Безконтактна синхронна електрична машина
Номер патенту: 88133
Опубліковано: 25.02.2014
Автори: Бейлін Георгій Володимирович, Петренко Сергій Юрійович, Сидоренко Юрій Григорович






Формула / Реферат
1. Безконтактна синхронна електрична машина, що включає корпус, в якому встановлені гладкий з обмоткою безпазовий статор, що охоплює явнополюсний ротор з постійними магнітами, розташований з можливістю обертання навколо своєї осі, яка відрізняється тим, що форма ротора утворена з двох однакових співвісних перерізаних конусів, що мають спільну більшу основу, машина має два однакових статори з узгодженими обмотками, встановлені з можливістю їх осьового взаємного одночасного переміщення у протилежних напрямках, поверхня кожного статора, звернута до конічної поверхні ротора, виконана конічною, вершина конуса кожної частини ротора та відповідного статора направлені у один бік, а машина забезпечена пристроєм для осьового взаємного одночасного переміщення статорів відносно корпуса.
2. Безконтактна синхронна електрична машина за п. 1, яка відрізняється тим, що пристрій для осьового взаємного одночасного переміщення статорів відносно корпуса, виконаний у вигляді рушія та гвинтового механізму, що включає ходовий гвинт, який має частини з лівосторонньою та з правосторонньою різьбою, з'єднаних з гайками, жорстко закріпленими у відповідних статорах, а механізм кінематично сполучений з рушієм.
Текст
Реферат: Безконтактна синхронна електрична машина, що включає корпус, в якому встановлені гладкий з обмоткою безпазовий статор, що охоплює явнополюсний ротор з постійними магнітами, розташований з можливістю обертання навколо своєї осі, причому форма ротора утворена з двох однакових співвісних перерізаних конусів, що мають спільну більшу основу, машина має два однакових статори з узгодженими обмотками, встановлені з можливістю їх осьового взаємного одночасного переміщення у протилежних напрямках, поверхня кожного статора, звернута до конічної поверхні ротора, виконана конічною, вершина конуса кожної частини ротора та відповідного статора направлені у один бік, а машина забезпечена пристроєм для осьового взаємного одночасного переміщення статорів відносно корпуса. UA 88133 U (12) UA 88133 U UA 88133 U 5 10 15 20 25 30 35 40 45 50 55 60 Пропонована корисна модель належить до конструкцій електричних машин, а саме - до безконтактної синхронної електричної машини, призначеної для її застосування у системах приводів транспортних засобів з можливістю рекуперації енергії та в системах накопичення енергії з супермаховиками. Синхронна машина - це електрична машина змінного струму, частота обертання ротора якої дорівнює частоті обертання магнітного поля у повітряному зазорі між статором і ротором. Найбільш близькою до пропонованої за кількістю суттєвих ознак є безконтактна синхронна електрична машина, що включає корпус, в якому встановлені гладкий з обмоткою безпазовий статор, що охоплює явнополюсний ротор з постійними магнітами, розташований з можливістю обертання навколо своєї осі [Патент на винахід № 2161852 Росія, МПК 7 Н02К21/14, Н02К5/132, Н02К15/04, Н02КЗ/04; Опубліковано: 10.01.2001]. Згадана машина є недостатньо ефективною при її використанні у електроприводі транспортного засобу, що працює з можливістю рекуперації енергії. Це пов'язане з технологічними складностями