Пневматичний кроковий двигун
Номер патенту: 88851
Опубліковано: 10.04.2014
Автори: Полівцев Владимир Вікторович, Копп Вадим Яковлевич, Полівцев Віктор Петрович, Осинський Юрий Александрович
Формула / Реферат
Пневматичний кроковий двигун, що містить корпус із внутрішнім зачепленням, водило, яке має шестірню з зовнішнім і внутрішнім зачепленнями, лінійні приводи, розташовані на корпусі радіально до осі обертання шестірні водила, який відрізняється тим, що він має механізм плоскопаралельного колового руху водила з втулками без можливості обертання, з'єднаних двома пружними сильфонними муфтами з нерухомими кришками корпусу і шестірні, встановленої з можливістю обертання на двох підшипникових опорах, з'єднаної муфтою з першим валом, встановленим з можливістю обертання відносно другого, і яка взаємодіє своїм зовнішнім зачепленням із внутрішнім зачепленням корпусу, а своїм внутрішнім зачепленням - із зовнішнім зачепленням другого вала, двома рядами приводів, що взаємодіють своїми штоками з втулками водила, забезпечуючи валам роздільний безперервний рух в одному напрямку, з різними швидкостями, покроковий режим руху та зупинки.
Текст
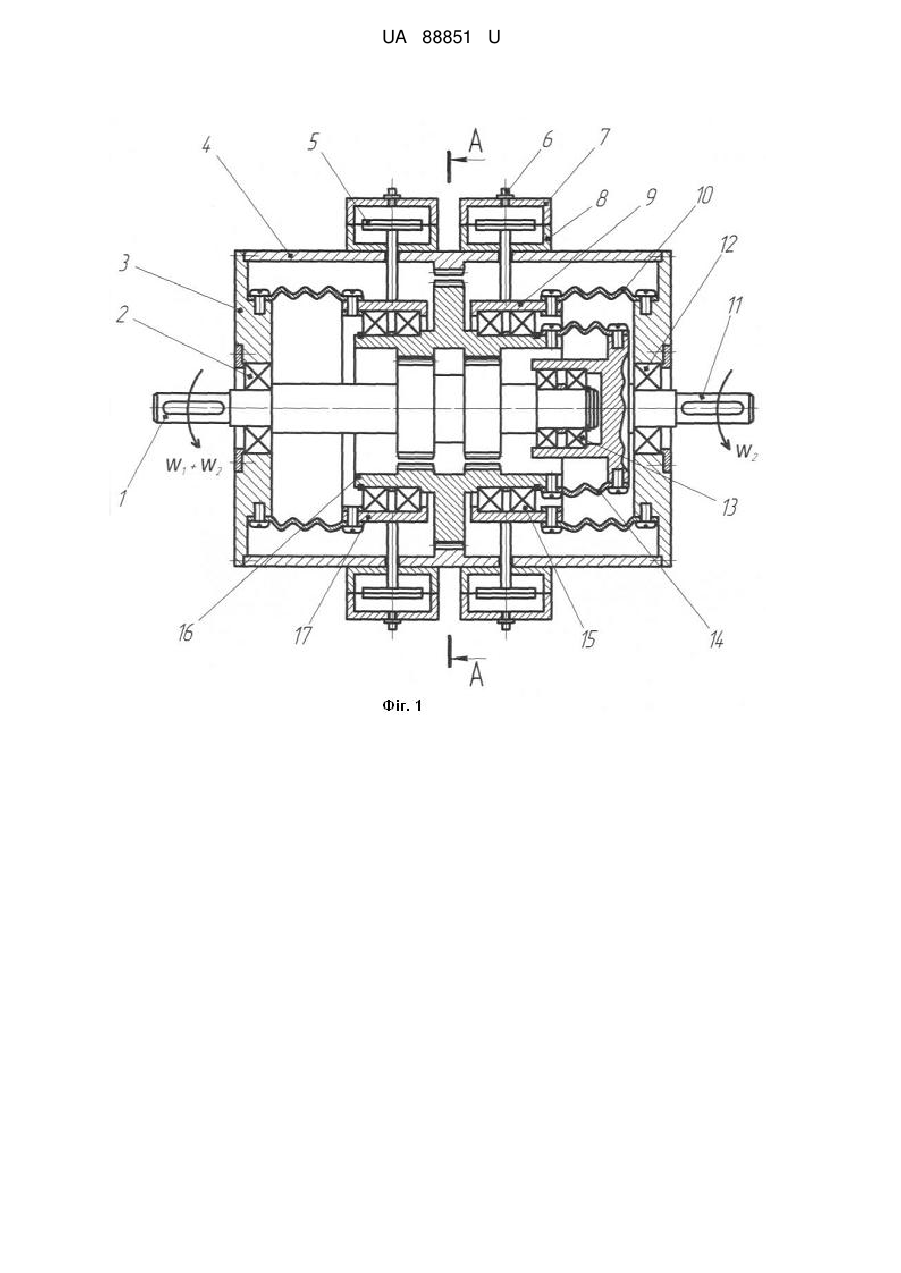
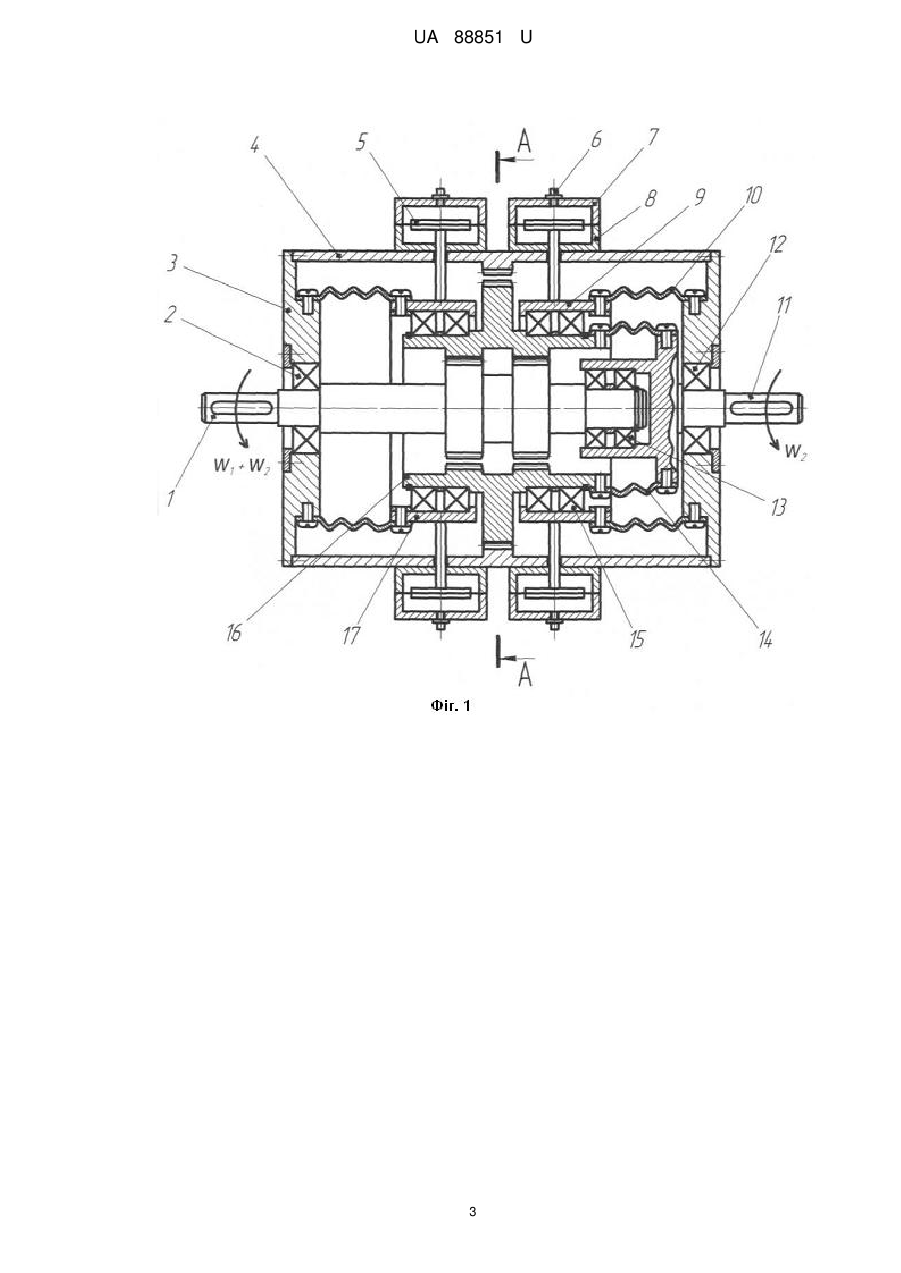
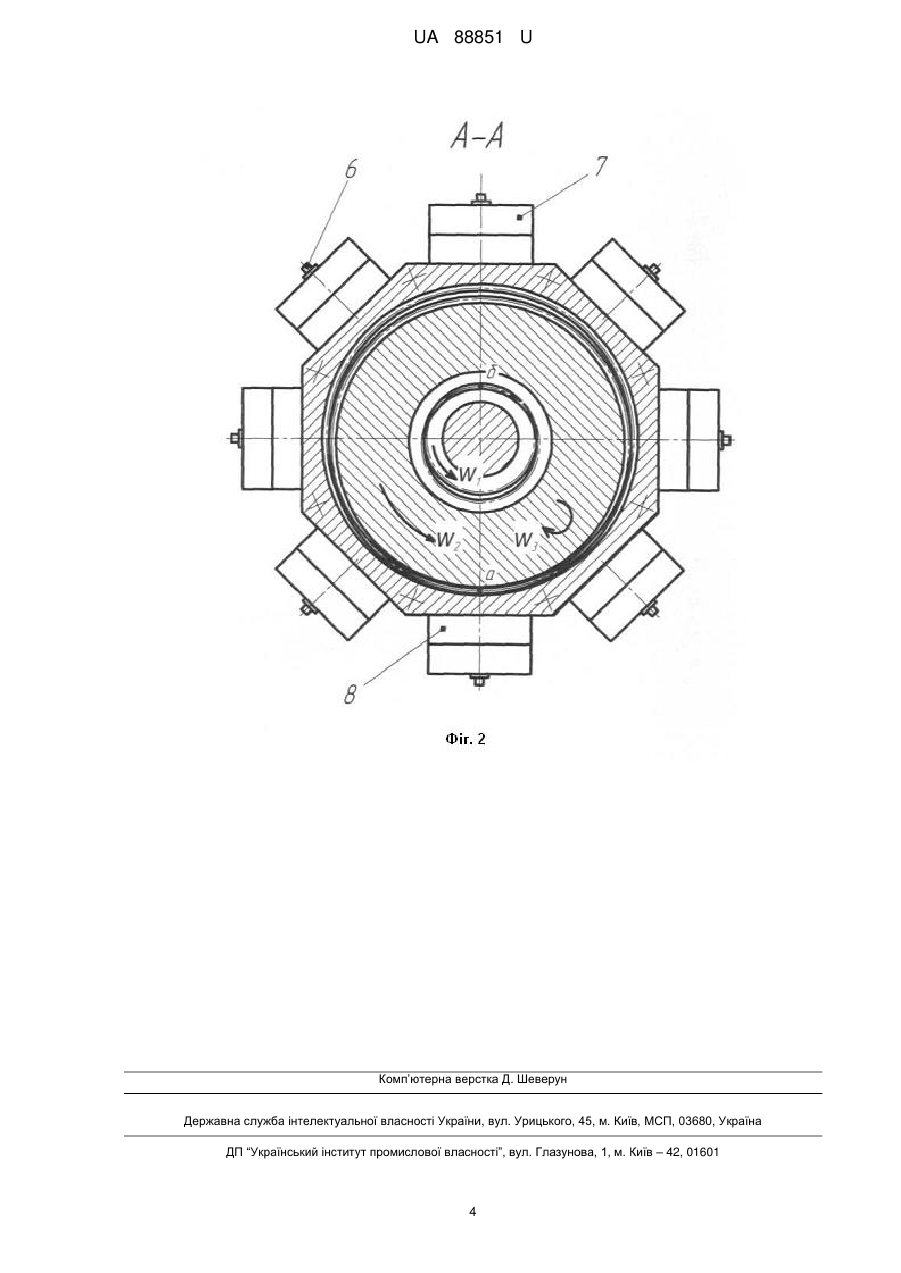
Реферат: Пневматичний кроковий двигун містить вали, підшипники, втулки, муфти, нерухомі кришки, шестерні, корпус, штуцер, півкорпус, шестерні, зовнішнє зачеплення вала, підшипники. UA 88851 U (54) ПНЕВМАТИЧНИЙ КРОКОВИЙ ДВИГУН UA 88851 U UA 88851 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до машинобудування, для створення засобів автоматизації в машинобудуванні, модулів промислових роботів, механотронних систем автоматичних ліній. Відомі приводи на основі пневматичних виконавчих органів маніпулятора, призначених для перетворення колових коливальних рухів або дискретних лінійних приводів в обертальний або лінійний рух виконавчої ланки. За аналог взято пристрій модуль маніпулятора (SU 1442393 А1 В25J 11/00, Бюл. № 45 від 07.12.88), призначеного для лінійного переміщення та позиціонування каретки шляхом перетворення крокового лінійного руху мембранних приводів у плоскопаралельний коловий рух без обертання втулки шестірні, яка