Пристрій для визначення координат центра тяжіння зображення
Номер патенту: 51877
Опубліковано: 10.08.2010
Автори: Кожем'яко Володимир Прокопович, Бондаренко Наталія Володимирівна, Павлов Сергій Володимирович
Формула / Реферат
1. Пристрій для визначення координат центра тяжіння зображення, що містить матрицю фотоперетворювачів, аналого-цифровий перетворювач, два накопичувальні суматори, вхід першого з яких сполучений з виходом аналого-цифрового перетворювача, а вихід сполучений з входом другого накопичувального суматора, блок ділення, перший і другий інформаційні входи якого сполучені відповідно з виходами першого і другого накопичувальних суматорів, два регістри, інформаційний вхід першого регістра сполучений з інформаційним виходом блока ділення, виходи першого і другого регістрів є виходами пристрою, два лічильники, інформаційний вхід першого з яких є входом встановлення кількості рядків матриці фотоперетворювачів, а інформаційний вхід другого лічильника є входом встановлення кількості стовпців матриці фотоперетворювачів, два дешифратори, входи яких сполучені відповідно з виходами першого і другого лічильників, блок керування, перший вхід якого є входом запуску пристрою, перший вихід блока керування сполучений з входом дозволу запису першого лічильника, другий, третій, четвертий, п'ятий, шостий, сьомий і восьмий виходи блока керування з'єднані відповідно з входом дозволу запису другого лічильника, входом обнулення першого блока ділення, синхровходом першого накопичувального суматора, синхровходом другого накопичувального суматора, входом віднімання першого лічильника, входом віднімання другого лічильника, входом дозволу запису першого регістра, який відрізняється тим, що містить третій і четвертий накопичувальні суматори, другий блок ділення, тригер і елемент І, вихід якого сполучений з другим входом блока керування, третій і четвертий входи якого сполучені відповідно з першими інформаційними виходами першого і другого дешифраторів, дев'ятий, десятий, одиннадцатой і дванадцятий виходи блока керування сполучені відповідно з керуючим входом аналогово-цифрового перетворювача, синхровходом четвертого накопичувального суматора, керуючими входами першого і другого блоків ділення і входом встановлення в "1" тригера, входом обнуления третього накопичувального суматора, третій вихід блока керування з'єднаний з входом обнуления другого блока ділення, четвертий вихід блока керування сполучений з синхровходом третього накопичувального суматора, другий вихід блока керування сполучений з входами обнуления, тригера, першого, другого і четвертого накопичувальних суматорів, восьмий вихід блока керування сполучений з входом дозволу запису другого регістра, виходи першого дешифратора сполучені з першою групою керуючих входів матриці фотоперетворювачів, друга група якої сполучена з виходами другого дешифратора, а вихід - з інформаційним входом аналогово-цифрового перетворювача, вихід якого підключений до інформаційного входу третього накопичувального суматора, вихід якого підключений до інформаційного входу четвертого накопичувального суматора, вихід якого підключений до першого інформаційного входу другого блока ділення, інформаційний вихід якого підключений до інформаційного входу другого регістра, вихід тригера підключений до першого входу елемента І, другий вхід якого сполучений з виходом кінця ділення блока ділення, вихід кінця ділення другого блока ділення підключений до третього входу елемента І, вихід першого накопичувального суматора підключений до другого інформаційного входу другого блока ділення.
2. Пристрій за п. 1, який відрізняється тим, що блок керування містить генератор тактових імпульсів, тригер елемента І, регістр, комбінаційний елемент і блок постійної пам'яті, перший-дванадцятий виходи якого є виходами блока керування, тринадцятий вихід блока постійної пам'яті підключений до входу встановлення в "1" тригера, вхід обнулення якого з'єднаний з входом обнулення регістра і є першим входом блока керування, вихід тригера підключений до першого входу елемента І, інший вхід якого підключений до виходу генератора тактових імпульсів, вихід елемента І підключений до синхровходу регістра, виходи якого підключені до відповідних адресних входів блока постійної пам'яті, чотирнадцятий-двадцять перший виходи якого з'єднані відповідно з першим-восьмим входами елемента комбінаційної логіки, дев'ятий, десятий і одинадцятий входи якого є другим-третім і четвертим входами блока керування, виходи елемента комбінаційної логіки сполучені з відповідними інформаційними входами регістра.