регулювання швидкості обертання ротору. Так, для регулювання швидкості електричних двигунів застосовують або зміну напруги живлючого електричного струму, який подають на обмотку статора двигуна, або шляхом зміни частоти живлючого струму, або шляхом переключення кількості пар полюсів. У генераторах же з постійними магнітами суттєво ускладнена стабілізація напруги під час коливань навантаження і частоти обертів ротора, оскільки в таких машинах відсутній зворотний магнітний зв'язок, як наприклад, у генераторах з обмоткою збудження. При цьому слід зважити і на те, що швидкість обертання, наприклад колеса автомобіля, потрібно змінювати у широких межах - від 0 до 2 000 обертів на хвилину, а швидкість обертання маховиків може знаходитись у межах від 3 000 до 60 000 обертів на хвилину, тому мотор-генератор, суміщений з супермаховиком чи колесом, повинен стабільно приймати і віддавати потужність у всьому діапазоні швидкостей. Так, двигун на малих обертах повинен вести себе, як моментний, а на великих - як високооборотний. Генератор, по можливості, повинен мати максимальний коефіцієнт корисної дії (к.к.д.) і достатню вихідну напругу у всьому діапазоні частот обертання. Але, традиційний моментный двигун недостатньо ефективно піддається регулюванню на підвищених обертах, а швидкісний - на малих. Вихідна напруга ж генератора лінійно залежить від обертів. Зважаючи на сказане, описана машина є недостатньо ефективною при її застосуванні у рушіях транспортних засобів. Звичайно, регулювання швидкості обертання вала рушія з електричною машиною можна здійснити і механічним шляхом, застосовуючи між валом електричної машини та вихідним валом рушія редуктори, варіатори тощо. Але при цьому вага і собівартість рушія з такою машиною зростають у рази, що обмежує згадану можливість регулювання швидкості обертання вихідного валу рушія. У основу пропонованої корисної моделі поставлена задача створення такої електричної машини, яка б була більш ефективною за рахунок створення умов для механічного регулювання швидкості обертання ротору без використання в ній редукторів, а шляхом зміни величини зазору між статором і ротором, що дозволило б застосовувати її у рушіях транспортних засобів. Поставлена задача вирішується пропонованою машиною, що, як і відома безконтактна синхронна електрична машина, включає корпус, в якому встановлені гладкий з обмоткою безпазовий статор, що охоплює явнополюсний ротор з постійними магнітами, розташований з можливістю обертання навколо своєї осі, а, відповідно до пропонованої корисної моделі, форма ротора утворена з двох однакових співвісних перерізаних конусів, що мають спільну більшу основу, машина має два однакових статори з узгодженими обмотками, встановлені з можливістю їх осьового взаємного одночасного переміщення у протилежних напрямках, поверхня кожного статора, звернута до конічної поверхні ротора, виконана конічною, вершина конуса кожної частини ротора та відповідного статора направлені у один бік, а машина забезпечена пристроєм для осьового взаємного одночасного переміщення статорів відносно корпуса. Особливістю пропонованої безконтактної синхронної електричної машини є і те, що пристрій для осьового взаємного одночасного переміщення статорів відносно корпуса, виконаний у вигляді рушія та гвинтового механізму, що включає ходовий гвинт, який має