Спосіб керування роботою апарата вакуумної терапії та пристрій для його здійснення
Номер патенту: 43186
Опубліковано: 15.11.2001
Автори: Пономарьов Юрій Максимович, Каплін Генадій Іванович, Лоскуткін Віктор Миколайович, Молошний Михайло Володимирович, Скідан Василь Іванович, Володось Микола Леонтіїйович
Формула / Реферат
1. Спосіб керування роботою апарата вакуумної терапії шляхом періодичної подачі на електродвигун вакуум-помпи апарата розрахункової напруги і відключення її при досягненні фактичного рівня розрідження в апараті, що дорівнює заданому, який відрізняється тим, що подачу напруги на електродвигун здійснюють дискретно, збільшуючи тривалість імпульсу напруги у міру зниження різниці між заданим і фактичним рівнями розрідження пропорційно навантаженню на електродвигун.
2. Пристрій керування роботою апарата вакуумної терапії за п. 1, що містить давач фактичного розрідження, сполучений з вакуум-помпою і приймальною ємкістю та з'єднаний з автоматичним регулятором розрідження, що взаємодіє з вимикачем електродвигуна вакуум-помпи, який відрізняється тим, що автоматичний регулятор розрідження виконаний у вигляді послідовно з‘єднаних з'єднаних поміж собою аналого-цифрового перетворювача, зв'язаного через підсилювач з давачем фактичного розрідження, процесора і широтно-імпульсного модулятора, при цьому як давач фактичного розрідження використаний тензодавач а як вимикач електродвигуна вакуум-помпи -транзистор, що підключений до модулятора
Текст
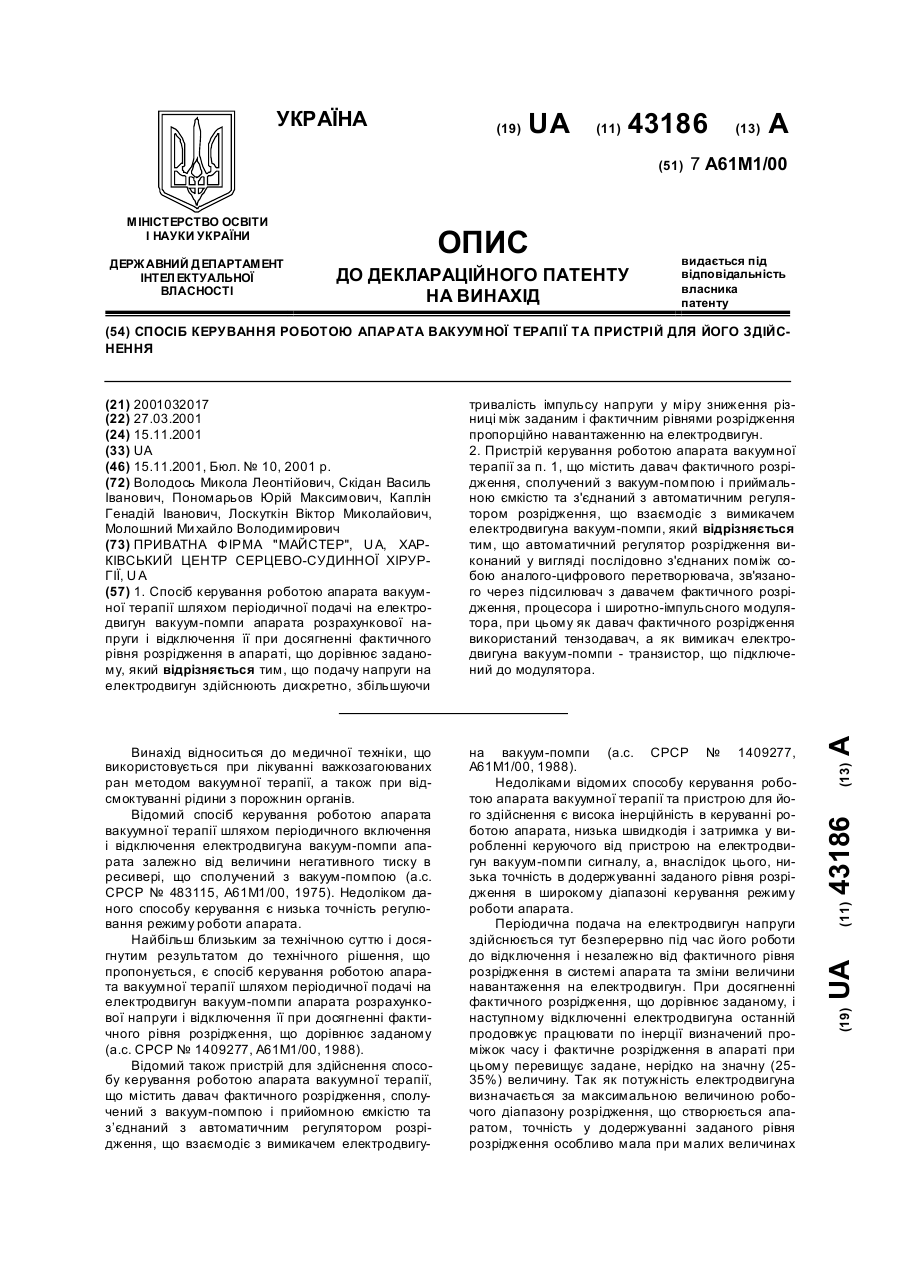
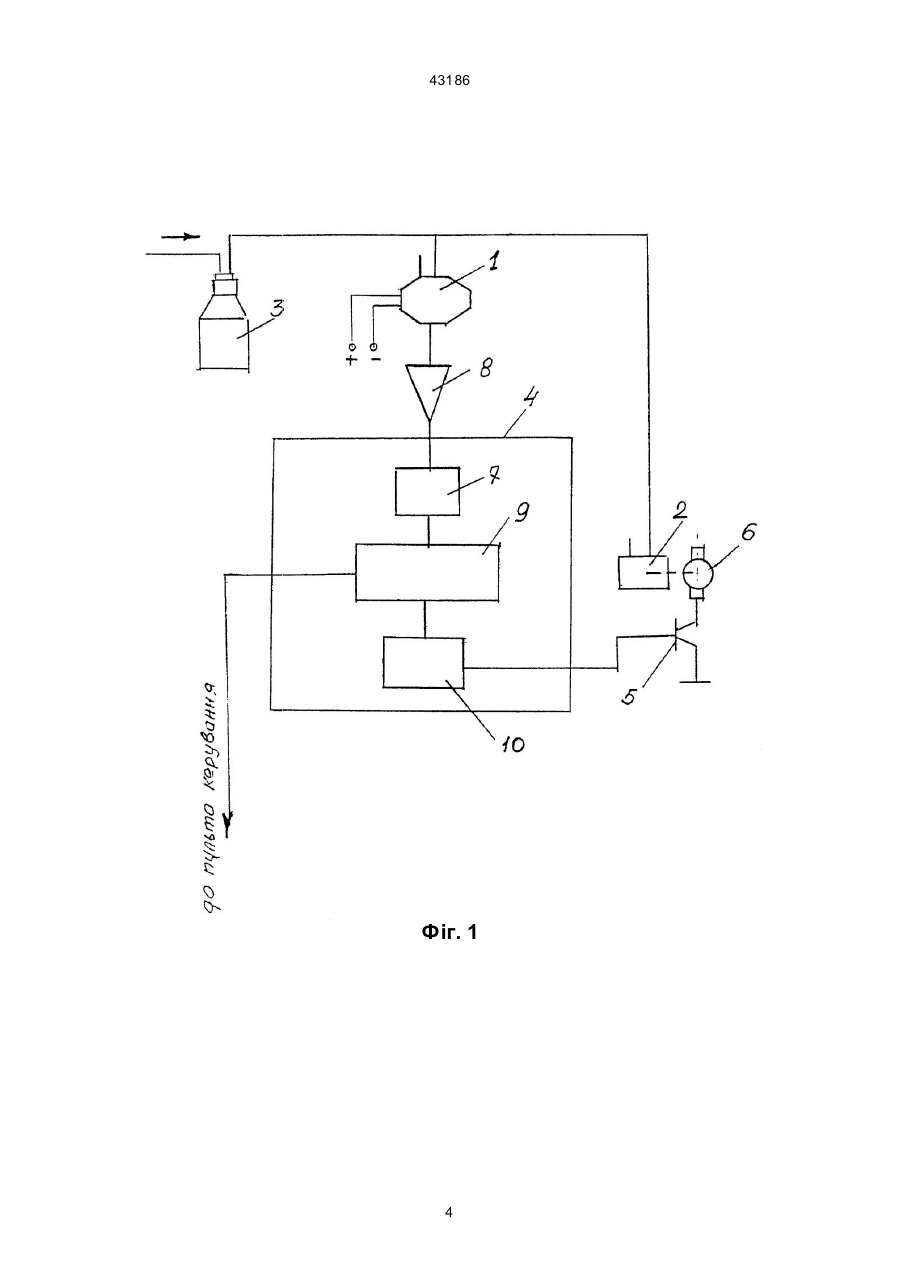
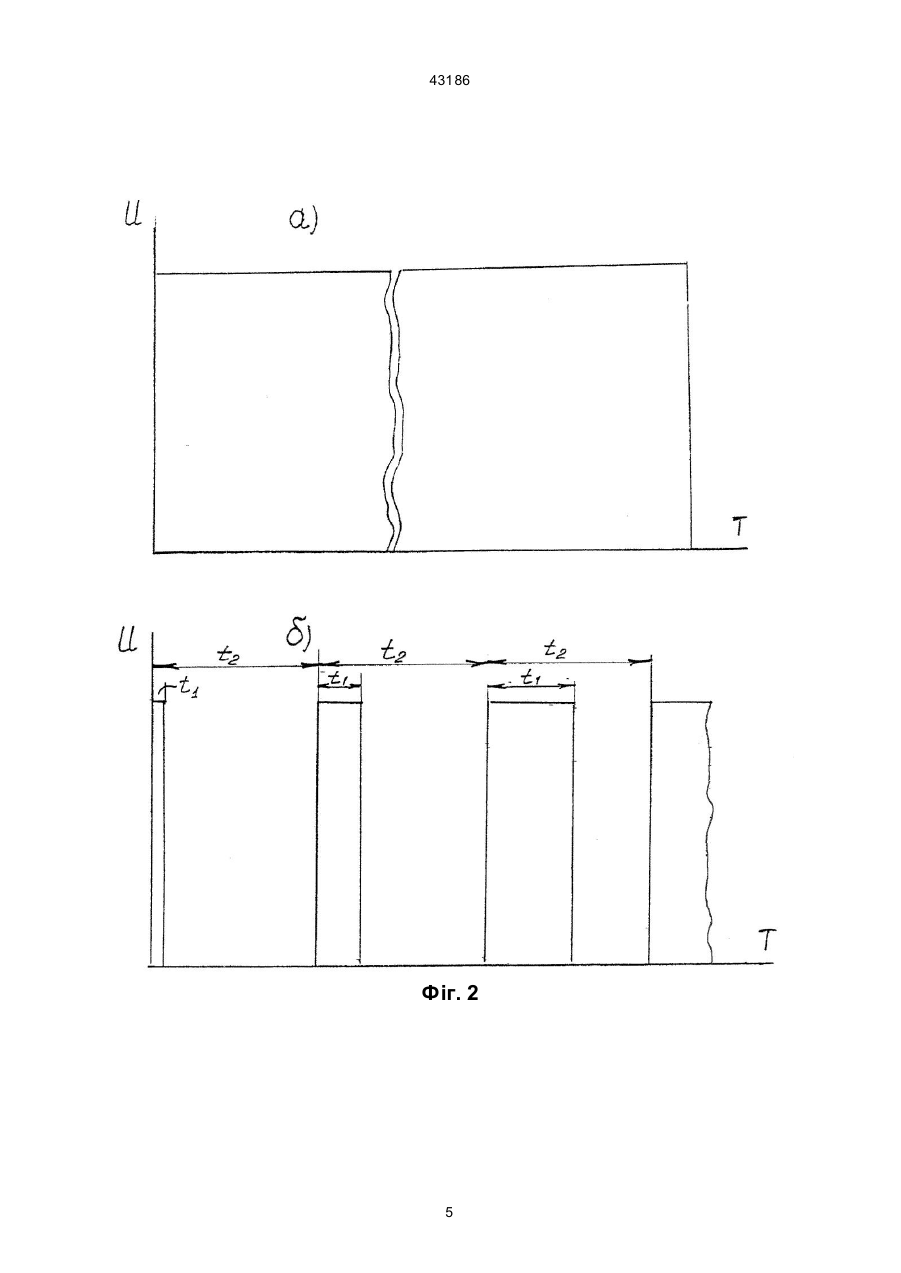
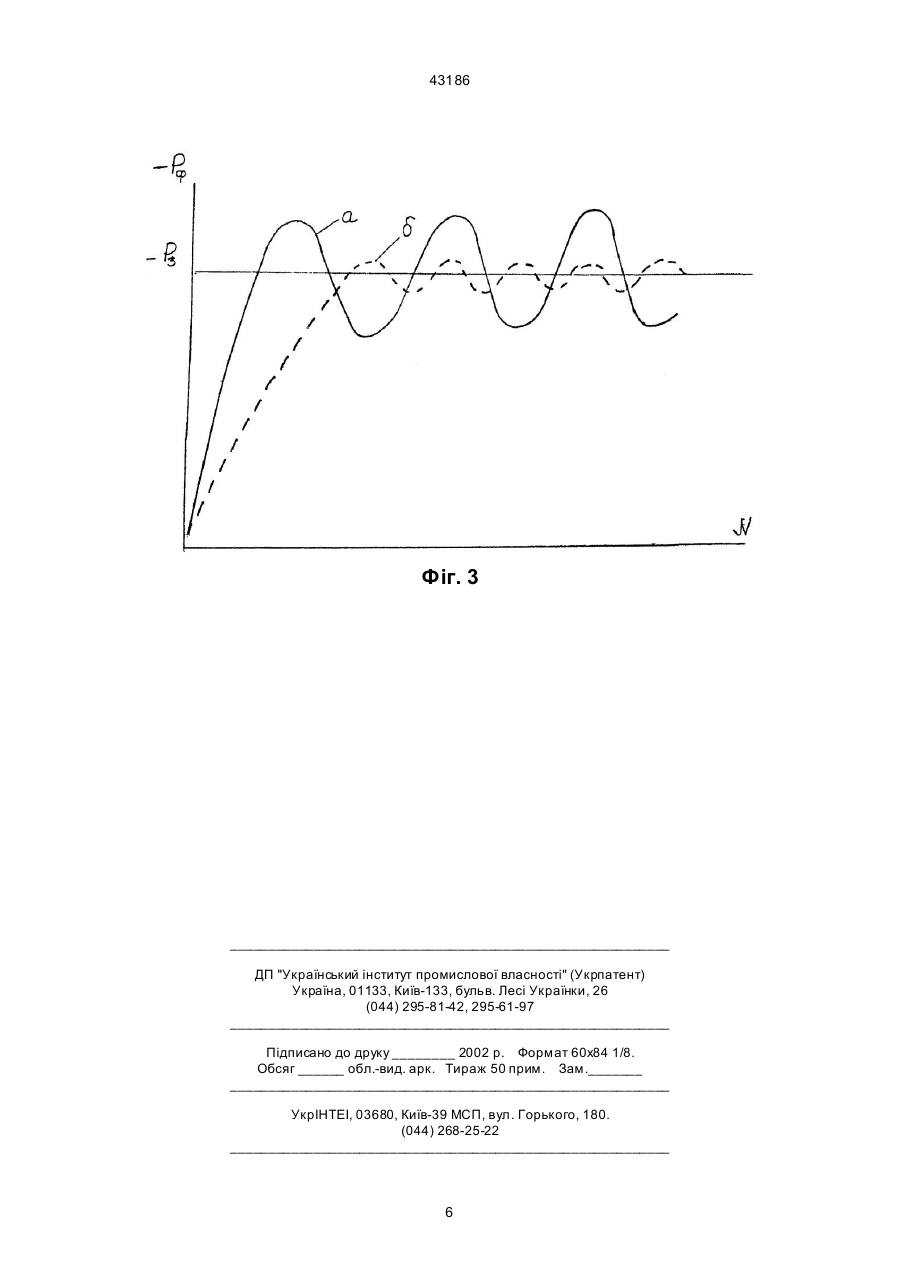
1. Спосіб керування роботою апарата вакуумної терапії шляхом періодичної подачі на електродвигун вакуум-помпи апарата розрахункової напруги і відключення її при досягненні фактичного рівня розрідження в апараті, що дорівнює заданому, який відрізняється тим, що подачу напруги на електродвигун здійснюють дискретно, збільшуючи 43186 розрідження, при яких негативно позначається надлишок потужності двигуна. На підвищенні інерційності в керуванні роботою апарата, а отже, на зниженні точності в додержуванні заданого рівня розрідження також позначається конструктивне виконання пристрою для керування роботою апарата. Автоматичний регулятор розрідження у відомому пристрої виконаний у вигляді сполучених між собою гідравлічних камер, одна з яких має мембрану, що зв'язана за допомогою штока з давачем фактичного розрідження мембранного типу. В свою чергу, шток зазначеного давача механічно зв’язаний з контактним