Канал вимірювання кутових швидкостей літальних апаратів для лвс полігонного випробувального комплексу
Номер патенту: 75281
Опубліковано: 26.11.2012
Автори: Орлов Сергій Володимирович, Рондін Юрій Петрович, Сачук Ігор Іванович, Коломійцев Олексій Володимирович, Храпчинський Василь Олегович, Альошин Геннадій Васильович, Очкуренко Олександр Вікторович, Луковський Олег Ярославович, Коваль Володимир Валерійович, Чумак Борис Олександрович
Формула / Реферат
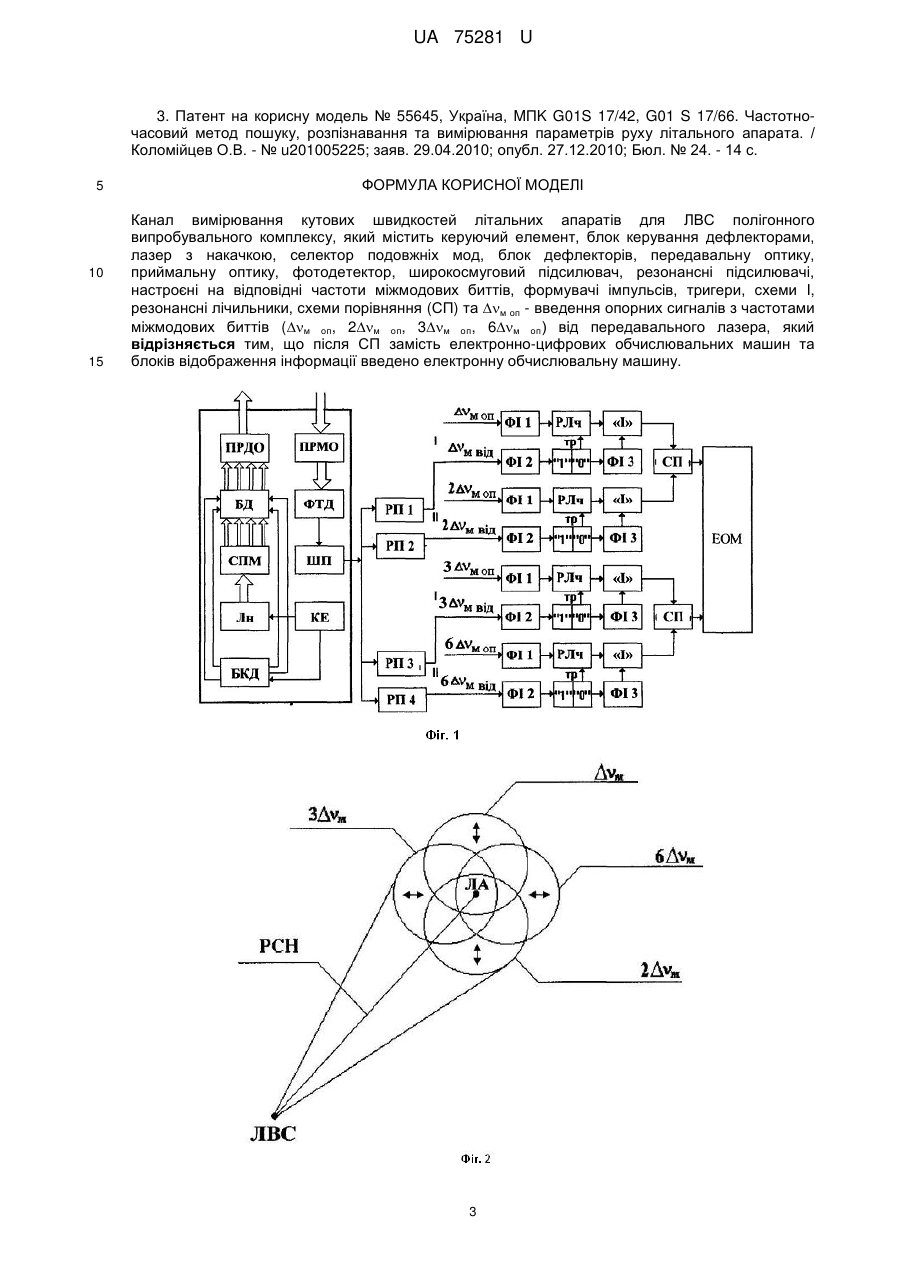
Канал вимірювання кутових швидкостей літальних апаратів для ЛВС полігонного випробувального комплексу, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми I, резонансні лічильники, схеми порівняння (СП) та ∆nм оп - введення опорних сигналів з частотами міжмодових биттів (∆nм оп, 2∆nм оп, 3∆nм оп, 6∆nм оп) від передавального лазера, який відрізняється тим, що після СП замість електронно-цифрових обчислювальних машин та блоків відображення інформації введено електронну обчислювальну машину.