Текст
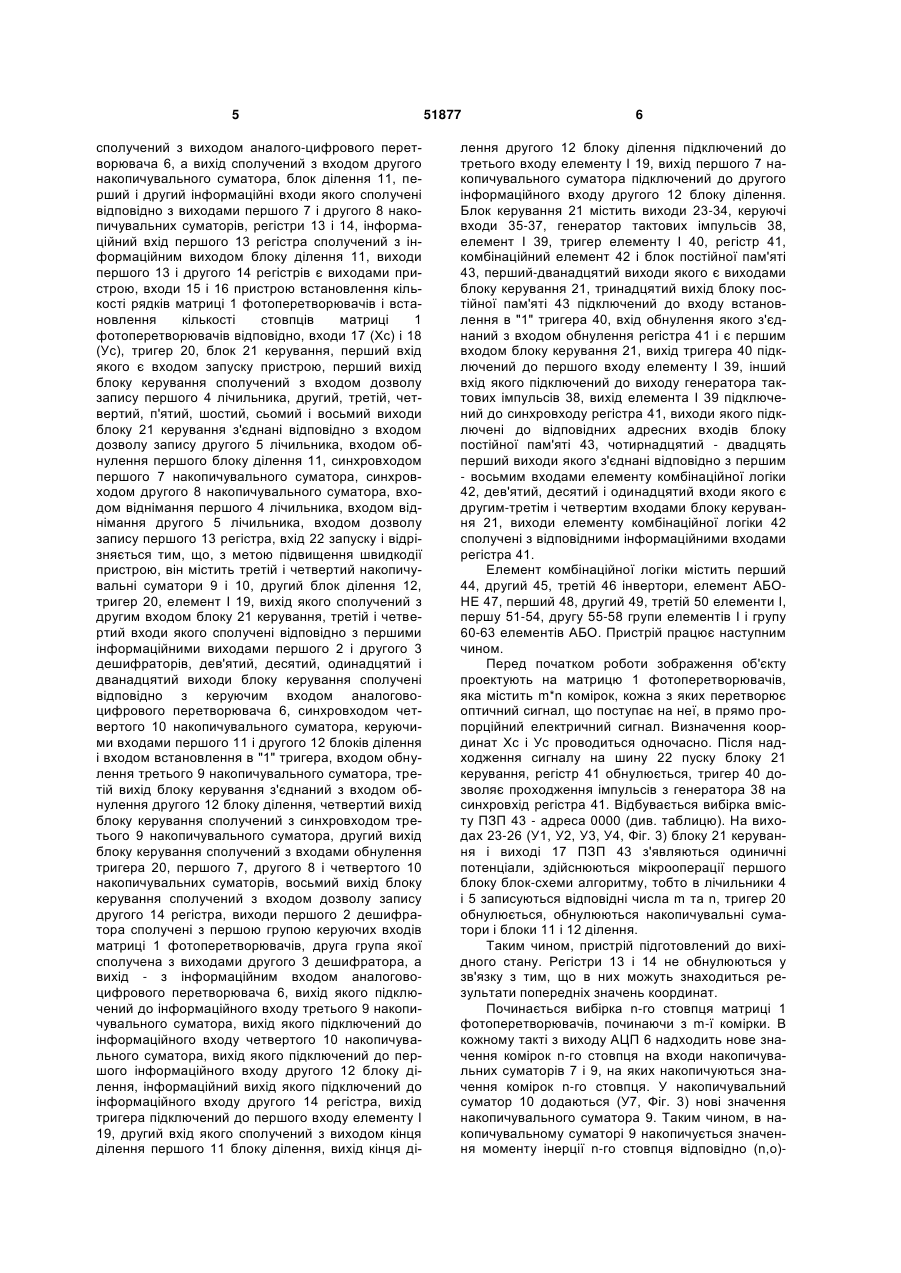
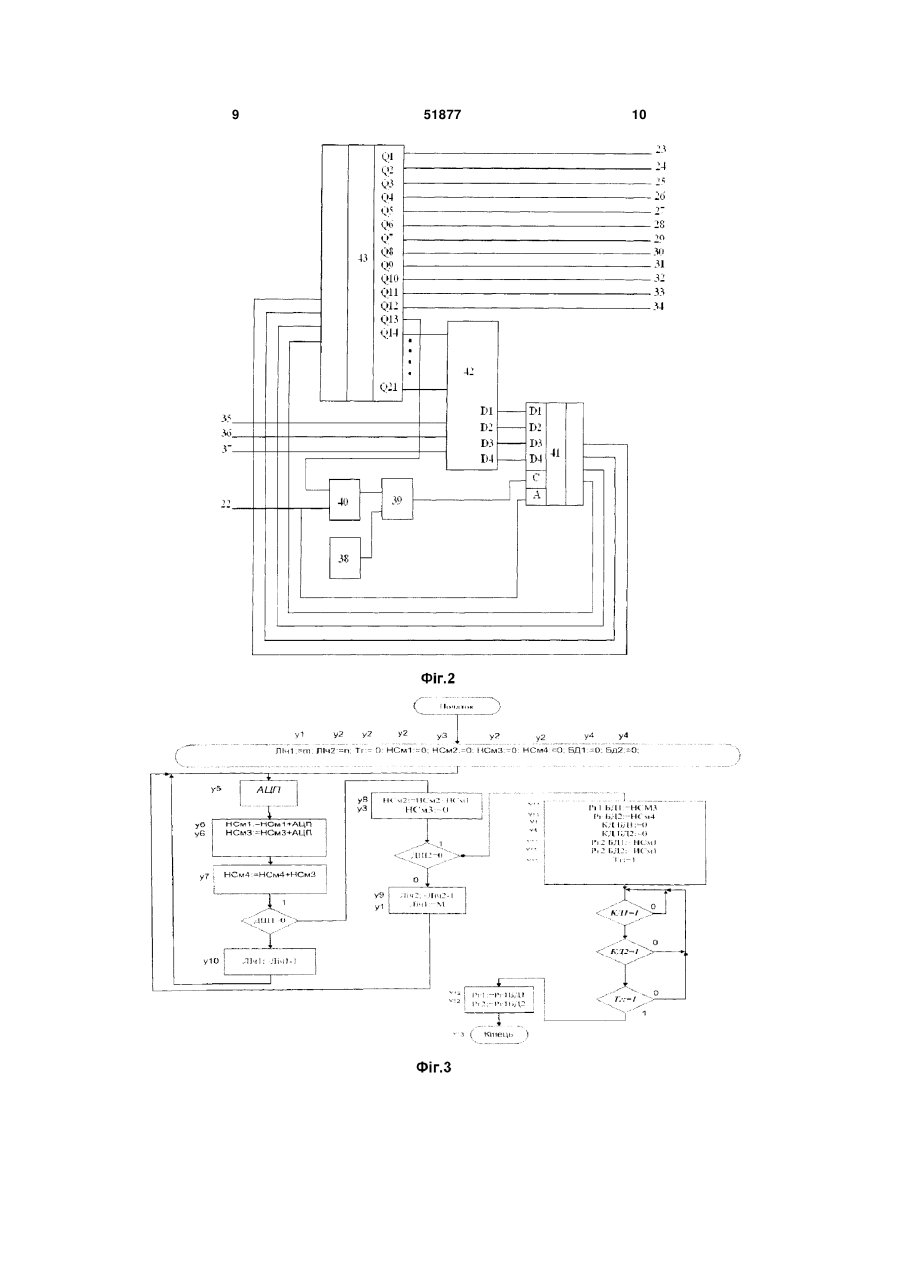
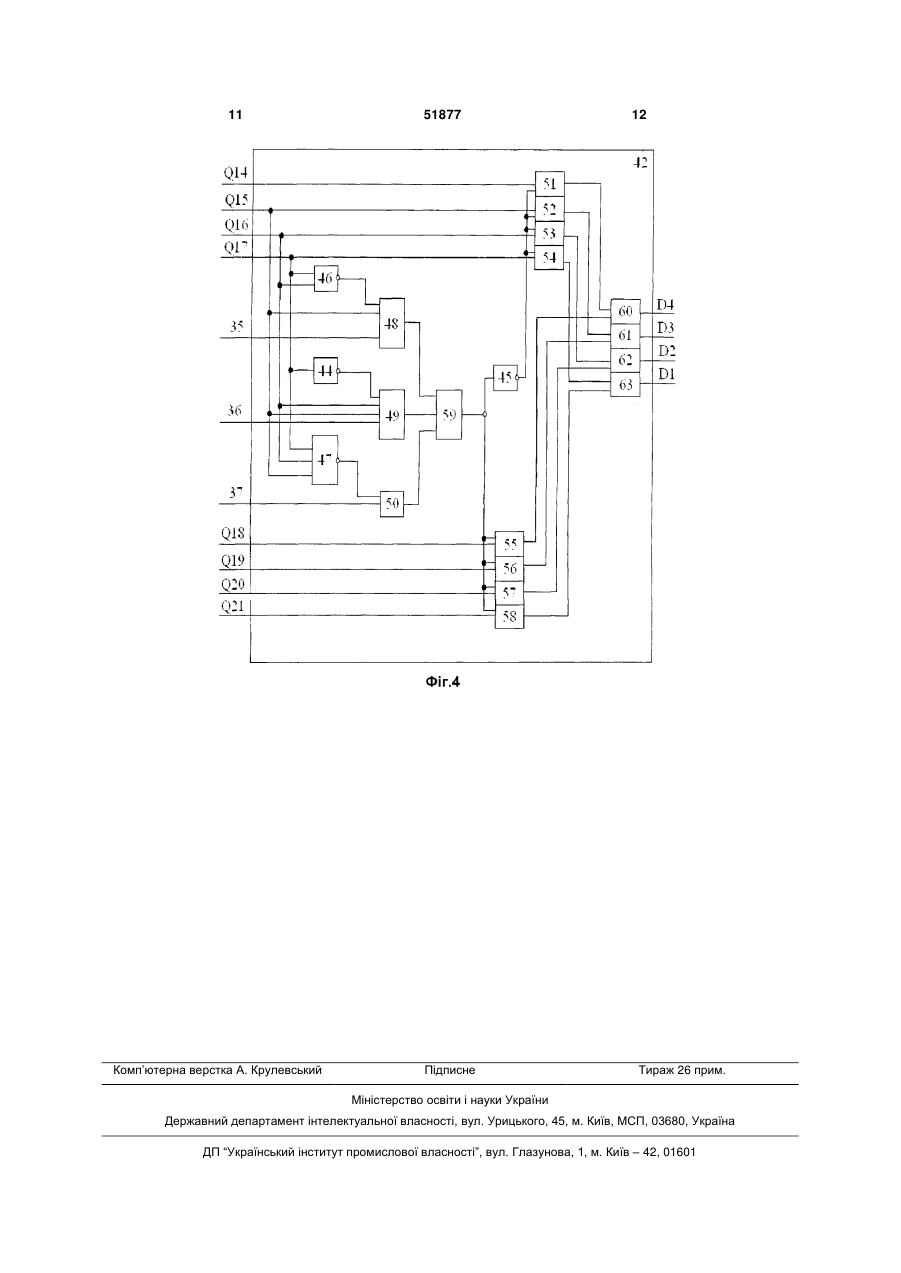
1. Пристрій для визначення координат центра тяжіння зображення, що містить матрицю фотоперетворювачів, аналого-цифровий перетворювач, два накопичувальні суматори, вхід першого з яких сполучений з виходом аналого-цифрового перетворювача, а вихід сполучений з входом другого накопичувального суматора, блок ділення, перший і другий інформаційні входи якого сполучені відповідно з виходами першого і другого накопичувальних суматорів, два регістри, інформаційний вхід першого регістра сполучений з інформаційним виходом блока ділення, виходи першого і другого регістрів є виходами пристрою, два лічильники, інформаційний вхід першого з яких є входом встановлення кількості рядків матриці фотоперетворювачів, а інформаційний вхід другого лічильника є входом встановлення кількості стовпців матриці фотоперетворювачів, два дешифратори, входи яких сполучені відповідно з виходами першого і другого лічильників, блок керування, перший вхід якого є входом запуску пристрою, перший вихід блока керування сполучений з входом дозволу запису першого лічильника, другий, третій, четвертий, п'ятий, шостий, сьомий і восьмий виходи блока керування з'єднані відповідно з входом дозволу запису другого лічильника, входом обнулення першого блока ділення, синхровходом першого накопичувального суматора, синхровходом другого накопичувального суматора, входом віднімання першого лічильника, входом віднімання другого лічильника, входом дозволу запису першого регістра, який відрізняється тим, що містить третій і четвертий накопичувальні суматори, другий блок ділення, тригер і елемент І, вихід якого сполучений з другим входом блока керування, третій і четвертий входи якого сполучені відповідно з першими інформаційними виходами першого і другого дешифраторів, дев'ятий, десятий, одиннадцатой і 2 (19) 1 3 51877 4 ка постійної пам'яті, чотирнадцятий-двадцять перший виходи якого з'єднані відповідно з першимвосьмим входами елемента комбінаційної логіки, дев'ятий, десятий і одинадцятий входи якого є другим-третім і четвертим входами блока керування, виходи елемента комбінаційної логіки сполучені з відповідними інформаційними входами регістра. Корисна модель відноситься до автоматики і вимірювальної техніки і може бути використана в різних контрольно-вимірювальних пристроях, зокрема, в системах обробки зображень, розпізнавання образів, в робототехніці, в пристроях позиціонування. Пристроєм із аналогічними можливостями функціонування є пристрій для визначення координат центру тяжіння зображення (а. с. CPCP № 1714632, кл. G06K 9/00, 1992), що містить матрицю фотоперетворювачів, перший та другий