Пристрій для прийому інформаційного сигналу і спосіб його декодування та пристрій для передачі інформаційного сигналу і спосіб його передачі
Формула / Реферат
1. Пристрій для прийому інформаційного сигналу, який включає:
- засіб оцінювання пілот-каналу, призначений для одержання оцінки пілот-каналу на основі субканального пілот-сигналу,
- перший засіб виділення сигналу першого субканалу з зазначеного інформаційного сигналу,
- перший засіб оцінювання каналу, операційно з'єднаний з зазначеним першим засобом виділення і призначений для одержання оцінки першого каналу,
- об'єднувач оцінок каналів, операційно з'єднаний з зазначеним засобом оцінювання пілот-каналу і з зазначеним першим засобом оцінювання каналу і призначений для комбінування зазначеної оцінки пілот-каналу з зазначеною оцінкою першого каналу і одержання таким чином комбінованої оцінки каналу,
- другий засіб виділення сигналу другого субканалу з зазначеного інформаційного сигналу і
- перший модуль скалярного множення, операційно з'єднаний з зазначеним об'єднувачем оцінок каналів і з зазначеним другим засобом виділення і призначений для одержання потоку символів субканалу на основі зазначеного сигналу другого субканалу і зазначеної оцінки другого каналу.
2. Пристрій за п. 1, який відрізняється тим, що зазначений перший засіб виділення включає перший псевдошумовий згортувач, а зазначений другий засіб виділення включає другий псевдошумовий згортувач.
3. Пристрій за п. 1, який відрізняється тим, що зазначений засіб оцінювання пілот-каналу є оцінювачем пілот-каналу, призначеним для одержання зазначеної оцінки пілот-каналу на основі еталонного сигналу пілотного псевдошумового коду.
4. Пристрій за п. 1, який відрізняється тим, що зазначений засіб оцінювання пілот-каналу є оцінювачем пілот-каналу, призначеним для одержання зазначеної оцінки пілот-каналу на основі еталонного сигналу пілотного коду Уолша.
5. Пристрій за п. 4, який відрізняється тим, що зазначений пілотний код Уолша є комплексним, а зазначений оцінювач пілот-каналу включає комплексні міксери.
6. Пристрій за п. 1, який відрізняється тим, що зазначений перший засіб виділення є першим згортувачем Уолша, а зазначений другий засіб виділення є другим згортувачем Уолша.
7. Пристрій за п. 6, який відрізняється тим, що додатково включає псевдошумовий згортувач для формування і надсилання зазначеного інформаційного сигналу до зазначеного засобу оцінювання пілот-каналу, до зазначеного першого засобу виділення і до зазначеного другого засобу виділення.
8. Пристрій за п. 7, який відрізняється тим, що зазначений псевдошумовий згортувач є комплексним псевдошумовим згортувачем.
9. Пристрій за п. 1, який відрізняється тим, що зазначений об'єднувач оцінок каналів є суматором зважених середніх значень, який
помножує зазначену оцінку пілот-каналу на пілотний множник для одержання масштабованої оцінки пілот-каналу,
помножує зазначену оцінку першого каналу на перший множник для одержання масштабованої оцінки першого каналу і
складає зазначену масштабовану оцінку пілот-каналу з зазначеною масштабованою оцінкою першого каналу для одержання комбінованої оцінки каналу.
10. Пристрій за п. 9, який відрізняється тим, що відношення зазначеного пілотного множника до зазначеного першого множника приблизно дорівнює відношенню коефіцієнта підсилення при передачі зазначеного субканального пілот-сигналу до коефіцієнта підсилення при передачі зазначеного сигналу першого субканалу.
11. Пристрій за п. 9, який відрізняється тим, що зазначений засіб оцінювання пілот-каналу є пілотним фільтром.
12. Пристрій за п. 9, який відрізняється тим, що зазначений інформаційний сигнал включає композитний І-сигнал і композитний Q-сигнал, а зазначений засіб оцінювання пілот-каналу включає перший міксер для змішування зазначеного композитного І-сигналу з функцією Уолша і другий міксер для змішування композитного Q-сигналу з зазначеною функцією Уолша.
13. Пристрій за п. 12, який відрізняється тим, що зазначений засіб оцінювання пілот-каналу додатково включає перший фільтр видалення шуму для фільтрування вихідного сигналу зазначеного першого міксера і другий фільтр видалення шуму для фільтрування вихідного сигналу зазначеного другого міксера.
14. Пристрій за п. 8, який відрізняється тим, що зазначений засіб оцінювання пілот-каналу включає модуль затримки для синхронізації зазначеної оцінки пілот-каналу з зазначеною оцінкою першого каналу.
15. Пристрій за п. 1, який відрізняється тим, що зазначений перший засіб оцінювання каналу включає другий модуль скалярного множення, призначений для прийому зазначеної оцінки пілот-каналу і зазначеного сигналу першого субканалу і формування скалярної оцінки першого каналу.
16. Пристрій за п. 15, який відрізняється тим, що зазначений перший засіб оцінювання каналу додатково включає оцінювач каналу, призначений для прийому виходу зазначеного другого модуля скалярного множення і виходу зазначеного першого згортувача Уолша і формування зазначеної оцінки першого каналу.
17. Пристрій за п. 15, який відрізняється тим, що додатково включає:
- зворотний перемежувач, операційно з'єднаний з зазначеним другим модулем скалярного множення,
- декодер з попередньою корекцією помилок, операційно з'єднаний з зазначеним зворотним перемежувачем,
- кодер з попередньою корекцією помилок, операційно з'єднаний з зазначеним декодером з попередньою корекцією помилок,
- перемежувач, операційно з'єднаний з зазначеним кодером з попередньою корекцією помилок, і
- оцінювач каналу, операційно з'єднаний з зазначеним перемежувачем і з зазначеним першим засобом виділення.
18. Пристрій за п. 17, який відрізняється тим, що зазначений зворотний перемежувач є блочним зворотним перемежувачем, і зазначений перемежувач є блочним перемежувачем.
19. Пристрій за п. 17, який відрізняється тим, що зазначений зворотний перемежувач є зворотним перемежувачем з оберненням бітів, а зазначений перемежувач є перемежувачем з оберненням бітів.