Текст
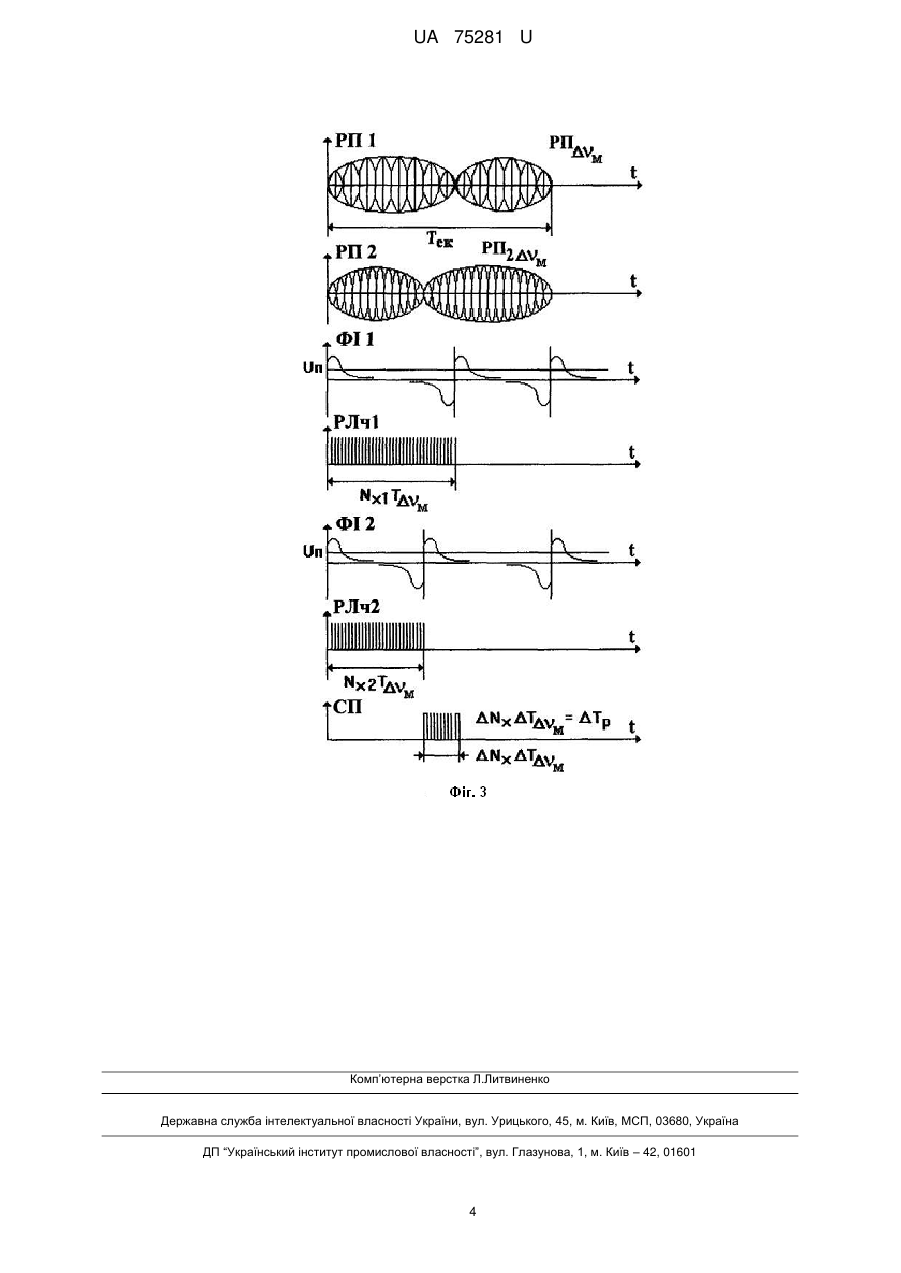
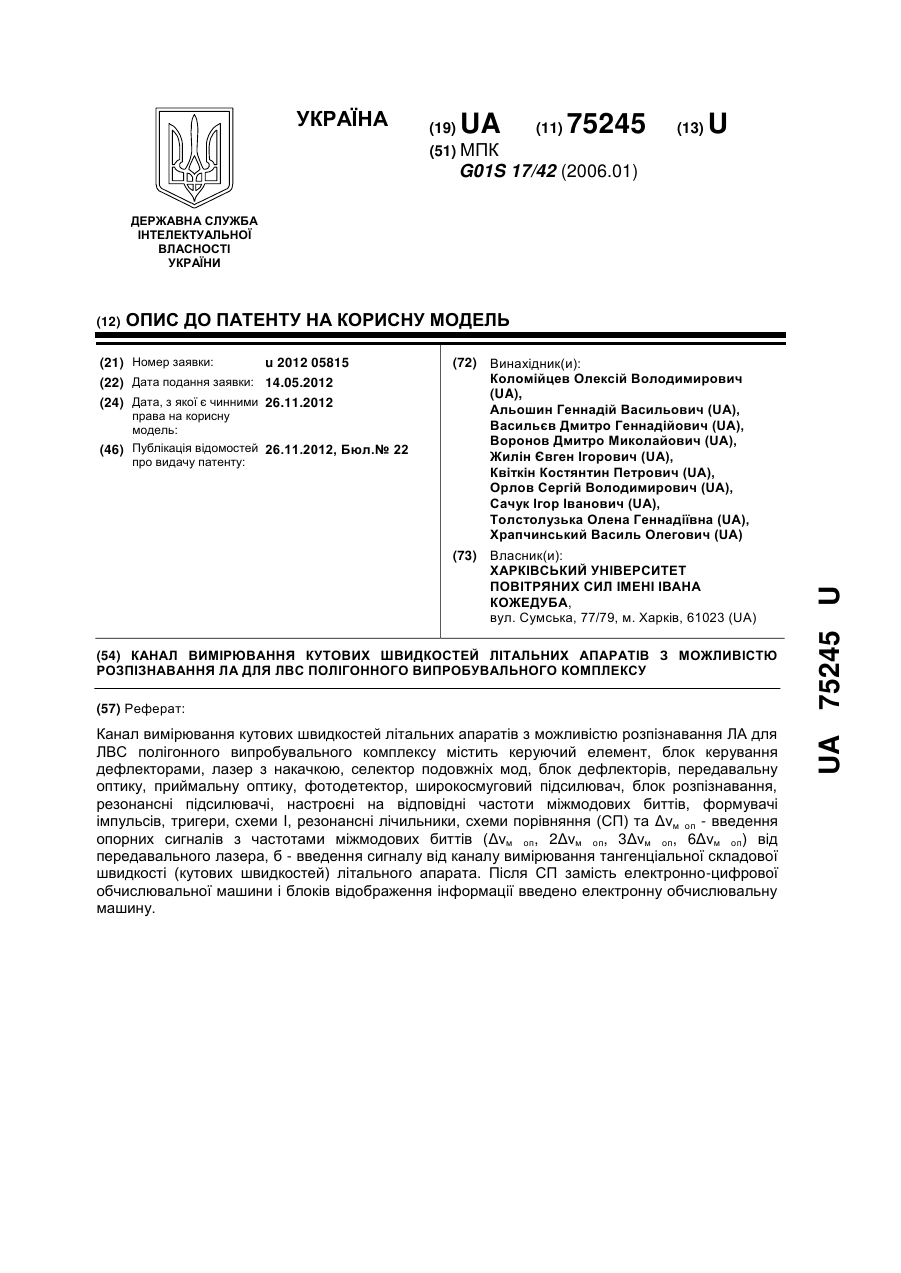
Реферат: Канал вимірювання кутових швидкостей літальних апаратів для ЛВС полігонного випробувального комплексу містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми I, резонансні лічильники, схеми порівняння (СП) та ∆м оп - введення опорних сигналів з частотами міжмодових биттів (∆м оп, 2∆м оп, 3∆м оп, 6∆м оп) від передавального лазера. Після СП замість електронно-цифрових обчислювальних машин та блоків відображення інформації введено електронну обчислювальну машину. UA 75281 U (12) UA 75281 U UA 75281 U 5 10 15 20 25 30 35 40 45 50 55 Запропонована корисна модель належить до галузі електрозв'язку і може бути використана для побудови передавальної частки лазерної вимірювальної системи (ЛВС) з частотно-часовим методом (ЧЧМ) пошуку, розпізнавання та вимірювання параметрів руху літального апарата (ЛА). Відома "Система автоматичного супроводження літального апарата за напрямком (АСН) на багатомодових лазерах" [1], яка містить послідовно з'єднанні лазер з блоком лазерної накачки (Лн), селектор подовжніх мод (СПМ), передавальну оптику (ПРДО), приймальну оптику (ПРМО), фотодетектор (ФТД), резонансні підсилювачі (РП), схеми порівняння (СП), пристрій сигналу похибки (ПСП), виконавчі механізми (ВМ). Недоліками відомої системи є те, що вона не вимірює кутову швидкість ЛА, не використовує цю інформацію для оптимальної фільтрації слабих сигналів, відбитих від ЛА з великої дальності, тобто для підвищення стійкості (астатизму) каналу АСН. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є "Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу вимірювання" [2], який містить керуючий елемент (КЕ), блок керування дефлекторами (БКД), лазер з накачкою (Лн), селектор подовжніх мод, блок дефлекторів (БД), передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач (ПШ), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів (ФІ), тригери ("1"|"0"), схеми І, резонансні лічильники (РЛч), схеми порівняння (СП), електронно-цифрові обчислювальні машини (ЕЦОМ) та блоки відображення інформації (БВІ), ∆M оп - введення опорних сигналів з частотами міжмодових биттів (∆м оп, 2∆м оп, 3∆м оп, 6∆м оп) від передавального лазера. Недоліком каналу-прототипу є те, що він не забезпечує збереження інформації, яка оброблена під час проведення випробувань ЛА. В основу