Електромеханічний реверсивний кроковий двигун
Формула / Реферат
Електромеханічний реверсивний кроковий двигун, що містить вихідний кривошипний вал і нерухомо встановлений у корпусі електромагніт, на осі якоря якого жорстко закріплено кулісу, вилкою якої охоплено цапфу кривошипного вала, який відрізняється тим, що введено аналогічний електромагніт з кулісою, при цьому осі куліс зміщені відносно одна одної так, що куліси утворюють кут від 0° до 180° і з'єднані відповідними пружними зв'язками з корпусом, причому кривошипний вал встановлено з можливістю взаємодії з обома кулісами при його повороті.
Текст
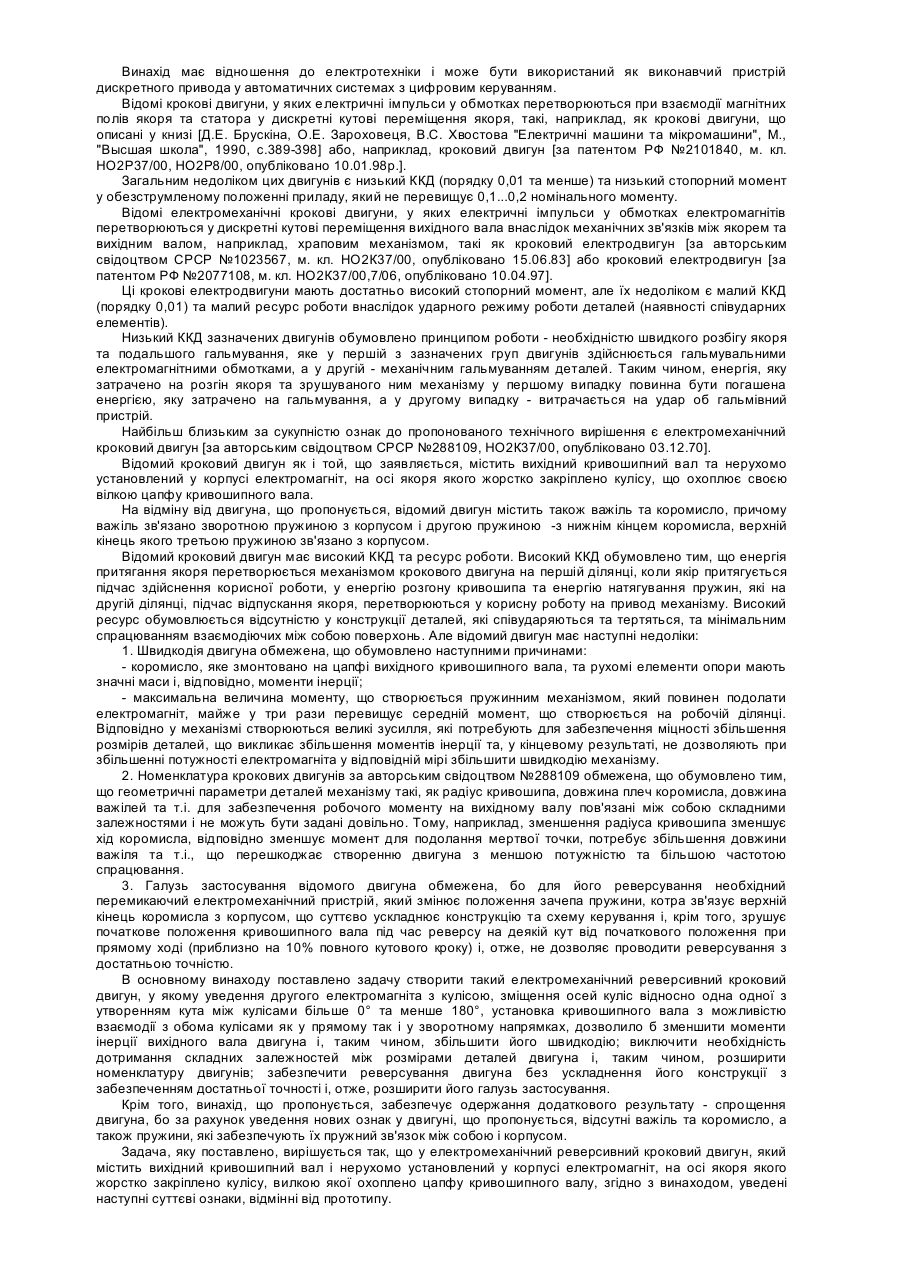
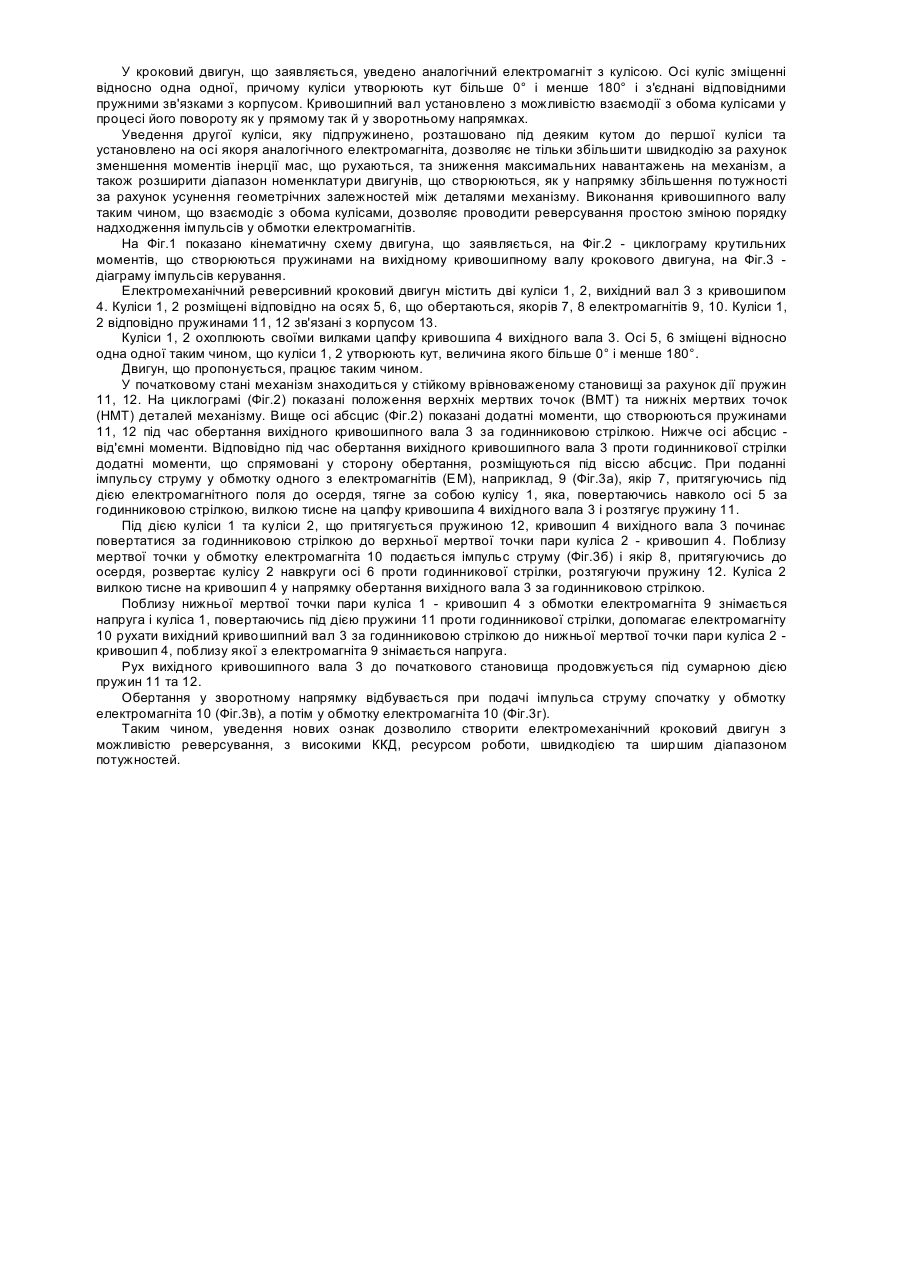
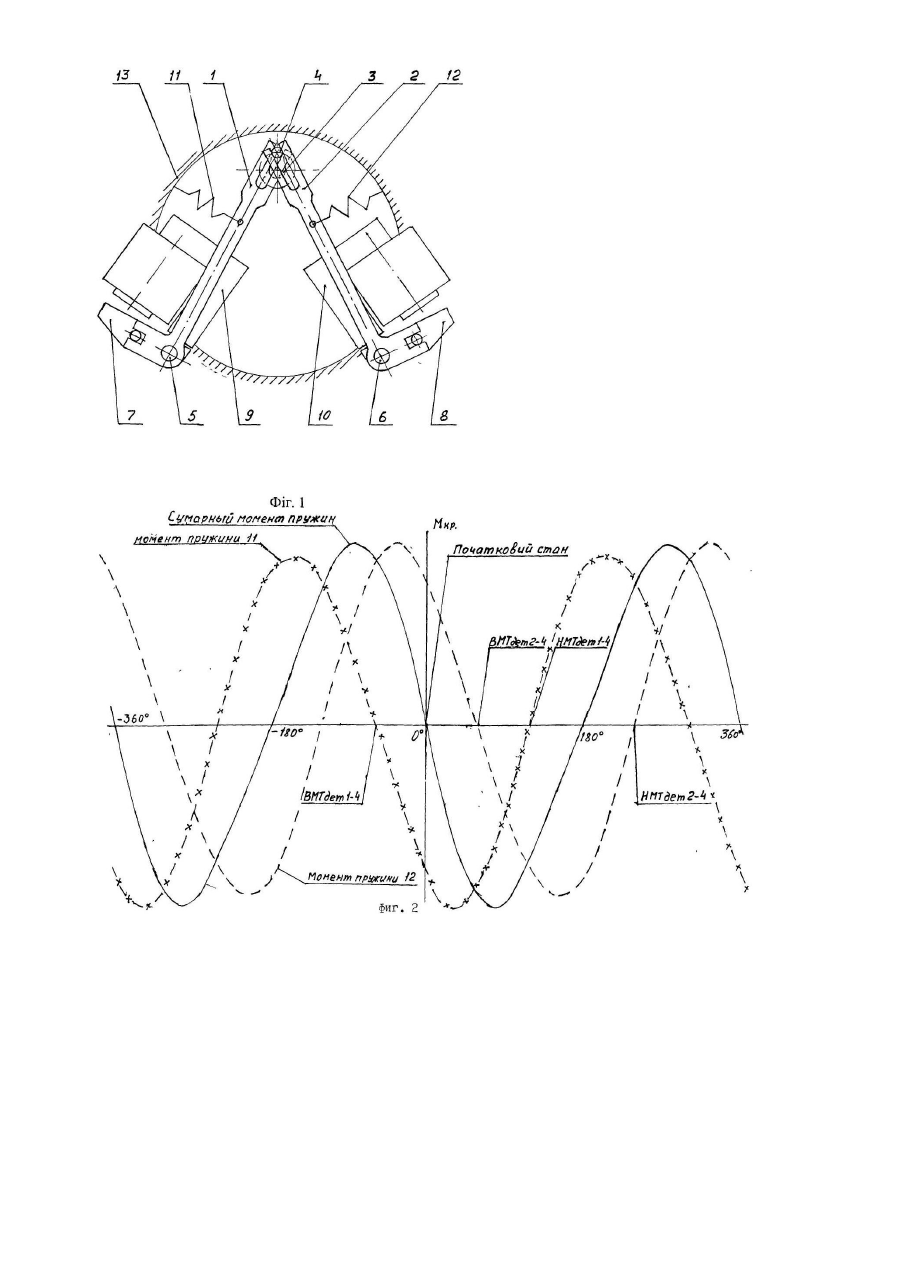
Винахід має відношення до електротехніки і може бути використаний як виконавчий пристрій дискретного привода у автоматичних системах з цифровим керуванням. Відомі крокові двигуни, у яких електричні імпульси у обмотках перетворюються при взаємодії магнітних полів якоря та статора у дискретні кутові переміщення якоря, такі, наприклад, як крокові двигуни, що описані у книзі [Д.Е. Брускіна, О.Е. Зароховеця, B.C. Хвостова "Електричні машини та мікромашини", М., "Высшая школа", 1990, с.389-398] або, наприклад, кроковий двигун [за патентом РФ №2101840, м. кл. НО2Р37/00, НО2Р8/00, опубліковано 10.01.98р.]. Загальним недоліком цих двигунів є низький ККД (порядку 0,01 та менше) та низький стопорний момент у обезструмленому положенні приладу, який не перевищує 0,1...0,2 номінального моменту. Відомі електромеханічні крокові двигуни, у яких електричні імпульси у обмотках електромагнітів перетворюються у дискретні кутові переміщення вихідного вала внаслідок механічних зв'язків між якорем та вихідним валом, наприклад, храповим механізмом, такі як кроковий електродвигун [за авторським свідоцтвом СРСР №1023567, м. кл. НО2К37/00, опубліковано 15.06.83] або кроковий електродвигун [за патентом РФ №2077108, м. кл. НО2К37/00,7/06, опубліковано 10.04.97]. Ці крокові електродвигуни мають достатньо високий стопорний момент, але їх недоліком є малий ККД (порядку 0,01) та малий ресурс роботи внаслідок ударного режиму роботи деталей (наявності співударних елементів). Низький ККД зазначених двигунів обумовлено принципом роботи - необхідністю швидкого розбігу якоря та подальшого гальмування, яке у першій з зазначених груп двигунів здійснюється гальмувальними електромагнітними обмотками, а у другій - механічним гальмуванням деталей. Таким чином, енергія, яку затрачено на розгін якоря та зрушуваного ним механізму у першому випадку повинна бути погашена енергією, яку затрачено на гальмування, а у другому випадку - витрачається на удар об гальмівний пристрій. Найбільш близьким за сукупністю ознак до пропонованого технічного вирішення є електромеханічний кроковий двигун [за авторським свідоцтвом СРСР №288109, НО2К37/00, опубліковано 03.12.70]. Відомий кроковий двигун як і той, що заявляється, містить вихідний кривошипний вал та нерухомо установлений у корпусі електромагніт, на осі якоря якого жорстко закріплено кулісу, що охоплює своєю вілкою цапфу кривошипного вала. На відміну від двигуна, що пропонується, відомий двигун містить також важіль та коромисло, причому важіль зв'язано зворотною пружиною з корпусом і другою пружиною -з нижнім кінцем коромисла, верхній кінець якого третьою пружиною зв'язано з корпусом. Відомий кроковий двигун має високий ККД та ресурс роботи. Високий ККД обумовлено тим, що енергія притягання якоря перетворюється механізмом крокового двигуна на першій ділянці, коли якір притягується підчас здійснення корисної роботи, у енергію розгону кривошипа та енергію натягування пружин, які на другій ділянці, підчас