вимикачем електродвигуна вакуум-помпи. Використання в пристрої давача фактичного розрідження мембранного типу, контактного вимикача електродвигуна, механічний зв'язок його з автоматичним регулятором розрідження не забезпечує потрібну швидкодію у керуванні роботою апарата при будь-якому діапазоні його роботи і створює затримку за часом у виробленні керуючого сигналу від регулятора на електродвигун при зміні різниці між фактичним та заданим рівнями розрідження в ту чи іншу сторону. Завдання сучасного винаходу полягає у створенні способу керування роботою апарата вакуумної терапії та пристрою для його здійснення, що забезпечують тривалість подачі на електродвигун вакуум-помпи напруги, а отже виробляючу ним потужність пропорціонально рівню розрідження на заданий проміжок роботи електродвигуна, а також потрібну швидкодію по виробленню керуючого сигналу від регулятора на електродвигун, а, внаслідок цьому, підвищують точність у додержуванні заданого рівня розрідження у широкому діапазоні регулювання режиму роботи апарата. Поставлене завдання вирішується тим, що в способі керування роботою апарата вакуумної терапії шляхом періодичної подачі на електродвигун вакуум-помпи апарата розрахункової напруги і відключення її при досягненні фактичного рівня розрідження в апараті, що дорівнює заданому, відповідно до винаходу подачу напруги на електродвигун здійснюють дискретно, збільшуючи тривалість імпульсу напруги по мірі зниження різниці між заданим і фактичним рівнями розрідження пропорціонально навантаженню на електродвигун. У пристрої для здійснення способу керування роботою апарата вакуумної терапії, що містить давач фактичного розрідження, сполучений з вакуум-помпою і прийомною ємкістю та з’єднаний з автоматичним регулятором розрідження, що взаємодіє з вимикачем електродвигуна вакуум-помпи, відповідно до винаходу автоматичний регулятор розрідження виконаний у вигляді послідовно з’єднаних проміж собою аналого-цифрового перетворювача, зв’язаного через підсилювач з давачем фактичного розрідження, процесора і широтноімпульсного модулятора, при цьому в якості давача фактичного розрідження використаний тензодавач, а в якості вимикача електродвигуна - транзистор, що підключений до модулятора. Порівняння способу керування роботою апарата вакуумної терапії і пристрою для його здійснення, що пропонуються, з прототипами свідчить, що новими ознаками тут є такі: а) у способі Подачу напруги на електродвигун вакуумпомпи здійснюють дискретно, збільшуючи тривалість імпульсу напруги по мірі зниження різниці між заданим і фактичним рівнями розрідження пропорціонально навантаженню на електродвигун. б) у пристрої 1. Виконання автоматичного регулятора розрідження у вигляді послідовно з'єднаних проміж собою аналого-цифрового перетворювача, зв'язаного через підсилювач з давачем фактичного розрідження, процесора і широтно-імпульсного модулятора. 