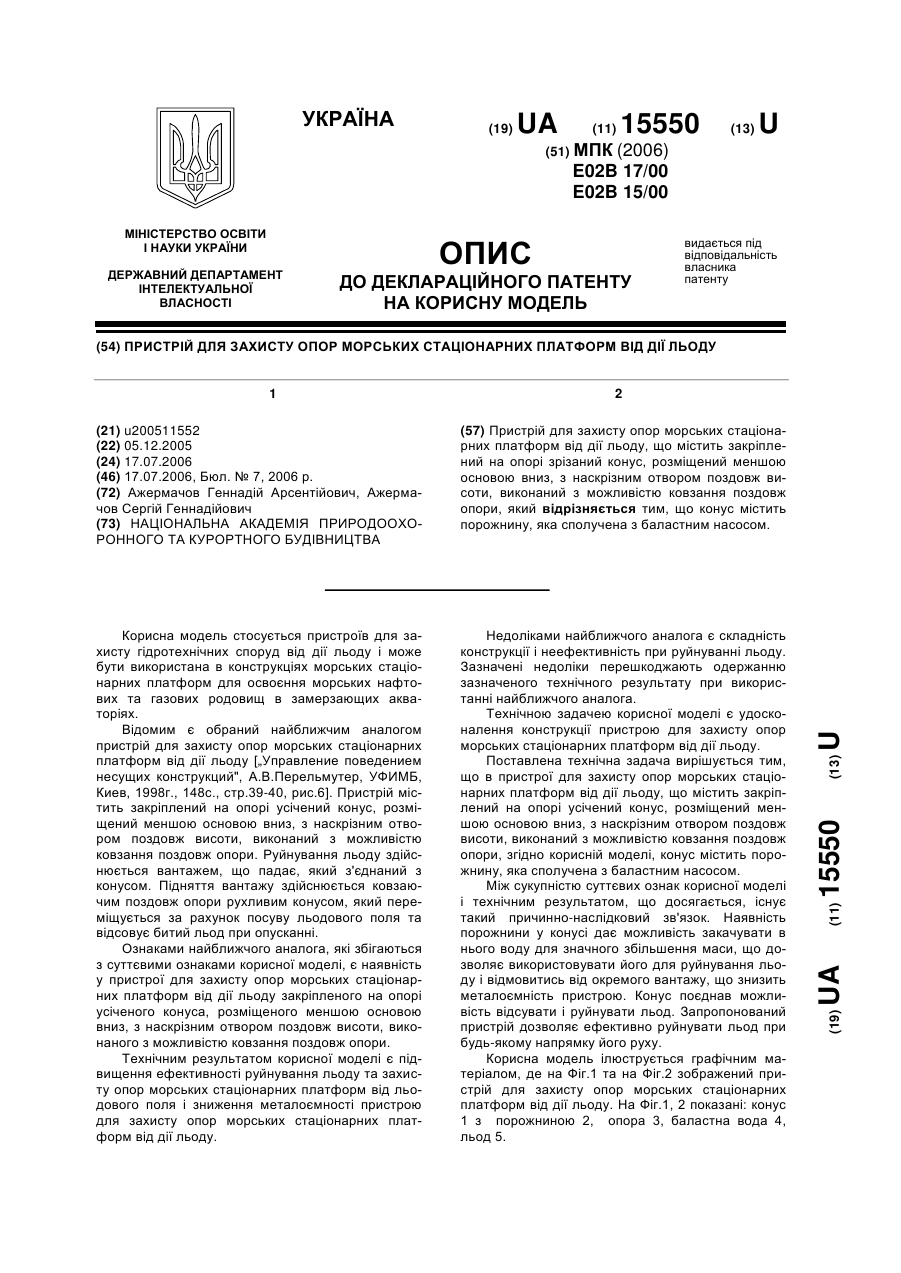
Пристрій для захисту опор морських стаціонарних платформ від дії льоду, що містить закріплений на опорі зрізаний конус, розміщений меншою основою вниз, з наскрізним отвором поздовж висоти, виконаний з можливістю ковзання поздовж опори, який відрізняється тим, що конус містить порожнину, яка сполучена з баластним насосом.