відпускання якоря, перетворюються у корисну роботу на привод механізму. Високий ресурс обумовлюється відсутністю у конструкції деталей, які співударяються та тертяться, та мінімальним спрацюванням взаємодіючих між собою поверхонь. Але відомий двигун має наступні недоліки: 1. Швидкодія двигуна обмежена, що обумовлено наступними причинами: - коромисло, яке змонтовано на цапфі вихідного кривошипного вала, та рухомі елементи опори мають значні маси і, відповідно, моменти інерції; - максимальна величина моменту, що створюється пружинним механізмом, який повинен подолати електромагніт, майже у три рази перевищує середній момент, що створюється на робочій ділянці. Відповідно у механізмі створюються великі зусилля, які потребують для забезпечення міцності збільшення розмірів деталей, що викликає збільшення моментів інерції та, у кінцевому результаті, не дозволяють при збільшенні потужності електромагніта у відповідній мірі збільшити швидкодію механізму. 2. Номенклатура крокових двигунів за авторським свідоцтвом №288109 обмежена, що обумовлено тим, що геометричні параметри деталей механізму такі, як радіус кривошипа, довжина плеч коромисла, довжина важілей та т.і. для забезпечення робочого моменту на вихідному валу пов'язані між собою складними залежностями і не можуть бути задані довільно. Тому, наприклад, зменшення радіуса кривошипа зменшує хід коромисла, відповідно зменшує момент для подолання мертвої точки, потребує збільшення довжини важіля та т.і., що перешкоджає створенню двигуна з меншою потужністю та більшою частотою спрацювання. 3. Галузь застосування відомого двигуна обмежена, бо для його реверсування необхідний перемикаючий електромеханічний пристрій, який змінює положення зачепа пружини, котра зв'язує верхній кінець коромисла з корпусом, що суттєво ускладнює конструкцію та схему керування і, крім того, зрушує