2. Використання в якості давача фактичного розрідження тензодавача. 3. Використання в якості вимикача електродвигуна вакуум-помпи транзистора, що підключений до модулятора. Дискретна подача напруги на електродвигун вакуум-помпи при збільшенні тривалості імпульсу напруги по мірі зниження різниці між заданим і фактичним рівнями розрідження забезпечує потужність, що розвиває електродвигун, відповідно до рівня фактичного розрідження в апараті на будьякий проміжок часу роботи електродвигуна і попереджує, таким чином, надмірний розгін електродвигуна при відключенні подачі на нього напруги, що підвищує точність у додержуванні заданого рівня розрідження в усьому діапазоні роботи апарата. Виконання автоматичного регулятора розрідження у вигляді послідовно з’єднаних проміж собою аналого-цифрового перетворювача, зв’язаного через підсилювач з давачем фактичного розрідження, процесора і широтно-імпульсного модулятора, використання в якості давача фактичного розрідження тензодавача, а в якості вимикача електродвигуна - транзистора, що підключений до модулятора, забезпечує за рахунок використання в конструкції пристрою елементів мікроелектроніки та відсутності механічної взаємодії між собою підвищення швидкодії у виробці керуючого сигналу від регулятора на електродвигун незалежно від величини навантаження на нього, а отже високу точність керування роботою апарата. Рішень із схожими ознаками при патентних шуканнях не знайдено. Це дозволяє зробити висновок, що дане технічне рішення (спосіб роботи та пристрій для його здійснення) є новим, промислово придатним та має винахідницький рівень. Винахід пояснюється малюнками, де на фіг. 1 зображена функціональна схема пристрою для здійснення способу керування роботою апарата вакуумної терапії, на фіг. 2 - графік подання напруги U на електродвигун за час одного циклу T включення і роботи апарата: а) згідно з відомим способом керування роботою апарата; б) згідно із способом, що пропонується; на фіг. 3 - графік зміни фактичного розрідження - Pф від заданого - Pз рівня розрідження під час N роботи апарата: а) згідно з відомим способом керування роботою апарата; б) згідно із способом, що пропонується. Пристрій для керування роботою апарата вакуумної терапії містить давач 1 