Система визначення орієнтації штучного супутника землі
Номер патенту: 21768
Опубліковано: 30.04.1998
Формула / Реферат
1. Система определения ориентации искусственного спутника Земли, состоящая из гироскопического блока измерителя угловой скорости спутника, вычислительного устройства и радиопеленгатора, включающего радиопеленгационный блок с антенной системой, отличающаяся тем, что в состав радиопеленгатора входят обзорное радиоприемное устройство и блок фиксации частоты принимаемого сигнала.
2. Система определения ориентации, выполненная в соответствии с п. 1, отличающаяся тем, что в состав системы включается блок запоминания частоты принимаемого радиоизлучения и выдачи команды на принудительную настройку радиоприемного устройства, вход и выход которого подключены к обзорному радиоприемному устройству.
Текст
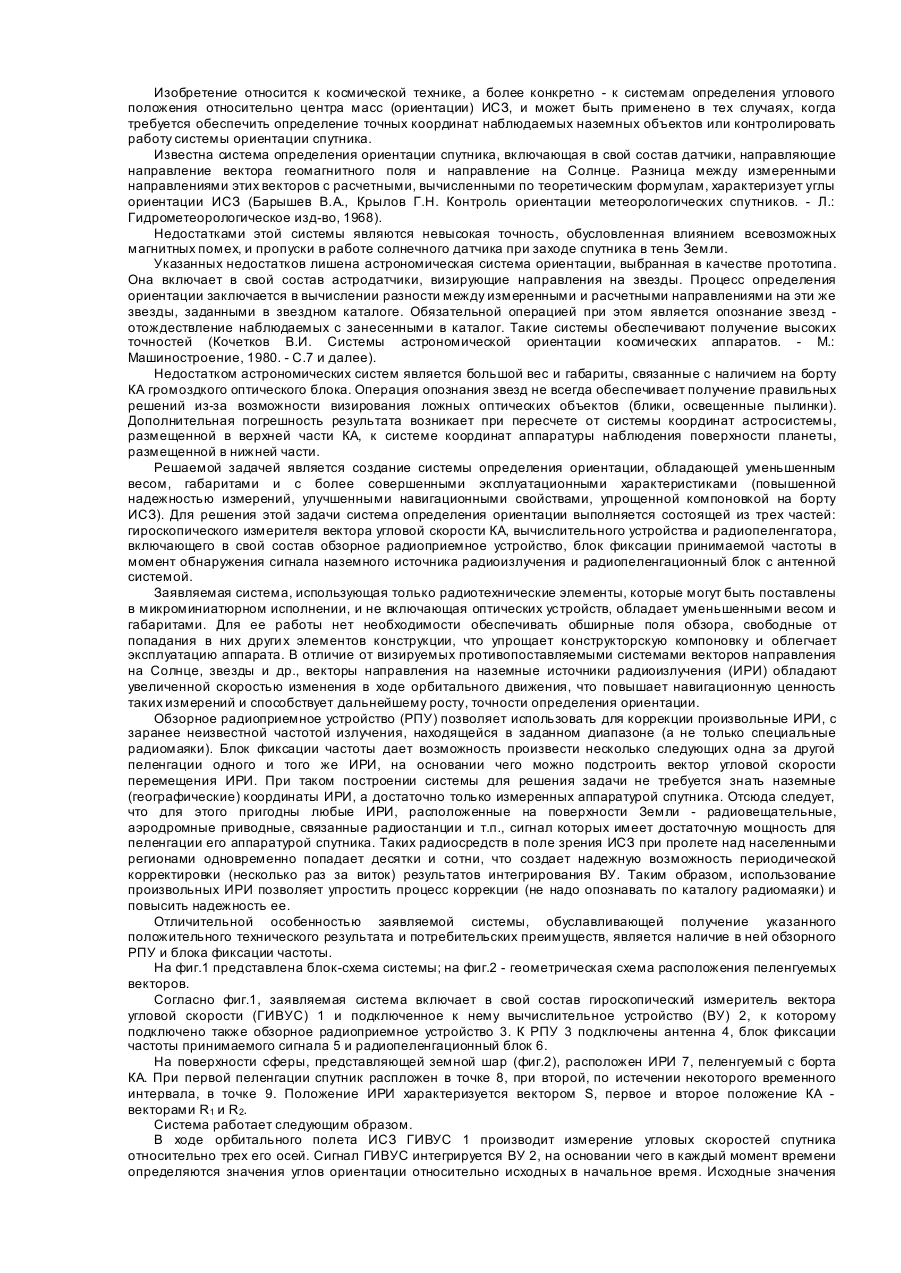
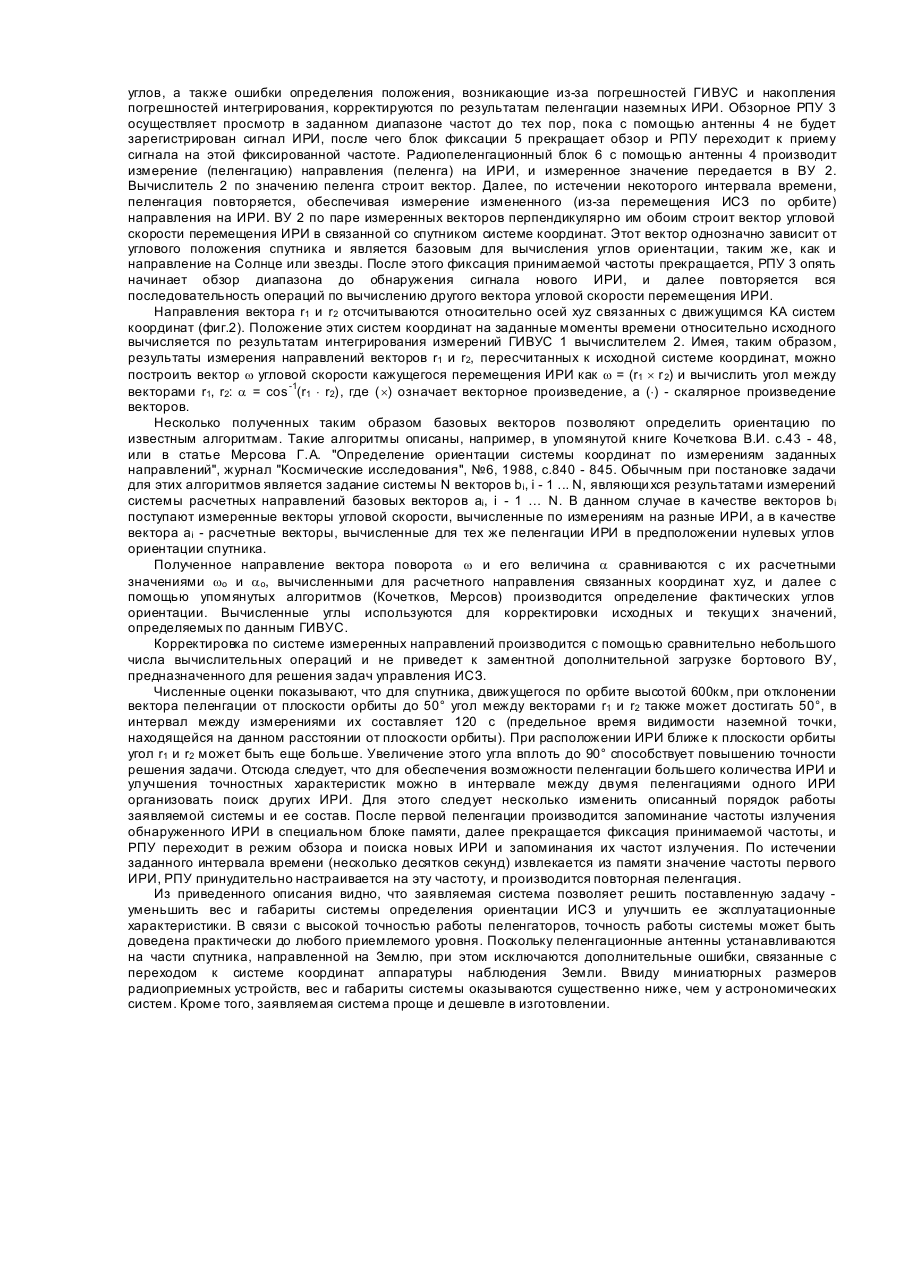
Изобретение относится к космической технике, а более конкретно - к системам определения углового положения относительно центра масс (ориентации) ИСЗ, и может быть применено в тех случаях, когда требуется обеспечить определение точных координат наблюдаемых наземных объектов или контролировать работу системы ориентации спутника. Известна система определения ориентации спутника, включающая в свой состав датчики, направляющие направление вектора геомагнитного поля и направление на Солнце. Разница между измеренными направлениями этих векторов с расчетными, вычисленными по теоретическим формулам, характеризует углы ориентации ИСЗ (Барышев В.А., Крылов Г.Н. Контроль ориентации метеорологических спутников. - Л.: Гидрометеорологическое изд-во, 1968). Недостатками этой системы являются невысокая точность, обусловленная влиянием всевозможных магнитных помех, и пропуски в работе солнечного датчика при заходе спутника в тень Земли. Указанных недостатков лишена астрономическая система ориентации, выбранная в качестве прототипа. Она включает в свой состав астродатчики, визирующие направления на звезды. Процесс определения ориентации заключается в вычислении разности между измеренными и расчетными направлениями на эти же звезды, заданными в звездном каталоге. Обязательной операцией при этом является опознание звезд отождествление наблюдаемых с занесенными в каталог. Такие системы обеспечивают получение высоких точностей (Кочетков В.