корисної моделі поставлена задача створити канал вимірювання кутових швидкостей літальних апаратів для ЛВС полігонного випробувального комплексу, який дозволить здійснювати високоточне вимірювання кутових швидкостей ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту та збереження інформації, яка оброблена під час проведення випробувань ЛА. Поставлена задача вирішується за рахунок того, що у канал-прототип, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми І, резонансні лічильники, схеми порівняння, електронноцифрові обчислювальні машини та блоки відображення інформації, ∆м оп - введення опорних сигналів з частотами міжмодових биттів (∆м оп, 2∆м оп, 3∆м оп, 6∆м оп) від передавального лазера, після СП замість ЕЦОМ та БВІ введено електронну обчислювальну машину (ЕОМ). Побудова каналу вимірювання кутових швидкостей літальних апаратів для ЛВС полігонного випробувального комплексу пов'язана з використанням одномодового богаточастотного із синхронізацією подовжніх мод випромінювання єдиного лазера-передавача та ЧЧМ [3]. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у високоточному вимірюванні кутових швидкостей ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, та збереженні інформації, яка оброблена під час проведення випробувань ЛА. На Фіг. 1 наведена узагальнена структурна схема запропонованого каналу, де: ∆м oп, 2∆м oп, 3∆м oп, 6∆м oп - введення опорних сигналів з частотами міжмодових биттів від лазерапередавача. На Фіг. 2 наведено створення рівносигнального напрямку (РСН) та сканування 4-ма діаграмами спрямованості (ДС) лазерного випромінювання в ортогональних площинах. На Фіг. 3 наведені епюри напруг з виходів блоків запропонованого каналу вимірювання кутових швидкостей. Запропонований канал вимірювання кутових швидкостей літальних апаратів для ЛВС полігонного випробувального комплексу містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми І, резонансні лічильники, схеми порівняння, електронну обчислювальну машину та ∆м oп введення опорних сигналів з частотами міжмодових биттів (∆м oп, 2∆м oп, 3∆м oп, 6∆м oп) від передавального лазера. 