Спосіб активного відмовостійкого управління орієнтацією космічного апарата
Номер патенту: 11671
Опубліковано: 16.01.2006
Автори: Лученко Олег Олексійович, Гавриленко Олег Іванович, Мирна Олена Володимирівна, Пархоменко Юлія Анатоліївна


Формула / Реферат
Спосіб активного відмовостійкого управління орієнтацією космічного апарата, що включає вимірювання кутового відхилення орієнтованої осі космічного апарата від потрібного напряму, визначення моментів часу, у які вимірюване кутове відхилення приймає екстремальні значення, змінювання моменту інерції космічного апарата в моменти часу, що відповідають відповідним екстремальним значенням кутового відхилення та значенням кутового відхилення, що знаходяться в зоні допустимих значень відхилень від потрібного напряму, який відрізняється тим, що, при наявності елементів системи орієнтації в стані відмови за даними вимірювання кутового відхилення орієнтованої осі космічного апарата від потрібного напряму, визначають характеристики відмови та формують додатковий момент інерції космічного апарата для парування наслідків дії відмови.
Текст
Спосіб активного відмовостійкого управління орієнтацією космічного апарата, що включає вимірювання кутового відхилення орієнтованої осі космічного апарата від потрібного напряму, визна 3 11671 екстремальні значення; змінювання моменту інерції космічного апарату в моменти часу, що відповідають відповідним екстремальним значенням кутового відхилення та значенням кутового відхилення, що знаходяться в зоні допустимих значень відхилень від потрібного напряму, згідно з корисною моделлю при наявності елементів системи орієнтації в стані відмови по даним вимірювання кутового відхилення осі, що орієнтується, космічного апарату від потрібного направлення визначають характеристики відмови та формують додатковий момент інерції космічного апарату для парування наслідків дії відмови. Сутність корисної моделі пояснюється наступним. Рівняння руху об'єкту, що орієнтується відносно однієї осі, має вигляд: Ap Ap M (1) де A - момент інерції, p - кутова швидкість обертання навколо осі управління, M - управляючий момент. З (1) видно, що демпфування, що створюється членом Ap , буде ефективним при великих швидкостях p, а при p=0 весь член обертається в нуль і в цей момент направлення зміни А не грає суттєвої ролі, його можна зменшити до мінімального значення, а у подальшому знову збільшити для введення додатного демпфування. Момент часу р=0 без прямого вимірювання кутової швидкості р датчиком кутової швидкості, наприклад, гіроскопічного типу, визначається по досягненню кутової координати (р, що вимірюється, екстремуму (максимуму або мінімуму). Нехай в момент часу, коли становиться більше установленого значення y, кутова швид кість об'єкту становиться рівною р1. В цей момент збільшуємо момент інерції А на А. При цьому по закону збереження кінетичного моменту відбувається зменшення швидкості. Àp1 p2 (2) À À Під дією управляючого моменту М буде відбуватися гальмування об'єкту. В момент, коли вихідна координата 1 достигне екстремуму (максимуму), вертають момент інерції в початкове положення А. Подальший рух буде відбувається під дією управляючого моменту М в напрямку допустимого значення у при моменті інерції А, що відповідає прискоренню M (3 ) A Кут повороту 2 буде рівним куту 1, але протилежне за напрямком. Кутова швидкість р2 буде менше р1 p3 2 1a p1 A , ( 4) A A таким чином відбулося демпфування коливань. 