20. Пристрій за п. 17, який відрізняється тим, що зазначений зворотний перемежувач є зворотним згортаючим перемежувачем, а зазначений перемежувач є згортаючим перемежувачем.
21. Пристрій за п. 17, який відрізняється тим, що зазначений зворотний перемежувач є зворотним турбоперемежувачем, а зазначений перемежувач є турбоперемежувачем.
22. Пристрій за п. 17, який відрізняється тим, що зазначений декодер з попередньою корекцією помилок є турбодекодером, а зазначений кодер з попередньою корекцією помилок є турбокодером.
23. Пристрій за п. 17, який відрізняється тим, що зазначений декодер з попередньою корекцією помилок є блочним декодером, а зазначений кодер з попередньою корекцією помилок є блочним кодером.
24. Пристрій за п. 17, який відрізняється тим, що зазначений декодер з попередньою корекцією помилок є матричним декодером, а зазначений кодер з попередньою корекцією помилок є матричним кодером.
25. Пристрій за п. 17, який відрізняється тим, що додатково включає керуючий процесор, операційно з'єднаний з зазначеним декодером з попередньою корекцією помилок і з зазначеним кодером з попередньою корекцією помилок і призначений для
прийому вільних від помилок символів від зазначеного декодера з попередньою корекцією помилок,
перевірки якості кадру і визначення бітової швидкості зазначених вільних від помилок символів,
формування інформації про бітову швидкість передачі і сигналу метрики якості кадру і
надсилання зазначеної інформації про бітову швидкість передачі кадру до зазначеного кодера з корекцією помилок.
26. Пристрій за п. 25, який відрізняється тим, що зазначений керуючий процесор додатково включає згладжувальний модуль для згладжування зазначеного сигналу метрики якості кадру.
27. Пристрій за п. 25, який відрізняється тим, що зазначений об'єднувач оцінок каналів є суматором зважених середніх значень, який
помножує зазначену оцінку пілот-каналу на пілотний множник для одержання масштабованої оцінки пілот-каналу,
помножує зазначену оцінку першого каналу на перший множник для одержання масштабованої оцінки першого каналу і
складає зазначену масштабовану оцінку пілот-каналу з зазначеною масштабованою оцінкою першого каналу для одержання зазначеної комбінованої оцінки каналу.
28. Пристрій за п. 26, який відрізняється тим, що зазначений керуючий процесор надсилає зазначену інформацію про бітову швидкість до зазначеного об'єднувача оцінок каналів, а зазначений об'єднувач оцінок каналів коригує відношення зазначеного пілотного множника до зазначеного першого множника, використовуючи для цього зазначену інформацію про бітову швидкість.
29. Пристрій за п. 26, який відрізняється тим, що зазначений керуючий процесор надсилає зазначений сигнал метрики якості кадру до зазначеного об'єднувача оцінок каналів, а зазначений об'єднувач оцінок каналів коригує відношення зазначеного пілотного множника до зазначеного першого множника, використовуючи для цього зазначений сигнал метрики якості кадру.
30. Пристрій за п. 26, який відрізняється тим, що зазначений керуючий процесор надсилає зазначену інформацію про бітову швидкість передачі і зазначений сигнал метрики якості кадру до зазначеного об'єднувача оцінок каналів, а зазначений об'єднувач оцінок каналів коригує відношення зазначеного пілотного множника до зазначеного першого множника, використовуючи для цього зазначену інформацію про бітову швидкість передачі і зазначений сигнал метрики якості кадру.
31. Спосіб декодування інформаційного сигналу, який включає операції:
- формування оцінки пілот-каналу з інформаційного сигналу на основі субканального пілот-сигналу,
- виділення сигналу першого субканалу з зазначеного інформаційного сигналу,
- формування оцінки першого каналу на основі зазначеного сигналу першого субканалу,
- об'єднання зазначеної оцінки пілот-каналу з зазначеною оцінкою першого каналу і одержання таким чином комбінованої оцінки каналу,
- виділення сигналу другого субканалу з зазначеного інформаційного сигналу і
- обчислення першого скалярного добутку зазначеної комбінованої оцінки каналу і зазначеного сигналу другого субканалу для формування потоку символів субканалу.
32. Спосіб за п. 31, який відрізняється тим, що зазначена операція виділення сигналу першого субканалу включає псевдошумове згортання першим канальним псевдошумовим кодом, а зазначена операція виділення сигналу другого субканалу включає псевдошумове згортання другим канальним псевдошумовим кодом.
33. Спосіб за п. 32, який відрізняється тим, що зазначена операція формування оцінки пілот-каналу включає псевдошумове згортання пілотним канальним псевдошумовим кодом.
34. Спосіб за п. 31, який відрізняється тим, що зазначена операція формування оцінки пілот-каналу включає фільтрування зазначеного інформаційного сигналу без змішування зазначеного інформаційного сигналу з пілотним кодом Уолша.
35. Спосіб за п. 31, який відрізняється тим, що зазначена операція формування оцінки пілот-каналу включає згортання Уолша пілотним кодом Уолша.
36. Спосіб за п. 31, який відрізняється тим, що зазначена операція виділення сигналу першого субканалу включає згортання першим кодом Уолша, а зазначена операція виділення сигналу другого субканалу включає згортання Уолша другим кодом Уолша.
37. Спосіб за п. 36, який відрізняється тим, що зазначені перший і другий коди Уолша є комплексними, а зазначені перша і друга операції згортання є операціями комплексного згортання Уолша.
38. Спосіб за п. 36, який відрізняється тим, що додатково включає операцію згортання псевдошумовим кодом сигналу, перетвореного з зниженням частоти, для формування зазначеного інформаційного сигналу.
39. Спосіб за п. 38, який відрізняється тим, що згортання псевдошумовим кодом є комплексним.
40. Спосіб за п. 39, який відрізняється тим, що зазначена операція формування оцінки пілот-каналу включає синхронізацію зазначеної оцінки пілот-каналу з зазначеною оцінкою першого каналу.
41. Спосіб за п. 31, який відрізняється тим, що зазначена операція об'єднання включає:
- множення зазначеної оцінки пілот-каналу на пілотний множник для одержання масштабованої оцінки пілот-каналу,
- множення зазначеної оцінки першого каналу на перший множник для одержання масштабованої оцінки першого каналу і
- складання зазначеної масштабованої оцінки пілот-каналу з зазначеною масштабованою оцінкою першого каналу для одержання зазначеної комбінованої оцінки каналу.
