Спосіб визначення орієнтації осі візира та нашоломна система цілевказівки для його реалізації
Номер патенту: 47969
Опубліковано: 15.07.2002
Автори: Черняк Сергій Іванович, Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович
Формула / Реферат
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що визначають поточне значення одного пеленга на випромінюючий діод у момент проходження другого віялового оптичного променя через цей випромінюючий діод та визначення в той же момент другого пеленга, виміряють часові інтервали, один із яких є часовим інтервалом із моменту надходження першого імпульсу локації до появи другого імпульсу локації на один і той же випромінюючий діод, другий часовий інтервал - час від надходження другого імпульсу локації до появи першого імпульсу локації у другому періоді вимірювання, третій часовий інтервал - час між надходженнями двох імпульсів від одного і того ж випромінюючого діода та від одного і того ж скануючого блока за два періоди сканування, а потім визначають шукане значення пеленга при вирішенні рівняння
де bі - значення пеленга на випромінюючий діод у перший період сканування;
βі+1 - значення пеленга у другому періоді сканування,
t - час між двома імпульсами від одного і того ж випромінюючого діода за два періоди,
t1 - час між імпульсами сканування на один випромінюючий діод від першого та другого скануючих блоків,
t2 - час між імпульсами сканування від другого до першого скануючого блока,
β1(і+1) - шукане значення пеленга.
2. Нашоломна система целевказування, яка складається з трьох джерел випромінювання, розташованих на захисному шоломі, двох розташованих на об'єкті скануючих фотоприймальних блоків, пристрою визначення первинних кутів сканування, пристрою визначення осі візира й генератора тактових імпульсів, пристрій визначення первинних кутів сканування з'єднано з виходами скануючих фотоприймальних блоків, які оптично зв'язані з джерелами випромінювання, розташованими на захисному шоломі, та з виходом тактового генератора імпульсів, яка відрізняється тим, що в неї додатково введені блок формування прогнозованих імпульсів, що складаються з лічильників часових інтервалів, лічильні входи яких з'єднані з генератором тактових імпульсів, а керуючі входи - із пристроєм визначення первинних кутів сканування, причому виходи лічильників імпульсів приєднані до помножувально-ділильного пристрою, другі входи якого з'єднані з виходами регістрів збереження інформації, входи яких приєднані до пристрою визначення первинних кутів сканування, до виходів якого приєднано схему додавання, другий вхід якої з'єднано з помножувально-ділильним пристроєм, а вихід - із входом пристрою обчислення лінії візування.
Текст
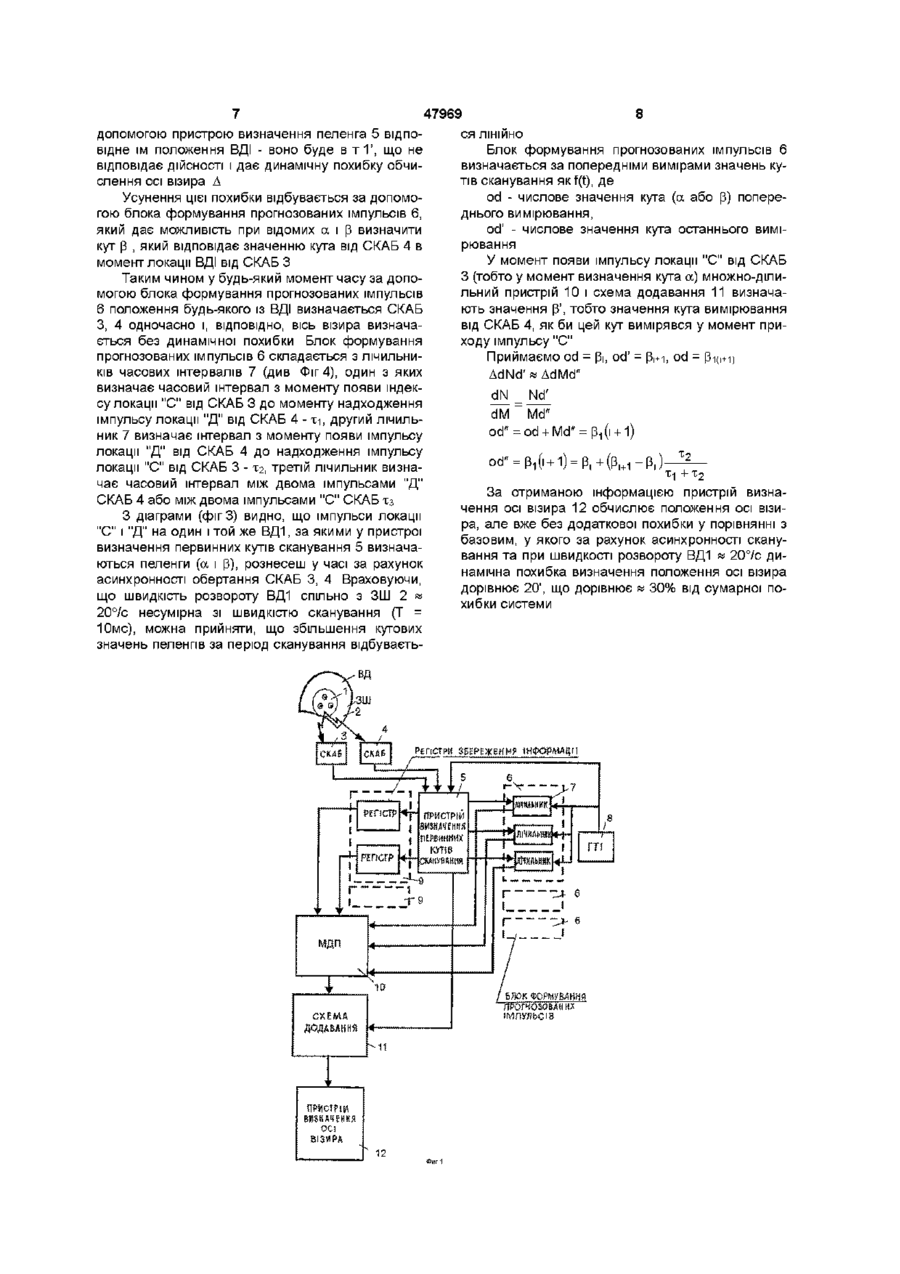
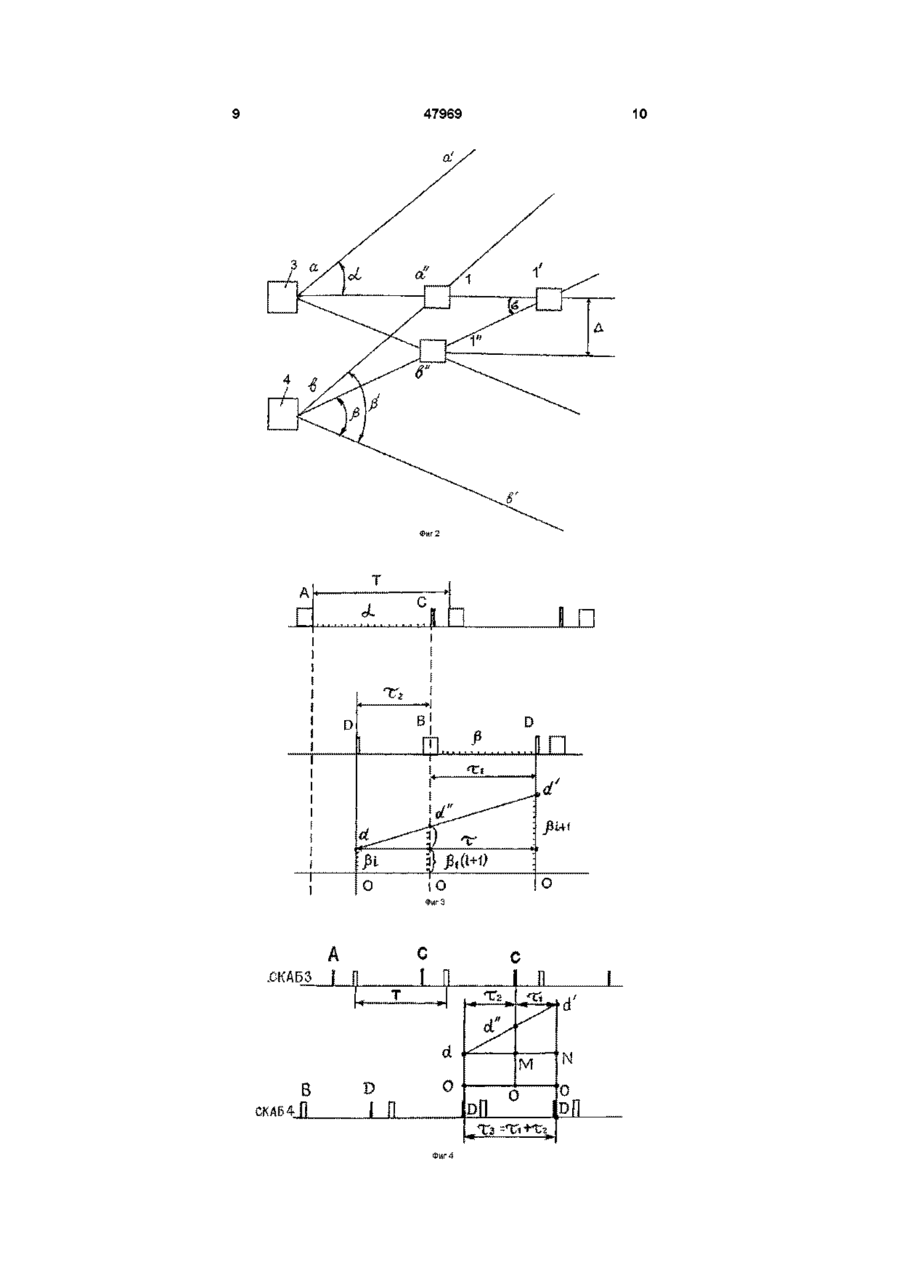