фактичного розрідження, сполучений з вакуум-помпою 2 і прийомною ємкістю 3 та з'єднаний з автоматичним регу 2 43186 лятором розрідження 4, що взаємодіє з вимикачем 5 електродвигуна 6 вакуум-помпи. Регулятор 4 розрідження виконаний у вигляді послідовно з'єднаних проміж собою аналогоцифрового перетворювача 7, зв'язаного через підсилювач 8 з давачем 1, процесора 9 і широтноімпульсного модулятора 10. Давач 1 фактичного розрідження виконаний у вигляді тензодавача, а в якості вимикача 5 електродвигуна використаний транзистор, що підключений до модулятора. Спосіб керування роботою апарата вакуумної терапії за допомогою вищезазначеного пристрою здійснюється таким чином. Через пульт керування апарата (на малюнках не позначений) в регістр пам'яті процесора 9 вводять цифрове позначення заданого рівня розрідження – Pз, після встановлення якого здійснюють підключення давача і фактичного розрідження до джерела напруги U. Сигнал, що виробляється давачем 1, надається через підсилювач 8 до аналого-цифрового перетворювача 7, а через нього - в регістр пам'яті фактичного розрідження процесора 9. Внаслідок різниці між заданим – Pз і фактичним - Pф рівнями розрідження сигнал від процесора надходить до модулятора 10, котрий через транзистор 5 здійснює дискретну подачу імпульсів напруги U тривалістю t1 на електродвигун 6. Тривалість t2 такту подачі імпульсу встановлюють шляхом регулювання частотно-тактових характеристик модулятора 10 згідно з робочим діапазоном регулювання розрідження апарата та потужністю, що розвивається електродвигуном, на даний проміжок часу його роботи. При значній різниці заданим - Pз і фактичним Pф рівнями розрідження в первинний момент подання напруги U на електродвигун тривалість імпульсу t1 подачі напруги, а отже і потужність, що розвивається двигуном, може бути недостатньою для його включення до роботи. По закінченню відповідної кількості подачі імпульсів напруги U тривалість t1 чергового імпульсу напруги U може бути достатньою для включення електродвигуна 6 вакуум-помпи через транзистор 5 в роботу, а в системі апарата через деякий час встановлюється відповідний рівень розрідження - Pф . При подальшій роботі апарата і збільшенні рівня розрідження, а отже, зменшенні різниці між заданим - Pз і фактичним - Pф рівнями розрідження модулятор 10 збільшує тривалість t1 подання імпульсу напруги U на електродвигун. Це попереджує самочинне гальмування електродвигуна і створює розгін його до потужності, яку він розвиває на даний час роботи. По закінченні зумовного проміжку часу і досягненні фактичного рівня розрідження - Pф , що дорівнює заданому - Pз, регулятор 4 розрідження подає сигнал на модулятор 10 про припинення подання напруги на електродвигун 6 вакуум-помпи. Виконання регулятора 4 розрідження з елементів мікроелектроніки, а також виконання давача і фактичного розрідження у вигляді тензодавача і використання транзистора як вимикача 5 електродвигуна забезпечує підвищен у швидкодію по виробленню керуючого сигналу від регулятора 4 на електродвигун 6, незалежно від величини навантаження на нього. Надмірний розгін електродвигуна при включенні подачі на нього напруги, а також надмірне фактичне розрідження - Pф , що створюється вакуум-помпою 2, при цьому незначні і не спростовується на точності в додержуванні заданого рівня розрідження - Pз апарата. За час розгерметизації системи апарата модулятор 10 знижує тривалість t1 вироблюваних ним імпульсів напруги, і при зрівнянні надмірного фактичного розрідження - Pф і заданого - Pз цикл включення до роботи електродвигуна вакуум-помпи повторюється. Висока швидкодія регулятора 4 розрідження створює умови, при яких зниження фактичного розрідження - Pф нижче заданого - Pз, а також тривалість передачі сигналу від модулятора 10 не вимикач 5 електродвигуна 6 є незначними, що позитивно позначається на точності в додержуванні заданого рівня розрідження. При цьому тривалість t1 подачі імпульсу напруги на електродвигун при його черговому включенні до роботи буде такою, величина якої була вироблена модулятором під час розгерметизації апарата. При збільшенні діапазону регулювання заданого рівня розрідження - Pз відповідно до цього збільшується тривалість t1 імпульсу подання напруги U на електродвигун під час його роботи пропорціонально підвищенню навантаження на нього і точність в додержуванні заданого рівня розрідження при цьому не порушується. Іспити способу керування роботою апарата вакуумної терапії та пристрою для його здійснення, що пропонуються, при лікуванні важкозагоюваних ран (трофічні виразки та інші) в діапазоні розрідження 50...350 мм. рт. ст. показали, що точність у дотриманні заданого рівня розрідження в порівнянні з відомими способом керування роботою апарата та пристроєм для його здійснення підвищується на 22-25%: погрішність по відношенню до заданих рівнів розрідження в зазначеному діапазоні роботи не перевищує 1,0 мм. рт. ст, в той час як зазначена похибка по відомому способу керування становить 3,5...5,0 мм. рт. ст. 3 43186 Фіг. 1 4 43186 Фіг. 2 5 43186 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ __________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 __________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for proving of apparatus work for vacuum therapy and apparatus