початкове положення кривошипного вала під час реверсу на деякій кут від початкового положення при прямому ході (приблизно на 10% повного кутового кроку) і, отже, не дозволяє проводити реверсування з достатньою точністю. В основному винаходу поставлено задачу створити такий електромеханічний реверсивний кроковий двигун, у якому уведення другого електромагніта з кулісою, зміщення осей куліс відносно одна одної з утворенням кута між кулісами більше 0° та менше 180°, установка кривошипного вала з можливістю взаємодії з обома кулісами як у прямому так і у зворотному напрямках, дозволило б зменшити моменти інерції вихідного вала двигуна і, таким чином, збільшити його швидкодію; виключити необхідність дотримання складних залежностей між розмірами деталей двигуна і, таким чином, розширити номенклатуру двигунів; забезпечити реверсування двигуна без ускладнення його конструкції з забезпеченням достатньої точності і, отже, розширити його галузь застосування. Крім того, винахід, що пропонується, забезпечує одержання додаткового результату - спрощення двигуна, бо за рахунок уведення нових ознак у двигуні, що пропонується, відсутні важіль та коромисло, а також пружини, які забезпечують їх пружний зв'язок між собою і корпусом. Задача, яку поставлено, вирішується так, що у електромеханічний реверсивний кроковий двигун, який містить вихідний кривошипний вал і нерухомо установлений у корпусі електромагніт, на осі якоря якого жорстко закріплено кулісу, вилкою якої охоплено цапфу кривошипного валу, згідно з винаходом, уведені наступні суттєві ознаки, відмінні від прототипу. У кроковий двигун, що заявляється, уведено аналогічний електромагніт з кулісою. Осі куліс зміщенні відносно одна одної, причому куліси утворюють кут більше 0° і менше 180° і з'єднані відповідними пружними зв'язками з корпусом. Кривошипний вал установлено з