Пристрій для захисту опор морських стаціонарних платформ від дії льоду
Номер патенту: 24180
Опубліковано: 25.06.2007
Автори: Ажермачов Геннадій Арсентійович, Ажермачов Сергій Геннадійович
МПК: E01B 17/00, E02B 15/00
Мітки: платформ, захисту, морських, льоду, дії, опор, пристрій, стаціонарних
Формула / Реферат:
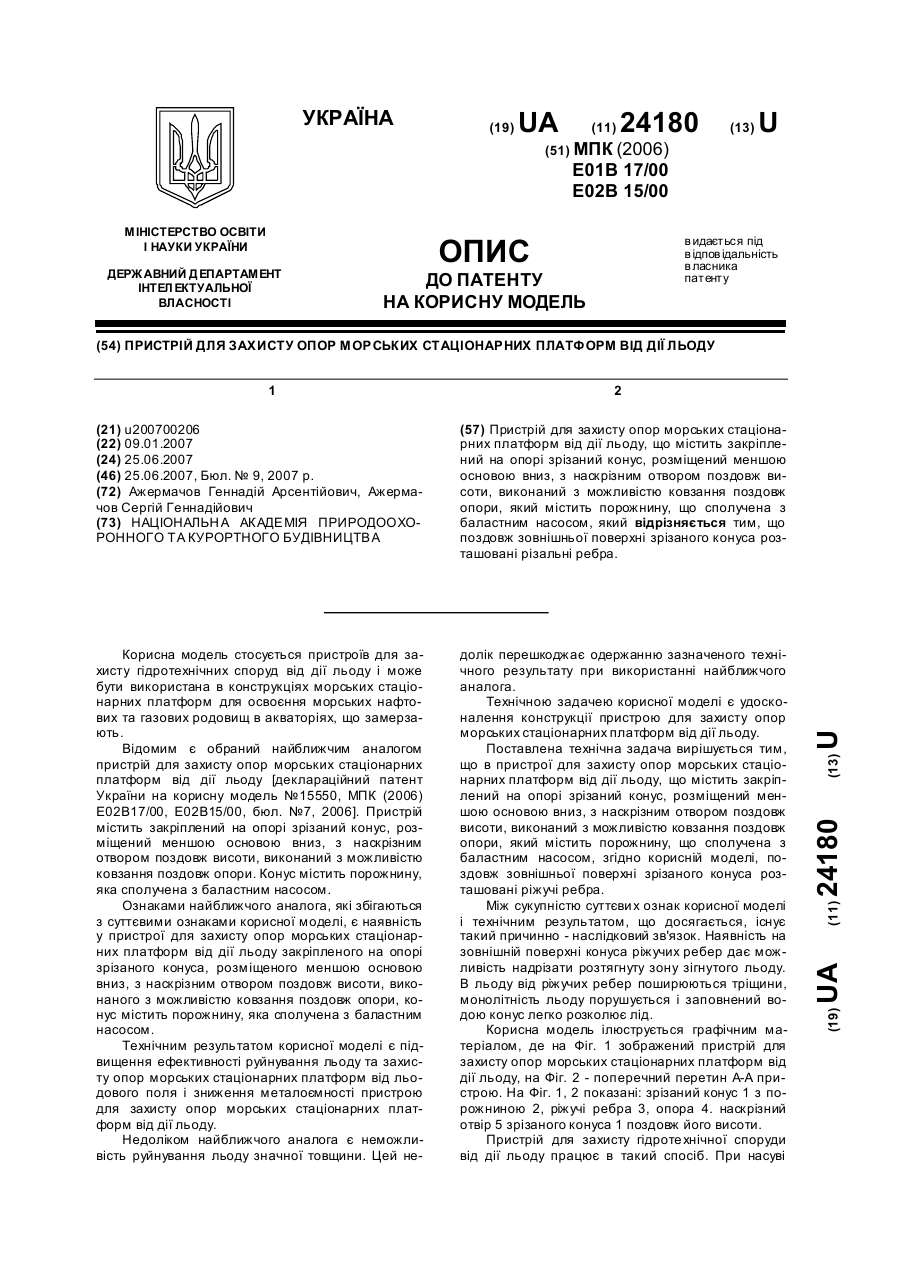
Пристрій для захисту опор морських стаціонарних платформ від дії льоду, що містить закріплений на опорі зрізаний конус, розміщений меншою основою вниз, з наскрізним отвором поздовж висоти, виконаний з можливістю ковзання поздовж опори, який містить порожнину, що сполучена з баластним насосом, який відрізняється тим, що поздовж зовнішньої поверхні зрізаного конуса розташовані різальні ребра.