1 Спосіб визначення орієнтації осі візира, суть якого в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами плоскими віяловими оптичними променями, визначення первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначення орієнтації осі візира, який відрізняється тим, що визначають поточне значення одного пеленга на випромінюючий діод у момент проходження другого віялового оптичного променя через цей випромінюючий діод та визначення в той же момент другого пеленга, виміряють часові інтервали, один із яких є часовим інтервалом із моменту надходження першого імпульсу локації до появи другого імпульсу локації на один і той же випромінюючий діод, другий часовий інтервал - час від надходження другого імпульсу локації до появи першого імпульсу локації у другому періоді вимірювання, третій часовий інтервал - час між надходженнями двох імпульсів від одного і того ж випромінюючого діода та від одного і того ж скануючого блока за два періоди сканування, а потім визначають шукане значення пеленга при вирішенні рівняння де Рі - значення пеленга на випромінюючий діод у перший період сканування, рі+і - значення пеленга у другому періоді сканування, х - час між двома імпульсами від одного і того ж випромінюючого діода за два періоди, ті - час між імпульсами сканування на один випромінюючий діод від першого та другого скануючих блоків, Х2 - час між імпульсами сканування від другого до першого скануючого блока, рі(і+1) - шукане значення пеленга 2 Нашоломна система целевказівки, яка складається з трьох джерел випромінювання, розташованих на захисному шоломі, двох розташованих на об'єкті скануючих фотоприймальних блоків, пристрою визначення первинних кутів сканування, пристрою визначення осі візира й генератора тактових імпульсів, пристрій визначення первинних кутів сканування з'єднано з виходами скануючих фотоприймальних блоків, які оптично зв'язані з джерелами випромінювання, розташованими на захисному шоломі, та з виходом тактового генератора імпульсів, яка відрізняється тим, що в неї додатково введені блок формування прогнозованих імпульсів, що складаються з ЛІЧИЛЬНИКІВ часових інтервалів, ЛІЧИЛЬНІ входи яких з'єднані з генератором тактових імпульсів, а керуючі входи - із пристроєм визначення первинних кутів сканування, причому виходи ЛІЧИЛЬНИКІВ імпульсів приєднані до множно-ділильного пристрою, другі входи якого з'єднані з виходами регістрів збереження інформації, входи яких приєднані до пристрою визначення первинних кутів сканування, до виходів якого приєднано схему додавання, другий вхід якої з'єднано з множно-ділильним пристроєм, а вихід із входом пристрою обчислення лінії візування Винахід відноситься до оптико-механічних та оптико-електронних систем і може бути використаний в системах наведення, системах управління авіаційними комплексами Нам відомо спосіб визначення осі візира та нашоломна система цілевказівки для його реалізації, який полягає в тому , що за допомогою скануючих фотоприймальних блоків визначають кутове поло (О ження джерел випромінювання (первинних пеленгів) методом поелементної пеленгації Визначають площину у просторі, яка проходить через ці точки, і встановлюють до неї" перпендикуляр , який є колінеарним до лінії візування Дивись , наприклад, патенти США - №№ 3 678 823, 4 209 254, 3 375 375, 3 917 412,3 678 223, патенти Франції №№ 2 