4 При вході в зону нечутливості знову y можна збільшити момент інерції на величину А, а потім, при досягненні екстремуму, знову повернути його в початковий стан. При виникненні відмов в виконавчих елементах або вимірювальній системі для забезпечення найбільш оптимального демпфування коливань з урахуванням виникнення відмов в елементах системи орієнтації необхідно вирішити задачу діагностування. Для виявлення відмов треба застосовувати показники якості у формі наступних функціоналів: I0= ; I1= p (5) Класифікаційна обробка поточного значення Л(р та Лр має вигляд: 1, якщо 1 , 2 ; f 0 0, якщо 1 , 2 ; (6) 1, якщо 1p , 2p ; f p(k ) 0 0, якщо 1p , 2p ; Пошук місця відмови. Дійсні функції, що характеризують множину елементів структури діагностичних ознак у термінах булевої змінної, мають вигляд: 1, якщо C ; f 0 1 0, якщо C ; (7 ) 1, якщо Cp ; f pi 0 0, якщо Cp ; де С - множина функцій, що характеризують ознаку місця відмови. Визначення місця відмови можна здійснювати з використанням принципів рівнобіжного чи послідовного пошуку. Встановлення класу відмови. Основна задача встановлення класу відмови зводиться до одержання оцінних значень прямих ознак відмов i, на підставі доступних для виміру сигналів системи (кутової координати та кутової швидкості р). Зв'язок між ознаками, заданий за допомогою відповідних типів цілком діагностуємих ДМ, у загальному вигляді для основної задачі - встановлення класу - може бути представлений такими рівняннями: i i та p p i i, (8) де i(k) - векторна функція чутливості діагностичної моделі, що використовується для і-тої ознаки відмови. На підставі цього співвідношення за допомогою метода найменших квадратів можна обчислити величину ознаки класу i i та i pi i p i Встановивши характеристики відмови Да; формування додаткового моменту інерції космічного апарату для парування наслідків дії відмови слід (k ) 0 I виконувати таким чином, щоб Lim 0 та Lim 0 p(k ) 0. 5 11671 Множину можливих значень додаткового моменту інерції А визначають шляхом побудови областей стійкості в площині додаткового моменту і прямої ознаки відмови. При цьому розглядаємо лише ту частину кривих D-розбивки, що відповідає Комп’ютерна верстка А. Попік 6 межі стійкості. Таким чином, запропонований спосіб забезпечує найбільш оптимальне демпфування коливань з урахуванням виникнення відмов в елементах системи орієнтації. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of active failure-resistant control of spacecraft orientation
Автори англійськоюHavrylenko Oleh Ivanovych, Myrna Olena Volodymyrivna, Luchenko Oleh Oleksiiovych
Назва патенту російськоюСпособ активного отказоустойчивого управления ориентацией космического аппарата
Автори російськоюГавриленко Олег Иванович, Мирная Елена Владимировна, Лученко Олег Алексеевич
МПК / Мітки
МПК: B64G 1/28
Мітки: активного, відмовостійкого, управління, апарата, спосіб, орієнтацією, космічного
Код посилання
<a href="https://ua.patents.su/3-11671-sposib-aktivnogo-vidmovostijjkogo-upravlinnya-oriehntaciehyu-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб активного відмовостійкого управління орієнтацією космічного апарата</a>
Пристрій для визначення відносної кутової швидкості при коливальному процесі управління орієнтацією космічного апарата
Номер патенту: 10788
Опубліковано: 25.12.1996
Автори: Анупрієнко Генадій Єфремович, Карпачов Юрій Андрійович, Павловський Михайло Антонович