1 UA 75281 U 5 10 15 20 25 30 35 40 45 50 55 Робота запропонованого каналу вимірювання кутових швидкостей літальних апаратів для ЛВС полігонного випробувального комплексу полягає у наступному. Із синхронізованого одномодового багаточастотного спектра випромінювання лазерапередавача (Лн) за допомогою СПМ виділяються необхідні пари частот для створення РСН на основі формування сумарної ДС лазерного випромінювання, завдяки 4-м парціальним ДС, що частково перетинаються, за умови використання різницевих частот міжмодових биттів ∆54=5-4=∆м, ∆97=9-7=2∆м, ∆63=6-3=3∆ь, ∆82=8-2=6∆м. Сигнал частот міжмодових биттів ∆м, 2∆м, 3∆м та 6∆м надходить на БД, що складається з 4-х п'єзоелектричних дефлекторів. Парціальні ДС лазерного випромінювання попарно зустрічно сканують БД у кожній із двох ортогональних площин (Фіг. 1, 2). Період сканування задається БКД, який разом з Лн живиться від керуючого елемента. Проходячи через ПРДО, груповий лазерний імпульсний сигнал пар частот: 5,4=∆м, 9,7=2∆м, 6,3=3∆м та 8,2=6∆м фокусується в скановані точки простору, оскільки здійснюється зустрічне сканування двома парами ДС лазерного випромінювання у кожній із двох ортогональних площин і або X і У (Фіг. 2). Прийняті ПРМО від ЛА, відбиті в процесі сканування чотирьох ДС, лазерні імпульсні сигнали і огинаючі сигнали ДС лазерного випромінювання, за допомогою ФТД перетворюються в електричні імпульсні сигнали на різницевих частотах міжмодових биттів. Підсилені ШП, вони розподіляються по РП, які настроєні на відповідні частоти міжмодових биттів ∆м від, 2∆м від, 3∆м від, 6∆м від. При цьому імпульсні сигнали радіочастоти, що надходять з РП 1 і РП 2 (РП ∆м від і РП 2∆м від) формують сигнал кутової швидкості ', а РП 3 і РП 4 (РП 3∆м від і РП 6∆м від) - по кутової швидкості ’. Формування сигналу прискорення ' полягає у наступному. Виділені імпульси ФІ 1 першої І лінії від опорної частоти ∆м оп надходять на реверсивний лічильник (РЛч 1) (Фіг. 3). У цей же час, відбитий від ЛА оптичний сигнал частоти міжмодових биттів, який перетворюється ФТД у радіочастоту міжмодових биттів ∆м від, змінюється по закону руху ДС лазерного випромінювання, перетворюється у другій лінії II ФІ 2 у точках переходів півперіодів сканування в імпульси (один імпульс за півперіод сканування), надходить на тригер "1" та запускає його першим імпульсом. Надходячи першим, імпульс від тригера відкриває РЛч для рахування імпульсів від ФІ 1 на схему І та для перезапису на схему порівняння. Другий імпульс від тригера надходить на реверсивний вхід того ж РЛч, який здійснює зворотний рахунок імпульсів, що надходять через нього. Надходячи на тригер, третій імпульс і т. д. здійснює