лічильники, аналогово-цифровий перетворювач, помножувачі, перший блок пам'яті, віднімач, блок керування, перший, другий та третій накопичувальні суматори, другий блок пам'яті, перший, другий та третій дільники, блок керування містить тактовий генератор, лічильник адреси та блок пам'яті. Недоліком такого пристрою є обмежені функціональні можливості. Також відомий пристрій для визначення координат центру тяжіння зображення (а. с. CPCP № 1783554, кл. G06K 9/00, 1992), що містить фотоприймальний блок, лічильник рядків, лічильник стовпців, аналого-цифровий перетворювач, чотири регістри, помножувач, блок синхронізації, блок керування. Недоліком такого пристрою є обмежені функціональні можливості. Найбільш близьким за технічною суттю є пристрій для визначення координат центру тяжіння зображення (а.с. CPCP №1427395, кл. G06K 9/00, 1988), що містить матрицю фотоперетворювачів, блок керування, два лічильники, два комутатори, два регістри, два дешифратори, два накопичувальні суматори, аналого-цифровий перетворювач, вхідні шини розмірів матриці фотоперетворювачів m і n, вихідні шини координат Х с і Y c , блок ділення. Входи першого комутатора з'єднані відповідно з виходами матриці фотоперетворювачів, а виходи з'єднані між собою і з'єднані з аналоговим входом АЦП, вхід аналогової «землі» якого з'єднаний з «землею» і зі з'єднаними між собою входами другого комутатора, виходи якого з'єднані відповідно з входами матриці фотоперетворювачів. Керуючі входи першого комутатора з'єднані відповідно з виходами першого дешифратора, вхід якого з'єднаний з виходом другого лічильника, вхід якого з'єднаний з вхідною шиною n, вхідна шина m з'єднана з входом першого лічильника, вихід якого з'єднаний з входом другого дешифратора, виходи якого з'єднані відповідно з керуючими входами другого комутатора. Вихід АЦП з'єднаний з входом першого накопичувального суматора, вихід якого з'єднаний з першим входом ділення і з входом другого накопичувального суматора, вихід якого з'єднаний з другим входом блока ділення, вихід якого з'єднаний з входами першого і другого регістрів, виходи яких з'єднані відповідно з вихідними шинами X c і Y c . Входи блока керування з'єднані відповідно з виходами переповнення першого і другого лічильників та з виходом «Кінець ділення» блока ділення. Виходи блока керування з'єднані відповідно з входами скидання першого і другого регістрів, входами скидання першого і другого накопичувальних суматорів, з входом дозволу запису другого лічильника, з входом дозволу запису першого лічильника, з синхровходом першого накопичувального суматора, з входом віднімання першого лічильника, з синхровходом другого накопичувального суматора, з входом віднімання другого лічильника, з керуючими входами блока