Спосіб тривісної орієнтації космічного апарата
Номер патенту: 82937
Опубліковано: 26.05.2008
Автори: Кузнєцов Юрій Олексійович, Ковальов Сергій Онисимович, Лабазов Олег Олександрович
Формула / Реферат
Спосіб тривісної орієнтації космічного апарата, який полягає в тому, що за вимірами двох нерухомо зв'язаних з двома осями зв'язаної з космічним апаратом системи координат астродатчиків визначають напрямні косинуси двох зірок у зв'язаній системі координат, а потім, обчисливши за даними зоряного каталогу напрямні косинуси зірок в опорній системі координат, визначають тривісну орієнтацію космічного апарата відносно опорної системи координат, який відрізняється тим, що вимірюють одним астродатчиком кутове положення першої зірки, обчислюють і запам'ятовують її напрямні косинуси у зв'язаній з космічним апаратом системі координат, визначають напрямок, що забезпечує відсутність засвічення астродатчика Сонцем, Землею і Місяцем, а також визначають близьку до 90 град. величину кута програмного розвороту космічного апарата для виміру цим же астродатчиком другої зірки, виконують програмний розворот космічного апарата навколо осі апарата, відносно якої виконавчі органи системи керування мають максимальну ефективність, потім вимірюють астродатчиком кутове положення другої зірки й обчислюють її напрямні косинуси в зв'язаній з космічним апаратом системі координат, за запам'ятованими напрямними косинусами першої зірки й за інформацією про напрямок і величину програмного розвороту обчислюють напрямні косинуси першої зірки в зв'язаній з космічним апаратом системі координат після виконання програмного розвороту і за напрямними косинусами першої і другої зірок у зв'язаній з космічним апаратом системі координат і даними зоряного каталогу про положення цих зірок в опорній системі координат визначають тривісну орієнтацію космічного апарата.
Текст
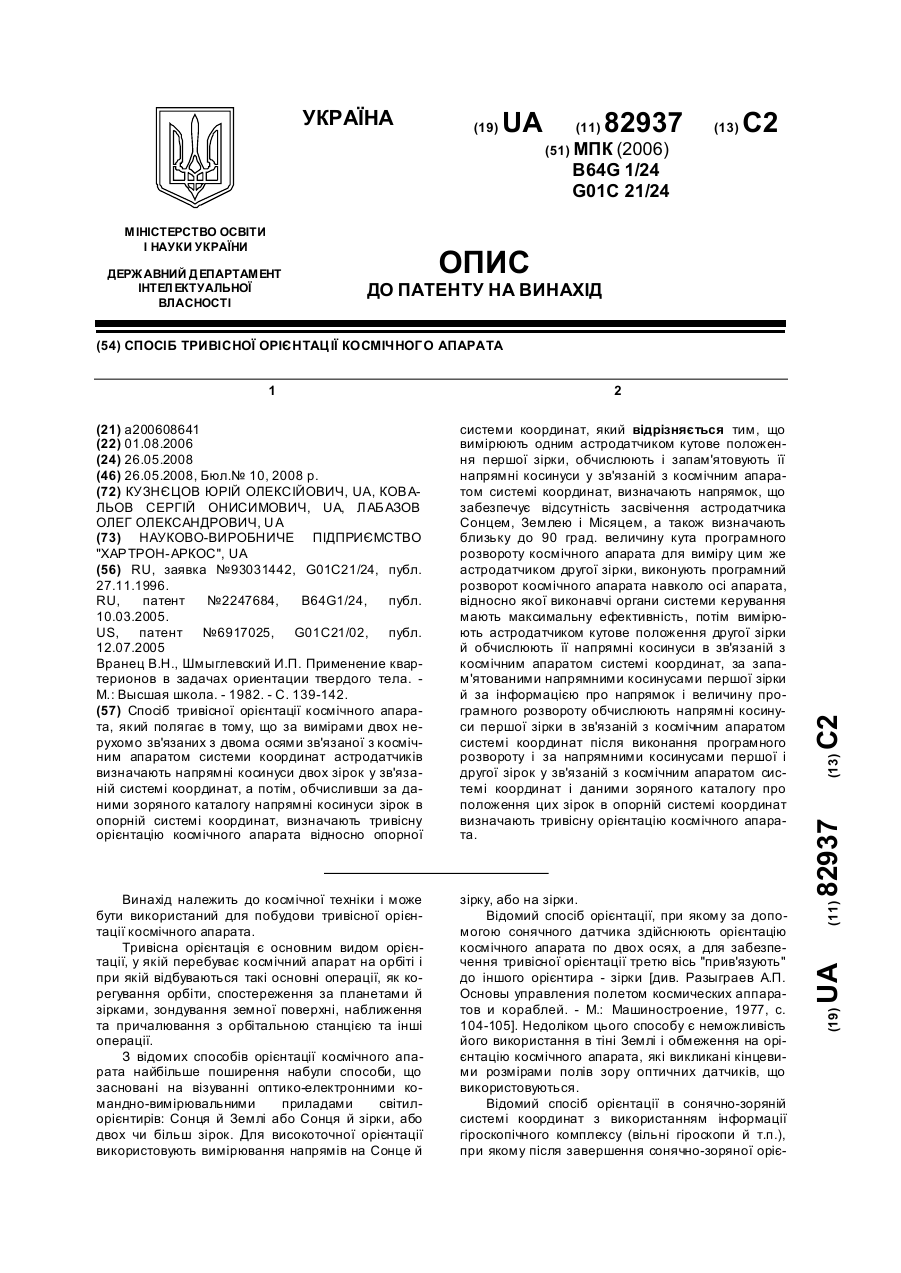