42. Спосіб за п. 41, який відрізняється тим, що відношення зазначеного пілотного множника до зазначеного першого множника приблизно дорівнює відношенню коефіцієнта підсилення при передачі зазначеного субканального пілот-сигналу до коефіцієнта підсилення при передачі зазначеного сигналу першого субканалу.
43. Спосіб за п. 41, який відрізняється тим, що зазначена операція формування оцінки пілот-каналу включає фільтрування зазначеного інформаційного сигналу для одержання зазначеної оцінки пілот-каналу.
44. Спосіб за п. 41, який відрізняється тим, що зазначена операція формування оцінки пілот-каналу включає:
- змішування компоненти І зазначеного інформаційного сигналу з пілотним кодом Уолша для одержання першого згорнутого І-сигналу,
- змішування компоненти Q зазначеного інформаційного сигналу з пілотним кодом Уолша для одержання першого згорнутого Q-сигналу,
- фільтрування зазначеного першого згорнутого І-сигналу для одержання компоненти І зазначеної оцінки пілот-каналу і
- фільтрування зазначеного першого згорнутого Q-сигналу для одержання компоненти Q зазначеної оцінки пілот-каналу.
45. Спосіб за п. 41, який відрізняється тим, що зазначена операція формування оцінки пілот-каналу включає:
- множення зазначеного інформаційного сигналу на комплексний пілотний код Уолша для одержання першого комплексно згорнутого сигналу,
- фільтрування компоненти І зазначеного першого комплексно згорнутого сигналу для одержання компоненти І зазначеної оцінки пілот-каналу і
- фільтрування компоненти Q зазначеного першого комплексно згорнутого сигналу для одержання компоненти Q зазначеної оцінки пілот-каналу.
46. Спосіб за п. 31, який відрізняється тим, що зазначена операція формування оцінки першого каналу включає:
- друге скалярне множення зазначеної оцінки пілот-каналу на зазначений сигнал першого субканалу для одержання скалярного сигналу першого каналу,
- затримку зазначеного сигналу першого субканалу для одержання затриманого сигналу першого субканалу, синхронізованого з зазначеним скалярним сигналом першого каналу, і
- оцінювання каналу через зазначений затриманий сигнал першого субканалу з використанням зазначеного скалярного сигналу першого каналу як еталонного для одержання зазначеної оцінки першого каналу.
47. Спосіб за п. 31, який відрізняється тим, що зазначена операція формування оцінки першого каналу включає:
- друге скалярне множення зазначеної оцінки пілот-каналу на зазначений сигнал першого субканалу для одержання скалярного сигналу першого каналу,
- зворотне перемежування зазначеного скалярного сигналу першого каналу згідно з форматом зворотного перемежування для одержання відновленого сигналу першого каналу,
- декодування з попередньою корекцією помилок зазначеного відновленого сигналу першого каналу згідно з форматом попередньої корекції помилок для одержання вільного від помилок декодованого сигналу першого каналу,
- кодування з попередньою корекцією помилок зазначеного вільного від помилок декодованого сигналу першого каналу згідно з форматом попередньої корекції помилок для одержання вільного від помилок кодованого сигналу першого каналу,
- перемежування зазначеного скалярного сигналу першого каналу згідно з форматом перемежування для одержання оцінки сигналу першого субканалу,
- затримання зазначеного сигналу першого субканалу для одержання затриманого сигналу першого субканалу, синхронізованого з зазначеною оцінкою сигналу першого субканалу, і
- оцінювання каналу на основі зазначеного затриманого сигналу першого субканалу і зазначеної оцінки сигналу першого субканалу для одержання зазначеної оцінки першого каналу.
48. Спосіб за п. 47, який відрізняється тим, що зазначений формат зворотного перемежування і зазначений формат перемежування є блочними форматами.
49. Спосіб за п. 47, який відрізняється тим, що зазначений формат зворотного перемежування і зазначений формат перемежування є форматами обернення бітів.
50. Спосіб за п. 47, який відрізняється тим, що зазначений формат зворотного перемежування і зазначений формат перемежування є згортаючими форматами.
51. Спосіб за п. 47, який відрізняється тим, що зазначений формат зворотного перемежування і зазначений формат перемежування є форматами турбоперемежування.
52. Спосіб за п. 47, який відрізняється тим, що зазначений формат попередньої корекції помилок є форматом турбокодування.
53. Спосіб за п. 47, який відрізняється тим, що зазначений формат попередньої корекції помилок є блочним форматом попередньої корекції помилок.
54. Спосіб за п. 47, який відрізняється тим, що зазначений формат попередньої корекції помилок є згортаючим форматом попередньої корекції помилок.
55. Спосіб за п. 47, який відрізняється тим, що додатково включає операцію перевірки якості кадру і визначення бітової швидкості передачі зазначеного сигналу першого каналу, декодованого з попередньою корекцією помилок, для одержання інформації про бітову швидкість передачі кадру і сигналу метрики якості кадру, причому бітова швидкість передачі кадру, що використовується при кодуванні з попередньою корекцією помилок, визначається зазначеною інформацією про бітову швидкість передачі кадру.
56. Спосіб за п. 55, який відрізняється тим, що зазначена операція перевірки якості кадру включає операцію згладжування зазначеного сигналу метрики якості кадру.
57. Спосіб за п. 55, який відрізняється тим, що зазначена операція об'єднання включає:
- формування пілотного множника і першого множника,
- множення зазначеної оцінки пілот-каналу на пілотний множник для одержання масштабованої оцінки пілот-каналу,
- множення зазначеної оцінки першого каналу на перший множник для одержання масштабованої оцінки першого каналу і
- додавання зазначеної масштабованої оцінки пілот-каналу до зазначеної масштабованої оцінки першого каналу для одержання зазначеної комбінованої оцінки каналу.
58. Спосіб за п. 56, який відрізняється тим, що відношення пілотного множника до першого множника коригується на основі зазначеної інформації про бітову швидкість передачі кадру.
59. Спосіб за п. 56, який відрізняється тим, що відношення пілотного множника до першого множника коригується на основі зазначеного сигналу метрики якості кадру.