Пристрій для пересування шпал
Номер патенту: 68527
Опубліковано: 16.08.2004
Автори: Кучеренко Володимир Миколайович, Баламут Марія Миколаївна, Храпач Леонід Миколайович
МПК: E01B 27/00
Мітки: пересування, шпал, пристрій
Формула / Реферат:
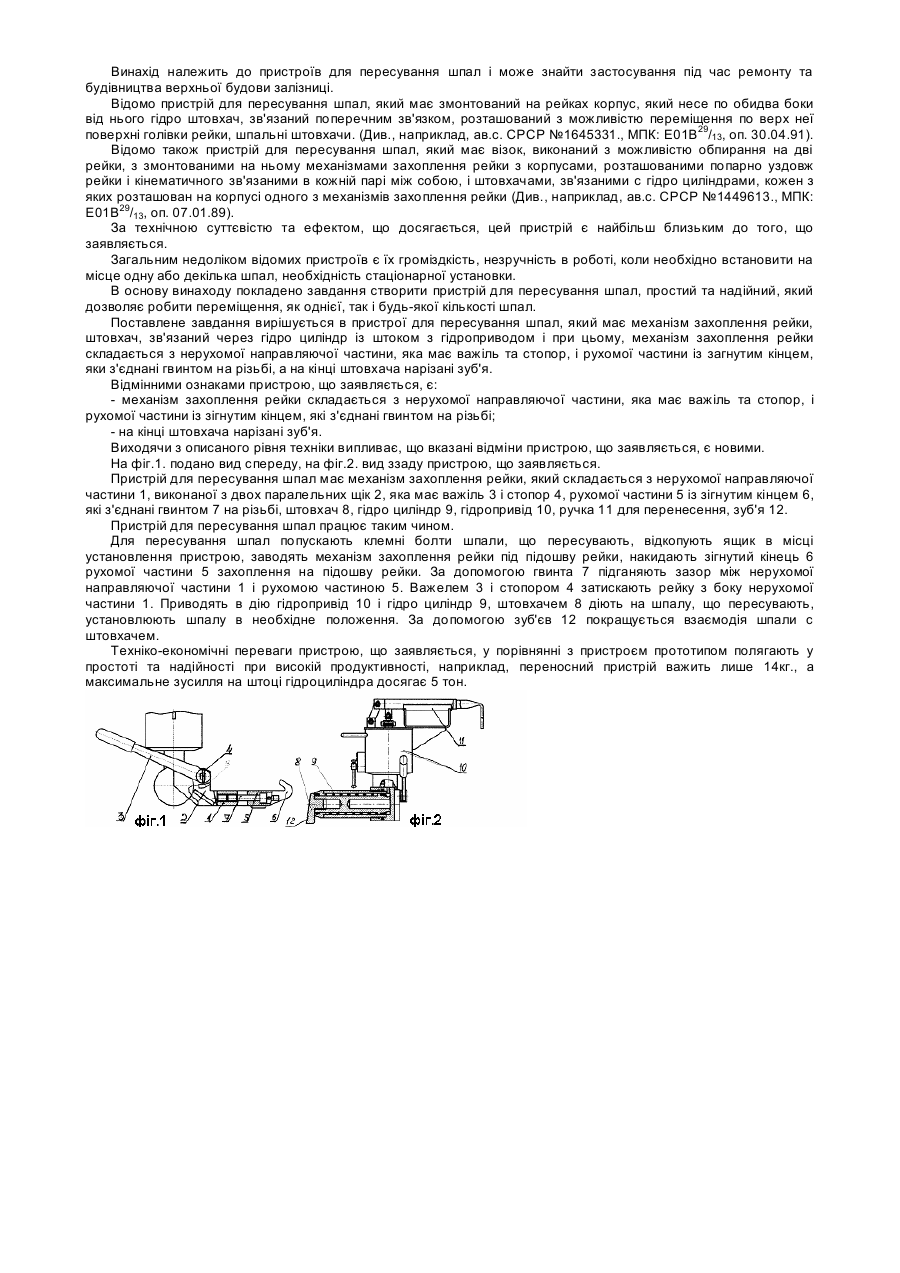
Пристрій для пересування шпал, який має механізм захоплення рейки, штовхач, зв'язаний через гідроциліндр із штоком з гідроприводом, який відрізняється тим, що механізм захоплення рейки складається з нерухомої направляючої частини, яка має важіль та стопор, і рухомої частини із загнутим кінцем, які з'єднані гвинтом на різьбі, а на кінці штовхача нарізані зубці.
Попередній патент: Спосіб вогнезахищеної обробки целюлозовмісних матеріалів
Наступний патент: Штучна приманка для риболовлі
Випадковий патент: Диван-ліжко