076 693,2 168 425 Нам ВІДОМІ оптико-електронні пристрої дистанційного визначення орієнтації нашоломного візира, виконані за схемою поелементної пеленгації джерел випромінювання (випромінюючих ДІОДІВ), розташованих на захисному шоломі і орієнтованих відносно осі візира, коли за сигналами купв-пеленпв, які визначаються скануючими фотоприймальними блоками, розраховується просторове положення джерел випромінювання, тобто кутове положення оптичної осі нашоломного візира Дивись, наприклад, патенти США №№ 3 678 823, 4 209 254, 3 375 375, 3 917 412, З 678 223, патенти Франції №№2 076 693,2 168 425 Недоліком відомих способів та пристроїв є низька точність визначення орієнтації осі візира через принцип, покладений у метод обробки, а також зчитування первинних пеленгів Найбільш близьким за технічною суттю до запропонованого способу є визначення орієнтації осі візира за патентом СІЛА №4 193 689 Спосіб полягає в тому , що за допомогою скануючих фотоприимальних блоків (СКАБ каналу А і СКАБ каналу Б) визначають положення випромінюючих ДІОДІВ у просторі по первинним кутам-пеленгам на кожний випромінюючий діод Визначають площину у просторі, яка проходить через точки випромінювання та визначають перпендикуляр до даної площини, який і є віссю візира Відома система, яка є прототипом за патентом США №4 193 689, включає нашоломний вузол, до складу якого входять випромінюючі діоди (ВД), скануючи блоки, які перетворюють оптичні сигнали від випромінюючих ДІОДІВ в електричні, блок визначення кодів пеленгів, який визначає значення первинних пеленгів на ВД (ои, аг, аз, Рі, Рг, Рз) У двійковому коді, обчислювальний пристрій, який визначає за значеннями первинних пеленгів положення лінії візування в системі координат об'єкта Вказана система має невисоку точність визначення положення лінії візування, яка складає 1 1,5°, і при жорстких вимогах до габаритно-вагових характеристик системи є граничною При розробці способу, що заявляється, визначення орієнтації осі візира і нашоломної системи цілевказівки для його реалізації стояло завдання підвищення точності системи за рахунок зменшення динамічної похибки визначення осі візира Для вирішення поставленої задачі у відомому способі визначення положення осі візира, в основу якого покладено сканування простору знаходження нашоломного вузла з випромінюючими діодами плоскими оптичними віяловими променями, визначення значень первинних пеленгів на кожний з випромінюючих ДІОДІВ на момент проходження через випромінюючі діоди віялових оптичних променів, визначення положення нашоломного вузла у просторі, визначення орієнтації осі візира, визначають поточне значення одного пеленга на випромінюю 47969 чий діод в момент проходження другого віялового оптичного променя через цей випромінюючий діод та визначення другого пеленга, виміряють часові інтервали , один з яких є часовим інтервалом з моменту надходження першого імпульсу локації до появи другого імпульсу локації на один і той же випромінюючий діод, другий часовий інтервал - час від надходження другого імпульсу локації до появи