можливістю взаємодії з обома кулісами у процесі його повороту як у прямому так й у зворотньому напрямках. Уведення другої куліси, яку підпружинено, розташовано під деяким кутом до першої куліси та установлено на осі якоря аналогічного електромагніта, дозволяє не тільки збільшити швидкодію за рахунок зменшення моментів інерції мас, що рухаються, та зниження максимальних навантажень на механізм, а також розширити діапазон номенклатури двигунів, що створюються, як у напрямку збільшення потужності за рахунок усунення геометрічних залежностей між деталями механізму. Виконання кривошипного валу таким чином, що взаємодіє з обома кулісами, дозволяє проводити реверсування простою зміною порядку надходження імпульсів у обмотки електромагнітів. На Фіг.1 показано кінематичну схему двигуна, що заявляється, на Фіг.2 - циклограму крутильних моментів, що створюються пружинами на вихідному кривошипному валу крокового двигуна, на Фіг.3 діаграму імпульсів керування. Електромеханічний реверсивний кроковий двигун містить дві куліси 1, 2, вихідний вал 3 з кривошипом 4. Куліси 1, 2 розміщені відповідно на осях 5, 6, що обертаються, якорів 7, 8 електромагнітів 9, 10. Куліси 1, 2 відповідно пружинами 11, 12 зв'язані з корпусом 13. Куліси 1, 2 охоплюють своїми вилками цапфу кривошипа 4 вихідного вала 3. Осі 5, 6 зміщені відносно одна одної таким чином, що куліси 1, 2 утворюють кут, величина якого більше 0° і менше 180°. Двигун, що пропонується, працює таким чином. У початковому стані механізм знаходиться у стійкому врівноваженому становищі за рахунок дії пружин 11, 12. На циклограмі (Фіг.2) показані положення верхніх мертвих точок (ВМТ) та нижніх мертвих точок (НМТ) деталей механізму. Вище осі абсцис (Фіг.2) показані додатні моменти, що створюються пружинами 11, 12 під час обертання вихідного кривошипного вала 3 за годинниковою