Автори англійськоюVolodos Mykola Leontiiovych, Volodos Mykola Leontiovych, Skydan Vasyl Ivanovych, Ponomarov Yurii Maksymovych, Kaplin Henadii Ivanovych, Loskutkin Viktor Mykolaiovych, Moloshnyi Mykhailo Volodymyrovych
Назва патенту російськоюСпособ управления работой аппарата вакуумной терапии и устройство для его осуществления
Автори російськоюВолодось Николай Леонтьевич, Володось Николай Леонтиевич, Скидан Василий Иванович, Пономарев Юрий Максимович, Каплин Геннадий Иванович, Лоскуткин Виктор Николаевич, Молошный Михаил Владимирович
МПК / Мітки
МПК: A61M 1/00
Мітки: вакуумної, керування, апарата, роботою, здійснення, спосіб, пристрій, терапії
Код посилання
<a href="https://ua.patents.su/6-43186-sposib-keruvannya-robotoyu-aparata-vakuumno-terapi-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування роботою апарата вакуумної терапії та пристрій для його здійснення</a>
Спосіб управління роботою та пристрій для його здійснення
Номер патенту: 30168
Опубліковано: 15.11.2000
Автори: Вишняк Євген Олександрович, Кириченко Євген Олексійович, Накидайло Артем Сергійович
Мітки: пристрій, управління, спосіб, роботою, здійснення
Формула / Реферат:
1. Спосіб управління роботою ерліфта, який включає подачу на всмоктування компресора атмосферного повітря, відсепарованого у ерліфті газу, який відрізняється тим, що попередньо задають умову відношення температур атмосферного повітря (Тн) та відсепарованого газу (Те) у процесі підйому пульпи регулюють шляхом зміни опору всмоктуючого патрубка витратний склад компонентів у...
Спосіб керування вологістю формувальних і стержневих сумішей в процесі їх автоматичного виготовлення і пристрій для його здійснення
Номер патенту: 25310
Опубліковано: 30.10.1998
Автори: Скрипник Олександр Вікторович, Горєва Ірина Іванівна, Кошурко Володимир Олексійович
МПК: B22C 5/00
Мітки: пристрій, сумішей, вологістю, формувальних, стержневих, здійснення, виготовлення, автоматичного, спосіб, процесі, керування
Формула / Реферат:
1. Спосіб керування вологістю формувальних і стержневих сумішей в процесі їх автоматичного виготовлення, який полягає в тому, що вологість замісу доводять до заданої по датчику, що безперервно стежить за вологістю замісу в чаші змішувача, який відрізняється тим, що керування подачею води здійснюють при одночасному вимірюванні вологості суміші в чаші змішувача, її температури, товщини її шару під котком змішувача і щільності.2. Пристрій...