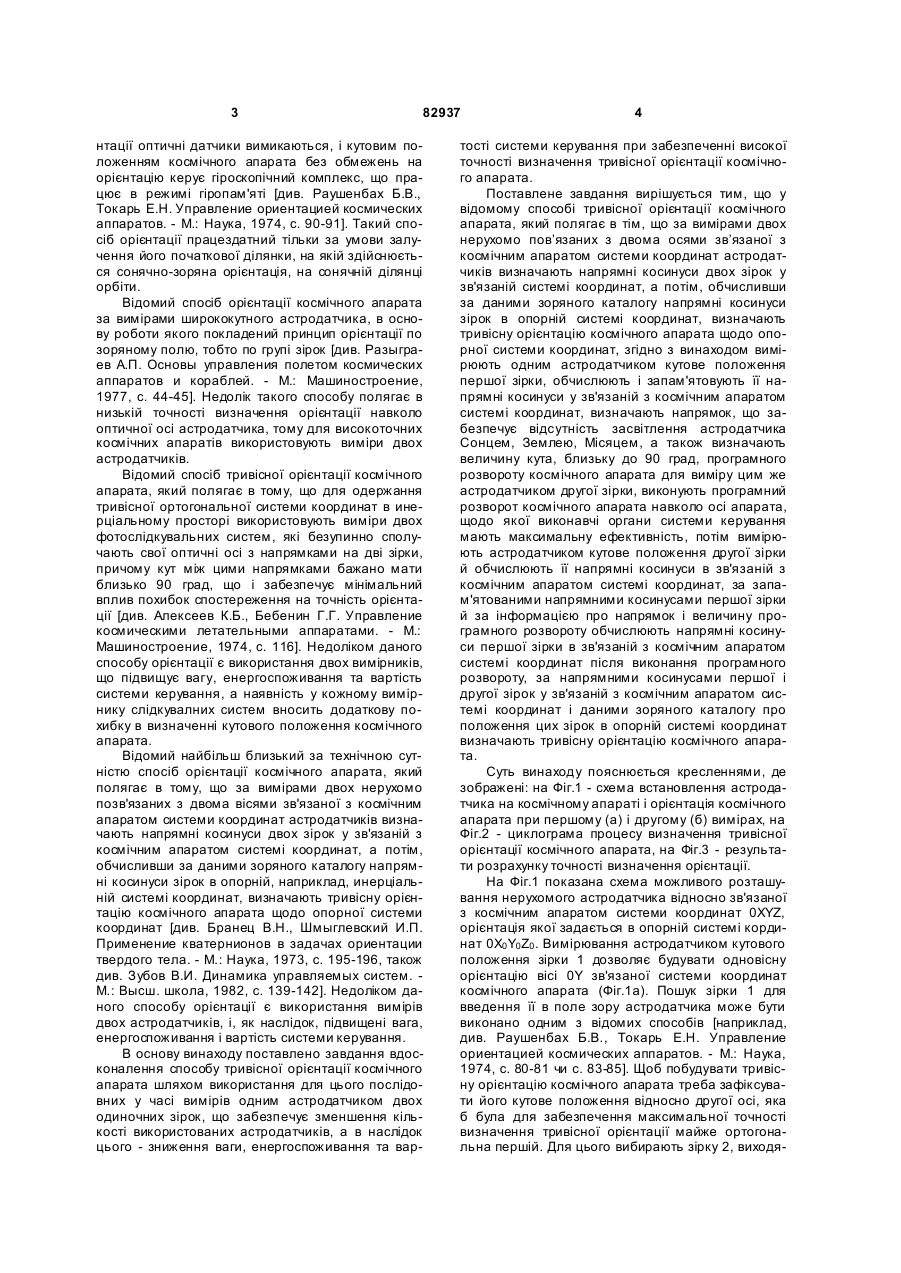
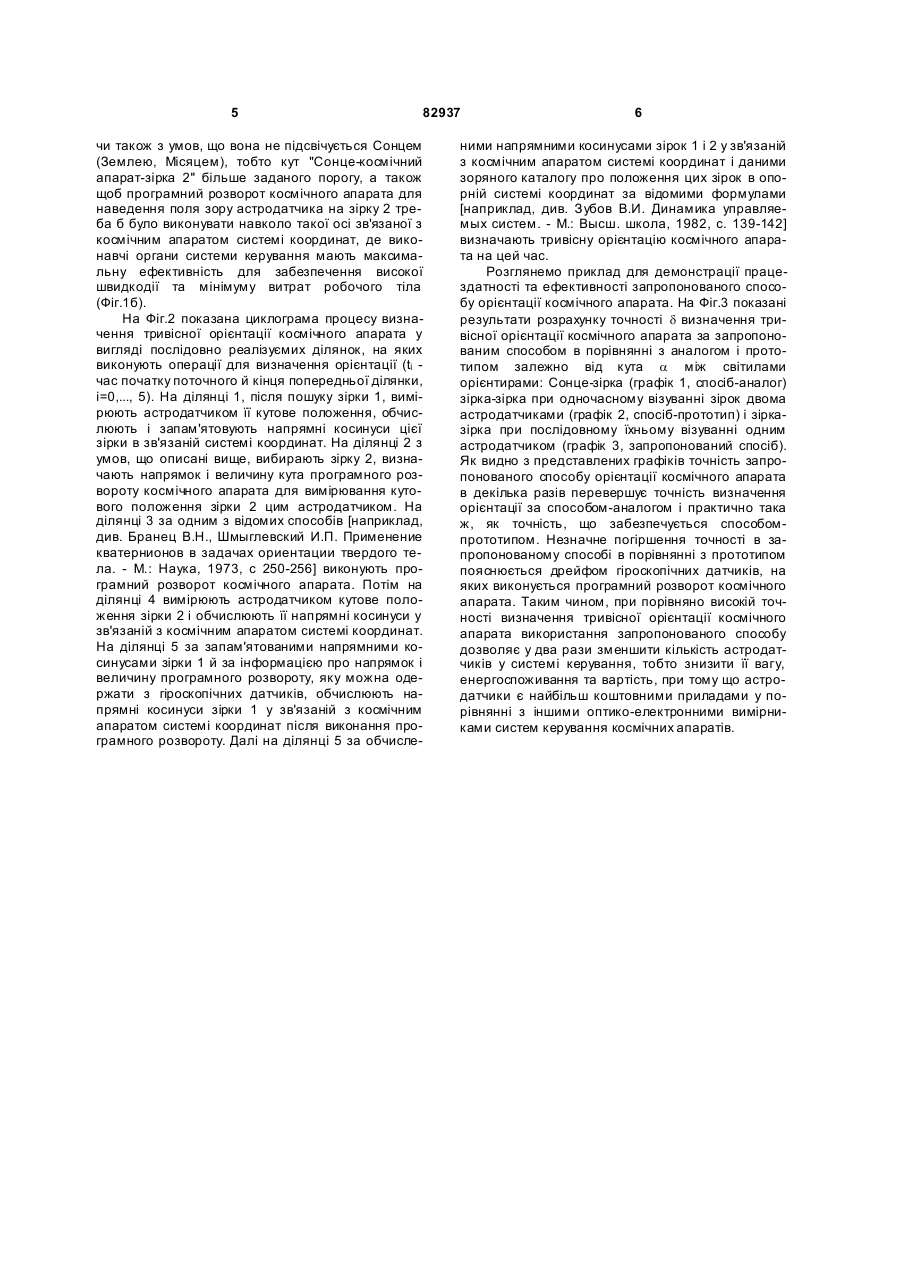
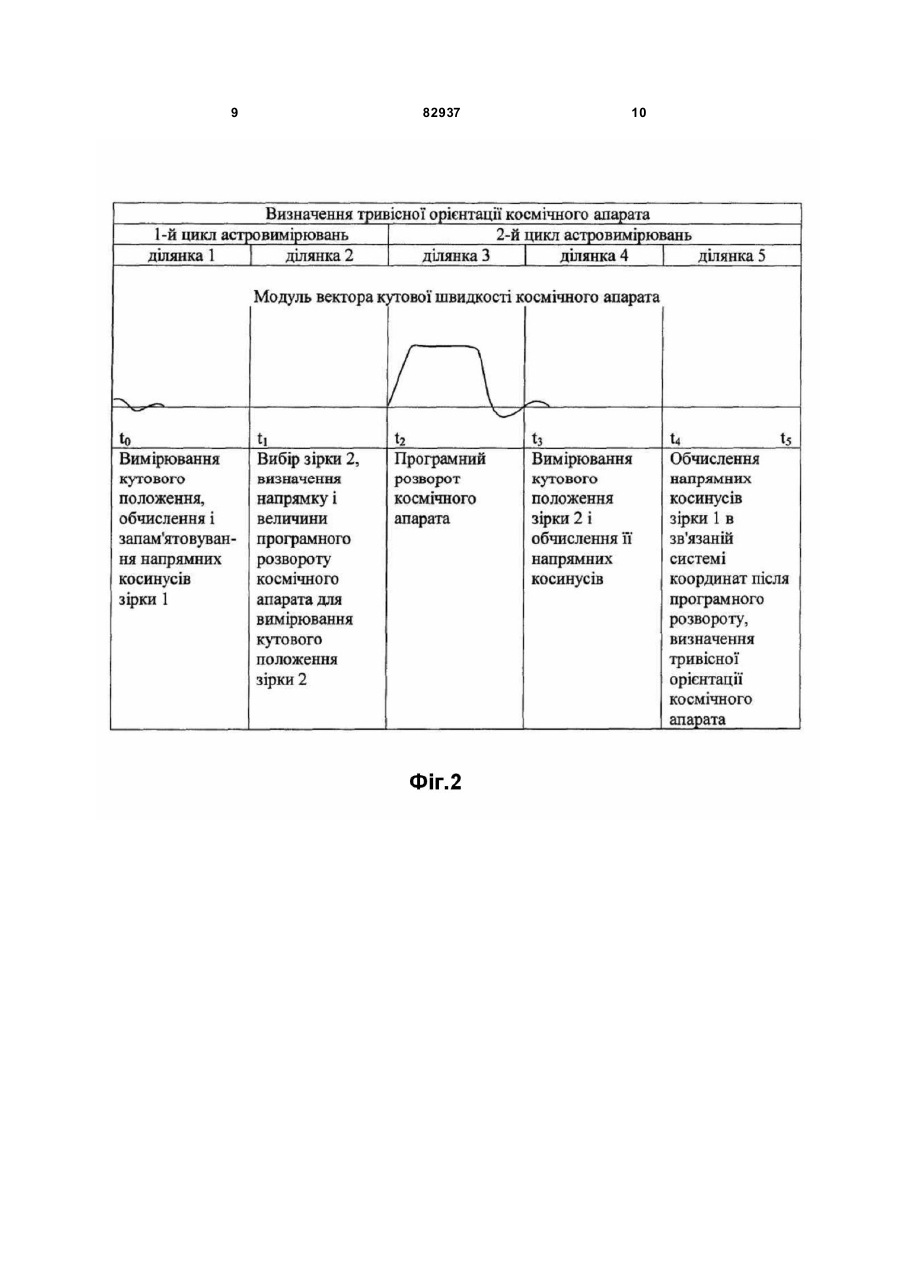
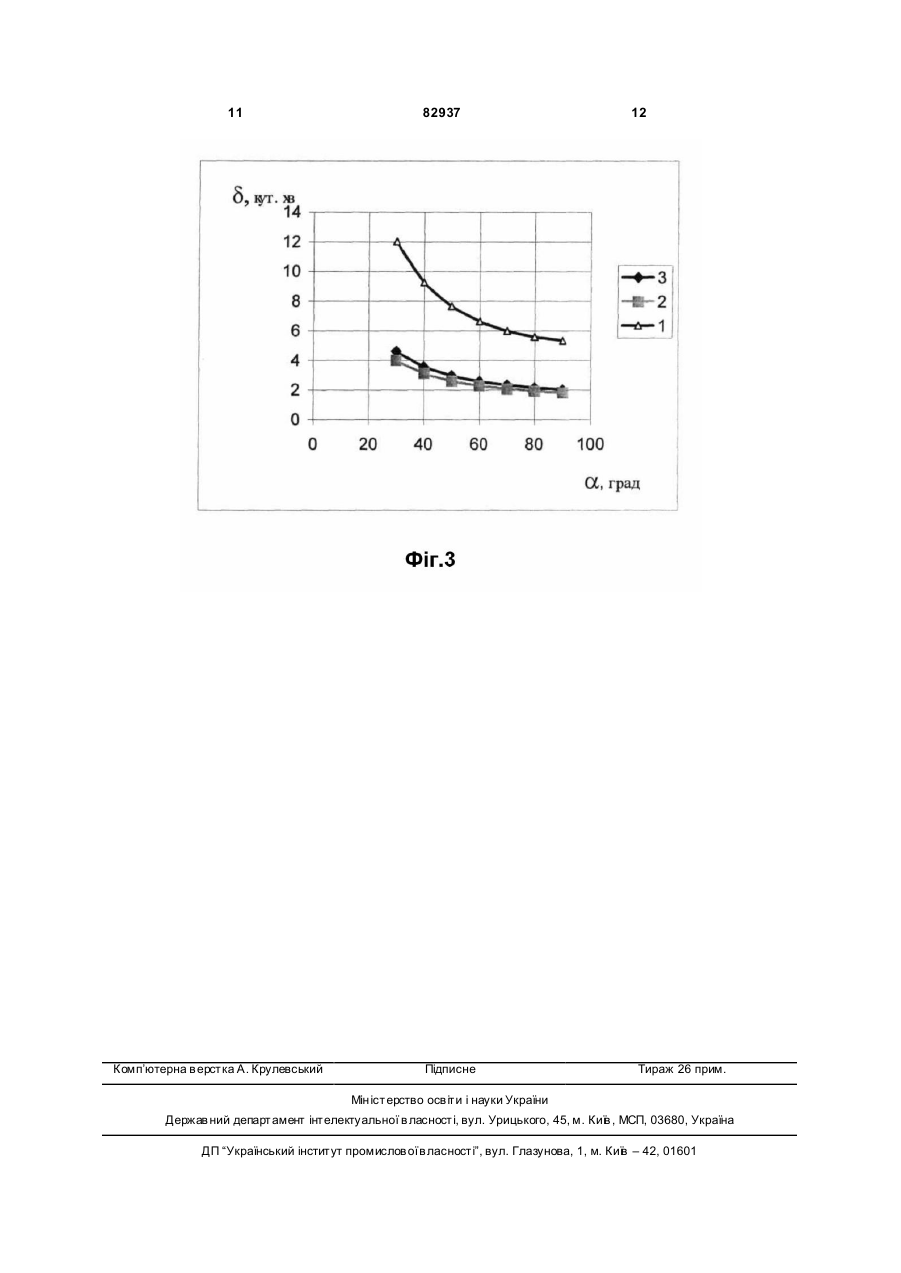
Спосіб тривісної орієнтації космічного апарата, який полягає в тому, що за вимірами двох нерухомо зв'язаних з двома осями зв'язаної з космічним апаратом системи координат астродатчиків визначають напрямні косинуси двох зірок у зв'язаній системі координат, а потім, обчисливши за даними зоряного каталогу напрямні косинуси зірок в опорній системі координат, визначають тривісну орієнтацію космічного апарата відносно опорної C2 2 (19) 1 3 82937 нтації оптичні датчики вимикаються, і кутовим положенням космічного апарата без обмежень на орієнтацію керує гіроскопічний комплекс, що працює в режимі гіропам'яті [див. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - M.: Наука, 1974, с. 90-91]. Такий спосіб орієнтації працездатний тільки за умови залучення його початкової ділянки, на якій здійснюється сонячно-зоряна орієнтація, на сонячній ділянці орбіти. Відомий спосіб орієнтації космічного апарата за вимірами ширококутного астродатчика, в основу роботи якого покладений принцип орієнтації по зоряному полю, тобто по групі зірок [див. Разыграев А.П. Основы управления полетом космических аппаратов и кораблей. - M.: Машиностроение, 1977, с. 44-45]. Недолік такого способу полягає в низькій точності визначення орієнтації навколо оптичної осі астродатчика, тому для високоточних космічних апаратів використовують виміри двох астродатчиків. Відомий спосіб тривісної орієнтації космічного апарата, який полягає в тому, що для одержання тривісної ортогональної системи координат в инерціальному просторі використовують виміри двох фотослідкувальних систем, які безупинно сполучають свої оптичні осі з напрямками на дві зірки, причому кут між цими напрямками бажано мати близько 90 град, що і забезпечує мінімальний вплив похибок спостереження на точність орієнтації [див. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. - M.: Машиностроение, 1974, с. 116]. Недоліком даного способу орієнтації є використання двох вимірників, що підвищує вагу, енергоспоживання та вартість системи керування, а наявність у кожному вимірнику слідкувалних систем вносить додаткову похибку в визначенні кутового положення космічного апарата. Відомий найбільш близький за технічною сутністю спосіб орієнтації космічного апарата, який полягає в тому, що за вимірами двох нерухомо позв'язаних з двома вісями зв'язаної з космічним апаратом системи координат астродатчиків визначають напрямні косинуси двох зірок у зв'язаній з космічним апаратом системі координат, а потім, обчисливши за даними зоряного каталогу напрямні косинуси зірок в опорній, наприклад, инерціальній системі координат, визначають тривісну орієнтацію космічного апарата щодо опорної системи координат [див. Бранец В.H., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - M.: Наука, 1973, с. 195-196, також див. Зубов В.И. Динамика управляемых систем. M.: Высш. школа, 1982, с. 139-142]. Недоліком даного способу орієнтації є використання вимірів двох астродатчиків, і, як наслідок, підвищені вага, енергоспоживання і вартість системи керування. В основу винаходу поставлено завдання вдосконалення способу тривісної орієнтації космічного апарата шляхом використання для цього послідовних у часі вимірів одним астродатчиком двох одиночних зірок, що забезпечує зменшення кількості використованих астродатчиків, а в наслідок цього - зниження ваги, енергоспоживання та вар 4 тості системи керування при забезпеченні високої точності визначення тривісної орієнтації космічного апарата. Поставлене завдання вирішується тим, що у відомому способі тривісної орієнтації космічного апарата, який полягає в тім, що за вимірами двох нерухомо пов’язаних з двома осями зв’язаної з космічним апаратом системи координат астродатчиків