першого імпульсу локації у другому періоді вимірювання, третій часовий інтервал - час між надходженнями двох імпульсів від одного і того ж випромінюючого діода та від одного і того ж скануючого блока за два періоди сканування, а потім визначають шукане значення пеленга при вирішенні рівняння р,(р|+1р|) Х 1+Х2 де p., - значення пеленга на випромінюючий діод у перший період сканування, Рі+і - значення пеленга у другому періоді сканування, х - час між двома імпульсами від одного і того ж випромінюючого діода за два періоди, ті - час між імпульсами сканування на один випромінюючий діод від одного та другого скануючих блоків, Т2- час між імпульсами сканування від другого до першого скануючого блоку, Рці+1) - шукане значення пеленга Таким чином, у відомому нам способі, в основу якого покладено визначення положення осі візира за допомогою скануючих блоков, відбувається циклічне вимірювання (Тциклу = Юмс) первинних пеленгів і часових інтервалів ті - з моменту надходження імпульсу локації від першого СКАБ до моменту появи імпульсу локації на ВІДПОВІДНИЙ випромінюючий діод від другого СКАБ, Х2 - з моменту надходження імпульсу локації від другого СКАБ до появи імпульсу локації від першого СКАБ, х - з моменту надходження імпульсу локації від першого СКАБ у першому циклі до появи цього ж імпульсу у другому циклі За цією інформацією визначають поточне значення одного пеленга на випромінюючий діод в момент проходження другого віялового оптичного променя через цей випромінюючий діод, тобто в момент визначення другого пеленга Таким чином отримання інформації відбувається в одну і ту ж мить, тобто усувається динамічна похибка Ця похибка складає « 30% і закладена в асинхронному принципі отримання інформації про положення випромінюючих ДІОДІВ у просторі Скануючі блоки, які формують ВІЯЛОВІ пучки, сканують ними простір, в якому знаходиться нашоломний вузол (НВ), розташований на захисному шоломі (ЗШ) оператора Враховуючи, що привід кожного скануючого блока працює асинхронно, то віяловий пучок від кожного СКАБ проходить через елементи НВ в різні моменти часу Якщо НВ рухається під час реєстрації його положення, то інформація про положення НВ від одного і другого СКАБ буде відповідати точці у просторі, яка не відповідає дійсному положенню випромінюючого діода у 47969 нуючими фотоприймальними блоками (СКАБ) 3, 4 в момент проходження плоского віялового оптичного променя , який формується СКАБ 3, 4 Кожний СКАБ 3, 4 формує свій оптичний промінь і видає свій пеленг на систему випромінюючих ДІОДІВ 1 Система випромінюючих ДІОДІВ 1 встановлена таким чином, що їх просторове положення формує площину, перпендикуляр до якої колінеарний осі візира Пристрій визначення первинних кутів сканування 5 за даними від СКАБ 3, 4 визначає первинні кути сканування, блок формування прогнозованих імпульсів 6, який складається з трьох ЛІЧИЛЬНИКІВ часових інтервалів 7, що рахують тактові імпульси від генератора тактових імпульсів (ГТІ) 8, число тактових імпульсів дорівнює часовим інтервалам Поточне значення кодів пеленгів зберігається