Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ла
Номер патенту: 51041
Опубліковано: 25.06.2010
Автори: Клівець Сергій Іванович, Закіров Замір Забірович, Сідченко Сергій Олександрович, Костенко Ігор Леонідович, Васильєв Дмитро Геннадійович, Воробйов Руслан Володимирович, Рисований Олександр Миколайович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Челпанов Артем Володимирович
Формула / Реферат
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, детектори, фільтри, формувачі імпульсів, тригери ("1"|"0"), схеми "і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, підсилювачі (фільтри) сигналу похибки, виконуючі механізми, електронно-цифрову обчислювальну машину та а - введення опорного сигналу з частотою Δvм передавального лазера, б - введення сигналу від каналу оцінки тангенціальної складової швидкості (кутових швидкостей) літального апарата (ЛА) для уточнення похибки збігу по кутах, який відрізняється тим, що після Лн додатково введено модифікований селектор подовжніх мод, а також введено модифікований інформаційний блок для інформаційного взаємозв'язку з ЛА та, в разі необхідності, формування і обробки його зображення.
Текст
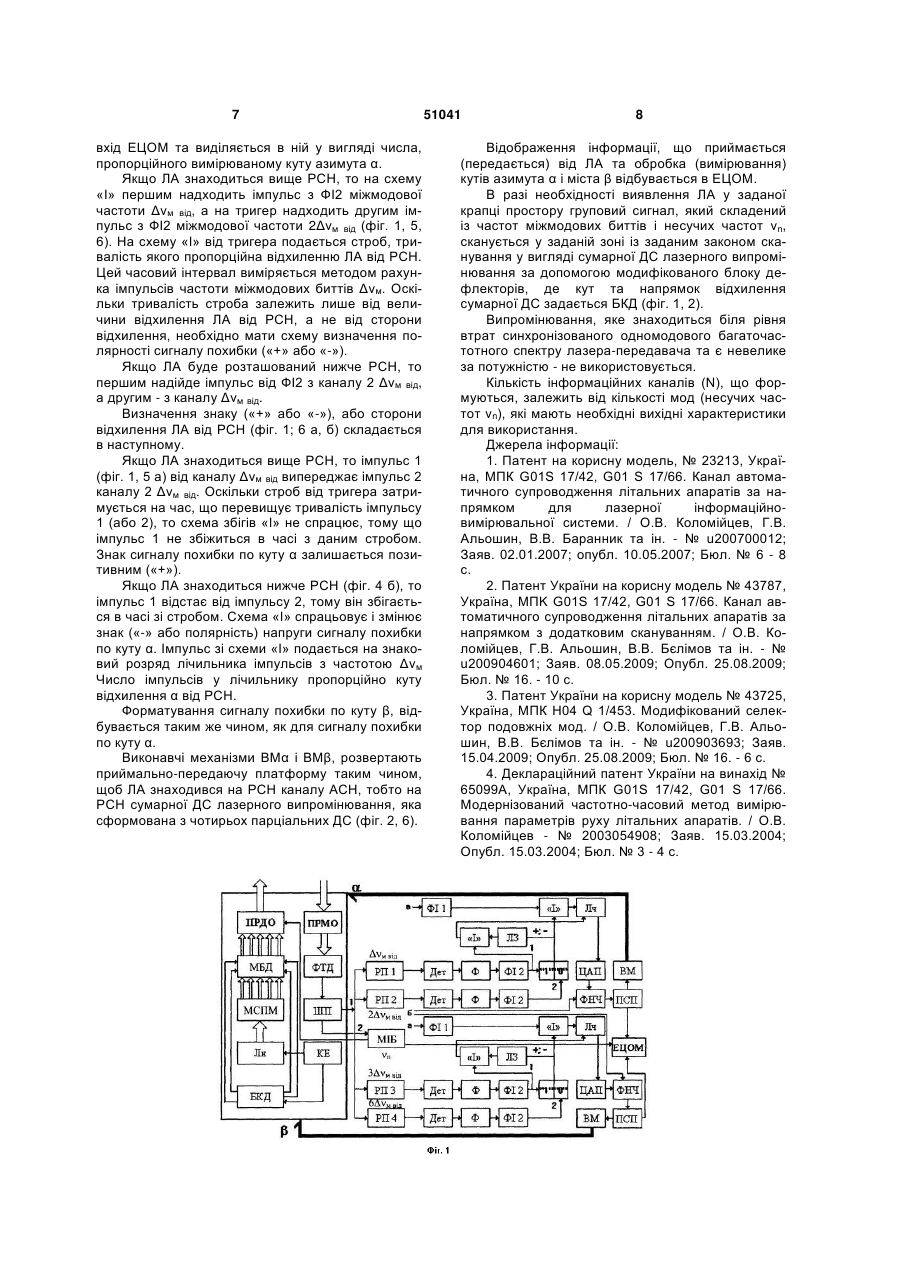
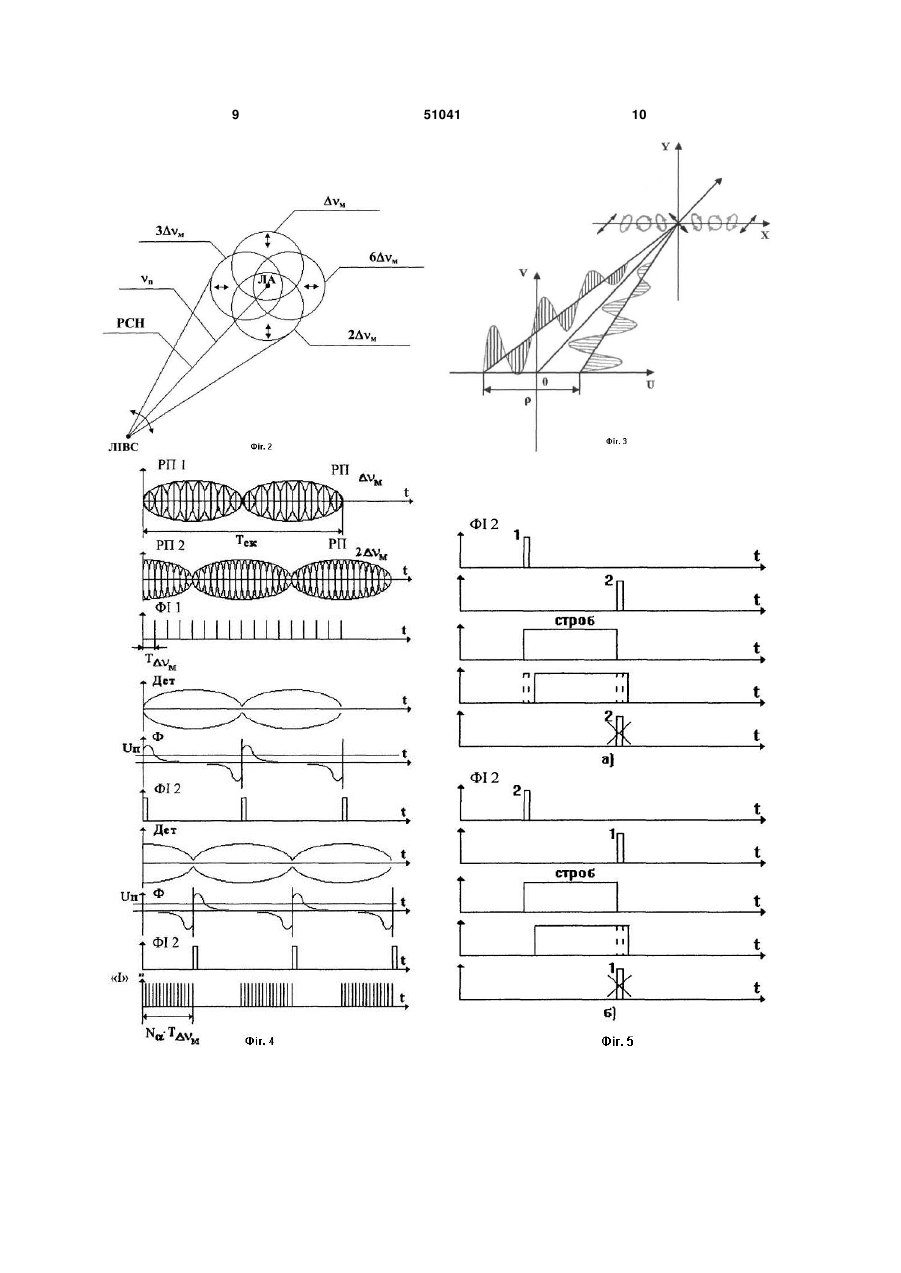
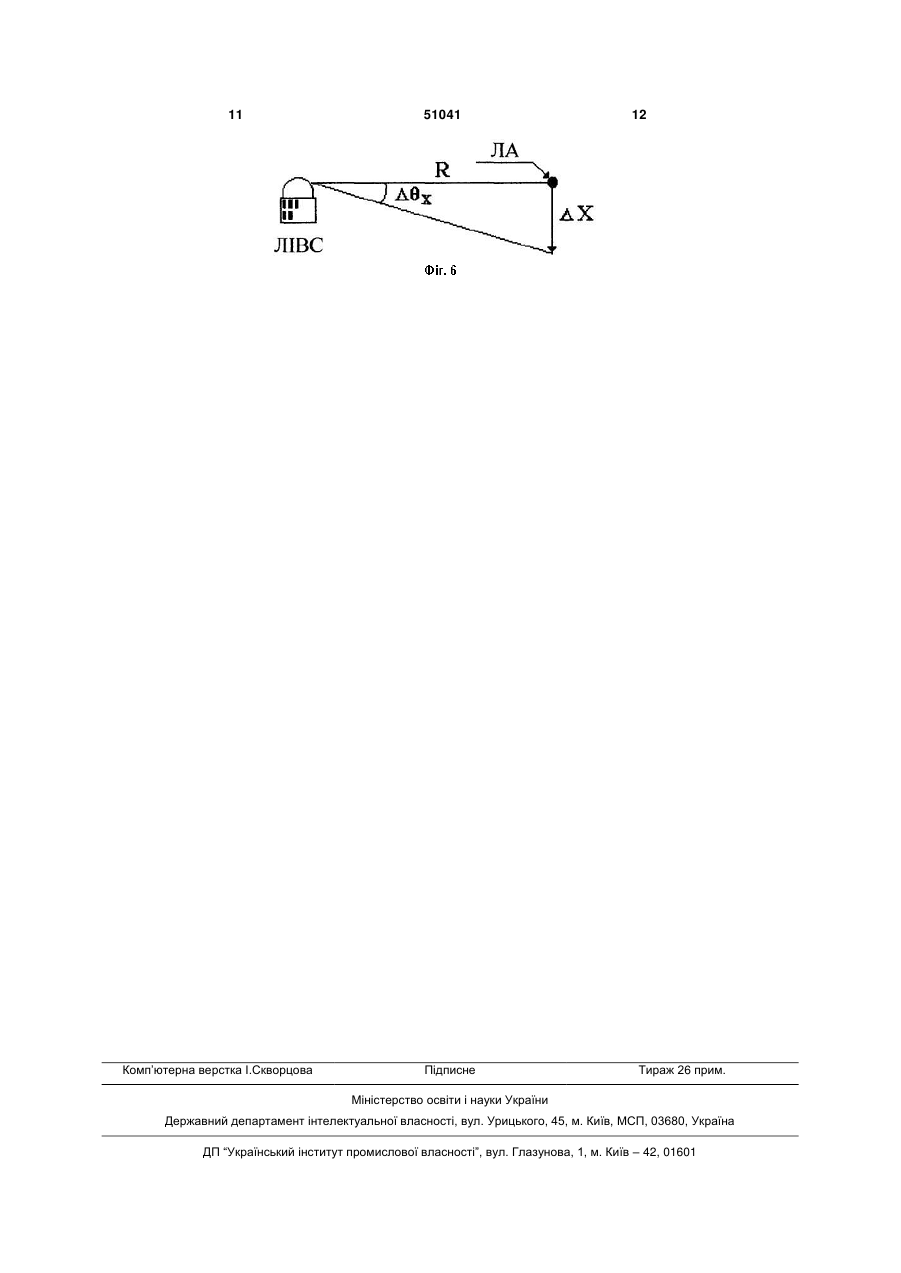
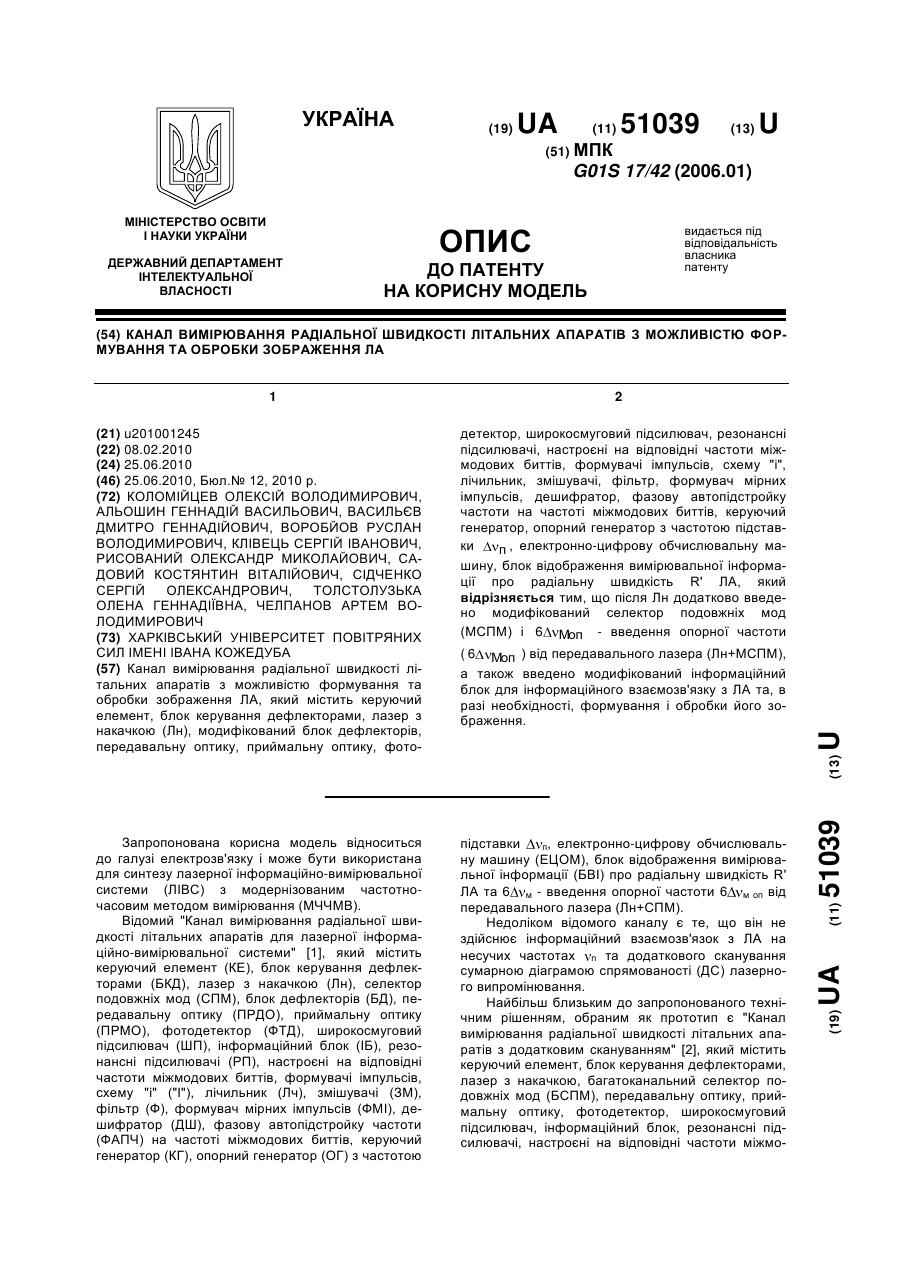
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), модифікований блок дефлекторів, передавальну оптику, приймальну оп U 1 3 дні частоти міжмодових биттів, детектори, фільтри, формувачі імпульсів, тригери („1"|„0"), схеми „і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, підсилювачі (фільтри) сигналу похибки, виконуючі механізми, електронно-цифрову обчислювальну машину та а - введення опорного сигналу з частотою Δvм передавального лазера, б - введення сигналу від каналу оцінки тангенціальної складової швидкості (кутових швидкостей) ЛА для уточнення похибки збігу по кутах, інформаційний блок для інформаційного взаємозв'язку з ЛА. Недоліком каналу-прототипу є те, що він не може формувати та обробляти зображення ЛА. В основу корисної моделі поставлена задача створити канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА, який дозволить виявляти ЛА та одночасно при стійкому його кутовому автосупроводженні з високою точністю вимірювати кути азимута α і міста β у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, здійснювати багатоканальний (N) інформаційний взаємозв'язок з ЛА тільки на несучих частотах vn, та в разі необхідності, формувати і обробляти його зображення. Поставлена задача вирішується за рахунок того, що у відомий канал-прототип [2], який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, багатоканальний