дію таким же чином, як перший. Другий імпульс не надходить на схему І, а третій імпульс надходить, як і перший на ФІ 3, схему І, пропускає різницеве число на схему порівняння і т. д. Таким чином, в РЛч записується число імпульсів, що дорівнює різниці подовженого та скороченого півперіоду сканування (руху ДС). Півперіод сканування подовжується тоді, коли швидкість руху ЛА співпадає з швидкістю руху ДС лазерного випромінювання, а коли не співпадає - скорочується (Фіг. 3). Формування сигналу кутової швидкості (3' відбувається таким же чином, як і для кутової швидкості ' (Фіг. 1). Отримання та відображення інформації про кутові швидкості ' і ' відбувається у ЕОМ. Для збереження інформації, яка оброблена під час проведення випробувань ЛА, в пам'яті ЕОМ використовується база даних - сукупність взаємопов'язаних даних, організованих у відповідності до схеми даних таким чином, щоб з ними міг працювати користувач. Формування сумарної ДС лазерного випромінювання, створення РСН та каналу, що пропонується, пов'язано із задоволенням жорстких вимог, що пред'являються до спектра випромінювання одномодового багаточастотного лазера-передавача, тобто високоточної синхронізації подовжніх мод і стабілізації частот міжмодових биттів. Джерела інформації: 1. Рондин Ю.П., Коломийцев А.В. Система автоматического сопровождения объекта по направлению на многомодовых лазерах.// Информационные системы. Вып. - 1(5). - X.: НАНУ, ПАНИ, ХВУ. - 1997. - С. 35-39. 2. Деклараційний патент на винахід 63285 А, Україна, МПК G01S 11/04, G01S 17/42. Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотночасового методу вимірювання. / Альошин Г.В., Коломійцев О.В., Пашков Д.П. - № 2003032666; заяв. 27.03.2003; опубл. 15.01.2004; Бюл. № 1. - 8 с. 2 UA 75281 U 3. Патент на корисну модель № 55645, Україна, MПK G01S 17/42, G01 S 17/66. Частотночасовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарата. / Коломійцев О.В. - № u201005225; заяв. 29.04.2010; опубл. 27.12.2010; Бюл. № 24. - 14 с. 5 10 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Канал вимірювання кутових швидкостей літальних апаратів для ЛВС полігонного випробувального комплексу, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми I, резонансні лічильники, схеми порівняння (СП) та ∆м оп - введення опорних сигналів з частотами міжмодових биттів (∆м оп, 2∆м оп, 3∆м оп, 6∆м оп) від передавального лазера, який відрізняється тим, що після СП замість електронно-цифрових обчислювальних машин та блоків відображення інформації введено електронну обчислювальну машину. 3 UA 75281 U Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюChannel for measurement of angular velocities of aircrafts for laser measuring system of a range test complex