60. Пристрій для передачі інформаційного сигналу, який включає:
- засіб формування сигналу пілот-каналу,
- перший засіб кодування з попередньою корекцією помилок, призначений для прийому сигналу першого субканалу і формування першого сигналу, кодованого з попередньою корекцією помилок,
- перший засіб перемежування, операційно з'єднаний з зазначеним першим засобом кодування з попередньою корекцією помилок і призначений для прийому зазначеного першого сигналу, кодованого з попередньою корекцією помилок, і формування першого перемежованого сигналу,
- перший засіб каналізації, операційно з'єднаний з зазначеним першим засобом перемежування і призначений для прийому зазначеного першого перемежованого сигналу і формування першого каналізованого сигналу,
- перший контролер відносного коефіцієнта підсилення, операційно з'єднаний з зазначеним першим засобом каналізації і призначений для прийому зазначеного першого каналізованого сигналу і формування сигналу першого каналу з контролем коефіцієнта підсилення,
- другий засіб кодування з попередньою корекцією помилок, призначений для прийому сигналу другого субканалу і формування другого сигналу, кодованого з попередньою корекцією помилок,
- другий засіб перемежування, операційно з'єднаний з зазначеним другим засобом кодування з попередньою корекцією помилок і призначений для прийому зазначеного другого сигналу, кодованого з попередньою корекцією помилок, і формування другого перемежованого сигналу,
- другий засіб каналізації, операційно з'єднаний з зазначеним другим засобом перемежування і призначений для прийому зазначеного другого перемежованого сигналу і формування другого каналізованого сигналу,
- другий контролер відносного коефіцієнта підсилення, операційно з'єднаний з зазначеним другим засобом перемежування і призначений для прийому зазначеного другого каналізованого сигналу і формування сигналу другого каналу з контролем коефіцієнта підсилення, і
- процесор керування коефіцієнтами підсилення, операційно з'єднаний з зазначеними першим і другим контролерами відносного коефіцієнта підсилення і призначений для формування і передачі першого сигналу керування коефіцієнтом підсилення до першого контролера відносного коефіцієнта підсилення і для формування і передачі другого сигналу керування коефіцієнтом підсилення до другого контролера відносного коефіцієнта підсилення, причому зазначений перший сигнал керування коефіцієнтом підсилення коригується згідно з зазначеним другим сигналом керування коефіцієнтом підсилення.
61. Пристрій за п. 60, який відрізняється тим, що зазначений засіб формування сигналу пілот-каналу включає контролер пілотного коефіцієнта підсилення, операційно з'єднаний з зазначеним процесором керування коефіцієнтами підсилення і призначений для коригування коефіцієнта підсилення зазначеного сигналу пілот-каналу згідно з сигналом керування пілотним коефіцієнтом підсилення, прийнятим від зазначеного процесора керування коефіцієнтами підсилення.
62. Пристрій за п. 61, який відрізняється тим, що зазначений процесор керування коефіцієнтами підсилення коригує зазначений сигнал керування пілотним коефіцієнтом підсилення до:
першого значення пілотного коефіцієнта підсилення, якщо ефективний коефіцієнт підсилення при передачі зазначеного сигналу першого каналу і ефективний коефіцієнт підсилення при передачі зазначеного сигналу другого каналу обидва дорівнюють 0;
другого значення пілотного коефіцієнта підсилення, якщо ефективний коефіцієнт підсилення при передачі зазначеного сигналу першого каналу дорівнює 0, а ефективний коефіцієнт підсилення при передачі зазначеного сигналу другого каналу є більшим за 0, і
третього значення пілотного коефіцієнта підсилення, якщо ефективний коефіцієнт підсилення при передачі зазначеного сигналу першого каналу і ефективний коефіцієнт підсилення при передачі зазначеного сигналу другого каналу обидва є більшими за 0.
63. Пристрій за п. 61, який відрізняється тим, що зазначений процесор керування коефіцієнтами підсилення коригує зазначений сигнал керування пілотним коефіцієнтом підсилення на основі бітової швидкості передачі даних у зазначеному другому каналі.
64. Пристрій за п. 60, який відрізняється тим, що зазначений процесор керування коефіцієнтами підсилення коригує зазначений перший сигнал керування коефіцієнтом підсилення на основі бітової швидкості передачі даних у зазначеному другому каналі.
65. Пристрій за п. 60, який відрізняється тим, що зазначений процесор керування коефіцієнтами підсилення коригує зазначений перший сигнал керування коефіцієнтом підсилення на основі ефективного коефіцієнта підсилення при передачі зазначеного сигналу другого каналу.
66. Пристрій за п. 60, який відрізняється тим, що зазначений перший засіб кодування з попередньою корекцією помилок є першим турбокодером, а зазначений другий засіб кодування з попередньою корекцією помилок є другим турбокодером.
67. Пристрій за п. 60, який відрізняється тим, що зазначений перший засіб кодування з попередньою корекцією помилок є першим згортаючим кодером, а зазначений другий засіб кодування з попередньою корекцією помилок є другим згортаючим кодером.
68. Пристрій за п. 60, який відрізняється тим, що зазначений перший засіб кодування з попередньою корекцією помилок є першим блочним кодером, а зазначений другий засіб кодування з попередньою корекцією помилок є другим блочним кодером.
69. Пристрій за п. 60, який відрізняється тим, що зазначений перший засіб перемежування є першим блочним перемежувачем, а зазначений другий засіб перемежування є другим блочним перемежувачем.
70. Пристрій за п. 60, який відрізняється тим, що зазначений перший засіб перемежування є першим перемежувачем з оберненням бітів, а зазначений другий засіб перемежування є другим перемежувачем з оберненням бітів.
71. Пристрій за п. 60, який відрізняється тим, що зазначений перший засіб перемежування є першим згортаючим перемежувачем, а зазначений другий засіб перемежування є другим згортаючим перемежувачем.
72. Пристрій за п. 60, який відрізняється тим, що зазначений перший засіб перемежування є першим турбоперемежувачем, а зазначений другий засіб перемежування є другим турбоперемежувачем.
73. Пристрій за п. 60, який відрізняється тим, що
зазначений перший засіб каналізації використовує псевдошумову каналізацію для розширення першого каналізованого сигналу першим псевдошумовим канальним кодом і
зазначений другий засіб каналізації використовує псевдошумову каналізацію для розширення другого каналізованого сигналу другим псевдошумовим канальним кодом.