селектор подовжніх мод, модифікований блок дефлекторів, передаючу оптику, приймаючу оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, детектори, фільтри, формувачі імпульсів, тригери („1"|„0"), схеми „і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, підсилювачі (фільтри) сигналу похибки, виконуючі механізми, електронноцифрову обчислювальну машину та а - введення опорного сигналу з частотою Δvм передавального лазера, б - введення сигналу від каналу оцінки тангенціальної складової швидкості (кутових швидкостей) ЛА для уточнення похибки збігу по кутах, інформаційний блок для інформаційного взаємозв'язку з ЛА замість БСПМ введено модифікований селектор подовжніх мод (МСПМ) [3] та замість ІБ введено модифікований інформаційний блок (МІБ) для інформаційного взаємозв'язку з ЛА, та в разі необхідності, формуванні і обробки його зображення. Побудова каналу автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА пов'язана з використанням МЧЧМВ [4] та синхронізованого одномодового богаточастотного випромінювання єдиного лазера-передавача. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у виявленні та при одночасному стійкому кутовому авто-супроводженні ЛА вимірюванні з високою точністю кутів азимута і міста у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, створенні багатоканального (N) інформаційного взаємозв'язку з ЛА на несучих час 51041 4 тотах vn, та в разі необхідності, формуванні і обробки його зображення. На фіг. 1 приведена узагальнена структурна схема запропонованого каналу АСН, де: а - введення опорного сигналу з частотою Δvм (3Δvм) лазера-передавача; б - введення сигналу від каналу оцінки тангенціальної складової швидкості (кутових швидкостей α' і β') ЛА для уточнення похибки збігу по кутах каналів. На фіг. 2 приведено створення рівносигнального напрямку (РСН) та сканування сумарною ДС лазерного випромінювання у невеликому куті і окремо 4-ма діаграмами спрямованості в ортогональних площинах. На фіг. 3 приведено створення лазерного сигналу із просторовою модуляцією поляризації. На фіг. 4 приведені епюри напруг з виходів блоків каналу АСН. На фіг. 5 приведені епюри напруг з виходів блоків каналу АСН, які визначають полярність, де: а) - для визначення знаку «+»; б) - для визначення знаку «-». На фіг. 6 приведено кут відхилення ЛА від РСН відносно ЛІВС. Запропонований канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, модифікований блок дефлекторів, передаючу оптику, приймаючу оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, детектори, фільтри, формувачі імпульсів, тригери („1"|„0"), схеми „і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, підсилювачі (фільтри) сигналу похибки, виконуючі