в свою чергу передає обертання зі зниженою швидкістю до шнека. У мембранні приводи, розташовані по колу, подається стиснене повітря. Конструкція має такі недоліки. По-перше, складність конструкції елементів для забезпечення плоскопаралельного колового руху втулки з внутрішнім зачепленням (наявність кулькової хрестової муфти й упорного підшипника). По-друге, обертовий рух шестірні перетворюється на лінійне переміщення каретки за допомогою шнека з великою втратою потужності за рахунок тертя в передачі. Найближчим аналогом вибрано пристрій - "привід повороту переважно для ланок маніпулятора" (SU 1324841 А1 В25J 9/00, 9/12, Бюл. № 27 от 23.07.87), призначений для отримання обертового руху вихідної ланки з підвищеною швидкістю, за рахунок вібратора та повзучої швидкості за рахунок лінійних мембранних приводів. В основу конструкції поставлений кульковий вібратор і пневмоприводи зворотнопоступального переміщення, кінематично зв'язані з перетворювачем плоскопаралельних колових коливань в обертовий рух зубчастого колеса та зв'язаного з ним валу. Найближчий аналог характеризується наступними недоліками. По-перше, кульковий вібратор має обмежені можливості з потужності та передаваного зусилля і, як наслідок, невеликий крутильний момент на вихідному валу. По-друге, плоско паралельний коловий рух втулки з внутрішнім зубчастим зачепленням забезпечується парою ковзання по пазам хрестоносної муфти, зі значним тертям і втратою потужності, конструктивна схема має можливість до перекосу зубчастого колеса та заклинюванню конструкції. По-третє, позиціонування неможливе з кульковим вібратором й обмежена точність позиціонування при використанні чотирилінійних мембранних приводів. По-четверте, нерівномірність зусилля, передаваного до зубчастого колеса мембранним приводом на початку і в кінці кроку при невеликій кількості приводів. В основу корисної моделі поставлено задачу забезпечення пневматичного крокового двигуна двома обертовими рухами валів з різними зниженими швидкостями, покроковий режим руху та зупинки. Поставлена задача вирішується тим, що пневматичний кроковий двигун, що містить корпус з внутрішнім зачепленням, водило, що має шестірню із зовнішнім і внутрішнім зачепленням, лінійні