визначають напрямні косинуси двох зірок у зв'язаній системі координат, а потім, обчисливши за даними зоряного каталогу напрямні косинуси зірок в опорній системі координат, визначають тривісну орієнтацію космічного апарата щодо опорної системи координат, згідно з винаходом вимірюють одним астродатчиком кутове положення першої зірки, обчислюють і запам'ятовують її напрямні косинуси у зв'язаній з космічним апаратом системі координат, визначають напрямок, що забезпечує відсутність засвітлення астродатчика Сонцем, Землею, Місяцем, а також визначають величину кута, близьку до 90 град, програмного розвороту космічного апарата для виміру цим же астродатчиком другої зірки, виконують програмний розворот космічного апарата навколо осі апарата, щодо якої виконавчі органи системи керування мають максимальну ефективність, потім вимірюють астродатчиком кутове положення другої зірки й обчислюють її напрямні косинуси в зв'язаній з космічним апаратом системі координат, за запам'ятованими напрямними косинусами першої зірки й за інформацією про напрямок і величину програмного розвороту обчислюють напрямні косинуси першої зірки в зв'язаній з космічним апаратом системі координат після виконання програмного розвороту, за напрямними косинусами першої і другої зірок у зв'язаній з космічним апаратом системі координат і даними зоряного каталогу про положення цих зірок в опорній системі координат визначають тривісну орієнтацію космічного апарата. Суть винаходу пояснюється кресленнями, де зображені: на Фіг.1 - схема встановлення астродатчика на космічному апараті і орієнтація космічного апарата при першому (а) і другому (б) вимірах, на Фіг.2 - циклограма процесу визначення тривісної орієнтації космічного апарата, на Фіг.3 - результати розрахунку точності визначення орієнтації. На Фіг.1 показана схема можливого розташування нерухомого астродатчика відносно зв'язаної з космічним апаратом системи координат 