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Alioshyn Hennadii Vasyliovych, Koval Volodymyr Valeriiovych, Lukovskyi Oleg Yaroslavovych, Orlov Sergii Volodymyrovych, Ochkurenko Oleksandr Viktorovych, Rondin Yurii Petrovych, Sachuk Ihor Ivanovych, Khrapchynskyi Vasyl Olehovych, Chumak Borys Oleksandrovych
Назва патенту російськоюКанал измерения угловых скоростей летательных аппаратов для лис полигонного испытательного комплекса
Автори російськоюКоломийцев Алексей Владимирович, Алешин Геннадий Васильевич, Коваль Владимир Валериевич, Луковский Олег Ярославович, Орлов Сергей Владимирович, Очкуренко Александр Викторович, Рондин Юрий Петрович, Сачук Игорь Иванович, Храпчинский Василий Олегович, Чумак Борис Александрович
МПК / Мітки
МПК: G01S 17/42, G01S 11/00
Мітки: лвс, випробувального, комплексу, полігонного, апаратів, літальних, канал, кутових, швидкостей, вимірювання
Код посилання
<a href="https://ua.patents.su/6-75281-kanal-vimiryuvannya-kutovikh-shvidkostejj-litalnikh-aparativ-dlya-lvs-poligonnogo-viprobuvalnogo-kompleksu.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання кутових швидкостей літальних апаратів для лвс полігонного випробувального комплексу</a>
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ла для лвс полігонного випробувального комплексу
Номер патенту: 75245
Опубліковано: 26.11.2012
Автори: Сачук Ігор Іванович, Храпчинський Василь Олегович, Воронов Дмитро Миколайович, Толстолузька Олена Геннадіївна, Жилін Євген Ігорович, Альошин Геннадій Васильович, Орлов Сергій Володимирович, Квіткін Костянтин Петрович, Коломійцев Олексій Володимирович, Васильєв Дмитро Геннадійович
МПК: G01S 17/42
Мітки: літальних, канал, розпізнавання, вимірювання, комплексу, випробувального, лвс, апаратів, кутових, можливістю, швидкостей, полігонного
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА для ЛВС полігонного випробувального комплексу, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, блок розпізнавання, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі...