в регістрах збереження інформації 9, множчасових інтервалів, ЛІЧИЛЬНІ ВХОДИ ЯКИХ з'єднані з но-ділильний пристрій 10 та схема додавання 11 генератором тактових імпульсів, а керуючі входи визначають значення прогнозованих імпульсів, які з пристроєм визначення первинних кутів сканувандалі приймають участь в обчисленні осі візира у ня, причому виходи ЛІЧИЛЬНИКІВ імпульсів приєднапристрої обчислення осі візира 12 ні до множно-ділильного пристрою, другі входи Пристрій працює таким чином якого з'єднані з виходами регістрів збереження інСканування простору, в якому знаходиться вуформації, входи яких приєднані до пристрою визол з випромінюючими діодами 1, розташованими значення первинних кутів сканування, до виходів на захисному шоломі 2, здійснюється СКАБ 3, 4 , якого приєднана схема додавання , другий вхід які формують ВІЯЛОВІ плоскі оптичні промені, при якої з'єднано з множно-ділильним пристроєм, а випроходженні яких через випромінюючий діод (ВД) і хід - зі входом пристрою обчислення лінії візуванформується електричний імпульс наявності ВД 1 ня Крім того, в СКАБ 3,4 формуються опорні імпульси (імпульси початку відліку), ці та ІНШІ імпульси надТаким чином поставлена задача вирішується ходять до пристрою визначення первинних кутів за рахунок того, що у відомий пристрій, нашоломку сканування 5, в якому визначаються пеленги на всі систему цілевказівки, вводиться блок формування ВД1 прогнозованих імпульсів, який дозволить отримати інформацію про положення випромінюючих ДІОДІВ Пеленги - це КІЛЬКІСТЬ тактових імпульсів від нашоломного вузла від різних СКАБ в одну і ту ж генератора тактових імпульсів між появою опорномить часу і який складається із ЛІЧИЛЬНИКІВ часого імпульсу та імпульсу від ВД1, від СКАБ 3, 4 та вих інтервалів Також додатково введеш регістри кожного ВД1 це - ои, а,2, аз та Рі, Рг, Рз Отримана збереження інформації, множно-ділильний приінформація зберігається в регістрах збереження стрій, схеми додавання При цьому ЛІЧИЛЬНІ ВХОДИ інформації 9 ЛІЧИЛЬНИКІВ часових інтервалів з'єднані з генератоВраховуючи, що СКАБ 3, 4 працюють асинхром тактових імпульсів, а керуючі входи - з приронно, моменти появи опорних імпульсів від кожстроєм визначення первинних кутів сканування ного СКАБ 3, 4 мають свій певний час Виходи ЛІЧИЛЬНИКІВ часових інтервалів приєднані Розглянемо для пояснення принципу усунення до множно-ділильного пристрою (МДП) Другі входинамічної похибки просторове положення елемеди МДП з'єднані з виходами регістрів збереження нтів пристрою, представлене на фіг 2, де СКАБ З, інформації, входи яких приєднані до пристрою ви4, 1, 1' та 1" положення ВД1 в різні моменти часу значення первинних кутів сканування Виходи приа - а' і в - в' - лінії початку відліку СКАБ 3, 4 ВІДПОВІстрою первинних кутів сканування з'єднані зі схеДНО, ЛІНІЇ а - а" і в - в" - лінії локації ВД1, мою додавання, другий вхід якої з'єднано з МДП, а а, р - кутові значення положень ВД1 у просторі вихід - зі входом пристрою обчислення осі візира відносно СКАБ 3, 4, Перелік креслень Т - період сканування кожним