0XYZ, орієнтація якої задається в опорній системі кординат 0X0 Y0 Z0 . Вимірювання астродатчиком кутового положення зірки 1 дозволяє будувати одновісну орієнтацію вісі 0Y зв'язаної системи координат космічного апарата (Фіг.1a). Пошук зірки 1 для введення її в поле зору астродатчика може бути виконано одним з відомих способів [наприклад, див. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - M.: Наука, 1974, с. 80-81 чи с. 83-85]. Щоб побудувати тривісну орієнтацію космічного апарата треба зафіксувати його кутове положення відносно другої осі, яка б була для забезпечення максимальної точності визначення тривісної орієнтації майже ортогональна першій. Для цього вибирають зірку 2, виходя 5 82937 чи також з умов, що вона не підсвічується Сонцем (Землею, Місяцем), тобто кут "Сонце-космічний апарат-зірка 2" більше заданого порогу, а також щоб програмний розворот космічного апарата для наведення поля зору астродатчика на зірку 2 треба б було виконувати навколо такої осі зв'язаної з космічним апаратом системі координат, де виконавчі органи системи керування мають максимальну ефективність для забезпечення високої швидкодії та мінімуму витрат робочого тіла (Фіг.1б). На Фіг.2 показана циклограма процесу визначення тривісної орієнтації космічного апарата у вигляді послідовно реалізуємих ділянок, на яких виконують операції для визначення орієнтації (tі час початку поточного й кінця попередньої ділянки, і=0,..., 5). На ділянці 1, після пошуку зірки 1, вимірюють астродатчиком її кутове положення, обчислюють і запам'ятовують напрямні косинуси цієї зірки в зв'язаній системі координат. На ділянці 2 з умов, що описані вище, вибирають зірку 2, визначають напрямок і величину кута програмного розвороту космічного апарата для вимірювання кутового положення зірки 2 цим астродатчиком. На ділянці 3 за одним з відомих способів [наприклад, див. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - M.: Наука, 1973, с 250-256] виконують програмний розворот космічного апарата. Потім на ділянці 4 вимірюють астродатчиком кутове положення зірки 2 і обчислюють її напрямні косинуси у зв'язаній з космічним апаратом системі координат. На ділянці 5 за запам'ятованими напрямними косинусами зірки 1 й за інформацією про напрямок і величину програмного розвороту, яку можна одержати з гіроскопічних датчиків, обчислюють напрямні косинуси зірки 1 у зв'язаній з космічним апаратом системі координат після виконання програмного розвороту. Далі на ділянці 5 за обчисле 6 ними напрямними косинусами зірок 1 і 2 у зв'язаній з космічним апаратом системі координат і даними зоряного каталогу про положення цих зірок в опорній системі координат за відомими формулами [наприклад, див. Зубов В.И. Динамика управляемых систем. - M.: Высш. школа, 1982, с. 139-142] визначають тривісну орієнтацію космічного апарата на цей час. Розглянемо приклад для демонстрації працездатності та ефективності запропонованого способу орієнтації космічного апарата. На Фіг.3 показані результати розрахунку точності d визначення тривісної орієнтації космічного апарата за запропонованим способом в порівнянні з аналогом і прототипом залежно від кута a між світилами орієнтирами: Сонце-зірка (графік 1, спосіб-аналог) зірка-зірка при одночасному візуванні зірок двома астродатчиками (графік 2, спосіб-прототип) і зірказірка при послідовному їхньому візуванні одним астродатчиком (графік 3, запропонований спосіб). Як видно з представлених графіків точність запропонованого способу орієнтації космічного апарата в декілька разів перевершує точність визначення орієнтації за способом-аналогом і практично така ж, як точність, що забезпечується способомпрототипом. Незначне погіршення точності в запропонованому способі в порівнянні з прототипом пояснюється дрейфом гіроскопічних датчиків, на яких виконується програмний розворот космічного апарата. Таким чином, при