ділення, з входом дозволу запису першого регістра, з входом дозволу запису другого регістра, з шиною запуску пристрою. Виходи з першого по одинадцятий запам'ятовуючого пристрою є відповідними виходами блока керування. Дванадцятий вихід постійного запам'ятовуючого пристрою з'єднаний з входом скидання тригера. Виходи з тринадцятого по шістнадцятий постійного запам'ятовуючого пристрою з'єднані відповідно з входами регістру. Недоліком такого пристрою є логарифмічна складність визначення координат центру тяжіння зображення та обмеженість функціональних можливостей, що зумовлює недостатньо високу швидкодію. В основу корисної моделі покладено створення пристрою для визначення координат центру тяжіння зображення з розширеними функціональними можливостями та підвищеною швидкодією. Поставлена мета досягається одночасним обчисленням моментів інерції зображення нульового і першого порядків, за допомогою яких визначаються координати (див. 1-й пункт формули винаходу, рисунок 4, таблицю 1). На Фіг. 1 представлена блок-схема пристрою визначення координат центру тяжіння зображення; на Фіг. 2 - блок керування пристрою: на Фіг. 3 блок-схема алгоритму визначення координат центру тяжіння зображення; на Фіг. 4 - елемент комбінаційної логіки. Пристрій для визначення координат центру тяжіння містить матрицю 1 фотоперетворювачів, дешифратори 2 і 3, входи яких сполучені відповідно з виходами першого 4 і другого 5 лічильників, лічильники 4 і 5, інформаційний вхід першого з яких є входом встановлення кількості рядків матриці 1 фотоперетворювачів, а інформаційний вхід другого лічильника є входом встановлення кількості стовпців матриці 1 фотоперетворювачів, аналого-цифровий перетворювач (АЦП) 6, накопичувальні суматори 7 і 8, вхід першого з яких 5 сполучений з виходом аналого-цифрового перетворювача 6, а вихід сполучений з входом другого накопичувального суматора, блок ділення 11, перший і другий інформаційні входи якого сполучені відповідно з виходами першого 7 і другого 8 накопичувальних суматорів, регістри 13 і 14, інформаційний вхід першого 13 регістра сполучений з інформаційним виходом блоку ділення 11, виходи першого 13 і другого 14 регістрів є виходами пристрою, входи 15 і 16 пристрою встановлення кількості рядків матриці 1 фотоперетворювачів і встановлення кількості стовпців матриці 1 фотоперетворювачів відповідно, входи 17 (Xс) і 18 (Ус), тригер 20, блок 21 керування, перший вхід якого є входом запуску пристрою, перший вихід блоку керування сполучений з входом дозволу запису першого 4 лічильника, другий, третій, четвертий, п'ятий, шостий, сьомий і восьмий виходи блоку 21 керування з'єднані відповідно з входом дозволу запису другого 5 лічильника, входом обнулення першого блоку ділення 11, синхровходом