механізми, електронноцифрову обчислювальну машину та а - введення опорного сигналу з частотою Δvм передавального лазера, б - введення сигналу від каналу оцінки тангенціальної складової швидкості (кутових швидкостей) ЛА для уточнення похибки збігу по кутах, модифікований інформаційний блок для інформаційного взаємозв'язку з ЛА, та в разі необхідності, формуванні і обробки його зображення. Робота запропонованого каналу автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА полягає в наступному. Із синхронізованого одномодового багаточастотного спектра випромінювання YAG:Nd3+ - лазера (або лазера з найбільш кращими показниками) (Лн) за допомогою МСПМ виділяються необхідні пари частот і окремі частоти для створення: - багатоканального (N) інформаційного зв'язку та лазерного сигналу із просторовою модуляцією поляризації, за умовою використання сигналу з подовжніх мод (несучих частот vn); - рівносигнального напрямку на основі формування сумарної ДС лазерного випромінювання, завдяки частково перетинаючихся 4-х парціальних діаграм спрямованості, за умовою використання комбінацій подовжніх мод («підфарбованих» різницевими частотами міжмодових биттів) 5 Δv54=v5-v4=Avм, Δv97=v9-v7=2Δvм, Δv63=v6v3=3Δvм, Δv82=v8-v2=6Δvм. Груповий сигнал, який складений із несучих частот vn, минаючи МБД, потрапляє на ПРДО де змішується (модулюється) з інформаційним сигналом від МІБ та формує багатоканальний (N) інформаційний сигнал, що передається на ЛА (взаємозв'язок) (фіг. 1, 2). Також, за допомогою МСПМ та модифікованого інформаційного блоку створюється лазерний сигнал із просторовою модуляцією поляризації шляхом розведення лазерного випромінювання (несучої частоти) на два променя з поворотом плоскості поляризації на кут 90° в одному з них (фіг. 3). При цьому випромінювання апертури першого і другого каналів в апертурної плоскості u0v рознесені на відстані ρ. Різність ходу пучків до картинної плоскості ЛА Х0У змінюється вдовж осі X від точки до точки. Обумовлена цім різність фаз між поляризованими компонентами, що ортогональні, поля у картинної плоскості також змінюється від точки до точки. В залежності від різності фаз у картинній плоскості змінюється вигляд поляризації сумарного поля сигналу, що зондує від лінійної через еліптичну і циркулюючу до лінійної, ортогональної к начальної і т.