стрілкою. Нижче осі абсцис від'ємні моменти. Відповідно під час обертання вихідного кривошипного вала 3 проти годинникової стрілки додатні моменти, що спрямовані у сторону обертання, розміщуються під віссю абсцис. При поданні імпульсу струму у обмотку одного з електромагнітів (ЕМ), наприклад, 9 (Фіг.3а), якір 7, притягуючись під дією електромагнітного поля до осердя, тягне за собою кулісу 1, яка, повертаючись навколо осі 5 за годинниковою стрілкою, вилкою тисне на цапфу кривошипа 4 вихідного вала 3 і розтягує пружину 11. Під дією куліси 1 та куліси 2, що притягується пружиною 12, кривошип 4 вихідного вала 3 починає повертатися за годинниковою стрілкою до верхньої мертвої точки пари куліса 2 - кривошип 4. Поблизу мертвої точки у обмотку електромагніта 10 подається імпульс струму (Фіг.3б) і якір 8, притягуючись до осердя, розвертає кулісу 2 навкруги осі 6 проти годинникової стрілки, розтягуючи пружину 12. Куліса 2 вилкою тисне на кривошип 4 у напрямку обертання вихідного вала 3 за годинниковою стрілкою. Поблизу нижньої мертвої точки пари куліса 1 - кривошип 4 з обмотки електромагніта 9 знімається напруга і куліса 1, повертаючись під дією пружини 11 проти годинникової стрілки, допомагає електромагніту 10 рухати вихідний кривошипний вал 3 за годинниковою стрілкою до нижньої мертвої точки пари куліса 2 кривошип 4, поблизу якої з електромагніта 9 знімається напруга. Рух вихідного кривошипного вала 3 до початкового становища продовжується під сумарною дією пружин 11 та 12. Обертання у зворотному напрямку відбувається при подачі імпульса струму спочатку у обмотку електромагніта 10 (Фіг.3в), а потім у обмотку електромагніта 10 (Фіг.3г). Таким чином, уведення нових ознак дозволило створити електромеханічний кроковий двигун з можливістю реверсування, з високими ККД, ресурсом роботи, швидкодією та ширшим діапазоном потужностей.