частини з лівосторонньою та з правосторонньою різьбою, з'єднаних з гайками, жорстко закріпленими у відповідних статорах, а механізм кінематично сполучений з рушієм. Відомо, що індукована у обмотці електрорушійна сила (е. р. с.) Е залежить від числа обертів і магнітного потоку й визначається з виразу: Е= с*n*Ф де с - постійний для даної машини коефіцієнт; 1 UA 88133 U 5 10 15 20 25 30 35 40 45 50 55 60 n - число обертів ротора за хвилину; Ф - магнітний потік електродвигуна. А отже, змінюючи значення магнітного потоку Ф двигуна-електрогенератора, у пропонованій машині шляхом зміни значення зазору між статором і ротором, можна управляти його силовими (крутним моментом) і швидкісними параметрами (вихідною напругою). Для підвищення ефективності регулювання пропонована машина забезпечена двома однаковими статорами з конічними поверхнями, звернутими до відповідних конічних поверхонь ротора. При цьому статори встановлені з можливістю їх осьового взаємного одночасного переміщення у протилежних напрямках. Перехід від традиційної схеми електричного двигуна-генератора з фіксованим робочим зазором між циліндричними статорами і ротором до пропонованого - з двостороннім конічним ротором та двома, спряженими з ним, статорами з конічною внутрішньою розточкою дає можливість для регулювання зазору між статорами і ротором (індукцію у зазорі) шляхом осьового одночасного переміщення у протилежних напрямках статорів всередині корпуса, а значить, механічно змінювати робочі характеристики електричної машини - електродвигунагенератора. При цьому осьове одночасне переміщення у протилежних напрямках статорів всередині корпуса не призводить до виникнення осьових сил, що діють на ротор, завдяки симетричності конструкції - використанню двох однакових статорів і ротора з двох однакових конічних частин. Конусність статорів і відповідних частин ротора для пропонованої машини визначають із технологічних завдань, для яких призначена пропонована машина. Так, двоконусний ротор з тупими кутами при вершинах дає можливість при малих осьових переміщеннях статорів отримувати більшу зміну величини робочого зазору (індукції у зазорі), тобто здійснювати швидку перебудову електромотора при зменшенні точності. І, навпаки, - двоконусний ротор з гострими кутами при вершинах дає можливість при малих осьових переміщеннях статорів отримувати малу зміну величини робочого зазору (індукції у зазорі), тобто здійснювати плавну перебудову електромотору з високою точністю. Конусність - це відношення діаметра кола основи конуса до його висоти для повних конусів або відношення різниці двох торцевих поперечних перерізів до відстані між ними для перерізаних конусів. Також конусність може бути задана кутом вершини конуса (α). Половина кута вершини конуса називається кутом конуса (α/2) [інформація з сайту http://ru.wikipedia.org/wiki/%D0 %9A%D0 %BE%D0 %BD%D1 %83 %D1 %81 %D0 %BD%D0 % BE%D1 %81 %D1 %82 %D1 %8C]. Суть пропонованої корисної моделі пояснюється схематичними кресленнями. На фіг. 1 показано пропоновану машину у положенні з мінімальним зазором між статором і ротором. На фіг. 2 показано пропоновану машину у положенні з максимальним зазором між статором і ротором. Пропонована безконтактна синхронна електрична машина, призначена для роботи у якості рушія автомобіля чи накопичувача механічної енергії - маховика /не показано/ і включає корпус 1, в якому встановлені два однакових статори 2 і 3 з узгодженими обмотками та явнополюсний ротор 4 з постійними магнітами. Статори 2 і 3 охоплюють ротор 4, що розташований у корпусі 1 з можливістю обертання навколо своєї осі. Форма ротора 3 утворена з двох однакових співвісних перерізаних конусів, що мають спільну більшу основу. Поверхня кожного статора 2 і 3, звернута до конічної поверхні ротора 4, виконана конічною, вершина конуса кожної частини ротора 4 та відповідного статора 2 або 3 направлені у один бік. Статори 2 і 3 встановлені з можливістю їх осьового взаємного одночасного переміщення у протилежних напрямках і забезпечені відповідним пристроєм для осьового взаємного одночасного переміщення статорів відносно корпуса. Згаданий пристрій виконаний у вигляді рушія /не показано/ та гвинтового механізму, що включає ходовий гвинт 5, який має частини з лівосторонньою та з правосторонньою різьбою, з'єднаних з гайками 6, жорстко закріпленими у відповідних статорах 2 і 3. При цьому статори 2 і 3 розташовані симетрично відносно середньої точки ходового гвинта 5. Ходовий гвинт 5 механізму кінематично сполучений з рушієм. Як рушій може бут застосований невеликий електродвигун, система управління яким забезпечена комутаційним пристроєм та двома кінцевими вимикачами, призначеними для зміни напрямку обертання вала електродвигун /не показано/. Як приклад, показана робота пропонованої машини, призначеної для її застосування як рушій автомобіля чи накопичувача-маховика для нього. На початку роботи, коли для зрушування автомобіля чи початку обертання маховика потрібний досить великий крутний момент при низьких чи помірних обертах, зазор між відповідними конічними поверхнями частин ротора 4 і статорів 2 та 3 є мінімальним (фіг. 1). Саме мінімальний зазор забезпечує отримання 2 UA 88133 U 5 10 15 20 25 максимального крупного моменту, оскільки дозволяє отримати магнітний потік, значення якого є найбільшим. У такому положенні статорів 2 і 3 відносно ротора 4 при фіксованому значенні напруги живлючого струму отримують фіксоване максимальне значення частоти обертів ротора 4. Після досягнення ротором 4 цієї частоти пристрій для осьового взаємного одночасного переміщення статорів відносно корпуса здійснює розсування статорів 2 і 3 один від одного вздовж їх спільної осі у протилежних напрямках, збільшуючи при цьому зазор між відповідними конічними поверхнями частин ротора 4 та статорів 2 і 3 до отримання максимального значення зазору між конічними поверхнями статорів 2 та 3 і ротора 4 (фіг. 2). При цьому відбувається збільшення швидкості обертання ротора 4 і зменшення крутного моменту. Коли машина працює як генератор, при змінному зазорі між статорами 2, 3 і ротором 4, генератор дозволяє отримувати вихідну напругу, значення якої несуттєво змінюється за амплітудою у широкому діапазоні частот обертання ротора 4. Положення статорів 2 і 3 на фіг. 1 відповідає малій та середній частоті обертів ротора 4. Положення ж статорів 2 і 3 на фіг. 2 відповідає великій і дуже великій частоті обертання ротора 4. За допомогою такого генератора можна отримати енергію з накопичувача у вигляді маховика у всьому діапазоні частот обертання навіть до повної зупинки ротора, що є неможливим у традиційних генераторах. При максимальному зазорі між конічними поверхнями