д. Період зміни вигляду поляризації визначається базою між випромінювачами р та відстанню до картинної плоскості R. Розподіл інтенсивності в реєстрованому зображенні ЛА промодульовано по гармонійному закону з коефіцієнтом модуляції, дорівнює значенню ступеня поляризації випромінювання, що відбито, в даній ділянці поверхні ЛА. Водночас сигнал частот міжмодових биттів Δvм, 2Δvм, 3Δvм та 6Δvм потрапляє на МБД, який створений з 4-х п'єзоелектричних дефлекторів. Парціальні ДС попарно зустрічно сканують МБД у кожній із двох ортогональних площин (фіг. 1, 2). Період сканування задається блоком керування дефлекторів, який разом з Лн живляться від керуючого елемента. Проходячи через передаючу оптику, груповий лазерний імпульсний сигнал пар частот: v5,v4=Δvм, v9,v7=2Δvм, v6,v3=3Δvм та v8,v2=6Δvм фокусується в скануємі крапки простору, оскільки здійснюється зустрічне сканування двома парами ДС лазерного випромінювання у кожній із двох ортогональних площин α і β або X і У, при цьому несучі частоти vn та лазерний сигнал із просторовою модуляцією поляризації - проходять вдовж РСН (фіг. 2). При відбитті лазерного сигналу із просторовою модуляцією поляризації, що зондує, від поверхні ЛА змінюється амплітудні і фазові співвідношення між ортогонально поляризаційними компонентами, параметри їх поляризаційні і, відповідно комплексні коефіцієнти когерентності відбитого поля. Просторовий розподіл поляризаційних характеристик такого відбитого сигналу по зміні контрасту модуляційної структури зображення несе також інформацію про типи матеріалів у складі поверхні ЛА, їх характеристики і тощо. Тому у модифікованому інформаційному блоці здійснюється поляризаційна обробка поля, що приймається. Прийняті прийомною оптикою від ЛА інформаційні та відбиті в процесі сканування чотирьох ДС, лазерні імпульсні сигнали і огинаючи сигнали ДС 51041 6 лазерного випромінювання за допомогою фотодетектора перетворюються в електричні імпульсні сигнали на несучій частоті і різницевих частотах міжмодових биттів. Посилювані широкосмуговим підсилювачем, вони розподіляються: - в модифікований інформаційний блок для обробки інформації, що приймається від ЛА та відбитого лазерного сигналу із просторовою модуляцією поляризації, що зондує, від його поверхні для формування та обробки зображення ЛА; - по РП, які настроєні на відповідні частоти: Δvм, 2Δvм, 3Δvм, 6Δvм. При цьому імпульсні сигнали радіочастоти, що надходять з РПΔvм від і РП2ΔvМ від - формують сигнал похибки по куту α, а РП3Δvм від і РП6Δvм від - по куту β. Формування сигналу похибки по куту β, полягає в наступному. Введення імпульсного сигналу (а) з опорного каналу Δvм, перетвореного ФІ1 у «пачки» опорних імпульсів на частоті Δvм oп, надходить на схему «І». Виділений і посилений імпульсний сигнал з PITΔvм ВІД частоти міжмодових биттів Δvм від (фіг. 3, 4), детектується Дет, у виді огинаючей сигналу, що змінюється за законом руху ДС лазерного випромінювання і, після проходження Ф, перетворюється у ФІ2 у крапках переходів періодів сканування в імпульси (один імпульс за період сканування), надходить на тригер «1», перекидуючи його. У цей же час, виділений і посилений РП2Δvм від імпульсний сигнал частоти міжмодових биттів 2Δvм від детектується, виділяючи огинаючу сигналу, що змінюється по такому ж закону і, проходячи Ф, перетворюються у ФІ2 у крапках переходів періодів коливань в імпульси (один імпульс за період сканування) та надходить на тригер «0», встановлюючи його у вихідний стан. Задача виміру часового інтервалу в схемі «І» із заданою точністю, полягає у встановленні критерію початку і кінця відліку тимчасового інтервалу по визначених характеристиках значення імпульсних сигналів, що надходять на входи схеми «І». У зв'язку з тим, що передній фронт імпульсу досить малий у порівнянні з дозволом, що вимагається за часом, характерними значеннями сигналу, що визначають начало і кінець відліку часового інтервалу є граничне значення Uп (порогове значення напруги) (фіг. 5). Завдяки періодичному за цикл сканування відкриттю і закриттю тригером схеми «І», регулюється проходження імпульсів у схемі «І» від ФІ1, тобто відбувається виділення «пачок» імпульсів, число яких пропорційно куту відхилення ЛА від РСН (фіг. 5, 6). Підраховані лічильником імпульси, перетворюються цифро-аналоговим перетворювачем в аналоговий сигнал похибки з необхідним знаком, що змішується у ФНЧ з імпульсним сигналом від каналу кутових швидкостей Л А (б) для уточнення похибки збігу по кутах. Завдяки обліку вимірювальної інформації від каналу кутових швидкостей (б) у ФНЧ усуваються динамічна і флуктуаційна похибки фільтрації [4]. Відфільтрований у ФНЧ і посилений підсилювачем сигналу похибки, отриманий сигнал відпрацьовується за допомогою виконавчого механізму (α), надходить від ПСПа на 7 вхід ЕЦОМ та виділяється в ній у вигляді числа, пропорційного вимірюваному куту азимута α. Якщо ЛА знаходиться вище РСН, то на схему «І» першим надходить імпульс з ФІ2 міжмодової частоти Δvм від, а на тригер надходить другим імпульс з ФІ2 міжмодової частоти 2Δvм від (фіг. 1, 5, 6). На схему «І» від тригера подається строб, тривалість якого пропорційна відхиленню ЛА від РСН. Цей часовий інтервал виміряється методом рахунка імпульсів частоти міжмодових биттів Δvм. Оскільки тривалість строба залежить лише від величини відхилення ЛА від РСН, а не від сторони відхилення, необхідно мати схему визначення полярності сигналу похибки («+» або «-»). Якщо ЛА буде розташований нижче РСН, то першим надійде імпульс від ФІ2 з каналу 2 Δvм від, а другим - з каналу Δvм від. Визначення знаку («+» або «-»), або сторони відхилення ЛА від РСН (фіг. 1; 6 а, б) складається в наступному. Якщо ЛА знаходиться вище РСН, то імпульс 1 (фіг. 1, 5 а) від каналу Δvм від випереджає імпульс 2 каналу 2 Δvм від. Оскільки строб