приводи, розташовані на корпусі радіально до осі обертання шестірні водила. Пневматичний кроковий двигун забезпечений механізмом плоскопаралельного колового переміщення водила без можливості обертання, що складається з двох втулок, з'єднаних двома пружними сильфонними муфтами з нерухомими кришками корпусу, та шестірні, встановленої з можливістю обертання навколо своєї осі на двох підшипникових опорах і з'єднаної сильфонною муфтою з валом, встановленим з можливістю обертання відносно другого. Шестірня водила взаємодіє своїм зовнішнім зачепленням з внутрішнім зачепленням корпусу, а своїм внутрішнім зачепленням із зовнішнім зачепленням другого валу. На корпусі встановлено два ряди лінійних мембранних двигунів, що взаємодіють своїми штоками з втулками водила, забезпечуючи валам роздільне безперервне обертання в одному напрямку, з різними швидкостями, покроковий режим руху та зупинки. При порівнянні аналога та найближчого аналога із запропонованим технічним рішенням видно, що воно виявляє нові властивості, які полягають у наступному: - плоскопаралельний коловий рух без обертання навколо своєї осі забезпечується двома сильфонними муфтами, що значно спрощує конструкцію механізму та підвищує надійність його роботи; - обертання можна отримувати з двох різних валів двигуна, які обертаються в одному напрямку, але з різними зниженими швидкостями (порівняно зі швидкістю плоскопаралельного руху шестірні водила); - два ряди лінійних пневматичних приводів дозволяють підвищити потужність і крутильний момент на валах крокового двигуна; 1 UA 88851 U 5 10 15 20 25 30 35 - використання двигунів, встановлених у два ряди, дозволяє застосувати різні закони для управління кроковим режимом зупинки та гальмуванням іншим рядом приводів. На фіг. 1 показано запропонований пристрій у розрізі, на фіг. 2 розріз А-А фіг. 1. Пристрій містить корпус 4 з внутрішнім зачепленням, закритий двома кришками 3, на якому розташовані шістнадцять мембранних приводів, що складаються з двох півкорпусів7 і 8, мембрани зі штоком 5, що знаходиться в контакті з втулками водила 9 і 17 (фіг. 1). Мембранні приводи мають штуцери 6 для підведення стисненого повітря до порожнин півкорпусу 7. Кроковий двигун має вал 1, встановлений у