И. Системы астрономической ориентации космических аппаратов. - М.: Машиностроение, 1980. - С.7 и далее). Недостатком астрономических систем является большой вес и габариты, связанные с наличием на борту КА громоздкого оптического блока. Операция опознания звезд не всегда обеспечивает получение правильных решений из-за возможности визирования ложных оптических объектов (блики, освещенные пылинки). Дополнительная погрешность результата возникает при пересчете от системы координат астросистемы, размещенной в верхней части КА, к системе координат аппаратуры наблюдения поверхности планеты, размещенной в нижней части. Решаемой задачей является создание системы определения ориентации, обладающей уменьшенным весом, габаритами и с более совершенными эксплуатационными характеристиками (повышенной надежностью измерений, улучшенными навигационными свойствами, упрощенной компоновкой на борту ИСЗ). Для решения этой задачи система определения ориентации выполняется состоящей из трех частей: гироскопического измерителя вектора угловой скорости КА, вычислительного устройства и радиопеленгатора, включающего в свой состав обзорное радиоприемное устройство, блок фиксации принимаемой частоты в момент обнаружения сигнала наземного источника радиоизлучения и радиопеленгационный блок с антенной системой. Заявляемая система, использующая только радиотехнические элементы, которые могут быть поставлены в микроминиатюрном исполнении, и не включающая оптических устройств, обладает уменьшенными весом и габаритами. Для ее работы нет необходимости обеспечивать обширные поля обзора, свободные от попадания в них други х элементов конструкции, что упрощает конструкторскую компоновку и облегчает эксплуатацию аппарата. В отличие от визируемых противопоставляемыми системами векторов направления на Солнце, звезды и др., векторы направления на наземные источники радиоизлучения (ИРИ) обладают увеличенной скоростью изменения в ходе орбитального движения, что повышает навигационную ценность таких измерений и способствует дальнейшему росту, точности определения ориентации. Обзорное радиоприемное устройство (РПУ) позволяет использовать для коррекции произвольные ИРИ, с заранее неизвестной частотой излучения, находящейся в заданном диапазоне (а не только специальные радиомаяки). Блок фиксации частоты дает возможность произвести несколько следующих одна за другой пеленгации одного и того же ИРИ, на основании чего можно подстроить вектор угловой скорости перемещения ИРИ. При таком построении системы для решения задачи не требуется знать наземные (географические) координаты ИРИ, а достаточно только измеренных аппаратурой спутника. Отсюда следует, что для этого пригодны любые ИРИ, расположенные на поверхности Земли - радиовещательные, аэродромные приводные, связанные радиостанции и т.