від тригера затримується на час, що перевищує тривалість імпульсу 1 (або 2), то схема збігів «І» не спрацює, тому що імпульс 1 не збіжиться в часі з даним стробом. Знак сигналу похибки по куту α залишається позитивним («+»). Якщо ЛА знаходиться нижче РСН (фіг. 4 б), то імпульс 1 відстає від імпульсу 2, тому він збігається в часі зі стробом. Схема «І» спрацьовує і змінює знак («-» або полярність) напруги сигналу похибки по куту α. Імпульс зі схеми «І» подається на знаковий розряд лічильника імпульсів з частотою Δvм Число імпульсів у лічильнику пропорційно куту відхилення α від РСН. Форматування сигналу похибки по куту β, відбувається таким же чином, як для сигналу похибки по куту α. Виконавчі механізми ВМα і BMβ, розвертають приймально-передаючу платформу таким чином, щоб ЛА знаходився на РСН каналу АСН, тобто на РСН сумарної ДС лазерного випромінювання, яка сформована з чотирьох парціальних ДС (фіг. 2, 6). 51041 8 Відображення інформації, що приймається (передається) від ЛА та обробка (вимірювання) кутів азимута α і міста β відбувається в ЕЦОМ. В разі необхідності виявлення ЛА у заданої крапці простору груповий сигнал, який складений із частот міжмодових биттів і несучих частот vn, сканується у заданій зоні із заданим законом сканування у вигляді сумарної ДС лазерного випромінювання за допомогою модифікованого блоку дефлекторів, де кут та напрямок відхилення сумарної ДС задається БКД (фіг. 1, 2). Випромінювання, яке знаходиться біля рівня втрат синхронізованого одномодового багаточастотного спектру лазера-передавача та є невелике за потужністю - не використовується. Кількість інформаційних каналів (N), що формуються, залежить від кількості мод (несучих частот vn), які мають необхідні вихідні характеристики для використання. Джерела інформації: 1. Патент на корисну модель, № 23213, Україна, МПК G01S 17/42, G01 S 17/66. Канал автоматичного супроводження літальних апаратів за напрямком для лазерної інформаційновимірювальної системи. / О.В. Коломійцев, Г.В. Альошин, В.В. Баранник та ін. - № u200700012; Заяв. 02.01.2007; опубл. 10.05.2007; Бюл. № 6 - 8 с. 2. Патент України на корисну модель № 43787, Україна, MПK G01S 17/42, G01 S 17/66. Канал автоматичного супроводження літальних апаратів за напрямком з додатковим скануванням. / О.В. Коломійцев, Г.В. Альошин, В.В. Бєлімов та ін. - № u200904601; Заяв. 08.05.2009; Опубл. 25.08.2009; Бюл. № 16. - 10 с. 3. Патент України на корисну модель № 43725, Україна, МПК Н04 Q 1/453. Модифікований селектор подовжніх мод. / О.В. Коломійцев, Г.В. Альошин, В.В. Бєлімов та ін. - № u200903693; Заяв. 15.04.2009; Опубл. 25.08.2009; Бюл. № 16. - 6 с. 4. Деклараційний патент України на винахід № 65099А, Україна, МПК G01S 17/42, G01 S 17/66. Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів. / О.В. Коломійцев - № 2003054908; Заяв. 15.03.2004; Опубл. 15.03.2004; Бюл. № 3 - 4 с. 9 51041 10 11 Комп’ютерна верстка І.Скворцова 51041 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюChannel for automated tracking of aircrafts in direction with possibility of formation and processing of image of an a