СКАБ 37 4 На фіг 1 - представлено блок-схему пристрою, Розглянемо локацію одного ВД1 Якщо ВДІ що заявляється, нашоломної системи цілевказівзнаходиться в положенні І в момент проходження ки, через нього віялового оптичного пучка від СКАБ З, На фіг 2 - представлено просторове положенто кут між а - а" і в - в" буде дорівнювати а Припуня елементів пристрою, стимо, що в цей момент віяловий оптичний пучок На фіг 3, 4 - представлено часову діаграму ровід СКАБ 4 пройде тільки початок відліку, тобто боти запропонованого пристрою знаходиться на лінії в - в" і досягне ВДІ через t < Т Спосіб орієнтації осі візира, який заявляється, Враховуючи, що ВДІ пересувається зі швидкісвикладено при опису роботи заявленого пристрою тю < 207с, тому що відбувається супроводження нашоломної системи цілевказівки ЦІЛІ, що швидко рухається і яку необхідно постійно Пристрій, що заявляється, містить в собі сисвізувати, ВДІ на час візування його СКАБ 4 займе тему з трьох випромінюючих ДІОДІВ 1, розташовану положення І" Кутове положення ВДІ відносно на захисному шоломі 2 Діоди 1 з певною ПОСЛІДОСКАБ 4, (пеленг) буде р ВНІСТЮ випромінюють імпульси, які фіксуються скаЗа отриманими значеннями а і р знаходимо за просторі, тобто вісь візування буде обчислюватись з динамічною похибкою, яка складає 35 - 40% від сумарної похибки системи Поставлена задача в пристрої, що заявляється, виконується за рахунок введення у вже відому нашоломну систему цілевказівки, до складу якої входять три джерела випромінювання, розташованих на захисному шоломі, два розташовані на об'єкті скануючих фотоприймальних блока, пристрій визначення первинних кутів сканування, пристрій визначення осі візира і генератор тактових імпульсів, причому пристрій визначення первинних кутів сканування з'єднано з виходами скануючих фотоприймальних блоків, оптично зв'язаних з джерелами випромінювання, розташованими на захисному шоломі, і з виходом тактового генератора імпульсів, додатково введені блок формування прогнозованих імпульсів , який складається з ЛІЧИЛЬНИКІВ 8 47969 допомогою пристрою визначення пеленга 5 відповідне їм положення ВДІ - воно буде в т і ' , що не відповідає ДІЙСНОСТІ і дає динамічну похибку обчислення осі візира Д Усунення цієї похибки відбувається за допомогою блока формування прогнозованих імпульсів 6, який дає можливість при відомих а і р визначити кут р , який відповідає значенню кута від СКАБ 4 в момент локації ВДІ від СКАБ З Таким чином у будь-який момент часу за допомогою блока формування прогнозованих імпульсів 6 положення будь-якого із ВДІ визначається СКАБ З, 4 одночасно і, ВІДПОВІДНО, ВІСЬ візира визначається без динамічної похибки Блок формування прогнозованих імпульсів 6 складається з ЛІЧИЛЬНИКІВ часових інтервалів 7 (див Фіг 4), один з яких визначає часовий інтервал з моменту появи індексу локації "С" від СКАБ 3 до моменту надходження імпульсу локації "Д" від СКАБ 4 - хі, другий лічильник 7 визначає інтервал з моменту появи імпульсу локації "Д" від СКАБ 4 до надходження імпульсу локації "С" від СКАБ 3 -Х2, третій лічильник