статорів 2 та 3 і ротора 4 зменшується паразитний тормозний момент генератора, що позитивно впливає на термін зберігання накопленої у накопичувачі-маховику енергії. В залежності від особливостей застосування пропонованої машини ротор 4 може бути розташований як всередині, так і ззовні статорів 2 і 3. А отже, пропонована електрична машина є більш ефективною за машину-прототип за рахунок створення у ній умов для механічного регулювання швидкості обертання ротора 4 шляхом зміни значення зазору між статорами 2, 3 і відповідними частинами ротора 4. Машина дозволяє легко управляти її параметрами - силовими (крутним моментом) і швидкісними (вихідною напругою). Її простота, а тому підвищена надійність, надають можливість для її застосування у рушіях транспортних засобів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 1. Безконтактна синхронна електрична машина, що включає корпус, в якому встановлені гладкий з обмоткою безпазовий статор, що охоплює явнополюсний ротор з постійними магнітами, розташований з можливістю обертання навколо своєї осі, яка відрізняється тим, що форма ротора утворена з двох однакових співвісних перерізаних конусів, що мають спільну більшу основу, машина має два однакових статори з узгодженими обмотками, встановлені з можливістю їх осьового взаємного одночасного переміщення у протилежних напрямках, поверхня кожного статора, звернута до конічної поверхні ротора, виконана конічною, вершина конуса кожної частини ротора та відповідного статора направлені у один бік, а машина забезпечена пристроєм для осьового взаємного одночасного переміщення статорів відносно корпуса. 2. Безконтактна синхронна електрична машина за п. 1, яка відрізняється тим, що пристрій для осьового взаємного одночасного переміщення статорів відносно корпуса, виконаний у вигляді рушія та гвинтового механізму, що включає ходовий гвинт, який має частини з лівосторонньою та з правосторонньою різьбою, з'єднаних з гайками, жорстко закріпленими у відповідних статорах, а механізм кінематично сполучений з рушієм. 3 UA 88133 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюSidorenko Yurii Hryhorovych, Beilin Heorhii Volodymyrovych, Petrenko Serhii Yuriiovych
Автори російськоюСидоренко Юрий Григорьевич, Бейлин Георгий Владимирович, Петренко Сергей Юрьевич
МПК / Мітки
МПК: H02K 1/06, H02K 19/02
Мітки: електрична, синхронна, безконтактна, машина
Код посилання
<a href="https://ua.patents.su/6-88133-bezkontaktna-sinkhronna-elektrichna-mashina.html" target="_blank" rel="follow" title="База патентів України">Безконтактна синхронна електрична машина</a>
Безконтактна синхронна електрична машина
Номер патенту: 81203
Опубліковано: 25.06.2013
Автори: Сіроштан Валерій Валентинович, Клементьєв Олександр Валентинович
МПК: H02K 19/16
Мітки: синхронна, електрична, безконтактна, машина
Формула / Реферат:
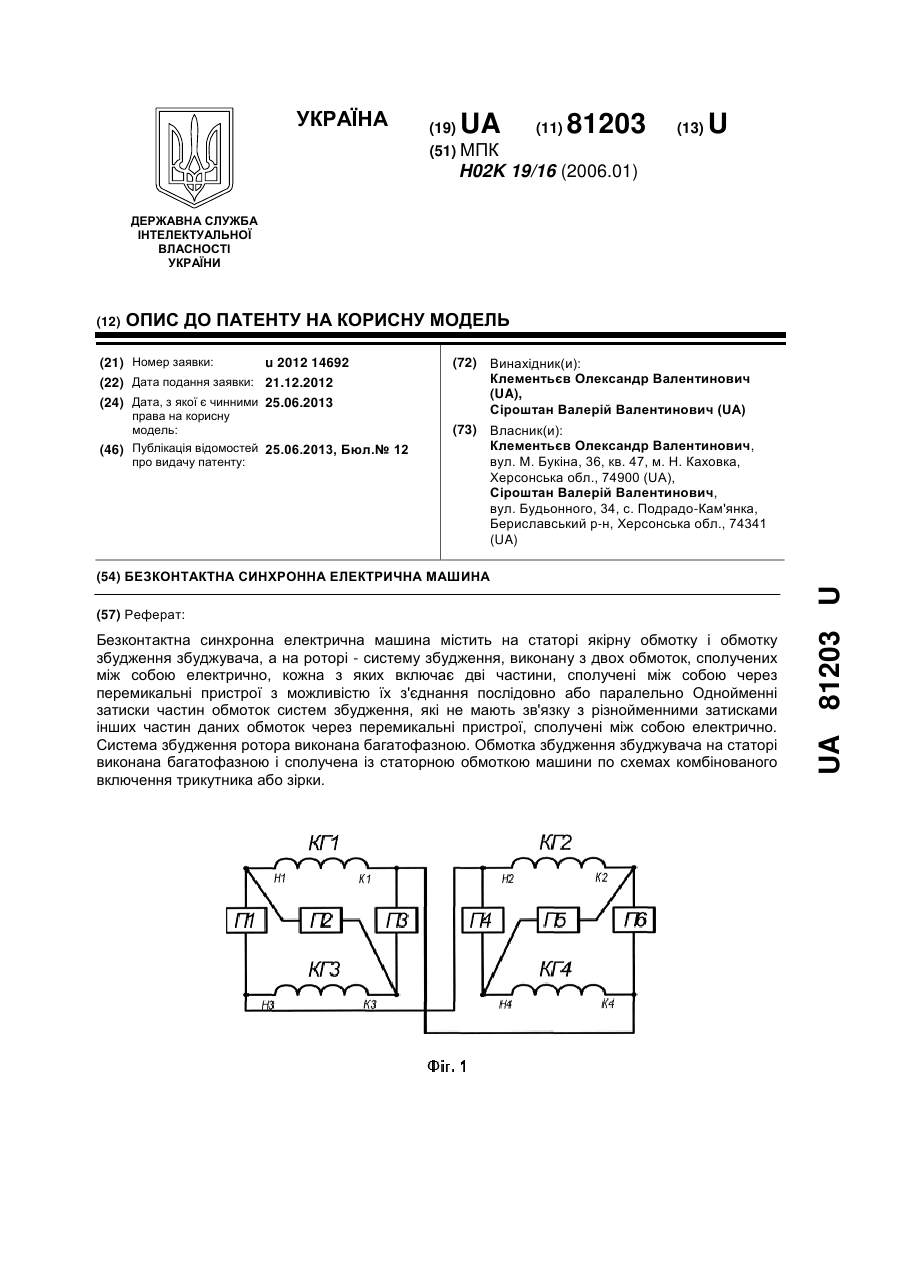
Безконтактна синхронна електрична машина, що містить на статорі якірну обмотку і обмотку збудження збуджувача, а на роторі - систему збудження, виконану щонайменше з двох обмоток, сполучених між собою електрично, кожна з яких включає щонайменше дві частини, сполучені між собою через перемикальні пристрої з можливістю їх з'єднання послідовно або паралельно, при цьому однойменні затиски частин обмоток систем збудження, які не мають зв'язку з...