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Alioshyn Hennadii Vasyliovych, Vasyliev Dmytro Hennadiiovych, Vorobiov Ruslan Volodymyrovych, Zakirov Zamir Zabirovych, Klivets Serhii Ivanovych, Kostenko Ihor Leonidovych, Rysovanyi Oleksandr Mykolaiovych, Sidchenko Serhii Oleksandrovych, Chelpanov Artem Volodymyrovych
Назва патенту російськоюКанал автоматического сопровождения летательных аппаратов по направлению с возможностью формирования и обработки изображения ла
Автори російськоюКоломийцев Алексей Владимирович, Алешин Геннадий Васильевич, Васильев Дмитрий Геннадьевич, Воробьев Руслан Владимирович, Закиров Замир Забирович, Кливец Сергей Иванович, Костенко Игорь Леонидович, Рисованый Александр Николаевич, Сидченко Сергей Александрович, Челпанов Артем Владимирович
МПК / Мітки
МПК: G01S 17/42, G01S 17/66
Мітки: канал, обробки, можливістю, літальних, напрямком, зображення, автоматичного, супроводження, апаратів, формування
Код посилання
<a href="https://ua.patents.su/6-51041-kanal-avtomatichnogo-suprovodzhennya-litalnikh-aparativ-za-napryamkom-z-mozhlivistyu-formuvannya-ta-obrobki-zobrazhennya-la.html" target="_blank" rel="follow" title="База патентів України">Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ла</a>
Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ла
Номер патенту: 51039
Опубліковано: 25.06.2010
Автори: Челпанов Артем Володимирович, Васильєв Дмитро Геннадійович, Коломійцев Олексій Володимирович, Толстолузька Олена Геннадіївна, Альошин Геннадій Васильович, Клівець Сергій Іванович, Сідченко Сергій Олександрович, Рисований Олександр Миколайович, Садовий Костянтин Віталійович, Воробйов Руслан Володимирович
МПК: G01S 17/42
Мітки: апаратів, канал, швидкості, радіальної, формування, зображення, літальних, обробки, можливістю, вимірювання
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, схему "і", лічильник, змішувачі,...
Канал вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ла
Номер патенту: 51040
Опубліковано: 25.06.2010
Автори: Рисований Олександр Миколайович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Закіров Замір Забірович, Челпанов Артем Володимирович, Сідченко Сергій Олександрович, Клівець Сергій Іванович, Костенко Ігор Леонідович, Воробйов Руслан Володимирович, Васильєв Дмитро Геннадійович