п., сигнал которых имеет достаточную мощность для пеленгации его аппаратурой спутника. Таких радиосредств в поле зрения ИСЗ при пролете над населенными регионами одновременно попадает десятки и сотни, что создает надежную возможность периодической корректировки (несколько раз за виток) результатов интегрирования ВУ. Таким образом, использование произвольных ИРИ позволяет упростить процесс коррекции (не надо опознавать по каталогу радиомаяки) и повысить надежность ее. Отличительной особенностью заявляемой системы, обуславливающей получение указанного положительного технического результата и потребительских преимуществ, является наличие в ней обзорного РПУ и блока фиксации частоты. На фиг.1 представлена блок-схема системы; на фиг.2 - геометрическая схема расположения пеленгуемых векторов. Согласно фиг.1, заявляемая система включает в свой состав гироскопический измеритель вектора угловой скорости (ГИВУС) 1 и подключенное к нему вычислительное устройство (ВУ) 2, к которому подключено также обзорное радиоприемное устройство 3. К РПУ 3 подключены антенна 4, блок фиксации частоты принимаемого сигнала 5 и радиопеленгационный блок 6. На поверхности сферы, представляющей земной шар (фиг.2), расположен ИРИ 7, пеленгуемый с борта КА. При первой пеленгации спутник распложен в точке 8, при второй, по истечении некоторого временного интервала, в точке 9. Положение ИРИ характеризуется вектором S, первое и второе положение КА векторами R1 и R2. Система работает следующим образом. В ходе орбитального полета ИСЗ ГИВУС 1 производит измерение угловых скоростей спутника относительно трех его осей. Сигнал ГИВУС интегрируется ВУ 2, на основании чего в каждый момент времени определяются значения углов ориентации относительно исходных в начальное время. Исходные значения углов, а также ошибки определения положения, возникающие из-за погрешностей ГИВУС и накопления погрешностей интегрирования, корректируются по результатам пеленгации наземных ИРИ. Обзорное РПУ 3 осуществляет просмотр в заданном диапазоне частот до тех пор, пока с помощью антенны 4 не будет зарегистрирован сигнал ИРИ, после чего блок фиксации 5 прекращает обзор и РПУ переходит к приему сигнала на этой фиксированной частоте. Радиопеленгационный блок 6 с помощью антенны 4 производит измерение (пеленгацию) направления (пеленга) на ИРИ, и измеренное значение передается в ВУ 2. Вычислитель 2 по значению пеленга строит вектор. Далее, по истечении некоторого интервала времени, пеленгация повторяется, обеспечивая измерение измененного (из-за перемещения ИСЗ по орбите) направления на ИРИ. ВУ 2 по паре измеренных векторов перпендикулярно им обоим строит вектор угловой скорости перемещения ИРИ в связанной со спутником системе координат. Этот вектор однозначно зависит от углового положения спутника и является базовым для вычисления углов ориентации, таким же, как и направление на Солнце или звезды. После этого фиксация принимаемой частоты прекращается, РПУ 3 опять начинает обзор диапазона до обнаружения сигнала нового ИРИ, и далее повторяется вся последовательность операций по вычислению другого вектора угловой скорости перемещения ИРИ. Направления вектора r1 и r2 отсчитываются относительно осей xyz связанных с движущимся KA систем координат (фиг.2). Положение этих систем координат на заданные моменты времени относительно исходного вычисляется по результатам интегрирования измерений ГИВУС 1 вычислителем 2. Имея, таким образом, результаты измерения направлений векторов r1 и r2, пересчитанных к исходной системе координат, можно построить вектор w угловой скорости кажущегося перемещения ИРИ как w = (r1 ´ r 2) и вычислить угол между векторами r1, r2: a = cos -1(r1 × r2), где (´) означает векторное произведение, а (×) - скалярное произведение векторов. Несколько полученных таким образом базовых векторов позволяют определить ориентацию по известным алгоритмам. Такие алгоритмы описаны, например, в упомянутой книге Кочеткова В.И. с.43 - 48, или в статье Мерсова Г.А. "Определение ориентации системы координат по измерениям заданных направлений", журнал "Космические исследования", №6, 1988, с.840 - 845. Обычным при постановке задачи для этих алгоритмов является задание системы N векторов bi, i - 1 ... N, являющи хся результатами измерений системы расчетных направлений базовых векторов ai, i - 1 … N. В данном случае в качестве векторов bi поступают измеренные векторы угловой скорости, вычисленные по измерениям на разные ИРИ, а в качестве вектора ai - расчетные векторы, вычисленные для тех же пеленгации ИРИ в предположении нулевых углов ориентации спутника. Полученное направление вектора поворота w и его величина a сравниваются с их расчетными значениями wo и a o, вычисленными для расчетного направления связанных координат xyz, и