визначає часовий інтервал між двома імпульсами "Д" СКАБ 4 або між двома імпульсами "С" СКАБ хз З діаграми (фіг 3) видно, що імпульси локації "С" і "Д" на один і той же В Д 1 , за якими у пристрої визначення первинних кутів сканування 5 визначаються пеленги (а і р), рознесеш у часі за рахунок асинхронності обертання СКАБ 3, 4 Враховуючи, що швидкість розвороту ВД1 спільно з ЗШ 2 « 20°/с несумірна зі швидкістю сканування (Т = Юмс), можна прийняти, що збільшення кутових значень пеленгів за період сканування відбуваєть ся ЛІНІЙНО Блок формування прогнозованих імпульсів 6 визначається за попередніми вимірами значень кутів сканування якОД, де od - числове значення кута (а або р) попереднього вимірювання, od' - числове значення кута останнього вимірювання У момент появи імпульсу локації "С" від СКАБ З (тобто у момент визначення кута а) множно-ділильний пристрій 10 і схема додавання 11 визначають значення р', тобто значення кута вимірювання від СКАБ 4, як би цей кут вимірявся у момент приходу імпульсу "С" Приймаємо od = Pi, od' = р,+і, od = Рц.+і) AdNd'«AdMd" dN _ Nd' dM ~ Md" p,(p 12 p i X! + X 2 За отриманою інформацією пристрій визначення осі візира 12 обчислює положення осі візира, але вже без додаткової похибки у порівнянні з базовим, у якого за рахунок асинхронності сканування та при швидкості розвороту ВД1 « 207с динамічна похибка визначення положення осі візира дорівнює 20', що дорівнює « 30% від сумарної похибки системи РЕЖЄНН? ІНФОРМАЦІЇ ПРИСТРІЙ ВИЗНАЧЕННЯ ОСІ ВІЗИРА i + 1 47969 10 О A £КАБЗ ТГ2. -1Л a d О N О О 11 47969 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 12
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of tracker axis direction determination and over-helmet target indication system for its realization
Автори англійськоюCherniak Serhii Ivanovych
Назва патенту російськоюСпособ определения ориентации оси визира и нашлемная система целеуказания для его реализации
Автори російськоюЧерняк Сергей Иванович
МПК / Мітки
МПК: F41G 3/22
Мітки: спосіб, нашоломна, візира, визначення, цілевказівки, реалізації, орієнтації, система, осі
Код посилання
<a href="https://ua.patents.su/6-47969-sposib-viznachennya-oriehntaci-osi-vizira-ta-nasholomna-sistema-cilevkazivki-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення орієнтації осі візира та нашоломна система цілевказівки для його реалізації</a>
Пристрій визначення орієнтації осі візира
Номер патенту: 30190
Опубліковано: 15.11.2000
Автори: Черняк Сергій Іванович, Плита Олександр Андрійович, Бузанов Віктор Іванович, Беляєва Галина Григорівна, Полєжаєв Віктор Вікторович
МПК: G02B 23/00
Мітки: визначення, орієнтації, пристрій, осі, візира
Формула / Реферат:
Пристрій визначення орієнтації вісі візира, який містить в собі візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву і похилої напівпрозорої пластини, який відрізняється тим, що в його склад введені блок виміру параметрів розвороту, блок задання початку відліку, блок корекції, блок інтеграторів, косинусний перетворювач і пристрій поділу, а в візир введений...