першого 7 накопичувального суматора, синхровходом другого 8 накопичувального суматора, входом віднімання першого 4 лічильника, входом віднімання другого 5 лічильника, входом дозволу запису першого 13 регістра, вхід 22 запуску і відрізняється тим, що, з метою підвищення швидкодії пристрою, він містить третій і четвертий накопичувальні суматори 9 і 10, другий блок ділення 12, тригер 20, елемент І 19, вихід якого сполучений з другим входом блоку 21 керування, третій і четвертий входи якого сполучені відповідно з першими інформаційними виходами першого 2 і другого 3 дешифраторів, дев'ятий, десятий, одинадцятий і дванадцятий виходи блоку керування сполучені відповідно з керуючим входом аналоговоцифрового перетворювача 6, синхровходом четвертого 10 накопичувального суматора, керуючими входами першого 11 і другого 12 блоків ділення і входом встановлення в "1" тригера, входом обнулення третього 9 накопичувального суматора, третій вихід блоку керування з'єднаний з входом обнулення другого 12 блоку ділення, четвертий вихід блоку керування сполучений з синхровходом третього 9 накопичувального суматора, другий вихід блоку керування сполучений з входами обнулення тригера 20, першого 7, другого 8 і четвертого 10 накопичувальних суматорів, восьмий вихід блоку керування сполучений з входом дозволу запису другого 14 регістра, виходи першого 2 дешифратора сполучені з першою групою керуючих входів матриці 1 фотоперетворювачів, друга група якої сполучена з виходами другого 3 дешифратора, а вихід - з інформаційним входом аналоговоцифрового перетворювача 6, вихід якого підключений до інформаційного входу третього 9 накопичувального суматора, вихід якого підключений до інформаційного входу четвертого 10 накопичувального суматора, вихід якого підключений до першого інформаційного входу другого 12 блоку ділення, інформаційний вихід якого підключений до інформаційного входу другого 14 регістра, вихід тригера підключений до першого входу елементу І 19, другий вхід якого сполучений з виходом кінця ділення першого 11 блоку ділення, вихід кінця ді 51877 6 лення другого 12 блоку ділення підключений до третього входу елементу І 19, вихід першого 7 накопичувального суматора підключений до другого інформаційного входу другого 12 блоку ділення. Блок керування 21 містить виходи 23-34, керуючі входи 35-37, генератор тактових імпульсів 38, елемент І 39, тригер елементу І 40, регістр 41, комбінаційний елемент 42 і блок постійної пам'яті 43, перший-дванадцятий виходи якого є виходами блоку керування 21, тринадцятий вихід блоку постійної пам'яті 43 підключений до входу встановлення в "1" тригера 40, вхід обнулення якого з'єднаний з входом обнулення регістра 41 і є першим входом блоку керування 21, вихід