Безконтактна синхронна електрична машина
Номер патенту: 68582
Опубліковано: 16.08.2004
Автори: Китаєв Олександр Васильович, Климентьєв Олександр Валентинович, Якимчук Георгій Сергійович
МПК: H02K 19/16
Мітки: машина, електрична, синхронна, безконтактна
Формула / Реферат:
Безконтактна синхронна електрична машина, що містить на статорі якірну обмотку й обмотку збудження збудника, а на роторі - систему збудження, виконану щонайменше з двох обмоток, з'єднаних між собою електрично, кожна з яких включає щонайменше дві частини, з'єднані між собою через перемикаючий пристрій з можливістю їх вмикання послідовно чи паралельно, при цьому однойменні затискачі частин обмоток системи збудження, що не мають зв'язку з...
Безконтактна синхронна електрична машина

Номер патенту: 50195
Опубліковано: 15.10.2002
Автори: Клементьєв Олександр Валентинович, Якимчук Георгій Сергійович, Олейников Олександр Михайлович, Китаєв Олександр Васильович
МПК: H02K 19/16
Мітки: машина, синхронна, безконтактна, електрична
Формула / Реферат:
Безконтактна синхронна електрична машина, що містить на статорі якірну обмотку й обмотку збудження збудника, а на роторі - систему збудження, виконану щонайменше з двох обмоток, з'єднаних між собою електрично, кожна з яких включає щонайменше дві частини, з'єднані між собою через перемикальний пристрій з можливістю їх вмикання послідовно або паралельно, при цьому однойменні затискачі частин обмоток системи збудження, що не мають зв'язку з...
Безконтактна синхронна електрична машина

Номер патенту: 38330
Опубліковано: 15.05.2001
Автори: Клементьєв Олександр Валентинович, Якимчук Георгій Сергійович, Китаєв Олександр Васильович
МПК: H02K 19/16
Мітки: синхронна, безконтактна, машина, електрична
Текст:
...і 6 наводиться ЕРС, під впливом яких в замкнути х контурах тече стр ум, випрямлений діодами 9, 10, 11. Постійна складова струму є струмом збудження машини, що створює її основне магнітне поле, яке необхідне для наведення трифазної системи ЕРС в обмотці якоря 1 з частотою f. Однак, випрямлений струм крім постійної складової має вищі гармоніки, з яких визначальну роль грає основна. Вона створює магнітне поле полюсністю 2р, яке індукує в...
Безконтактна синхронна електрична машина

Номер патенту: 50493
Опубліковано: 15.10.2002
Автори: Якимчук Георгій Сергійович, Клементьєв Олександр Валентинович, Китаєв Олександр Васильович
МПК: H02K 19/16
Мітки: машина, електрична, синхронна, безконтактна
Формула / Реферат:
Безконтактна синхронна електрична машина, що містить на статорі якірну обмотку й обмотку збудження збудника, а на роторі - систему збудження, виконану щонайменше з двох обмоток, з'єднаних між собою електрично, кожна з яких включає щонайменше дві частини, з'єднані між собою через пристрої, що переключаються, з можливістю їхнього включення чи послідовно чи паралельно, при цьому однойменні затискачі частин обмоток системи збудження, що не мають...
Попередній патент: Спосіб визначення порушень в системі антиоксидантного захисту організму при мікросатурнізмі
Наступний патент: Спосіб прогнозування виникнення ускладнень та летальності у новонароджених із синдромом дихальних розладів, які потребують проведення штучної вентиляції легень
Випадковий патент: Вологомір