порівняно високій точності визначення тривісної орієнтації космічного апарата використання запропонованого способу дозволяє у два рази зменшити кількість астродатчиків у системі керування, тобто знизити її вагу, енергоспоживання та вартість, при тому що астродатчики є найбільш коштовними приладами у порівнянні з іншими оптико-електронними вимірниками систем керування космічних апаратів. 7 82937 8 9 82937 10 11 Комп’ютерна в ерстка А. Крулевський 82937 Підписне 12 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of triaxial orientation of spacecraft
Автори англійськоюKuznietsov Yurii Oleksiiovych, Kovaliov Serhii Onysymovych, Labazov Oleh Oleksandrovych
Назва патенту російськоюСпособ трехосной ориентации космического аппарата
Автори російськоюКузнецов Юрий Алексеевич, Ковалев Сергей Анисимович, Лабазов Олег Александрович
МПК / Мітки
МПК: B64G 1/24, G01C 21/24
Мітки: апарата, орієнтації, спосіб, космічного, тривісної
Код посилання
<a href="https://ua.patents.su/6-82937-sposib-trivisno-oriehntaci-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб тривісної орієнтації космічного апарата</a>
Спосіб розвантаження системи силових гіроскопів космічного апарата
Номер патенту: 62147
Опубліковано: 15.12.2003
Автори: Голоскоков Євген Григорович, Кузнєцов Юрій Олексійович, Успенський Валерій Борисович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: апарата, силових, спосіб, системі, гіроскопів, космічного, розвантаження
Формула / Реферат:
Спосіб розвантаження системи силових гіроскопів космічного апарата, який полягає в тому, що вимірюють вектор нагромадженого кінетичного моменту системи силових гіроскопів, вимірюють вектор абсолютної кутової швидкості космічного апарата, визначають сумарний вектор кінетичного моменту космічного апарата, виконують розвантаження за допомогою реактивних двигунів орієнтації, який відрізняється тим, що фіксують момент досягнення допустимого...