74. Пристрій за п. 73, який відрізняється тим, що
зазначена перша псевдошумова каналізація є комплексною псевдошумовою каналізацією,
перший псевдошумовий канальний код є першим комплексним псевдошумовим канальним кодом,
зазначена друга псевдошумова каналізація є комплексною псевдошумовою каналізацією,
другий псевдошумовий канальний код є другим комплексним псевдошумовим канальним кодом.
75. Пристрій за п. 60, який відрізняється тим, що
зазначений засіб формування пілот-каналу використовує ортогональний код пілот-каналу,
зазначений перший засіб каналізації використовує ортогональну каналізацію для розширення першого каналізованого сигналу першим ортогональним канальним кодом і
зазначений другий засіб каналізації використовує ортогональну каналізацію для розширення другого каналізованого сигналу другим ортогональним канальним кодом.
76. Пристрій за п. 60, який відрізняється тим, що
зазначений перший засіб каналізації включає перший розширювач Уолша для розширення першого перемежованого сигналу першим канальним кодом Уолша і
зазначений другий засіб каналізації включає другий розширювач Уолша для розширення другого перемежованого сигналу другим канальним кодом Уолша.
77. Пристрій за п. 76, який відрізняється тим, що зазначений сигнал пілот-каналу є пілотним кодом Уолша.
78. Пристрій за п. 76, який відрізняється тим, що додатково включає псевдошумовий розширювач, операційно з'єднаний з зазначеним засобом формування сигналу пілот-каналу, з зазначеним першим контролером відносного коефіцієнта підсилення і з зазначеним другим контролером відносного коефіцієнта підсилення і призначений для псевдошумового розширення зазначеного сигналу пілот-каналу і зазначених сигналів першого і другого каналів, одержаних з контролем коефіцієнта підсилення.
79. Пристрій за п. 78, який відрізняється тим, що зазначений псевдошумовий розширювач є комплексним псевдошумовим розширювачем, призначеним для комплексного псевдошумового розширення зазначеного сигналу пілот-каналу і зазначених сигналів першого і другого каналів, одержаних з контролем коефіцієнта підсилення.
80. Пристрій за п. 78, який відрізняється тим, що зазначений псевдошумовий розширювач додатково повертає фази зазначених сигналів першого і другого каналів, одержаних з контролем коефіцієнта підсилення, на 90° відносно фази зазначеного сигналу пілот-каналу.
81. Спосіб передачі інформаційного сигналу, який включає операції:
- формування сигналу пілот-каналу,
- кодування з попередньою корекцією помилок сигналу першого субканалу згідно з форматом кодування з попередньою корекцією помилок для формування першого кодованого, вільного від помилок, сигналу,
- перемежування зазначеного першого кодованого, вільного від помилок, сигналу згідно з форматом перемежування для формування першого перемежованого сигналу,
- каналізації зазначеного першого перемежованого сигналу для формування першого каналізованого сигналу,
- кодування з попередньою корекцією помилок сигналу другого субканалу згідно з форматом кодування з попередньою корекцією помилок для формування другого кодованого, вільного від помилок, сигналу,
- перемежування зазначеного другого кодованого, вільного від помилок, сигналу згідно з форматом перемежування для формування другого перемежованого сигналу,
- каналізації зазначеного другого перемежованого сигналу для формування другого каналізованого сигналу,
- визначення коефіцієнта підсилення першого каналу на основі зазначених сигналу першого субканалу і сигналу другого субканалу,
- підсилення зазначеного першого каналізованого сигналу згідно з зазначеним коефіцієнтом підсилення першого каналу для одержання сигналу першого каналу з контролем коефіцієнта підсилення,
- підсилення зазначеного другого каналізованого сигналу згідно з зазначеним коефіцієнтом підсилення другого каналу для одержання сигналу другого каналу з контролем коефіцієнта підсилення,
- злиття зазначеного сигналу пілот-каналу, зазначеного сигналу першого каналу, одержаного з контролем коефіцієнтом підсилення, і зазначеного сигналу другого каналу, одержаного з контролем коефіцієнтом підсилення, для формування зазначеного сигналу пілот-каналу.
82. Спосіб за п. 81, який відрізняється тим, що зазначена операція формування сигналу пілот-каналу включає операцію застосування пілотного коефіцієнта підсилення до сигналу пілот-каналу, сформованого з постійним коефіцієнтом підсилення.
83. Спосіб за п. 82, який відрізняється тим, що значення зазначеного пілотного коефіцієнта підсилення встановлюється рівним:
першому значенню пілотного коефіцієнта підсилення, якщо ефективний коефіцієнт підсилення при передачі зазначеного сигналу першого каналу і ефективний коефіцієнт підсилення при передачі зазначеного сигналу другого каналу обидва дорівнюють 0;
другому значенню пілотного коефіцієнта підсилення, якщо ефективний коефіцієнт підсилення при передачі зазначеного сигналу першого каналу дорівнює 0, а ефективний коефіцієнт підсилення при передачі зазначеного сигналу другого каналу є більшим за 0; і
третьому значенню пілотного коефіцієнта підсилення, якщо ефективний коефіцієнт підсилення при передачі зазначеного сигналу першого каналу і ефективний коефіцієнт підсилення при передачі зазначеного сигналу другого каналу обидва є більшими за 0.
84. Спосіб за п. 82, який відрізняється тим, що додатково включає операцію корекції зазначеного пілотного коефіцієнта підсилення на основі бітової швидкості передачі сигналу зазначеного другого субканалу.
85. Спосіб за п. 81, який відрізняється тим, що додатково включає операцію корекції коефіцієнта підсилення зазначеного першого каналу на основі бітової швидкості передачі сигналу зазначеного другого субканалу.
86. Спосіб за п. 85, який відрізняється тим, що зазначений формат кодування з попередньою корекцією помилок є форматом турбокоду.
87. Спосіб за п. 85, який відрізняється тим, що зазначений формат кодування з попередньою корекцією помилок є згортаючим форматом.
88. Спосіб за п. 85, який відрізняється тим, що зазначений формат кодування з попередньою корекцією помилок є блочним форматом.
89. Спосіб за п. 85, який відрізняється тим, що зазначений формат перемежування є блочним форматом.