підшипниках 2 і 13. Втулки 9 і 17 у свою чергу встановлені на підшипниках 13 і з'єднані за допомогою двох сильфонних муфт з нерухомими кришками 3. Підшипники 15 закріплені на шестірні 16, яка має зовнішнє та внутрішнє зачеплення. Шестірня 16 водила з'єднана з валом 11 за допомогою сильфонної муфти 14. Вал 11 посаджаний з одного кінця на підшипники 13, а з іншого - на підшипник 12, установлений у нерухомій кришці, з'єднаній з корпусом 4. При подаванні стисненого повітря крізь штуцер 6 у порожнину півкорпусу 7, мембрана зі штоком переміщується (наприклад) униз, давлять на втулки 9, які за рахунок муфт 10 разом із шестірнею 16 зміщуються вниз і своїм зовнішнім зачепленням контактують у точці "а" з внутрішнім зачепленням шестірні корпусу 4, а внутрішнє зачеплення шестірні 9 контактує в точці "б" із зовнішнім зачепленням вала 1 (фіг. 2). При подаванні стисненого повітря до наступної пари мембранних приводів водило разом з втулками 9 і 17 здійснює плоскопаралельний коловий рух W 3 без можливості обертання за рахунок муфт 10, а шестірня 16 здійснює обертання навколо своєї осі за допомогою підшипників 15 разом з муфтою та валом 11 зі швидкістю W 2 у напрямку, протилежному обертанню W 3. Швидкість обертання валу 11 W 2 нижче швидкості колового руху втулок 9 і 17 W 3 за рахунок редукції, викликаної різною кількістю зубів внутрішнього зачеплення корпусу 4 і зовнішнього - шестірні 16 або різною довжиною ділильних окружностей зачеплення. Таким чином, шестірня 16 здійснює два рухи: плоскопаралельний рух W 3 й обертання навколо своєї осі зі швидкістю W 1 у різних напрямках. Вал 1 від взаємодії в точці "б" із зубчастим зачепленням плоскопаралельного колового руху \ W 3 шестірні 16, починає обертатися на підшипниках 2 і 13 навколо своєї осі зі швидкістю W 1, яка нижче ніж W 3 за рахунок редукції, але в протилежному напрямку (в одному напрямку з W 2). Валу 1 від шестірні 16 передається обертання зі швидкістю W 2. Таким чином, вал 1 обертається зі швидкістю W 1+W 2, вал 11 зі швидкістю W 2 в одному напрямку. Проміжок в обох зубчастих зачепленнях (корпус 4 і шестірня 16, шестірня 16 і вал 1) повинен бути однаковим. Покроковий режим роботи лінійних приводів і режим роботи з різною частотою включання приводів (з різною швидкістю плоскопаралельного руху W 3) дозволяє організовувати не тільки обертання валів 1 і 11 з регульованою швидкістю, але й покрокову їх зупинку. Вали обертаються в одному напрямку з різними зниженими швидкостями за рахунок редукції зубчастих передач. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 Пневматичний кроковий двигун, що містить корпус із внутрішнім зачепленням, водило, яке має шестірню з зовнішнім і внутрішнім зачепленнями, лінійні приводи, розташовані на корпусі радіально до осі обертання шестірні водила, який відрізняється тим, що він має механізм плоскопаралельного колового руху водила з втулками без можливості обертання, з'єднаних двома пружними сильфонними муфтами з нерухомими кришками корпусу і шестірні, встановленої з можливістю обертання на двох підшипникових опорах, з'єднаної муфтою з першим валом, встановленим з можливістю обертання відносно другого, і яка взаємодіє своїм зовнішнім зачепленням із внутрішнім зачепленням корпусу, а своїм внутрішнім зачепленням - із зовнішнім зачепленням другого вала, двома рядами приводів, що взаємодіють своїми штоками з втулками водила, забезпечуючи валам роздільний безперервний рух в одному напрямку, з різними швидкостями, покроковий режим руху та зупинки. 2 UA 88851 U 3 UA 88851 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F03C 4/00
Мітки: пневматичний, двигун, кроковий
Код посилання
<a href="https://ua.patents.su/6-88851-pnevmatichnijj-krokovijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Пневматичний кроковий двигун</a>
Електромеханічний реверсивний кроковий двигун
Номер патенту: 73219
Опубліковано: 15.06.2005
Автор: Вишневський Людвиг Федорович
МПК: H02K 37/00
Мітки: реверсивний, кроковий, електромеханічний, двигун
Формула / Реферат:
Електромеханічний реверсивний кроковий двигун, що містить вихідний кривошипний вал і нерухомо встановлений у корпусі електромагніт, на осі якоря якого жорстко закріплено кулісу, вилкою якої охоплено цапфу кривошипного вала, який відрізняється тим, що введено аналогічний електромагніт з кулісою, при цьому осі куліс зміщені відносно одна одної так, що куліси утворюють кут від 0° до 180° і з'єднані відповідними пружними зв'язками з корпусом,...