МПК: G01S 17/42, G01S 17/66
Мітки: формування, швидкостей, канал, зображення, можливістю, вимірювання, кутових, літальних, апаратів, обробки
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми...
Канал автоматичного супроводження літальних апаратів за напрямком
Номер патенту: 43069
Опубліковано: 27.07.2009
Автори: Копилов Олександр Олексійович, Васильєв Дмитро Геннадійович, Макаров Сергій Анатолійович, Рисований Олександр Миколайович, Хударковський Костянтин Ігорович, Коломійцев Олексій Володимирович, Катунін Альберт Миколайович, Бєлімов Володимир Васильович, Висоцький Олег Володимирович, Альошин Геннадій Васильович
МПК: G01S 17/42, G01S 17/66
Мітки: напрямком, літальних, автоматичного, канал, апаратів, супроводження
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), блок дефлекторів, передавальну оптику, приймаючу оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових бітів, детектори, фільтри, формувачі імпульсів, тригери ("1"|"0"), схеми "і", лінії затримки,...
Канал автоматичного супроводження літальних апаратів за напрямком для лвс
Номер патенту: 45543
Опубліковано: 10.11.2009
Автори: Катунін Альберт Миколайович, Бєлімов Володимир Васильович, Хударковський Костянтин Ігорович, Кадубенко Станіслав Валентінович, Альошин Геннадій Васильович, Сідченко Сергій Олександрович, Васильєв Дмитро Геннадійович, Коломійцев Олексій Володимирович, Рисований Олександр Миколайович, Клівець Сергій Іванович
МПК: G01S 17/42, G01S 17/66
Мітки: автоматичного, канал, апаратів, напрямком, лвс, літальних, супроводження
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових бітів, детектори, фільтри, формувачі імпульсів, тригери ("1''|"0"), схеми "і", лінії затримки,...
Канал автоматичного супроводження літальних апаратів за напрямком з додатковим скануванням для лвс
Номер патенту: 47086
Опубліковано: 11.01.2010
Автори: Васильєв Дмитро Геннадійович, Сідченко Сергій Олександрович, Хударковський Костянтин Ігорович, Рисований Олександр Миколайович, Бєлімов Володимир Васильович, Висоцький Олег Володимирович, Гоготов Валерій Васильович, Копилов Олександр Олексійович, Макаров Сергій Анатолійович, Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: скануванням, літальних, додатковим, лвс, супроводження, напрямком, автоматичного, канал, апаратів
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком з додатковим скануванням для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, детектори, фільтри, формувачі імпульсів, тригери ("1"|"0"),...
Попередній патент: Канал вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ла
Наступний патент: Пристрій для отримання гранульованого продукту
Випадковий патент: Селективне джерело ультрафіолетового випромінювання