тригера 40 підключений до першого входу елементу І 39, інший вхід якого підключений до виходу генератора тактових імпульсів 38, вихід елемента І 39 підключений до синхровходу регістра 41, виходи якого підключені до відповідних адресних входів блоку постійної пам'яті 43, чотирнадцятий - двадцять перший виходи якого з'єднані відповідно з першим - восьмим входами елементу комбінаційної логіки 42, дев'ятий, десятий і одинадцятий входи якого є другим-третім і четвертим входами блоку керування 21, виходи елементу комбінаційної логіки 42 сполучені з відповідними інформаційними входами регістра 41. Елемент комбінаційної логіки містить перший 44, другий 45, третій 46 інвертори, елемент АБОНЕ 47, перший 48, другий 49, третій 50 елементи І, першу 51-54, другу 55-58 групи елементів І і групу 60-63 елементів АБО. Пристрій працює наступним чином. Перед початком роботи зображення об'єкту проектують на матрицю 1 фотоперетворювачів, яка містить m*n комірок, кожна з яких перетворює оптичний сигнал, що поступає на неї, в прямо пропорційний електричний сигнал. Визначення координат Xc і Ус проводиться одночасно. Після надходження сигналу на шину 22 пуску блоку 21 керування, регістр 41 обнулюється, тригер 40 дозволяє проходження імпульсів з генератора 38 на синхровхід регістра 41. Відбувається вибірка вмісту ПЗП 43 - адреса 0000 (див. таблицю). На виходах 23-26 (У1, У2, У3, У4, Фіг. 3) блоку 21 керування і виході 17 ПЗП 43 з'являються одиничні потенціали, здійснюються мікрооперації першого блоку блок-схеми алгоритму, тобто в лічильники 4 і 5 записуються відповідні числа m та n, тригер 20 обнулюється, обнулюються накопичувальні суматори і блоки 11 і 12 ділення. Таким чином, пристрій підготовлений до вихідного стану. Регістри 13 і 14 не обнулюються у зв'язку з тим, що в них можуть знаходиться результати попередніх значень координат. Починається вибірка n-го стовпця матриці 1 фотоперетворювачів, починаючи з m-ї комірки. В кожному такті з виходу АЦП 6 надходить нове значення комірок n-го стовпця на входи накопичувальних суматорів 7 і 9, на яких накопичуються значення комірок n-го стовпця. У накопичувальний суматор 10 додаються (У7, Фіг. 3) нові значення накопичувального суматора 9. Таким чином, в накопичувальному суматорі 9 накопичується значення моменту інерції n-го стовпця відповідно (n,о) 7 51877 комірки. При виборі (n,о)-ї комірки на виході 35 дешифратора 2 з'являється сигнал. Після цього в суматорі 8 накопичується значення накопичувального суматора 7, накопичувальний суматор 9 обнулюється, з лічильника 5 віднімається одиниця, а в лічильник 4 записується значення m. Відбувається аналогічна вибірка наступного (n-1)-го стовпця комірок. Після вибірки комірок 0-го стовпця в накопичувальному суматорі 