Багатополюсний кроковий двигун
Номер патенту: 8332
Опубліковано: 29.03.1996
МПК: Май Ксуан Ту /СН/, Мішель Шваб /СН/, H02K 37/00
Мітки: кроковий, двигун, багатополюсний
Текст:
...двигателе углового шага зубцов статора а* отличным от углового шага пар полюсов ротора Of и заданием связи между ними соотношением (кукуют (где К =0,8-1,2; Or -2 JT/N, где N-число пар полюсов). Подбором параметра К в указанных пределах можно значительно ослабить влияющие на позиционирование ротора паразитные моменты Мраг, являющиеся гармониками высшего ряда силового момента Mi. Например, можно добиться устранения второй и четвертой...
Двигун пневматичний

Номер патенту: 74079
Опубліковано: 17.10.2005
Автори: Поляков Сергій Іванович, Кассір Сергій Григорович, Равцов Михайло Васильович, Семиволос Олексій Олексійович
МПК: F01B 3/00
Мітки: пневматичний, двигун
Формула / Реферат:
Двигун пневматичний, що має корпус, ротор з вихідним валом, паралельні поздовжній осі вихідного вала циліндри, спарені поршні подвійної дії з роликами, золотники з розподільними каналами, який відрізняється тим, що на периферії ротора є праві та ліві гвинтові пази, бокові поверхні яких з'єднані концентричними поверхнями, ролики розміщені в гвинтових пазах із суміщенням центра ролика з поздовжньою віссю циліндра, а спарені поршні подвійної дії...
Пневматичний двигун

Номер патенту: 22720
Опубліковано: 25.04.2007
Автори: П'ятак Олександр Іванович, Кудрявцев Ігор Миколайович, Дем'яненко Юрій Володимирович, Муринець-Маркевич Борис Миколайович, Бондаренко Станіслав Іванович
МПК: F02B 43/00
Мітки: двигун, пневматичний
Формула / Реферат:
Пневматичний двигун, що містить циліндр, в якому з можливістю зворотно-поступального руху розміщений поршень, з'єднаний з кривошипно-шатунним механізмом, розміщену в порожнині циліндра нагнітальну порожнину, з'єднану отвором з додатковою порожниною змінного об'єму, впускну порожнину, відділену від нагнітальної порожнини стінкою, в якій встановлений впускний клапан, зв'язаний за допомогою штока з поршнем, ємність для стисненого газу, сполучену...
Пневматичний двигун

Номер патенту: 75874
Опубліковано: 10.12.2012
Автори: Трубянов Юрій Валентинович, Марченко Олексій Сергійович, Кулаковська Вікторія Валеріївна, Мирошниченко Дмитро Євгенович
МПК: F02B 43/00
Мітки: двигун, пневматичний
Формула / Реферат:
1. Пневматичний двигун, що містить корпус і розташований усередині нього виконавчий механізм, що перетворює енергію стисненого робочого середовища в механічну роботу, виконаний у вигляді робочої камери зі змінюваним об'ємом з поршнем, що рухається усередині неї, кінематично пов'язаний з валом відбору потужності двигуна за допомогою механізму перетворення руху поршня в обертовий рух вала відбору потужності, і розділяє камеру на робочі...
Попередній патент: Міні-котедж з підйомною верандою
Наступний патент: Програмно-технічний комплекс “станція”
Випадковий патент: Герметичне різьбове з'єднання нафтопромислових труб