Спосіб гіпервисокочастотної терапії та пристрій для його здійснення
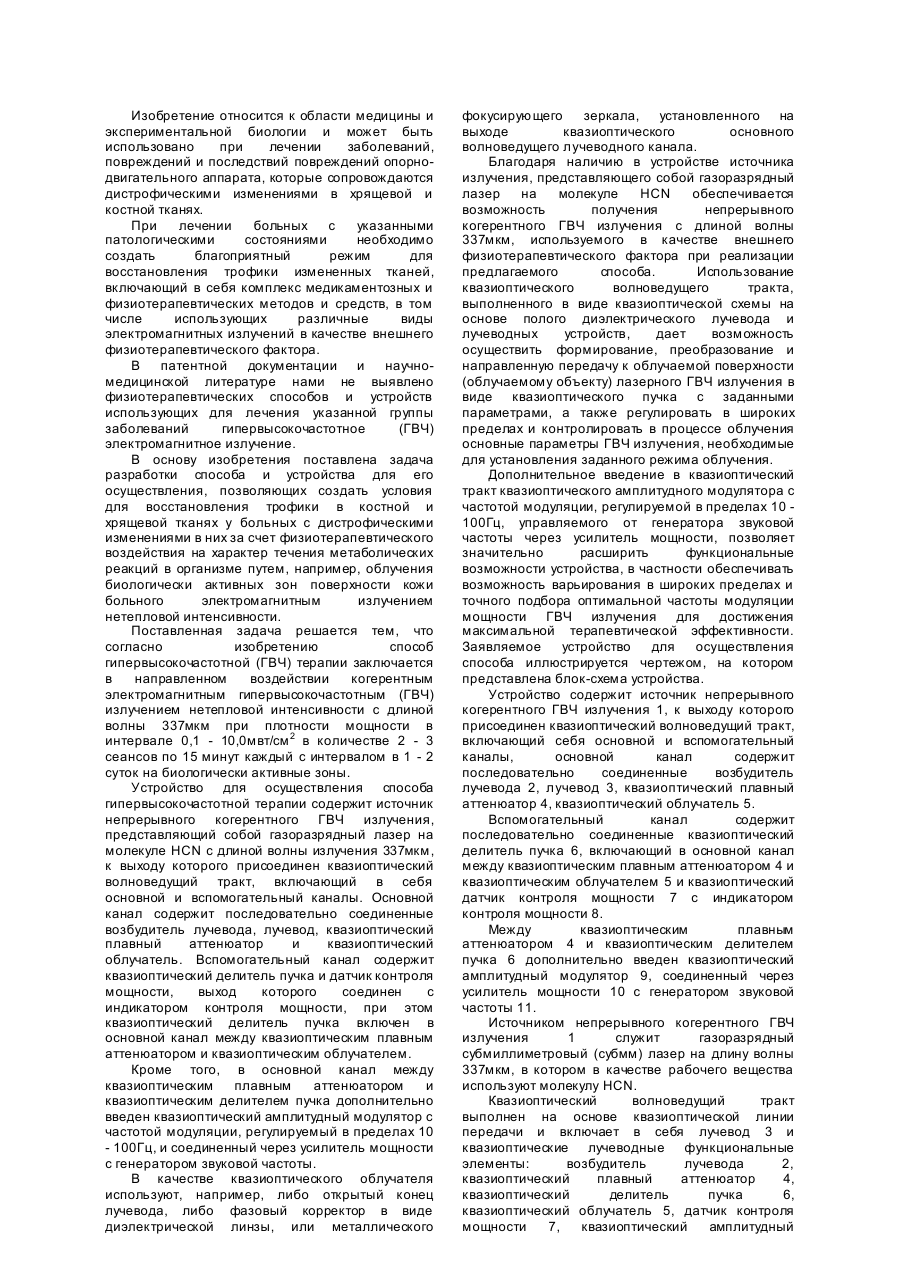
Номер патенту: 14732
Опубліковано: 04.02.1997
Автори: Кісельов Володимир Костянтинович, Кулєшов Євген Митрофанович, Маколінець Василь Іванович, Камєнєв Юрій Юхимович
Мітки: терапії, здійснення, гіпервисокочастотної, спосіб, пристрій
Формула / Реферат:
1. Способ гипервысокочастотной терапии заключающийся в том, что на биологически активные зоны, соответствующие области заболевания, воздействуют направленным когерентным электромагнитным гипервысокочастотным излучением нетепловой интенсивности с длиной волны 337 мкм при плотности мощности в интервале 0,1-1,0 ОмВт/см2 в количестве 2-3 сеансов по 15 минут каждый с интервалом в 1-2 суток.2. Устройство для осуществления способа,...
Спосіб електропунктурної діагностики і терапії живого організму самосюка і пристрій для його здійснення
Номер патенту: 41221
Опубліковано: 15.08.2001
Автори: Чухраєв Микола Вікторович, Самосюк Іван Захарович, Самосюк Наталія Іванівна, Чухраєва Олена Миколаївна
МПК: A61B 5/053, A61H 39/00
Мітки: терапії, електропунктурної, організму, живого, самосюка, пристрій, діагностики, здійснення, спосіб
Формула / Реферат:
1. Спосіб електропунктурної діагностики і терапії живого організму, який передбачає подачу тестуючого сигналу на біологічно-активну точку (БАТ), визначення електричних параметрів, згідно з якими оцінюють стан живого організму і здійснюють лікувальну дію, який відрізняється тим, що як тестуючий сигнал використовують частотно-модульований електричний сигнал, оцінку стану живого організму здійснюють шляхом кореляційно-екстремальної обробки...