Спосіб нейтралізації електростатичного заряду поверхні космічного апарата та його частин
Номер патенту: 73462
Опубліковано: 15.07.2005
Автор: Хитько Андрій Володимирович
МПК: F03H 1/00
Мітки: апарата, частин, заряду, електростатичного, поверхні, спосіб, космічного, нейтралізації
Формула / Реферат:
Спосіб нейтралізації електростатичного заряду поверхні космічного апарата та його часток, що включає перенесення електростатичного заряду у кулонах, який відрізняється тим, що перенесення електростатичного заряду здійснюють по стаціонарному мосту квазінейтральної плазми, який утворюють між космічним апаратом і плазмою космічного простору або між окремими електрично ізольованими одна від одної частками космічного апарата.
Спосіб активного відмовостійкого управління орієнтацією космічного апарата
Номер патенту: 11671
Опубліковано: 16.01.2006
Автори: Лученко Олег Олексійович, Пархоменко Юлія Анатоліївна, Гавриленко Олег Іванович, Мирна Олена Володимирівна
МПК: B64G 1/28
Мітки: управління, орієнтацією, космічного, апарата, активного, спосіб, відмовостійкого
Формула / Реферат:
Спосіб активного відмовостійкого управління орієнтацією космічного апарата, що включає вимірювання кутового відхилення орієнтованої осі космічного апарата від потрібного напряму, визначення моментів часу, у які вимірюване кутове відхилення приймає екстремальні значення, змінювання моменту інерції космічного апарата в моменти часу, що відповідають відповідним екстремальним значенням кутового відхилення та значенням кутового відхилення, що...
Спосіб гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 80583
Опубліковано: 10.10.2007
Автори: Бандура Іван Миколайович, Кулік Анатолій Степанович, Чебераха Ольга Анатоліївна
МПК: B64G 1/24
Мітки: кутових, апарата, космічного, початкових, гасіння, спосіб, літального, вісесиметричного, швидкостей
Формула / Реферат:
Спосіб гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для гасіння складових кутової швидкості обертання навколо двох осей забезпечують паузу без керування, для гасіння подовжньої кутової швидкості й однієї з поперечних кутових...
Спосіб визначення поточних навігаційних параметрів космічного апарата
Номер патенту: 32157
Опубліковано: 12.05.2008
Автори: Богом'я Володимир Іванович, Загорулько Олександр Миколайович
МПК: B64G 1/24
Мітки: космічного, поточних, спосіб, апарата, параметрів, визначення, навігаційних
Формула / Реферат:
Спосіб визначення поточних навігаційних параметрів космічного апарата, який полягає в тому, що за допомогою наземних оптичних вимірювальних систем проводять спостереження та визначення поточних навігаційних параметрів космічного апарата (КА) на тіньовій (неосвітленій) ділянці орбіти за відсутності відображеного від конструкції КА сонячного світла, який відрізняється тим, що для освітлювання використовують штучне джерело випромінювання, яке...
Попередній патент: Свердловинний електропривідний насосний агрегат
Наступний патент: Переривчасті передача та прийом даних послуги мультимедійної циркулярної/багатоадресної передачі у системі мобільного зв’язку
Випадковий патент: Антидіабетичний засіб