7 знаходиться момент інерції 00 (нульового порядку) зображення, в накопичу 8 вальних суматорах 8 і 10 - значення моментів інерції 01 та 10 (першого порядку) зображення. Тому відбувається перезапис вмістів з накопичувальних суматорів 7, 8 і 9 в регістри блоків 11 і 12 ділення, в яких проводиться ділення моментів інерції першого порядку на момент інерції нульового порядку. Результат переписується в регістри 13 і 14. Введення нових вузлів і конструктивних зв'язків дозволяє підвищити швидкодію пристрою. Пристрій для визначення координат центру тяжіння зображення Таблиця Біт № Адреса 1 0000 2 0001 3 0010 4 0011 5 0100 6 0101 7 0110 8 0111 9 1000 10 1001 11 1010 1 У1 1 0 0 0 0 0 1 0 0 0 0 2 3 У2 У3 1 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 4 У4 1 0 0 0 0 0 0 1 0 0 0 5 У5 0 1 0 0 0 0 0 0 0 0 0 6 7 У6 У7 0 0 0 0 1 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 8 У8 0 0 0 0 0 1 0 0 0 0 0 9 У9 0 0 0 0 0 0 1 0 0 0 0 10 11 12 У10 У11 У12 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 13 У13 0 0 0 0 0 0 0 0 0 0 1 14 15 16 17 18 19 20 21 A1 А2 0001 0000 0010 0000 0011 0000 0100 0101 0001 0000 0110 0111 0001 0000 1000 1001 1000 1001 1010 0000 1011 0000 9 51877 10 11 Комп’ютерна верстка А. Крулевський 51877 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice to determine centre of image gravity coordinates
Автори англійськоюKozhemiako Volodymyr Prokopovych, Bondarenko Nataliia Volodymyrivna, Pavlov Serhii Volodymyrovych
Назва патенту російськоюУстройство для определения координат центра тяжести изображения
Автори російськоюКожемяко Владимир Прокопович, Бондаренко Наталия Владимировна, Павлов Сергей Владимирович
МПК / Мітки
МПК: G06K 9/00
Мітки: тяжіння, координат, центра, пристрій, зображення, визначення
Код посилання
<a href="https://ua.patents.su/6-51877-pristrijj-dlya-viznachennya-koordinat-centra-tyazhinnya-zobrazhennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення координат центра тяжіння зображення</a>
Пристрій для визначення координат центра мас зображення
Номер патенту: 47690
Опубліковано: 25.02.2010
Автори: Штельмах Олександр Олександрович, Новицький Руслан Михайлович, Кожем'яко Володимир Прокопович
МПК: G06K 9/00
Мітки: визначення, зображення, пристрій, центра, координат, мас
Формула / Реферат:
Пристрій для визначення координат центру мас зображення, що містить фотоелектричний датчик, два регістри, чотири лічильники, блок керування, відповідні виходи якого з'єднані з входами регістрів, схему порівняння, чотири накопичувальних суматори, аналого-цифровий перетворювач, блок вибору рядків фотоелектричного датчика, блок вибору стовпців фотоелектричного датчика, два дешифратори, блок дозволу зчитування фотоелектричного датчика, перший та...