далее с помощью упомянутых алгоритмов (Кочетков, Мерсов) производится определение фактических углов ориентации. Вычисленные углы используются для корректировки исходных и текущи х значений, определяемых по данным ГИВУС. Корректировка по системе измеренных направлений производится с помощью сравнительно небольшого числа вычислительных операций и не приведет к заментной дополнительной загрузке бортового ВУ, предназначенного для решения задач управления ИСЗ. Численные оценки показывают, что для спутника, движущегося по орбите высотой 600км, при отклонении вектора пеленгации от плоскости орбиты до 50° угол между векторами r1 и r2 также может достигать 50°, в интервал между измерениями их составляет 120 с (предельное время видимости наземной точки, находящейся на данном расстоянии от плоскости орбиты). При расположении ИРИ ближе к плоскости орбиты угол r1 и r2 может быть еще больше. Увеличение этого угла вплоть до 90° способствует повышению точности решения задачи. Отсюда следует, что для обеспечения возможности пеленгации большего количества ИРИ и улучшения точностных характеристик можно в интервале между двумя пеленгациями одного ИРИ организовать поиск других ИРИ. Для этого следует несколько изменить описанный порядок работы заявляемой системы и ее состав. После первой пеленгации производится запоминание частоты излучения обнаруженного ИРИ в специальном блоке памяти, далее прекращается фиксация принимаемой частоты, и РПУ переходит в режим обзора и поиска новых ИРИ и запоминания их частот излучения. По истечении заданного интервала времени (несколько десятков секунд) извлекается из памяти значение частоты первого ИРИ, РПУ принудительно настраивается на эту частоту, и производится повторная пеленгация. Из приведенного описания видно, что заявляемая система позволяет решить поставленную задачу уменьшить вес и габариты системы определения ориентации ИСЗ и улучшить ее эксплуатационные характеристики. В связи с высокой точностью работы пеленгаторов, точность работы системы может быть доведена практически до любого приемлемого уровня. Поскольку пеленгационные антенны устанавливаются на части спутника, направленной на Землю, при этом исключаются дополнительные ошибки, связанные с переходом к системе координат аппаратуры наблюдения Земли. Ввиду миниатюрных размеров радиоприемных устройств, вес и габариты системы оказываются существенно ниже, чем у астрономических систем. Кроме того, заявляемая система проще и дешевле в изготовлении.