Спосіб керування класіфікатором та пристрій для його здійснення
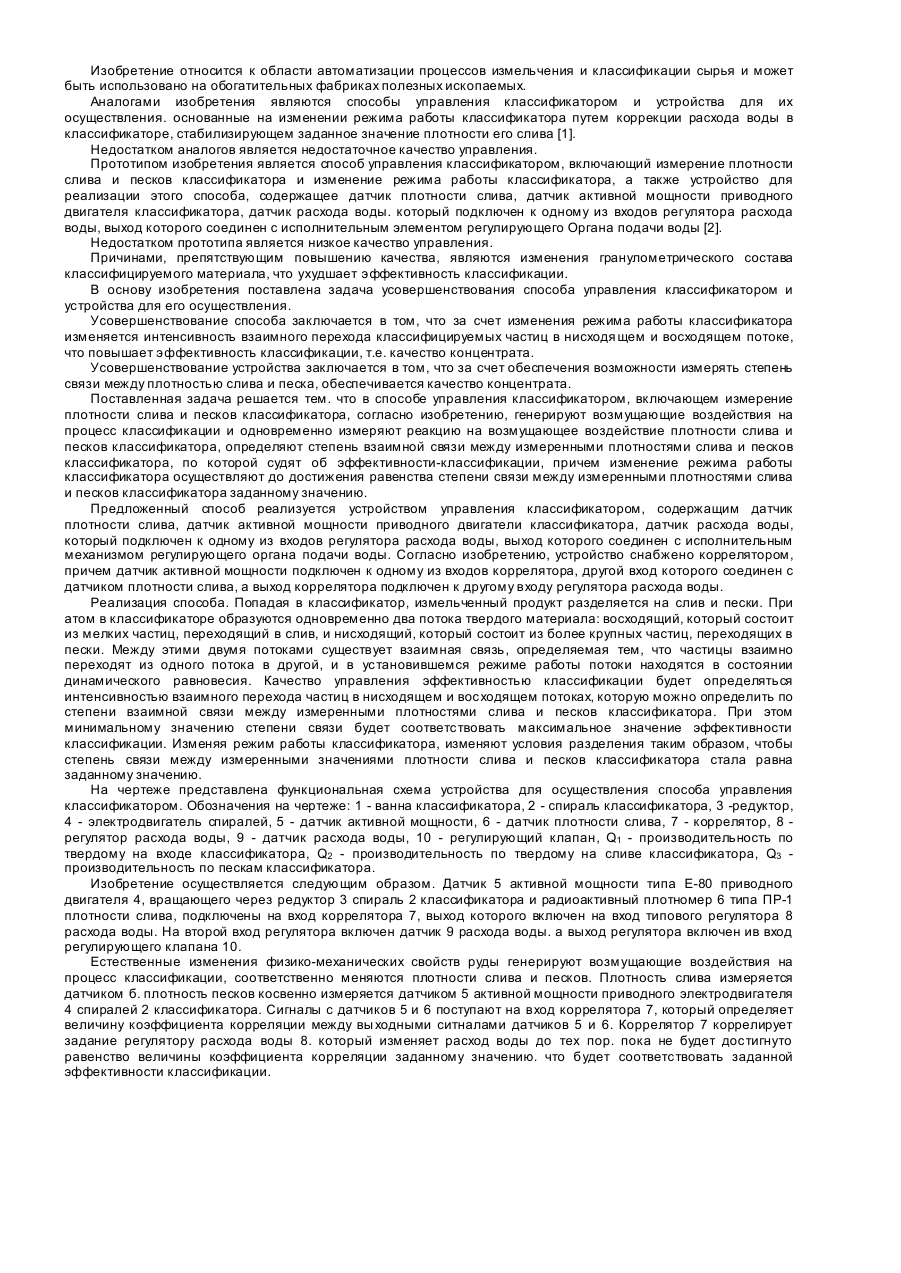
Номер патенту: 2117
Опубліковано: 26.12.1994
Автор: Кочура Євген Вітальйович
МПК: B02C 25/00
Мітки: пристрій, здійснення, спосіб, керування, класіфікатором
Формула / Реферат:
1. Способ управления классификатором, включающий измерение, плотности слива и песков классификатора и изменение режима работы классификатора, отличающийся тем, что генерируют возмущающие воздействия на процесс классификации и одновременно измеряют реакцию на возмущающее воздействие плотности слива и песков классификатора, определяют степень взаимной связи между измеренными плотностями слива и песков классификатора, по которой судят об...
Попередній патент: Спосіб діагностики систолічної дисфункції правого шлуночка серця
Наступний патент: Спосіб збереження сільськогосподарських тварин
Випадковий патент: Вітроенергетична установка з вітроколесом зі змінними осями