Пристрій для визначення координат центра мас зображення

Номер патенту: 37742
Опубліковано: 10.12.2008
Автори: Ракитянська Наталя Анатоліївна, Панасюк Юрій Олександрович, Кожем'яко Володимир Прокопович, Бойко Оксана Аркадіївна
МПК: G06K 9/00
Мітки: пристрій, мас, центра, координат, визначення, зображення
Формула / Реферат:
Пристрій для визначення координат центра мас зображення, який містить фотоелектричний датчик, два регістри, чотири лічильники, блок керування, відповідні виходи якого з'єднані з входами регістрів, схему порівняння, чотири накопичуваних суматори, аналого-цифровий перетворювач, блок вибору рядків фотоелектричного датчика, блок вибору стовпців фотоелектричного датчика, два дешифратори, блок дозволу зчитування фотоелектричного датчика, перший і...
Пристрій для визначення координат енергетичного центру зображення світлової плями
Номер патенту: 28111
Опубліковано: 26.11.2007
Автори: Білинський Володимир Йосипович, Кухарчук Василь Васильович, Білинський Йосип Йосипович
МПК: G06K 9/46
Мітки: світлової, зображення, центру, визначення, координат, плями, пристрій, енергетичного
Формула / Реферат:
Пристрій для визначення координат енергетичного центру зображення світлової плями, що містить фотоприймальний блок у вигляді фотоматриці, блок керування та обробки даних, який відрізняється тим, що в нього введено аналогово-цифровий перетворювач, вхід якого пов'язаний з виходом фотоматриці, а вихід є входом блока керування та обробки даних, системи горизонтального та вертикального зсуву, входи яких пов'язані з виходами блока керування та...
Пристрій для визначення координат точки зображення з максимальною яскравістю
Номер патенту: 22957
Опубліковано: 05.05.1998
Автори: Кожем'яко Володимир Прокопович, Колесницький Олег Костянтинович, Василецький Сергій Анатолійович
МПК: G06K 9/46
Мітки: пристрій, точки, визначення, максимальною, координат, яскравістю, зображення
Формула / Реферат:
Пристрій для визначення координат точки зображення з максимальною яскравістю, що містить фотоприймальний блок, у вигляді фотоматриці, регістр, дешифратор, блок управління, який відрізняється тим, що в нього введено другий регістр і другий дешифратор, причому фотоматриця являє собою Інтегральну матрицю фоточутливих біспін-приладів на загальній підкладинці, кожний вивід рядка фотоматриці з'єднаний з омічним контактом біспін-приладів цього рядка...
Пристрій формування тепловізійного зображення
Номер патенту: 36856
Опубліковано: 10.11.2008
Автор: Кондратов Петро Олександрович
МПК: H04N 5/33
Мітки: формування, тепловізійного, пристрій, зображення
Формула / Реферат:
Пристрій формування тепловізійного зображення, що містить аналого-цифровий перетворювач, вхід якого є входом пристрою, N послідовно з'єднаних вузлів накопичення кадрів, у склад кожного з них входить блок пам'яті, вхід якого є входом цього вузла, а вихід - його першим виходом, суматор, вихід якого є виходом пристрою, який відрізняється тим, що у нього додатково введено у склад кожного з вузлів накопичення подільник сигналу із змінним...
Попередній патент: Патрон для нарізання різі
Наступний патент: Система моделювання процесів керування наукоємним підприємством
Випадковий патент: Канатний анкер з ін'єкційним каналом