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for determination of orientation of artificial satellite of earth
Автори англійськоюPiatak Ihor Avdiiovych, Saltykov Yurii Dmytrovych
Назва патенту російськоюСистема определения ориентации искусственного спутника земли
Автори російськоюПятак Игорь Авдеевич, Салтыков Юрий Дмитриевич
МПК / Мітки
МПК: G01C 21/24, G01S 5/02
Мітки: землі, штучного, система, супутника, визначення, орієнтації
Код посилання
<a href="https://ua.patents.su/3-21768-sistema-viznachennya-oriehntaci-shtuchnogo-suputnika-zemli.html" target="_blank" rel="follow" title="База патентів України">Система визначення орієнтації штучного супутника землі</a>
Пристрій для визначення відносної кутової швидкості при коливальному процесі управління орієнтацією космічного апарата
Номер патенту: 10788
Опубліковано: 25.12.1996
Автори: Павловський Михайло Антонович, Анупрієнко Генадій Єфремович, Карпачов Юрій Андрійович
МПК: B64G 1/24
Мітки: управління, відносної, швидкості, процесі, кутової, пристрій, апарата, орієнтацією, коливальному, визначення, космічного
Формула / Реферат:
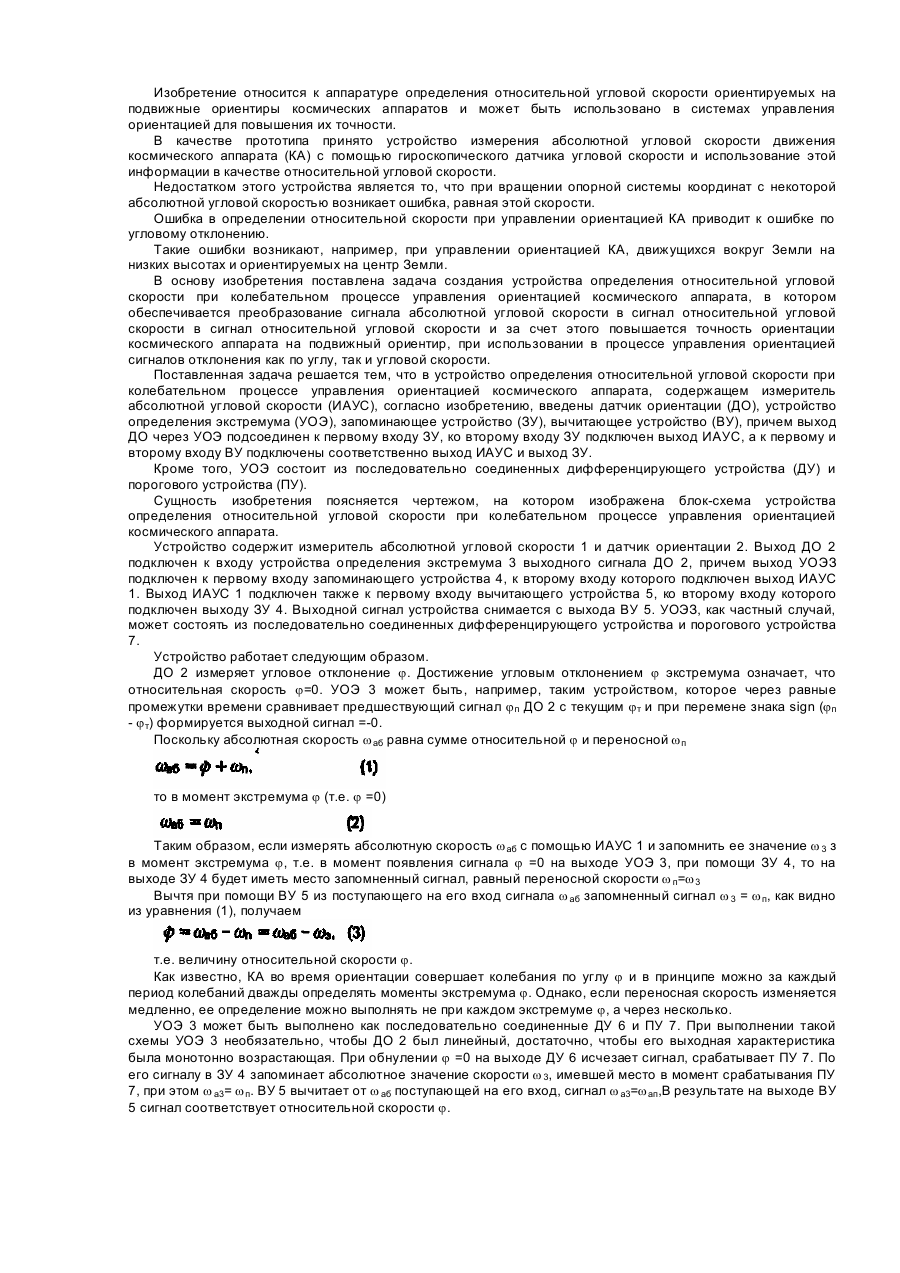
1. Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее измеритель абсолютной угловой скорости, отличающееся тем, что введены датчик ориентации, устройство определения экстремума, запоминающее устройство и вычитающее устройство, причем выход датчика ориентации через устройство определения экстремума подсоединен к первому входу запоминающего устройства,...