МПК: B64G 1/24
Мітки: відносної, процесі, космічного, коливальному, визначення, кутової, пристрій, управління, орієнтацією, швидкості, апарата
Формула / Реферат:
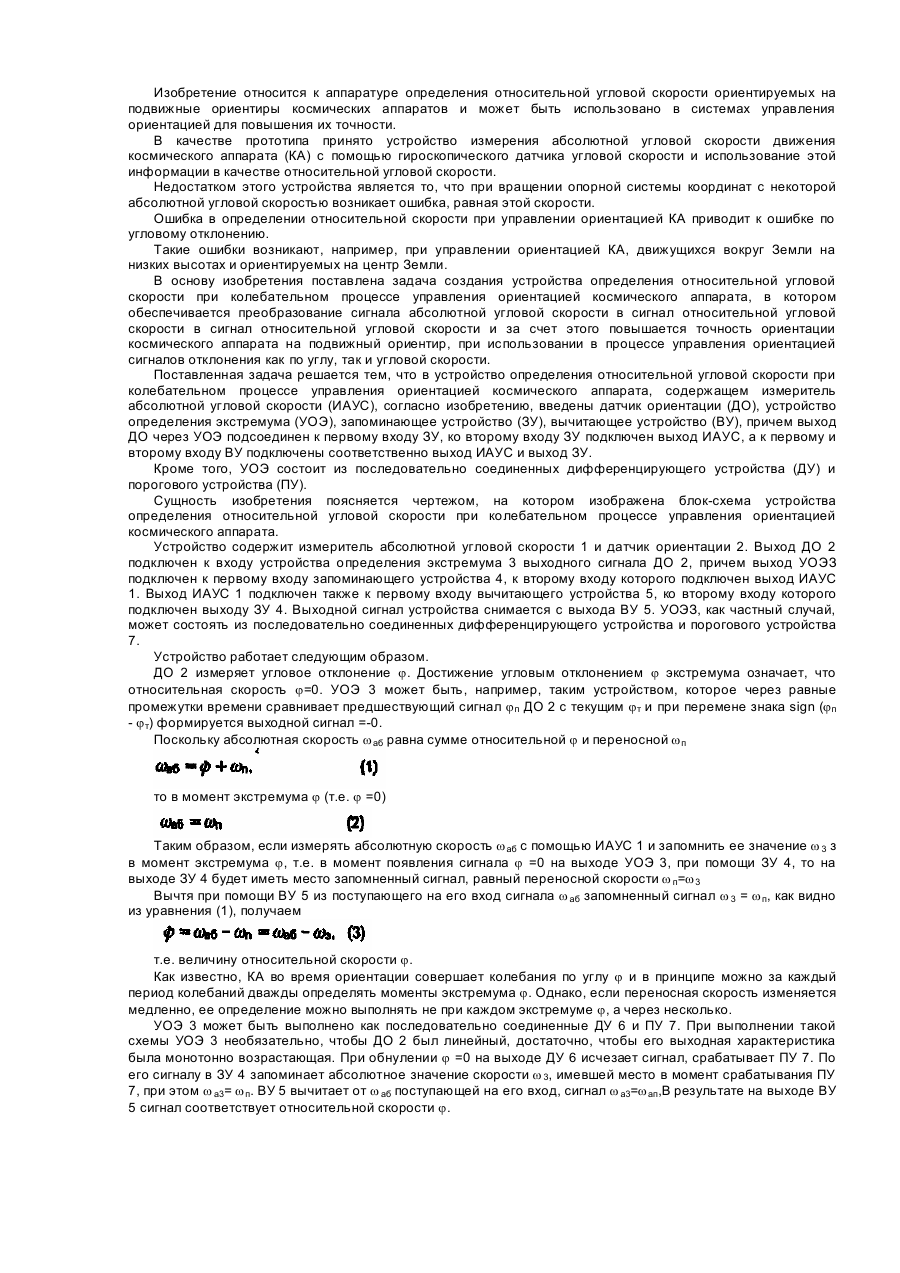
1. Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее измеритель абсолютной угловой скорости, отличающееся тем, что введены датчик ориентации, устройство определения экстремума, запоминающее устройство и вычитающее устройство, причем выход датчика ориентации через устройство определения экстремума подсоединен к первому входу запоминающего устройства,...
Спосіб розвантаження системи силових гіроскопів космічного апарата
Номер патенту: 62147
Опубліковано: 15.12.2003
Автори: Бандура Іван Миколайович, Кузнєцов Юрій Олексійович, Голоскоков Євген Григорович, Успенський Валерій Борисович
МПК: B64G 1/24
Мітки: апарата, розвантаження, системі, силових, космічного, гіроскопів, спосіб
Формула / Реферат:
Спосіб розвантаження системи силових гіроскопів космічного апарата, який полягає в тому, що вимірюють вектор нагромадженого кінетичного моменту системи силових гіроскопів, вимірюють вектор абсолютної кутової швидкості космічного апарата, визначають сумарний вектор кінетичного моменту космічного апарата, виконують розвантаження за допомогою реактивних двигунів орієнтації, який відрізняється тим, що фіксують момент досягнення допустимого...
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Войченко Оксана Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: вісесиметричного, літального, спосіб, швидкостей, кутових, демпфірування, апарата, космічного
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Пристрій визначення відносної кутової швидкості при коливальному процесі керування орієнтацією космічного апарата
Номер патенту: 25409
Опубліковано: 30.10.1998
Автори: Карпачов Юрій Андрійович, Анупрієнко Генадій Ефремович
МПК: B64G 1/24
Мітки: визначення, коливальному, апарата, кутової, пристрій, орієнтацією, відносної, швидкості, керування, космічного, процесі
Формула / Реферат:
Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее датчик, измеритель абсолютной угловой скорости в виде датчика угловой скорости, отличающееся тем, что введены датчик: ориентации, устройство определения момента времени прохождения экстремума выходного сигнала датчика ориентации, запоминающее устройство сигнала измерителя абсолютной угловой скорости и...
Спосіб формування керуючого моменту для космічного апарата
Номер патенту: 65322
Опубліковано: 15.03.2004
Автори: Кузякін Юрій Петрович, ТРОНЬ ЮРІЙ ОПАНАСОВИЧ
МПК: B64G 1/28
Мітки: моменту, спосіб, керуючого, космічного, формування, апарата
Формула / Реферат:
Спосіб формування керуючого моменту для космічного апарата шляхом використання кінетичного моменту, що створюється двигуном-маховиком, який відрізняється тим, що вимірюють кутову швидкість першого електроприводу, отримане значення масштабують, алгебраїчно сумують з сигналом завдання та формують сигнал управління другим електроприводом пропорційно отриманій різниці, вимірюють сигнал другого електроприводу, отримане значення масштабують та...
Попередній патент: Кремово-збивні цукерки з комбінованим корпусом “мулаточка”
Наступний патент: Спосіб корекції мелатоніном нефротоксичної дії солей алюмінію і свинцю
Випадковий патент: Спосіб виготовлення металевої смуги, металева смуга та металева деталь, які містять покриття, з покращеною якістю поверхні