90. Спосіб за п. 85, який відрізняється тим, що зазначений формат перемежування є форматом обернення бітів.
91. Спосіб за п. 85, який відрізняється тим, що зазначений формат перемежування є згортаючим форматом.
92. Спосіб за п. 85, який відрізняється тим, що зазначений формат перемежування є форматом турбоперемежування.
93. Спосіб за п. 85, який відрізняється тим, що зазначена операція каналізації зазначеного першого перемежованого сигналу включає множення зазначеного першого перемежованого сигналу на перший псевдошумовий канальний код, а зазначена операція каналізації зазначеного другого перемежованого сигналу включає множення зазначеного другого перемежованого сигналу на другий псевдошумовий канальний код.
94. Спосіб за п. 93, який відрізняється тим, що зазначений сигнал пілот-каналу є пілотним псевдошумовим канальним кодом.
95. Спосіб за п. 85, який відрізняється тим, що зазначений сигнал пілот-каналу є пілотним канальним кодом Уолша, зазначена операція каналізації зазначеного першого перемежованого сигналу включає множення зазначеного першого перемежованого сигналу на перший канальний код Уолша, і
зазначена операція каналізації зазначеного другого перемежованого сигналу включає множення зазначеного другого перемежованого сигналу на другий канальний код Уолша.
96. Спосіб за п. 95, який відрізняється тим, що зазначений пілотний канальний код Уолша є чисто нульовим кодом Уолша.
97. Спосіб за п. 95, який відрізняється тим, що додатково включає операцію псевдошумового розширення, яка передбачає псевдошумове розширення зазначеного сигналу пілот-каналу, зазначеного сигналу першого каналу, одержаного з контролем коефіцієнта підсилення, і зазначеного сигналу другого каналу, одержаного з контролем коефіцієнта підсилення, для формування розширеного псевдошумом інформаційного сигналу.
98. Спосіб за п. 97, який відрізняється тим, що зазначене псевдошумове розширення є комплексним.
99. Спосіб за п. 97, який відрізняється тим, що додатково включає операцію повертання фази сигналу пілот-каналу на 90° відносно фази зазначених сигналів першого і другого каналів, одержаних з контролем коефіцієнта підсилення, у зазначеному розширеному псевдошумом інформаційному сигналі.
Додаткова інформація
Назва патенту англійськоюDevice for receiving an information signal and the method for decoding the signal; device and method for transmitting an information signal
Автори англійськоюLing Fuyung
Назва патенту російськоюУстройство для приема информационных сигналов и способ декодирования сигналов; устройство и способ передачи информационных сигналов
Автори російськоюЛинг Фуюнг
МПК / Мітки
МПК: H04L 25/02, H04B 1/707, H04B 7/005
Мітки: інформаційного, декодування, спосіб, передачі, сигналу, пристрій, прийому
Код посилання
<a href="https://ua.patents.su/6-64029-pristrijj-dlya-prijjomu-informacijjnogo-signalu-i-sposib-jjogo-dekoduvannya-ta-pristrijj-dlya-peredachi-informacijjnogo-signalu-i-sposib-jjogo-peredachi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для прийому інформаційного сигналу і спосіб його декодування та пристрій для передачі інформаційного сигналу і спосіб його передачі</a>
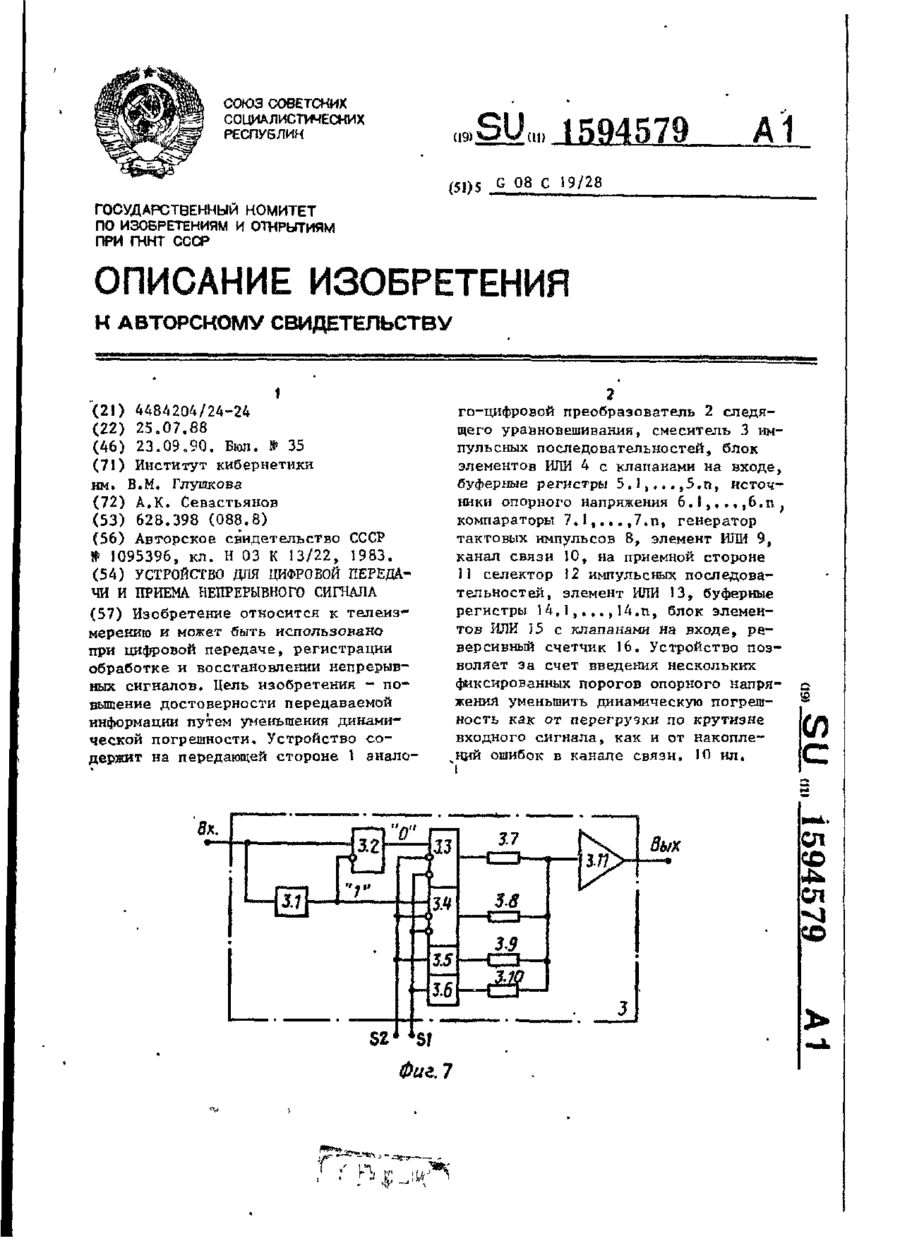
Пристрій для цифрової передачі та прийому неперервного сигналу
Номер патенту: 14070
Опубліковано: 25.04.1997
Автор: Севастьянов Анатолій Костянтинович
МПК: G08C 19/28
Мітки: прийому, сигналу, цифрової, неперервного, передачі, пристрій
Формула / Реферат:
Устройство для цифровой передачи и приема непрерывного сигнала, содержащее на передающей стороне первый источник опорного напряжения, выход которого подключен к первому информационному входу первого компаратора, второй информационный вход которого объединен с информационным входом аналого-цифрового преобразователя и является входом устройства, генератор импульсов, выход которого подключен к тактовому входу первого компаратора и...