Спосіб визначення орієнтації осі легкого намагнічування в магнітооптичних плівках з площинною анізотропією
Номер патенту: 20302
Опубліковано: 15.07.1997
Автори: Грошенко Микола Олександрович, Вілесов Юрій Федотович, Вишневський Віктор Георгійович, Недвига Олександр Степанович, Прокопов Анатолій Романович, Дубінко Сергій Володимирович, Кудряшов Олександр Леонідович
МПК: G02F 1/01
Мітки: магнітооптичних, плівках, осі, визначення, легкого, площинною, спосіб, намагнічування, анізотропією, орієнтації
Формула / Реферат:
Способ определения ориентации оси легкого намагничивания в магнитооптических пленках с плоскостной анизотропией, заключающийся в воздействии на магнитооптическую пленку полями рассеяния магнитной ленты с сигналограммой для наведения в пленке структуры намагниченности, аналогичной сигналограмме на магнитной ленте, освещении пленки поляризованным лазерным светом под углом полного внутреннего отражения для получения дифракции света на...
Спосіб спостереження землі з космосу
Номер патенту: 17366
Опубліковано: 15.04.1997
Автори: Драновський Володимир Йосипович, Уруський Олег Семенович, Зубко Віктор Петрович, Бушуев Евген Іванович, Салтиков Юрій Дмитрович
МПК: H04N 7/00
Мітки: спостереження, землі, спосіб, космосу
Формула / Реферат:
1. Способ наблюдения Земли из космоса, включающий прогнозирование движения спутника, формирование программы съемки и передачу ее в Центр управления полетом, формирование и закладку на борт временной программы работы спутника, передачу целеуказаний приемным земным станциям, наведение съемочной аппаратуры и бортовых передающих антенн, съемку и передачу информации на приемные земные станции, прием полученной со спутника информации, ее обработку...
Спосіб визначення відносної кутової швидкості під час коливального процесу керування орієнтаціею об’єкту на рухомий орієнтир
Номер патенту: 3990
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: орієнтир, кутової, коливального, рухомий, швидкості, відносної, об'єкту, орієнтаціею, керування, визначення, процесу, спосіб
Формула / Реферат:
1. Способ определения относительной угловой скорости при колебательном процессе управления ориентацией объекта на подвижным ориентир, включающий измерение углового отклонения ориентируемой оси от направления на ориентир, приложение к ориентируемому объекту управляющего воздействия, сформированного в функции измеренного отклонения, при помощи электромаховичных двигателей (ЭМД), измерение скорости вращения маховиков ЭМД, отличающийся тем, что...
Система визначення місцеположення і ідентифікації рухомих об’єктів, обладнаних радіодатчиком
Номер патенту: 20426
Опубліковано: 15.07.1997
Автори: Сирма Олексій Олексійович, Литвиненко Валентин Іванович, Мєдвєдєв Сергій Леонідович, Грішін Леонід Андрійович, Баскаков Юрій Георгійович, Лігінов Сергій Михайлович, Гудзюк Василь Петрович, Мальцев Вадим Олександрович, Муратов Олександр Олексійович
Мітки: визначення, об'єктів, рухомих, радіодатчиком, система, ідентифікації, обладнаних, місцеположення
Формула / Реферат:
Система определения местоположения и идентификации подвижных объектов, оборудованных радиодатчиком, содержащая N пространственно разнесенных постов пеленгования с известными координатами, причем N больше или равно 3, и центральный пост с известными координатами, причем каждый радиодатчик подвижных объектов включает датчик дверей, вибродатчик, выходы которых подключены к входам устройства сопряжения, устроиство управления, один вход...
Попередній патент: Машина для миття рослинної сировини
Наступний патент: Спосіб виготовлення порошкових залізографітових виробів
Випадковий патент: Спосіб одержання вірусоінактивованої фракції, що містить фактор yiii, та фракція, що містить фактор yiii