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromechanical reversible stepping motor
Назва патенту російськоюЭлектромеханический реверсивный шаговый двигатель
МПК / Мітки
МПК: H02K 37/00
Мітки: кроковий, електромеханічний, реверсивний, двигун
Код посилання
<a href="https://ua.patents.su/4-73219-elektromekhanichnijj-reversivnijj-krokovijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Електромеханічний реверсивний кроковий двигун</a>
Багатополюсний кроковий двигун
Номер патенту: 8332
Опубліковано: 29.03.1996
МПК: H02K 37/00, Мішель Шваб /СН/, Май Ксуан Ту /СН/
Мітки: двигун, багатополюсний, кроковий
Текст:
...двигателе углового шага зубцов статора а* отличным от углового шага пар полюсов ротора Of и заданием связи между ними соотношением (кукуют (где К =0,8-1,2; Or -2 JT/N, где N-число пар полюсов). Подбором параметра К в указанных пределах можно значительно ослабить влияющие на позиционирование ротора паразитные моменты Мраг, являющиеся гармониками высшего ряда силового момента Mi. Например, можно добиться устранения второй и четвертой...
Лінійний електромагнітний двигун
Номер патенту: 42161
Опубліковано: 15.10.2001
Автори: Скубій Леонід В'ячеславович, Косенков Володимир Данилович
МПК: H02K 41/02
Мітки: електромагнітний, лінійний, двигун
Формула / Реферат:
Лінійний електромагнітний двигун, який включає здвоєний тяговий електромагніт, зв'язаний з ним якір, нерухому гладко профільну напрямну розташовану по всьому шляху переміщення, та гальмівні електромагніти - фіксатори, які встановлені на феромагнітних кронштейнах якоря та тягового електромагніта, який відрізняється тим, що двигун виконано з двох однакових частин, причому кожний гальмівний електромагніт жорстко зв'язаний з гальмівною колодкою і...
Роторно-лопатевий двигун внутрішнього згоряння

Номер патенту: 35626
Опубліковано: 16.04.2001
Автор: Гуменюк Сафроній Васильович
МПК: F02B 53/00
Мітки: внутрішнього, згоряння, роторно-лопатевий, двигун
Формула / Реферат:
1. Роторно - лопатевий двигун внутрішнього згоряння, який має корпус у вигляді кільцевого циліндра з вікнами газорозподілу і боковими кришками, в якому розміщено колінчастий вал, ротор і лопаті з ущільнюючими пластинами, який відрізняється тим, що внутрішній діаметр його корпусу більший від зовнішнього діаметра ротора на величину радіуса коліна колінчастого вала, а сам ротор кінематично зв’язаний як з корпусом, так і з колінчастим...
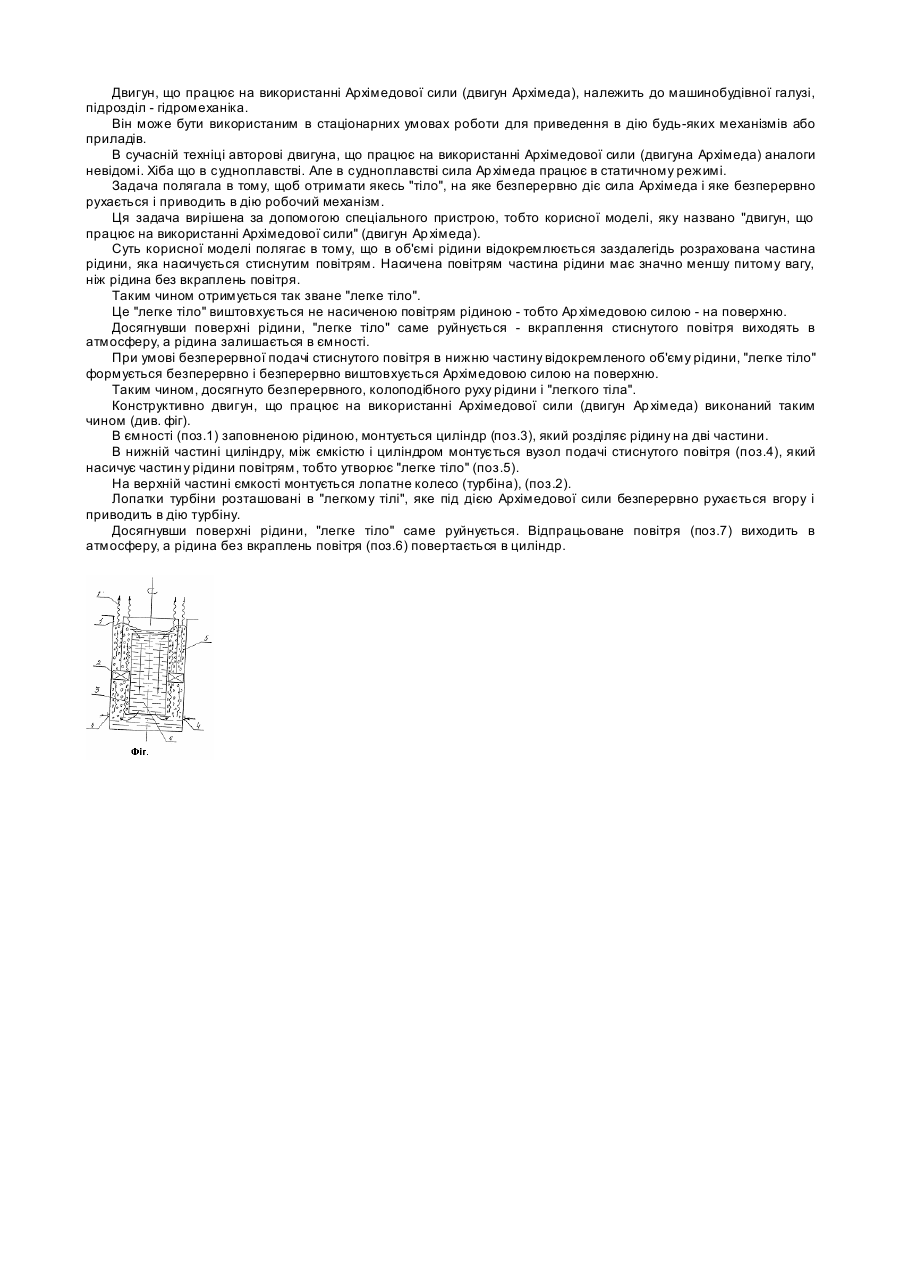
Двигун, що працює на використанні архімедової сили (“двигун архімеда”)
Номер патенту: 2912
Опубліковано: 15.09.2004
Автор: Турлаков Петро Петрович
МПК: F04B 23/00
Мітки: використанні, архімедової, архімеда, двигун, працює, сили
Формула / Реферат:
Двигун, що працює на використанні Архімедової сили, який містить ємність, заповнену рідиною, циліндр, в нижній частині якого, між ємністю і циліндром розташований вузол подачі стиснутого повітря, а в верхній - між ємністю та циліндром, розташоване лопатеве колесо (турбіна) для відбору Архімедової сили, яка діє на центр ваги "легкого тіла", яке утворюється між стінками ємності і циліндра завдяки насиченню рідини стиснутим...
Двигун зворотно-поступального руху
Номер патенту: 3168
Опубліковано: 15.10.2004
Автори: Цодік Ігор Абрамович, Поляков Олег Володимирович
МПК: H02K 33/00
Мітки: двигун, руху, зворотно-поступального
Формула / Реферат:
Двигун зворотно-поступального руху, що містить нерухомий статор і рухомий якір з магнітопроводами, які мають різну ширину полюсів та обмотки, по одній з яких протікає постійний, а по іншій - змінний струм, який відрізняється тим, що статор містить корпус з розміщеними усередині нього полюсами і котушками кільцевої форми, які розташовані один за одним, із зміненими знаками потенціалу, а якір має остов, на якому встановлені один за одним...
Попередній патент: Схема регулятора напруги для інтегральних мікросхем чіп-карток
Наступний патент: Міні-дробарка зернових матеріалів
Випадковий патент: Дробильно-сортувальна установка