Канал вимірювання кутових швидкостей літальних апаратів з додатковим скануванням для лвс полігонного випробувального комплексу
Номер патенту: 71844
Опубліковано: 25.07.2012
Автори: Альошин Геннадій Васильович, Васильєв Дмитро Геннадійович, Храпчинський Василь Олегович, Висоцький Олег Володимирович, Воробйов Руслан Володимирович, Орлов Сергій Володимирович, Коломійцев Олексій Володимирович, Сачук Ігор Іванович, Третяк В'ячеслав Федорович, Бугаєв Сергій Вікторовіч
МПК: G01S 11/00, G01S 17/42
Мітки: комплексу, вимірювання, додатковим, скануванням, полігонного, випробувального, канал, літальних, лвс, кутових, апаратів, швидкостей
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з додатковим скануванням для ЛВС полігонного випробувального комплексу, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів,...
Канал вимірювання кутових швидкостей літальних апаратів для лівс полігонного випробувального комплексу
Номер патенту: 71841
Опубліковано: 25.07.2012
Автори: Альошин Геннадій Васильович, Ставицький Олег Миколайович, Сачук Ігор Іванович, Опенько Павло Вікторович, Болюбаш Олексій Олексійович, Коломійцев Олексій Володимирович, Клівець Сергій Іванович, Воробйов Руслан Володимирович, Полішко Сергій Володимирович, Храпчинський Василь Олегович
МПК: G01S 17/42, G01S 17/66
Мітки: комплексу, випробувального, лівс, кутових, апаратів, канал, швидкостей, вимірювання, літальних, полігонного
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів для ЛІВС полігонного випробувального комплексу, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, інформаційний блок для інформаційного взаємозв'язку з літальним апаратом, резонансні підсилювачі, настроєні на відповідні частоти міжмодових...
Канал вимірювання кутових швидкостей літальних апаратів з бспм для лівс полігонного випробувального комплексу
Номер патенту: 71893
Опубліковано: 25.07.2012
Автори: Кужель Ігор Євгенійович, Сідченко Сергій Олександрович, Храпчинський Василь Олегович, Долина Михайло Петрович, Бугаєв Сергій Вікторовіч, Котов Олексій Борисович, Кремешний Олександр Іванович, Орлов Сергій Володимирович, Сачук Ігор Іванович, Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: випробувального, літальних, вимірювання, кутових, бспм, швидкостей, полігонного, апаратів, канал, комплексу, лівс
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з БСПМ для ЛІВС полігонного випробувального комплексу, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, багатоканальний селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, інформаційний блок, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів,...
Канал вимірювання кутових швидкостей літальних апаратів з бспм та можливістю розпізнавання ла для лівс полігонного випробувального комплексу
Номер патенту: 72299
Опубліковано: 10.08.2012
Автори: Коломійцев Олексій Володимирович, Опенько Павло Вікторович, Храпчинський Василь Олегович, Балабуха Олексій Сергійович, Сачук Ігор Іванович, Альошин Геннадій Васильович, Жилін Євген Ігорович, Пєвцов Геннадій Володимирович, Васильєв Дмитро Геннадійович, Толстолузька Олена Геннадіївна
МПК: G01S 17/66, G01S 17/42
Мітки: кутових, випробувального, комплексу, розпізнавання, полігонного, канал, вимірювання, швидкостей, лівс, можливістю, бспм, апаратів, літальних
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з БСПМ та можливістю розпізнавання ЛА для ЛІВС полігонного випробувального комплексу, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, багатофункціональний селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, багатофункціональний інформаційний блок із б-введенням сигналу тангенціальної...