Спосіб виділення тактового синхросигналу з кореляційно кодованого інформаційного сигналу та пристрій для його здійснення
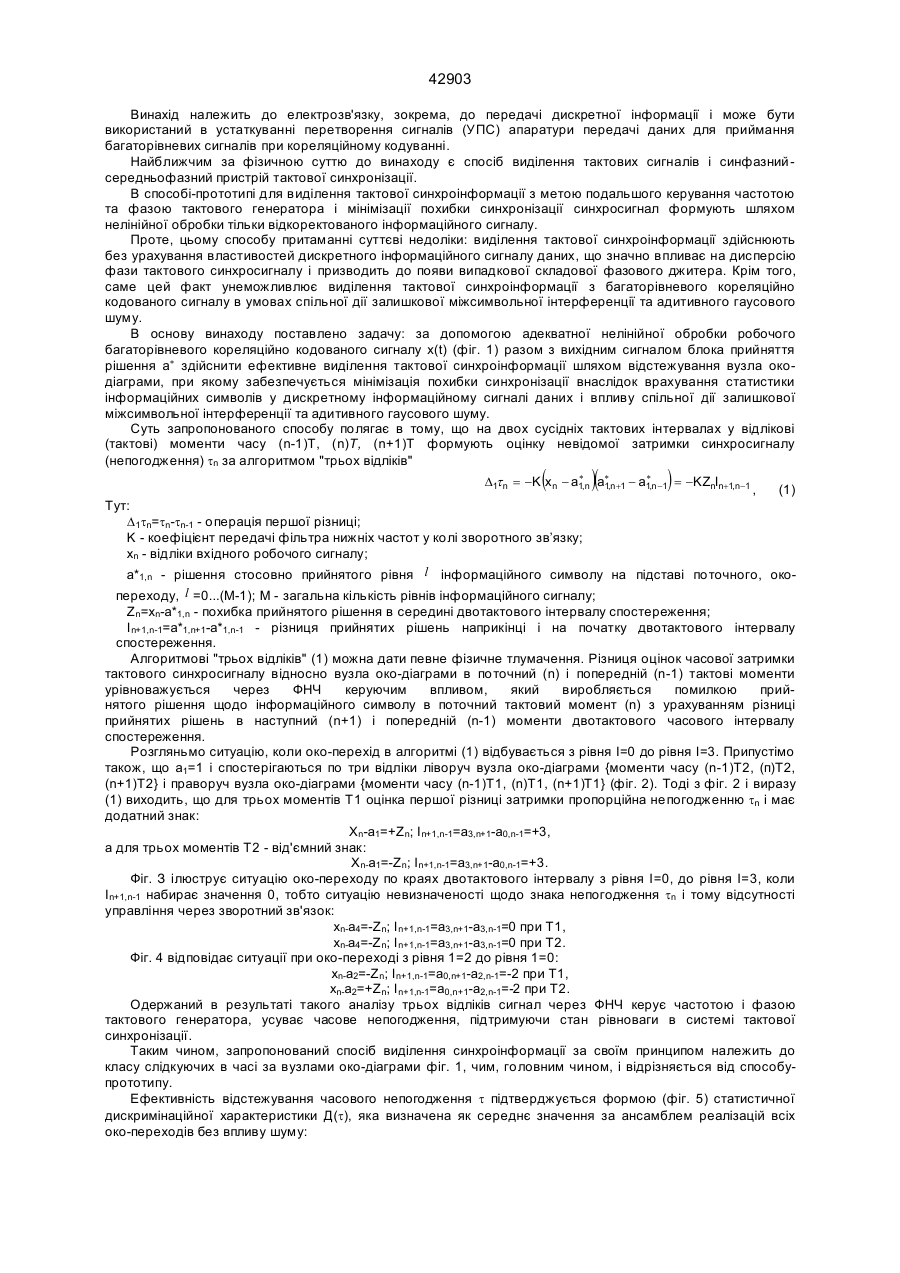
Номер патенту: 42903
Опубліковано: 15.11.2001
Автори: Пантелєєв Віктор Володимирович, Гаврилюк Марко Савелійович, Ланько Анатолій Анатолійович
Мітки: інформаційного, спосіб, здійснення, виділення, сигналу, тактового, синхросигналу, пристрій, кодованого, кореляційної
Формула / Реферат:
1. Спосіб виділення тактового синхросигналу з кореляційно кодового інформаційного сигналу, який полягає в тому, що тактовий синхросигнал формують шляхом нелінійної обробки відкоректованого інформаційного сигналу, який відрізняється тим, що значення і знак тактового непогодження визначають на двотактному інтервалі безпосередньо з поточних око-переходів і використовують цю інформацію через зворотний зв'язок за прийнятим рішенням для відстеження...