Пристрій визначення орієнтації осі візира
Номер патенту: 30199
Опубліковано: 15.11.2000
Автори: Полєжаєв Віктор Вікторович, Беляєва Галина Григорівна, Плита Олександр Андрійович, Черняк Сергій Іванович
МПК: G02B 23/00
Мітки: орієнтації, візира, осі, визначення, пристрій
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву та нахиленої плоскопаралельної пластини, який відрізняється тим, що до нього введено блок вимірювання параметрів розвороту, блок завдання початку відліку, запам'ятовуючий пристрій, суматор та інтегратор, а до візиру додатково встановлено у фокальній поверхні...
Спосіб зміни орієнтації робочої області радіотелефону і радіотелефон для його реалізації
Номер патенту: 46599
Опубліковано: 15.05.2002
Автор: Гнатенко Віталій Іванович
МПК: H04B 1/38
Мітки: зміни, радіотелефону, реалізації, орієнтації, робочої, області, радіотелефон, спосіб
Формула / Реферат:
1. Спосіб зміни орієнтації робочої області радіотелефону, у якому дисплей і модуль символьної клавіатури виконані у вигляді окремих елементів, що полягає в зміні напрямку «верх-низ» зображення на дисплеї радіотелефону, який відрізняється тим, що, поряд зі зміною напрямку «верх-низ» зображення на дисплеї радіотелефону, виконують поворот символів на клавішах символьної клавіатури радіотелефону так, що напрямки «верх-низ» зображення на дисплеї і...
Система визначення орієнтації штучного супутника землі
Номер патенту: 21768
Опубліковано: 30.04.1998
Автори: Салтиков Юрій Дмитрович, П'ятак Ігор Авдійович
МПК: G01S 5/02, G01C 21/24
Мітки: супутника, система, орієнтації, штучного, землі, визначення
Формула / Реферат:
1. Система определения ориентации искусственного спутника Земли, состоящая из гироскопического блока измерителя угловой скорости спутника, вычислительного устройства и радиопеленгатора, включающего радиопеленгационный блок с антенной системой, отличающаяся тем, что в состав радиопеленгатора входят обзорное радиоприемное устройство и блок фиксации частоты принимаемого сигнала.2. Система определения ориентации, выполненная в...
Нашоломна бінокулярна індикаторна система
Номер патенту: 34642
Опубліковано: 15.03.2001
Автори: Шклярський Володимир Іванович, Гой Віталій Миколайович, Кондратов Петро Олександрович
МПК: G02B 6/43, G02B 5/08, H04N 5/74
Мітки: нашоломна, індикаторна, бінокулярна, система
Формула / Реферат:
Нашоломна бінокулярна індикаторна система, яка містить канал для правого ока. що складається з оптично спряжених першого проекційного кінескопа, першого об'єктива, першого поворотного дзеркала та канал для лівого ока, що складається з оптично спряжених другого проекційного кінескопа, другого об'єктива, другого поворотного дзеркала, а також блок керування, електрично зв'язаний із виводами проекційних кінескопів, яка відрізняється тим, що у...
Попередній патент: Спосіб верхньої продувки розплаву
Наступний патент: Компенсатор фурми
Випадковий патент: Спосіб теплової ізоляції колони насосно-компресорних труб і пристрій для його здійснення