Спосіб оптичного запису інформаційного сигналу та пристрій для його здійснення
Номер патенту: 27217
Опубліковано: 15.08.2000
Автори: Ван ден Ванде Паулус Крістіанус Марія, Хоевен Петрус Крістіанус Йоханнус
МПК: G11B 27/00
Мітки: здійснення, пристрій, сигналу, спосіб, запису, інформаційного, оптичного
Формула / Реферат:
(57)1 Способ оптической записи информационного сигнала, заключающийся в формировании модулированного сигнала, состоящего из сигналов с временным кодированием, показывающих временное расположение частей информации и перемежающих сигналы синхронизации во времени, ив записи полученного сигнала при помощи оптической головки на носителе оптической записи, имеющем подложку с осажденным на ней записываемым слоем и серводорожкой, образованной...
Безпроводовий передавач (варіанти), канал зв’язку (варіанти) і спосіб модулювання інформаційного сигналу (варіанти)
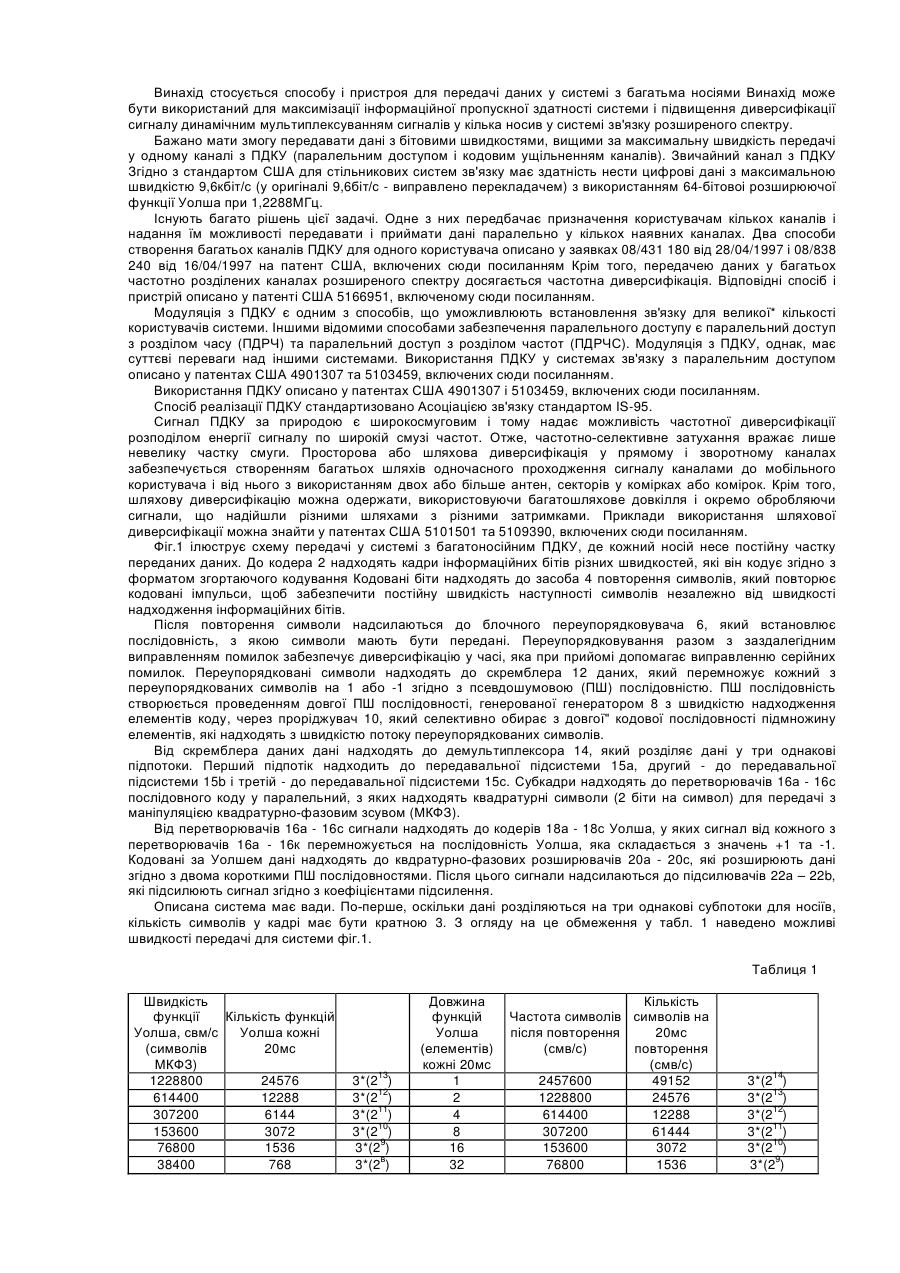
Номер патенту: 62980
Опубліковано: 15.01.2004
Автор: Джоу Ю-Чен
МПК: H04J 11/00, H04L 5/02, H04L 27/26, H04J 13/02, H04L 25/03
Мітки: модулювання, сигналу, безпроводовій, зв'язку, спосіб, канал, передавач, варіанти, інформаційного
Формула / Реферат:
1. Безпроводовий передавач, який має: кодер для кодування набору інформаційних біт для створення сукупності кодових символів з швидкістю передачі даних; демультиплексор для створення зазначеної сукупності кодових символів у першій і другій підгрупах кодових символів, які мають різні швидкості кодових символів, для першого і другого модуляторів, причому зазначена швидкість передачі даних дорівнює комбінованим зазначеним різним швидкостям...
Пристрій для декодування сигналу інфрачервоного випромінювання
Номер патенту: 38407
Опубліковано: 15.05.2001
Автор: Чорній Роман Іванович
МПК: H03M 11/00, G05D 27/02
Мітки: пристрій, інфрачервоного, декодування, випромінювання, сигналу
Формула / Реферат:
1. Пристрій для декодування сигналу інфрачервоного випромінювання, що містить приймач інфрачервоного випромінювання, який відрізняється тим, що в нього введено формувач імпульсу, схему зняття сигналу “СКИДАННЯ”, цифровий пристрій послідовністного типу та комбінаційну схему, причому вихід приймача з'єднаний із входом формувача імпульсу, вихід формувача імпульсу з'єднаний із входом схеми зняття сигналу “СКИДАННЯ” входом синхронізації цифрового...
Попередній патент: Силовий агрегат ліщука
Наступний патент: Масажер
Випадковий патент: Пристрій для відбору зразків грунту